

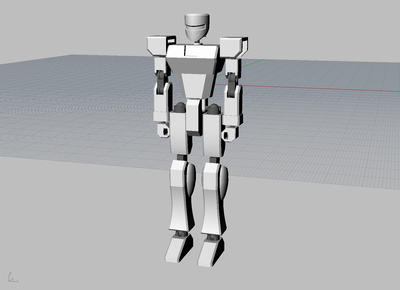
最終的に3Dプリンタで出力し、組み立てるにはCAD上でのモデリングが必要になります。 しかし、CADだけでデザインをしていくのは少々厳しい物があります。 そこで、あらかじめスケッチや図面を描いておくことで、ロボの形状を自己把握することができ、円滑なモデリングが可能となります。この工程を紹介します。 ※この事前ワーク①は、11月14日のイベントに参加する場合、事前に必ず行ってください。
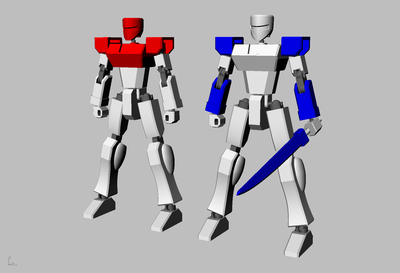
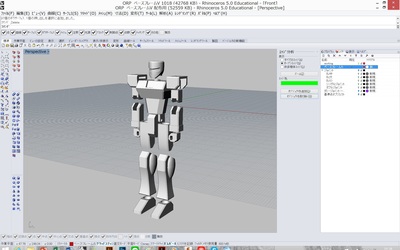
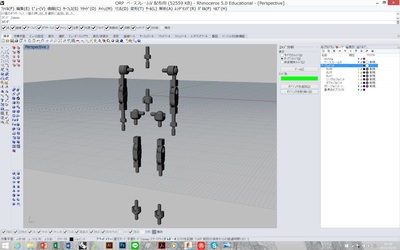
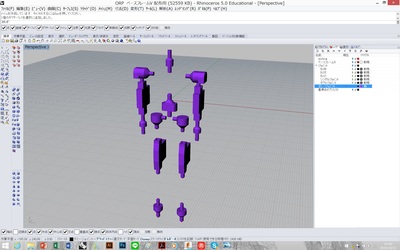
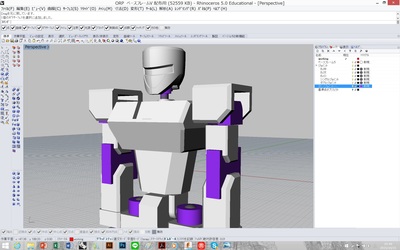
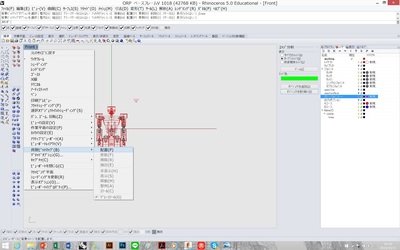
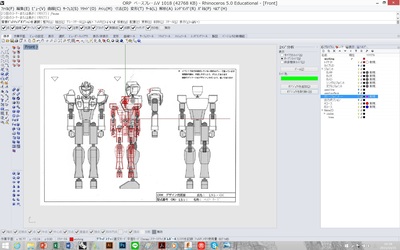
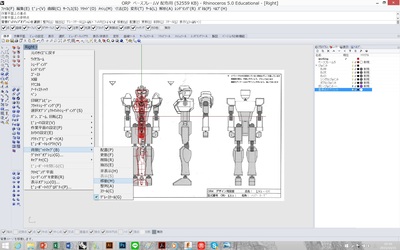
- オリジナルのロボットを出力すると言うからには、皆さんにロボットの全身を出力していただきたい・・・のですが、時間やコストの関係で、今回のイベントでは部位を限らせていただきます。Aコースでは頭・胸部・肩(赤い表示の部分)、Bコースでは肩・腕・武器(青い表示の部分+α)をデザイン・出力する形になりますので、いずれかを選択して作業・モデリングを進めてください。(白い部位の出力は時間の都合上、行いません)
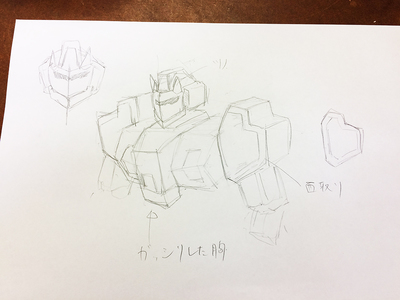
- どんなものを出力したいか、想像力を働かせ、白紙にスケッチしましょう。 もちろん、自分の参加するコースで出力する部位を描いてください。 上手下手は関係ありません。自分でどんな形か、把握できる程度であれば結構です。 あまりにも大きすぎたり(出力時間がかかりすぎる)、小さすぎたり(ジョイントが入らない)しないよう注意してください。細かすぎるディテールも出力できないので 避けるようにしましょう。
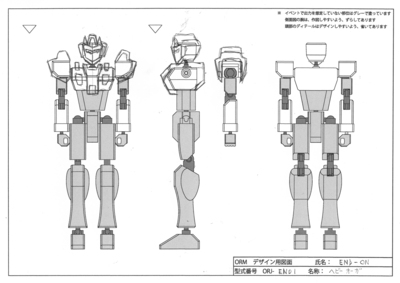
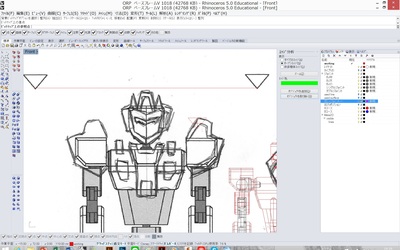
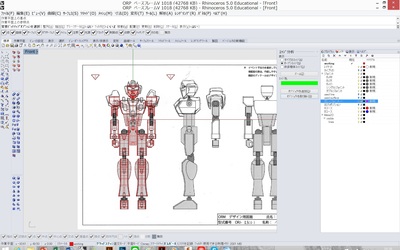
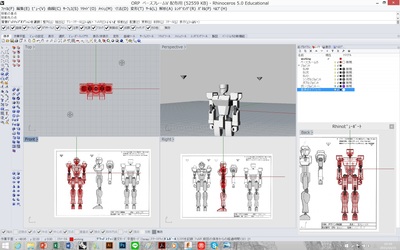
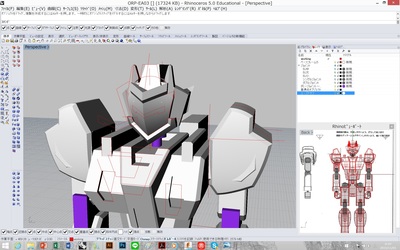
- 次に、スケッチをもとに図面を作成します。下から専用の図面をダウンロードし、 イラストレーションソフトで描いたり、プリントアウトしてペンや鉛筆で描きます。 この図面は正面・側面・背面ですが、すべてに描き込む必要はありません。 これも自分が形状を理解でき、Rhinocerosでモデリングする際に目安となる程度で構いません。 注意点 1黒い線ではっきり描くこと。 2着彩は行わず、白黒で描くこと。 ORMデザイン用図面(JPG) ORMデザイン用図面(PDF)

Comments