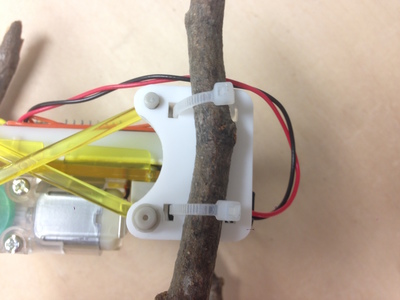
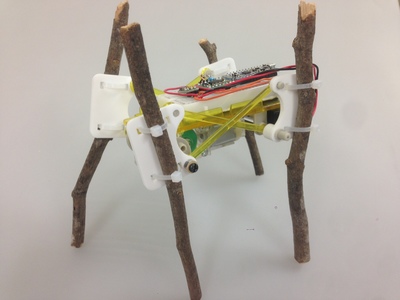
WalkingTreeは自然から最適な木の枝や植物を採取し胴体とすることで,歩く植物とする自立型ロボット玩具である.上部の植木鉢に採取した植物や木の枝を植え,体験者の想像した歩行植物ロボットとして完成する.
完成後は,自立したロボットとして動き始める.太陽光の当たる場所に辿り着くと,動力のモーターはソーラー充電器により蓄電され,上部に植えられた植物は光合成を行う.太陽光エネルギーによって光合成と発電を行う,いわば動く植物である.
WalkingTree is a stand-alone robotic toy which consists of natural branches and plants. As users play with this toy in nature,so user become sensitive to nature materials.Users attach the collected branches and plants into the pot to complete a walking botanical robot which they have imagened. The ways of toy's walking change according to a length and a position of attached branches. After the robot is completed, the WalkingTree will start to move as a stand-alone robot. When it reaches a sunny place, its solar cell charges and its plants will start to photosynthesize. WalkingTree photosynthesize and generate electricity by solar energy.
English tutorial >>
http://fabble.cc/fablabkamakura/fabwalker 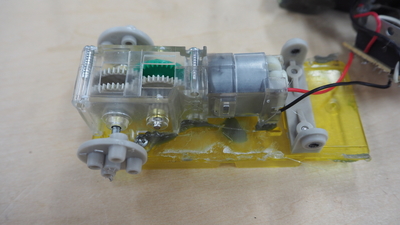



Comments