
材料等
0
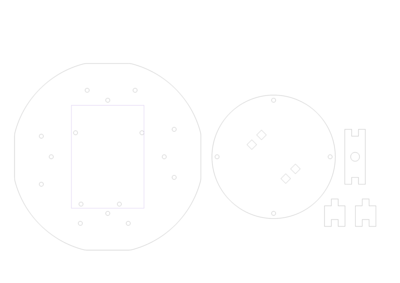
板材:400mm×140mm 板厚5mm
その他
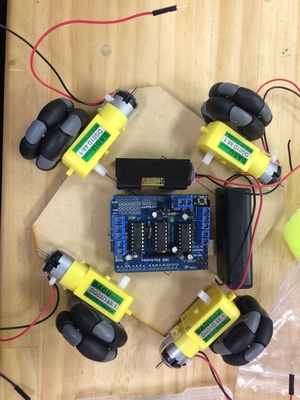
Arduino UNO R3 ・・・1個
L293D モータードライブシールド (サインスマート Arduino UNO用) ・・・1個
オムニホイール(LEGO用 48mm[14108]) ・・・4個
ホビー用 ギヤドモーター(DAGU HighTechElectoronic)
9V角形電池 ・・・2個
9V角形電池用スナップ ・・・2個(内1個はDCコネクタタイプ)
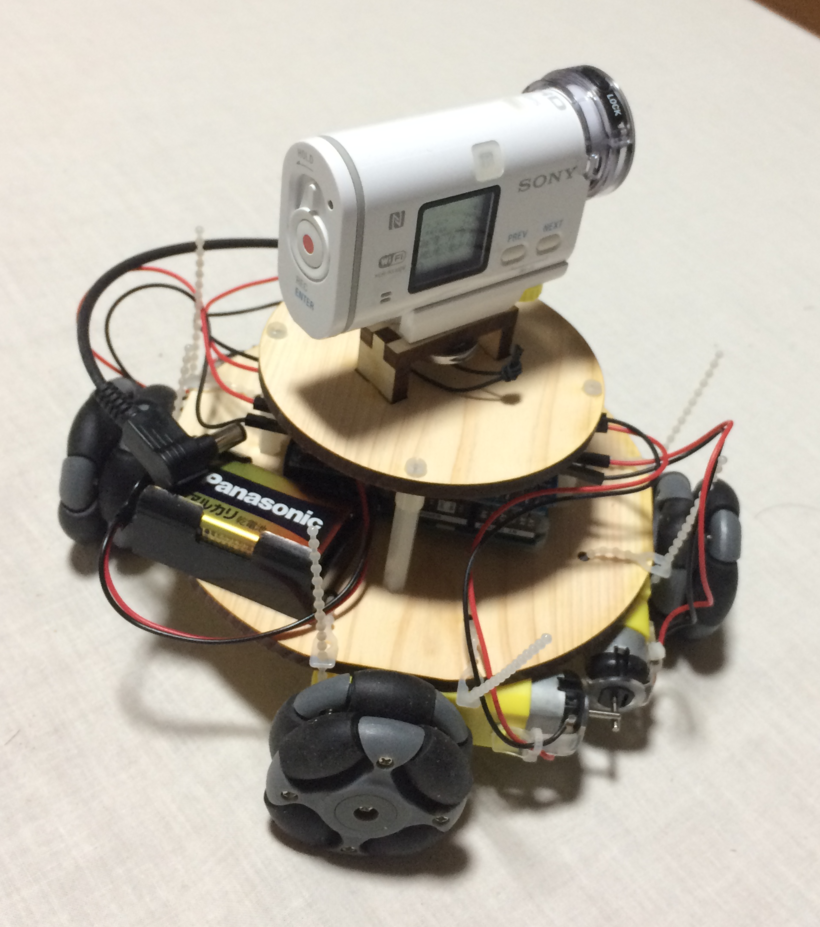
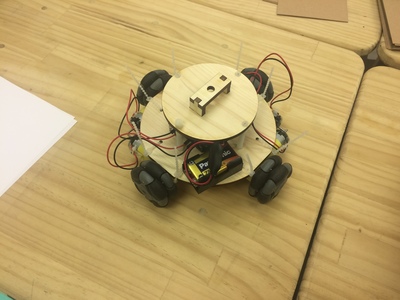
カメラ (今回はSONY ActionCAM AS100V使用)
ネジ等 必要数
結束バンド等 必要数


Comments