確認
インストール後Arduinoのシリアルモニタを開いて
$$
と入力すると、設定値がいろいろと出てきたら、OKgrblの設定を変更(ステップ/mm)
GRBLの1mm移動するのに必要なステップ数の設定
各軸ごとに計算をする
■確認すること
・リードスクリューのピッチ(1回転で何mm進むか)
・ステッピンモータの1回転ステップ数(ステッピンモータのデータシートで確認:200が一般的)
・マイクロステップのコントロール(2, 4, 8,などモータドライバで設定して場合。してなければ1)
■計算例
今回はリードスクリューのピッチ2mmとして計算
(200ステップ×1マイクロステップ)/2mm=100ステップ/mm
X軸($100)
例)100ステップ/mmの場合
シリアルモニタで
$100=100
と入力
Y軸($101)
例)100ステップ/mmの場合
シリアルモニタで
$101=100
と入力Z軸($102)
例)100ステップ/mmの場合
シリアルモニタで
$102=100
と入力A4988モータドライバ
モータに過電流が流れないようにする。
電流制限の設定
ステッピングモータの許容電流=V x 2.5(新型は1.84)
で計算
例えば、ステッピングモータの許容電流が0.33Aの場合
V=ステッピングモータの許容電流/2.5=0.33/2.5=0.13
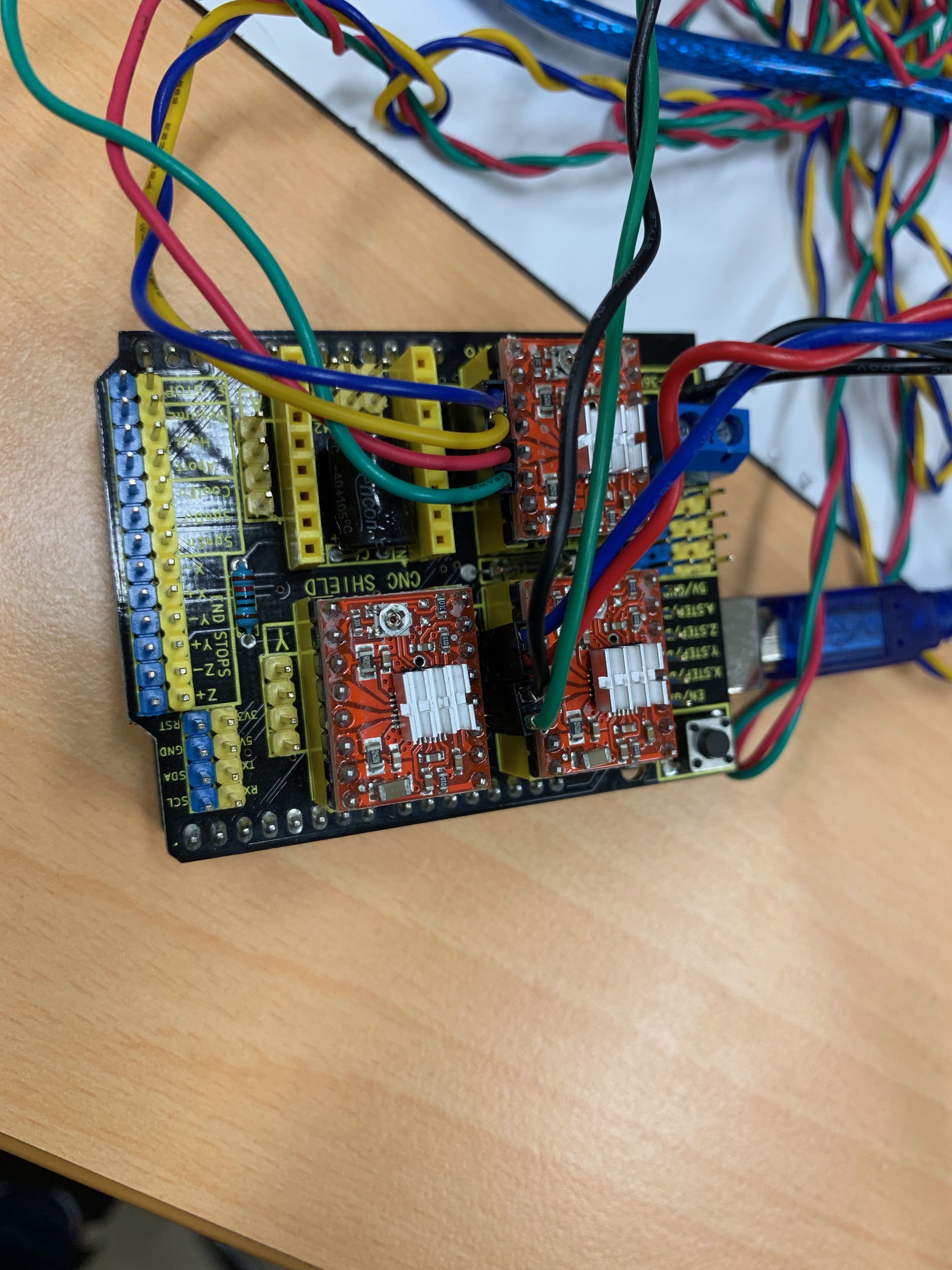
接続例
クローンする場合
ここを参照
ステッピンモーター が脱調する場合
各軸の動作可能な最大レートの設定である$110,$111,$112の数値を下げましょう。