基板設計
基板については今後の拡張性を考えて、各機能をモジュール化することとします。
①ステッピングモータドライバのステッピングモジュール(ステッピングモーター1個につき1基板)
②制御に使うステッピング制御モジュール(Arduino Unoにつけるシールド)
③今回コントロール用に使うキャパシティブセンサーのキャパシティブモジュール
の3つのモジュール化された基板を作ります。
ステッピングモーターは秋月のバイポーラ ステッピングモーターSM-42BYG011を使うこととします。
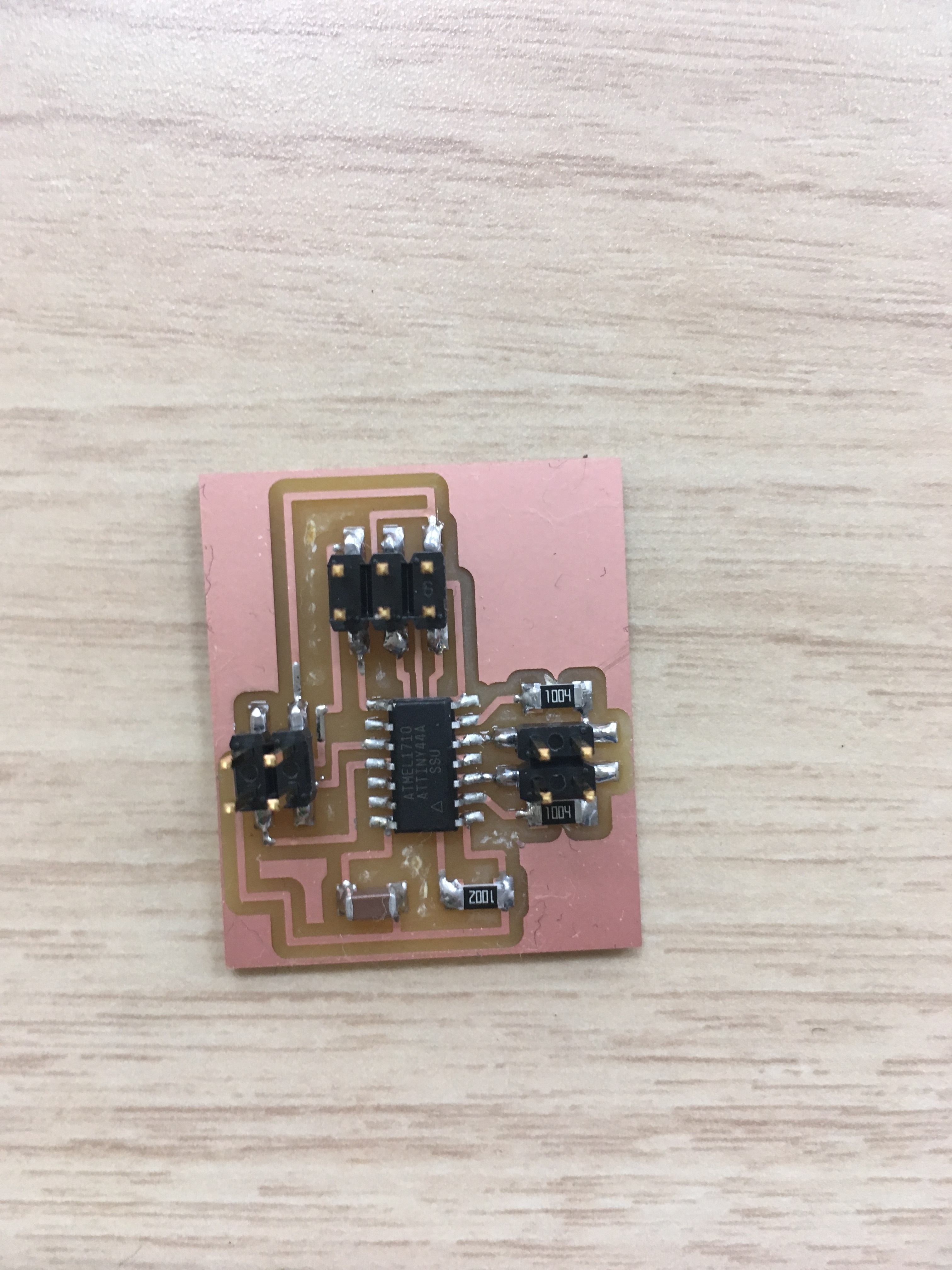
ステッピングモジュール
このモジュールの入力端子は今後複雑な制御をすることも考え、Enable, Direction, Stepの3つを用意した。今回はEnableとDirectionだけを使って制御することとし、Stepはドライバ内であらかじめ指定しました。
SRM-20用のデータ(rml)
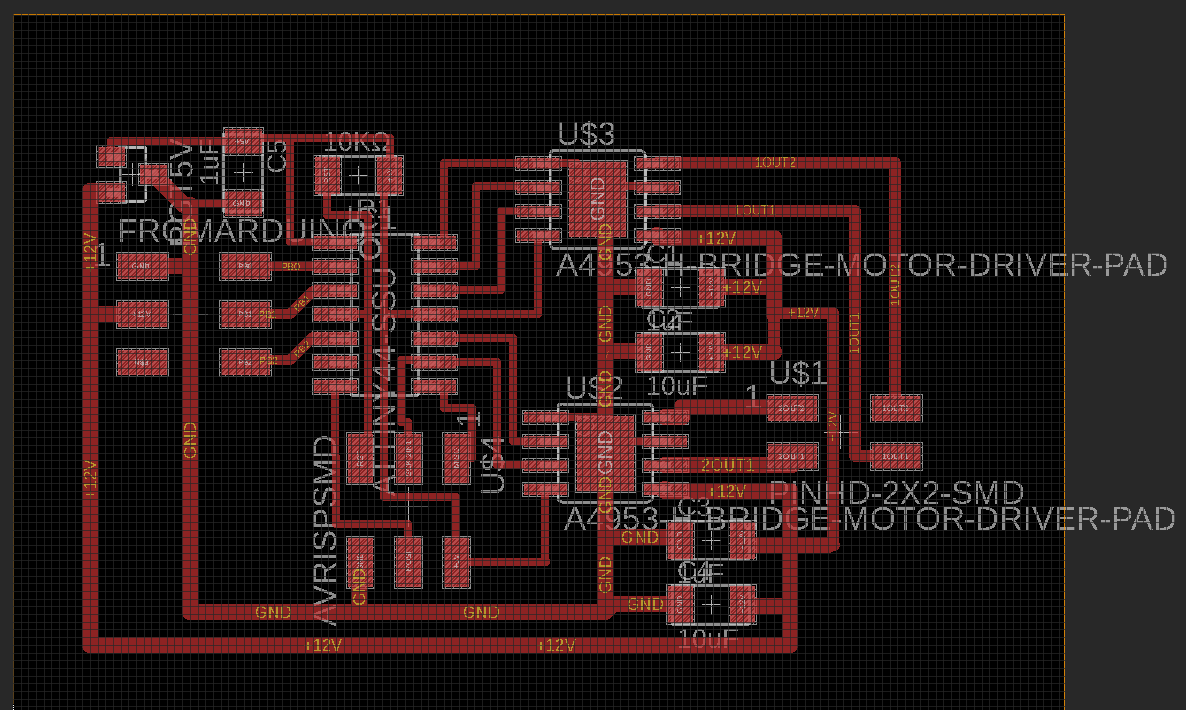
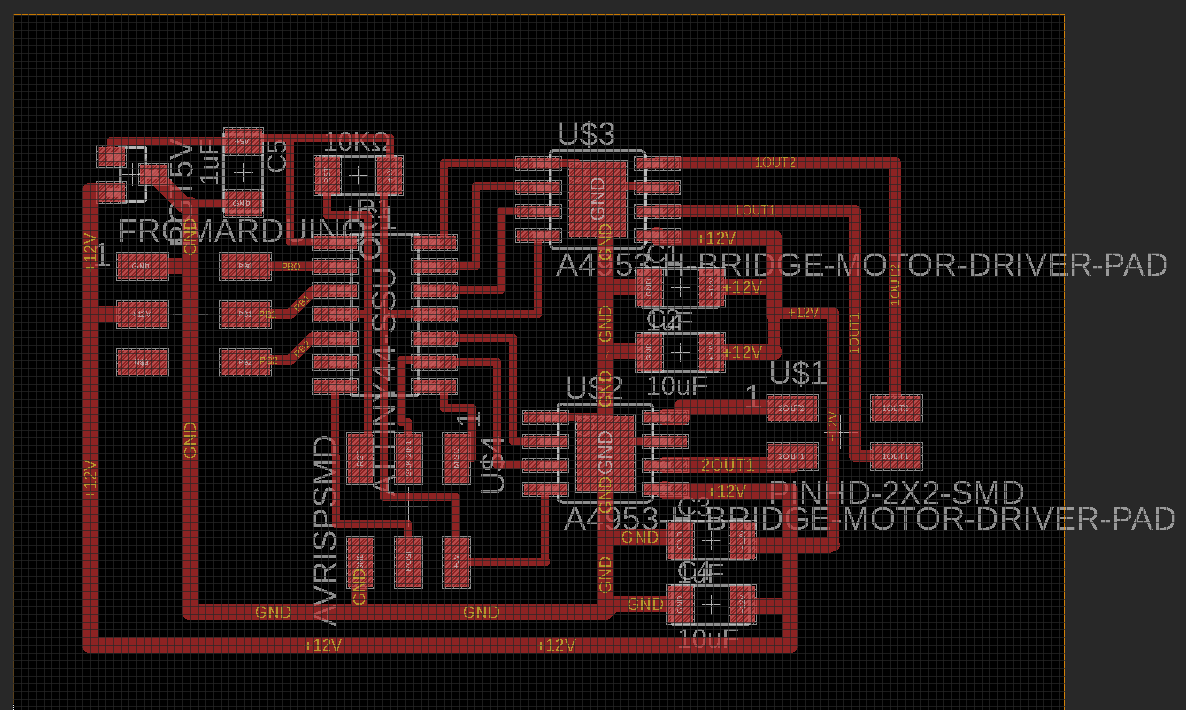
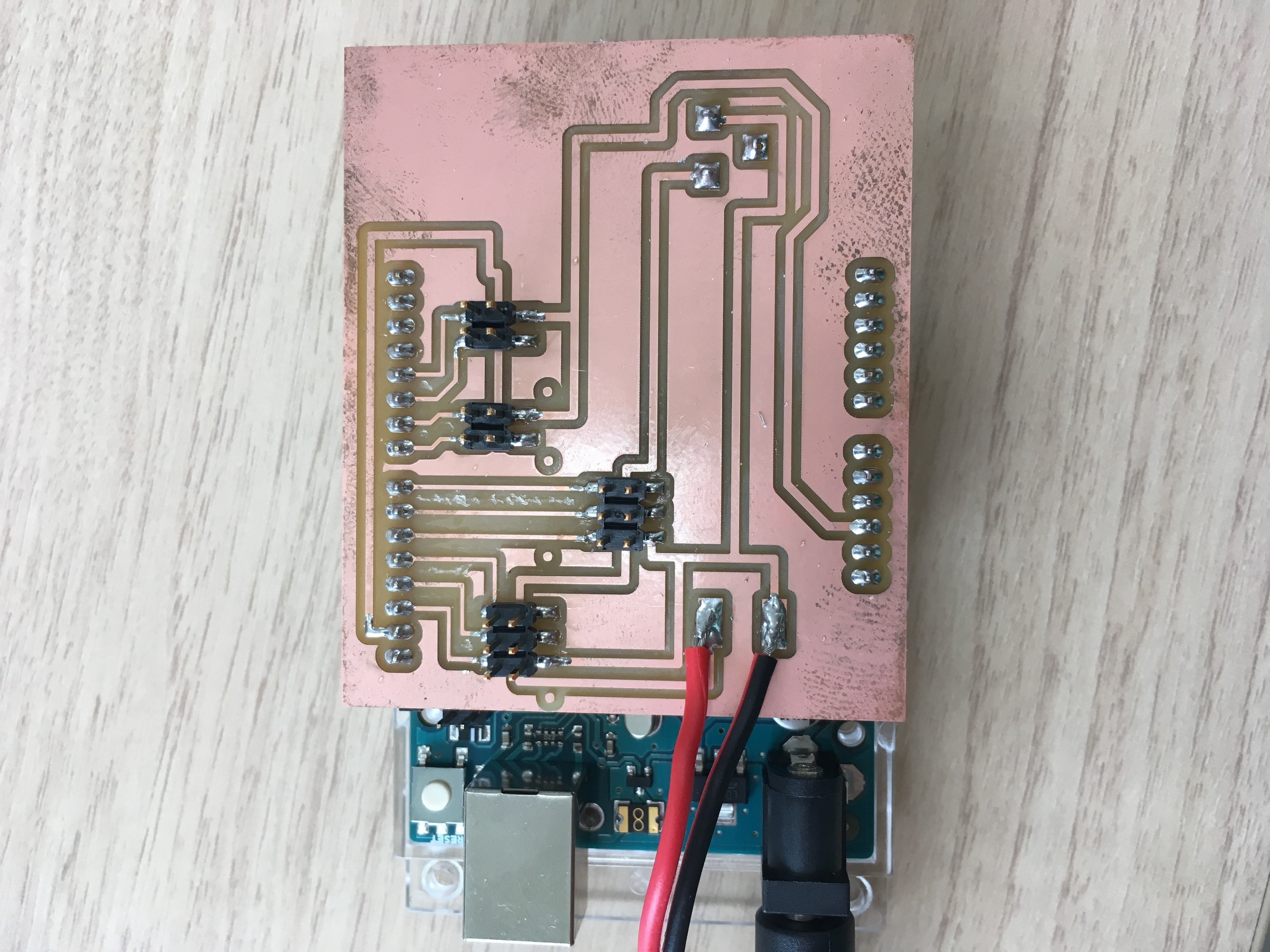
制御モジュール
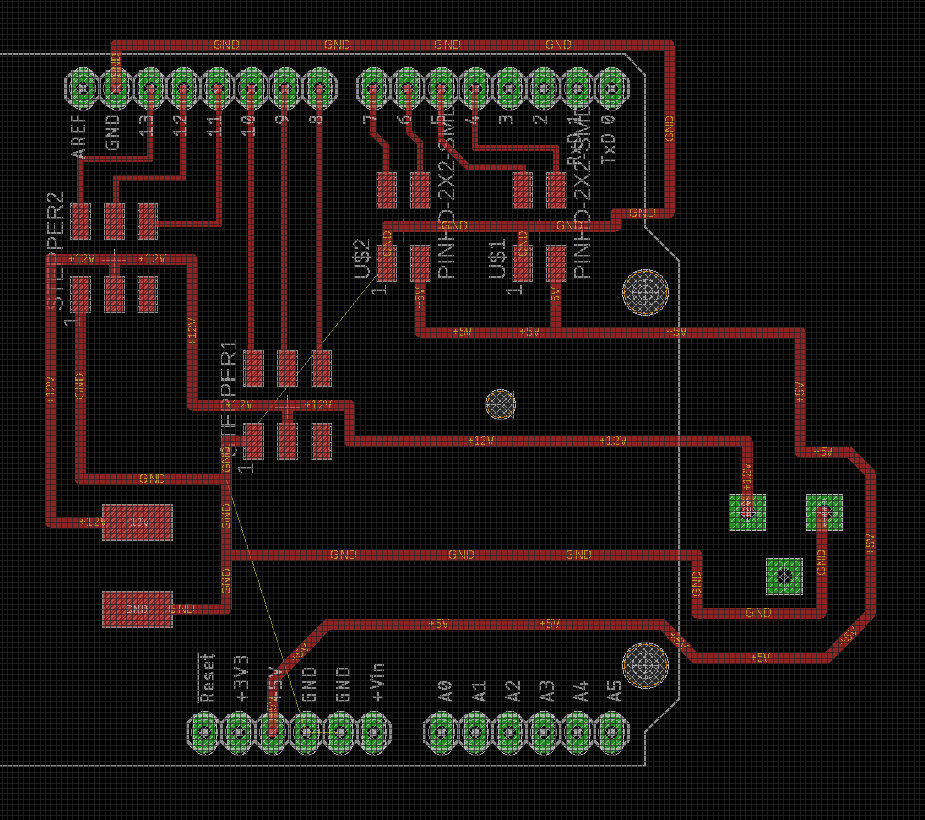
制御モジュールはArduino Unoに取り付けて使うシールドとした。
機能としては、
・入力デバイス(今回はキャパシティブモジュール)から信号を受け取り、2つのモータドライバに回転指示の信号を送る
・12V電源の供給
将来的に複雑な制御をする場合は入力デバイスに接続せずに、ArduinoをPCに接続してプログラムを書き換え制御できる構造にしてある。
SRM-20用のデータ(rml)
※SRM-20を使用しない場合はpngファイル(制御モジュール)を使用してツールパスを作成します。
キャパシティブモジュール
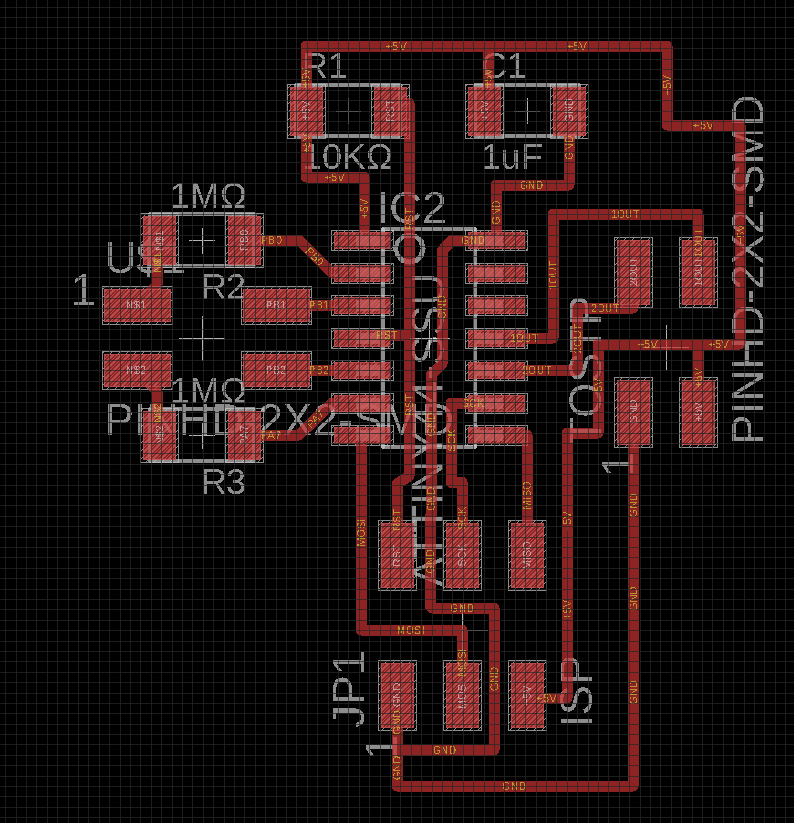
キャパシティブセンサーモジュールは、モジュール内で2つのキャパシティブセンサーのタッチを検出し、2つあるアウトプット端子にそれぞれ、ON-OFF(HIGH-LOW)を出力する。
SRM-20用のデータ(rml)
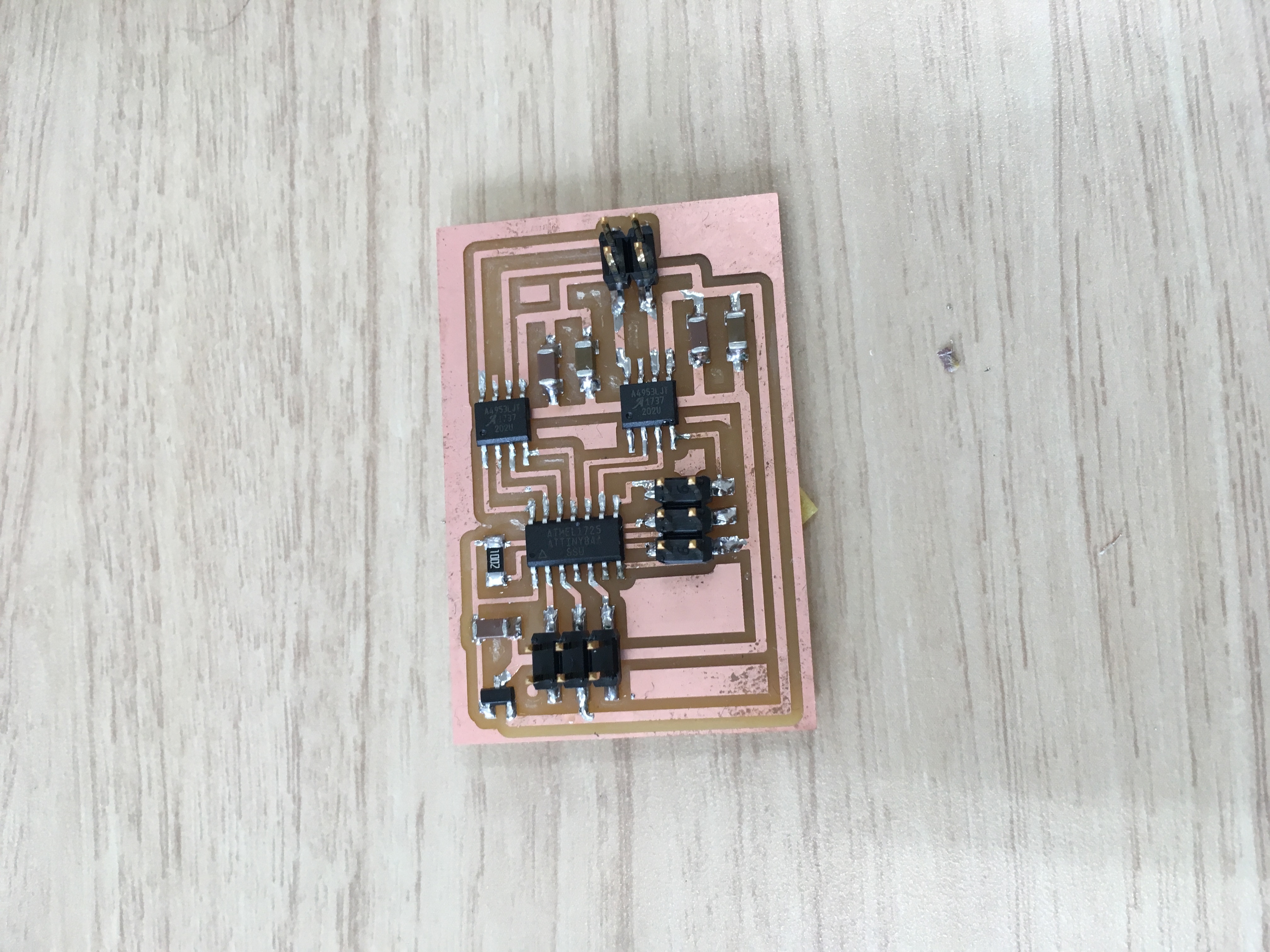
基板の作成
回路の切削には1/64inchのエンドミル、外枠の切削には1/32エンドミルを使用します。
(mmではなく、inchのエンドミルを使うのはファブラボの標準機材に合わせるためです。)
SRM-20でinchエンドミルを使うにはコレットを標準の6mm径シャンク用コレットではなく、3.175mm径シャンク用コレットを使用します。
基板設計のステップにある回路データ、外枠データを使ってSRM-20で基板を切削します。
ステッピングモジュール
1個あたりの必要部品は下記の通りです。2つ作るので倍の数が必要になります。
コンデンサ 1uF (3 個) サイズ:inch(1206) mm(3216)コンデンサ 10uF (2 個)サイズ:inch(1206) mm(3216)
チップ抵抗 10KΩ (1 個) サイズ:inch(1206) mm(3216)
レギュレータ 5V LM 3480IM3-5.0(1個)
6 ピンヘッダ(2 個)
4 ピンヘッダー (1 個)
プログラム
Arudino IDEで↓のプログラムを書き込みます。
ステッピングモーターの接続
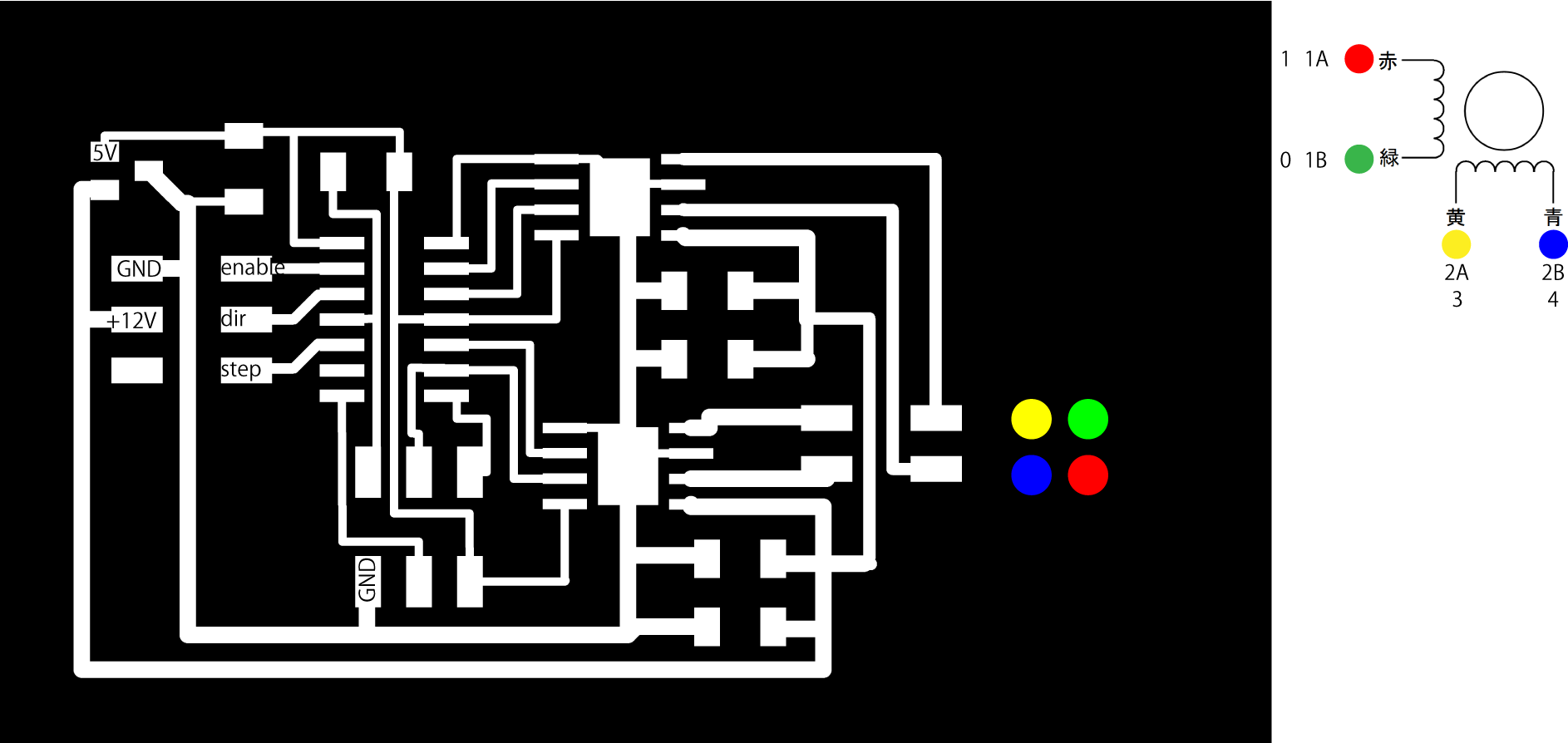
この色に対応してステッピングモータを接続
キャパシティブモジュール
コンデンサ 1uF (1 個) サイズ:inch(1206) mm(3216)
チップ抵抗 10KΩ (1 個) サイズ:inch(1206) mm(3216)
チップ抵抗1M(4個)サイズ:inch(1206) mm(3216)
DCオス電源ピグテール 2.1×5.5mm
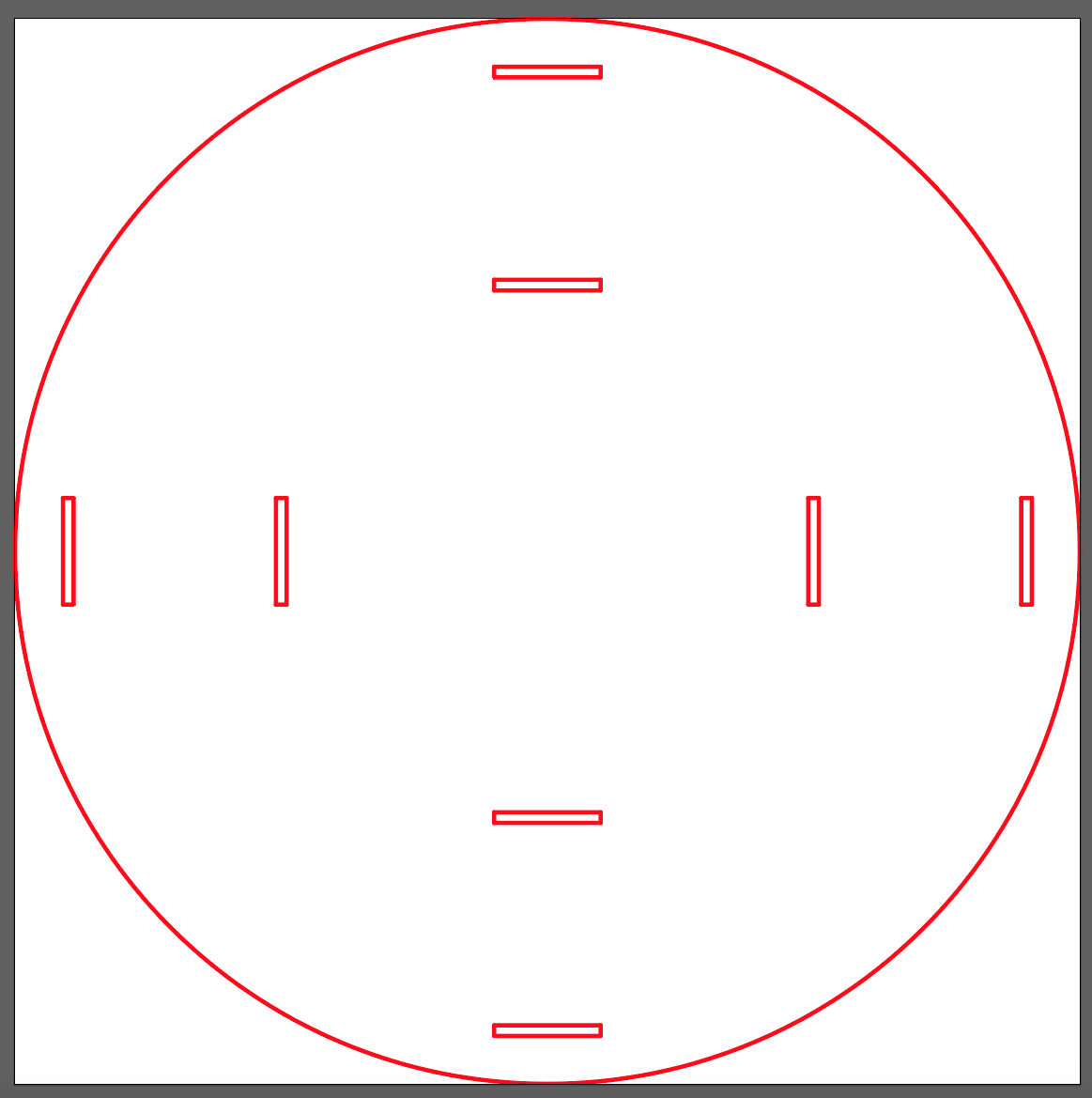
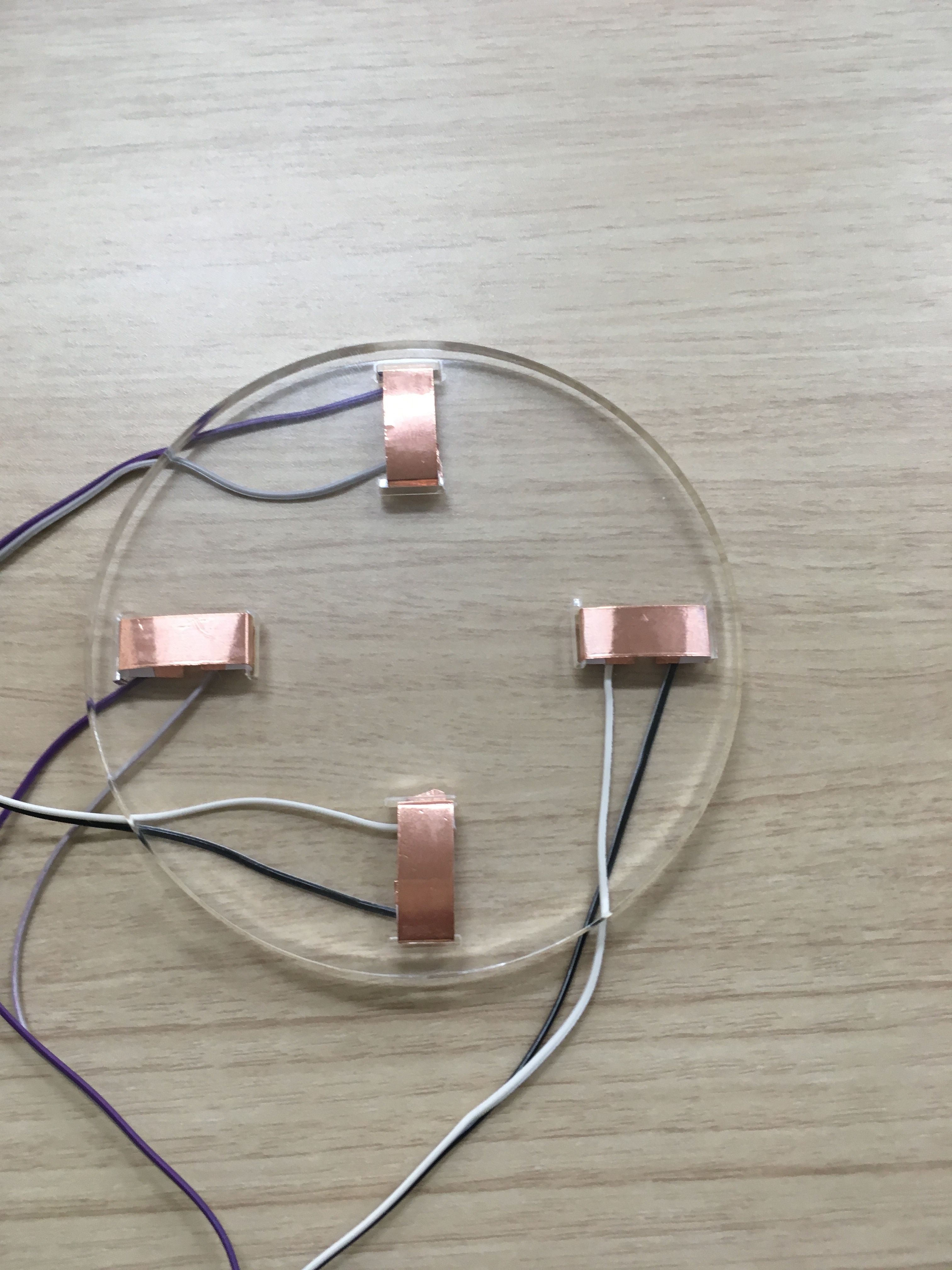
コントローラー
今回はGコードを読み取るものではなく、コントローラーを使って手動で2軸を動かす。
コントローラーはボタンの代わりに、銅箔テープを利用したキャパシティブセンサー を使う。
テッピングモーター(正転、反転)×2で4つのキャパシティブセンサーが必要になる。
キャパシティブモジュール1つにつき2つのキャパシティブセンサー を接続できるので、2つのキャパシティブモジュールを使用する。