1. 発端

発端は2016年4月、ファブラボ鎌倉の朝ファブにて筋電義手
HACK Berry(Exiii)の話題が出たことです。※①
HACK
Berryは3Dプリンター製の義手でデータが公開されており、3D作品のテーマとして興味を持ちました。
その後、朝ファブで自作品にチャレンジした事がありましたが、難しくて断念した経緯があります。
2. 転機
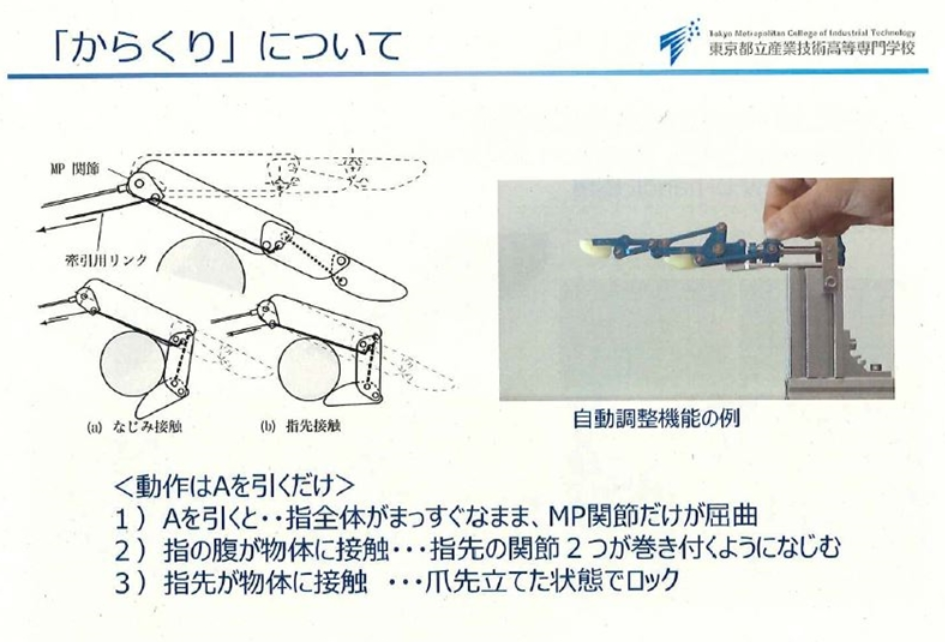
転機は2018年2月、朝ファブで「からくり」画像を見せていただいた事です。※②
その画像にあった『東京都立産業技術高等専門学校』をキーワードにして『自動調整機能の例』にある画像の情報を探しました。
その画像にあった『東京都立産業技術高等専門学校』をキーワードにして『自動調整機能の例』にある画像の情報を探しました。
2-1. キーワード(協調リンク機構)
検索の過程で「協調リンク機構」というキーワードを見つけ、ダブル技研株式会社の『D-Hand』に辿り着き、そこでYoutube動画を見つけました。※③
2-2. 検証
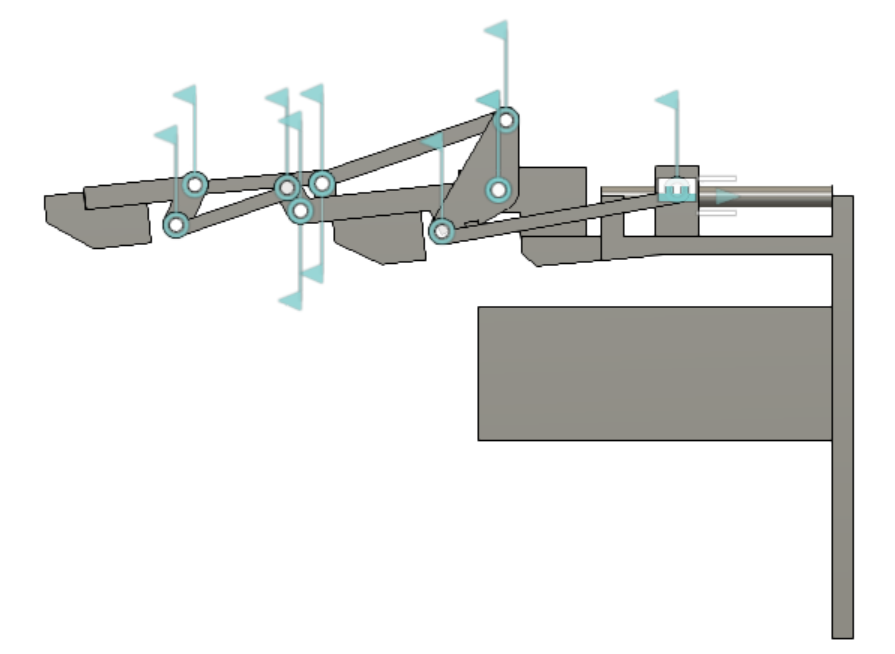
動画から D-Hand の構造を推測してFusion 360 でモデルを作成し、動作を検証しました。
それによって協調リンク機構がどういう仕組みなのか理解できました。
画像は検証に用いた Fusion 360 のモデルです。
3. 『握りん君』着想と設計
私は職場にいた時、事故で手指に障害(欠損、麻痺)を負った人達が普段の生活では手の使い方を工夫して大体の事はこなしていたのを見ました。
けれども細かい物を扱うのが大変そうで、身の回りの何かを道具にしている人もいました。
そこで、そうした人達の道具として『握りん君』を着想しました。
以降、そうした人達を”ターゲット”と呼ぶ事にします。
3-1. 何が”大変”?
細かい物を扱うのが”大変”そうとは言っても指が不自由なので、あらゆる面で”大変”だろうと先入観を持つと、本物の手と同様の機能を追求する事になります。
ターゲットは、そこまでの道具は求めないだろうと思いました。
そこで特に”大変”なのは何かと考えた時、普段私たちが何気にやっているけど健常な手でも”大変”な作業=テーブルや床など平坦な面にある小物を拾う事ではないかと考えました。
拾い上げて何処かに置ければ目的のタスクを達成できる場合が多いのではないでしょうか。
3-2. 握る、摘まむ
手で物を扱う時、物を握ったり摘まんだりします。
一見同じ動作に思えますが、摘まむ場合は2本以上の指が衝突する構造となり、指が衝突すると小さな物は握れなくなります。
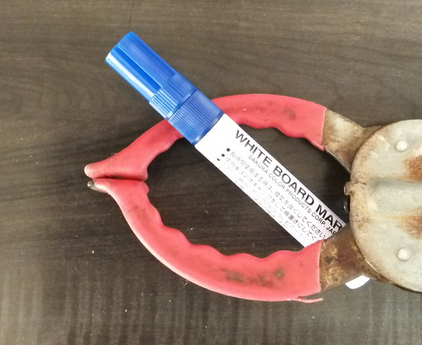
画像はマジックハンドの例ですが、摘まめるけど握れません。
これが『握りん君』設計上の最も大きな課題のひとつでした。
3-3. 指
指は協調リンク機構を採用する事にしました。
これはセンサーレス、モーターレスで握った物の形状に馴染んで関節が曲がり、握る(grasp)と摘まむ(pick)を両立させる事ができそうに思ったからです。
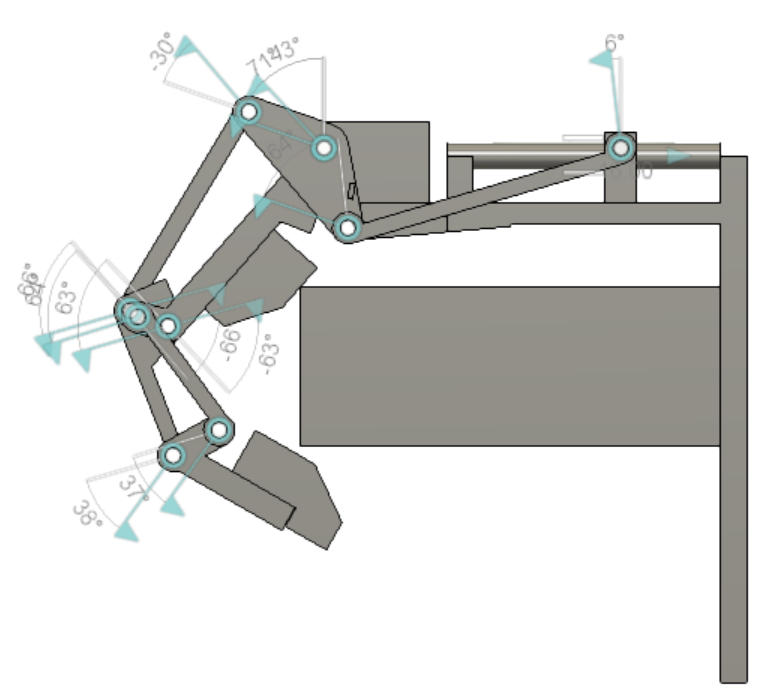
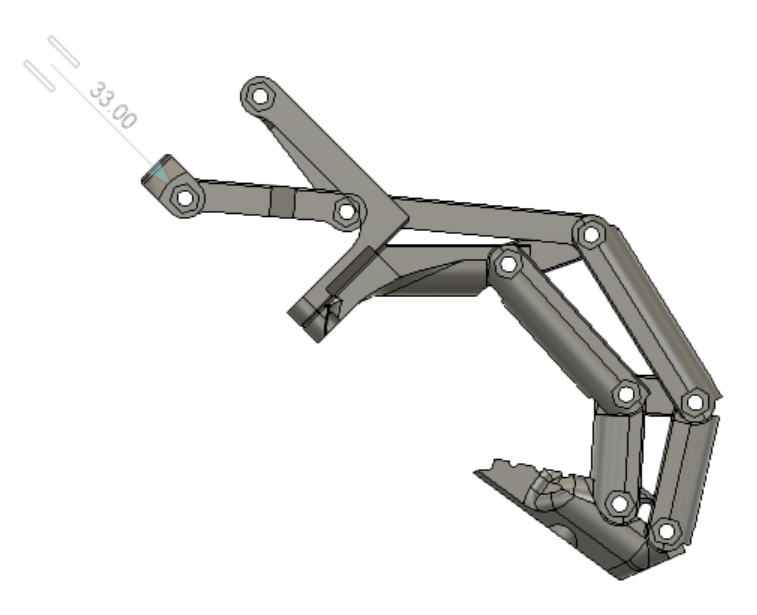
画像は実際に設計した『握りん君』の指の関節を最大限に折り曲げたところです。
実際には、指が曲がる途中で物に接触した場合は違った曲がり方になります。3-4. 動力
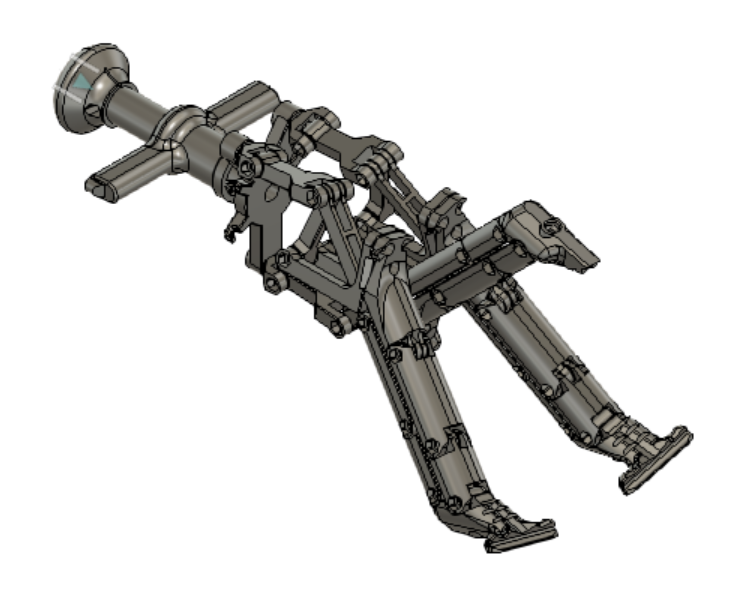
指を動かす動力はアクチュエータを使用せず、手のひらで握る力を使う事にしました。
ターゲットの多くは指が不自由でしたが手のひらは使えていましたので、『握りん君』も使えると考えました。
画像は実際に設計した『握りん君』の内部です。
3-5. 命名
動力として握る力を採用した事から『握りん君』と命名しました。
また、英字名はリンク機構をもじって『 NigiLinkng 』としました。
3-6. 余談(ポリシー)
私は3Dプリント部品の設計と出力に、以下のポリシーを持っています。
・可能な限りサポート無しでプリントできる形状とする事。
・原則としてラフト無しでプリントする事。
今回、これを全てクリアしました。
このポリシーによりフィラメントの節約とプリント時間および仕上げ時間の短縮が出来ました。
反面、デザイン性が若干犠牲になりました。
4. 『握りん君』デビューとレビュー
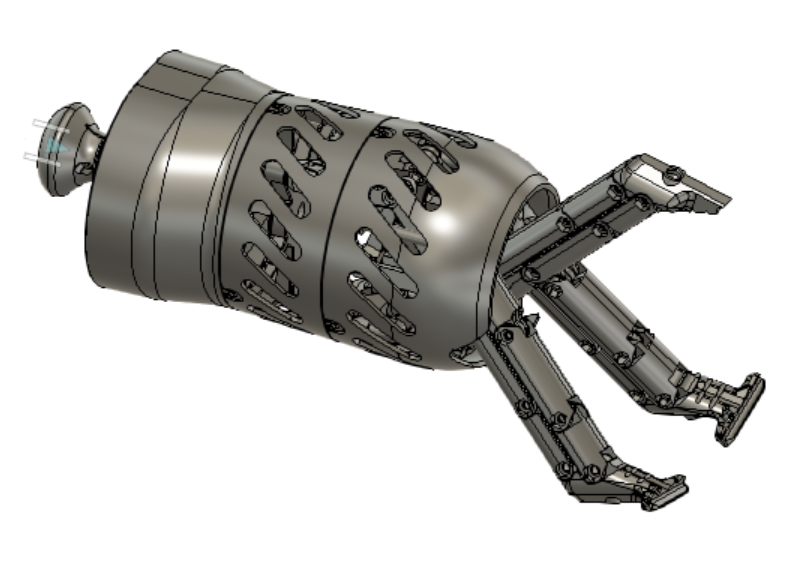
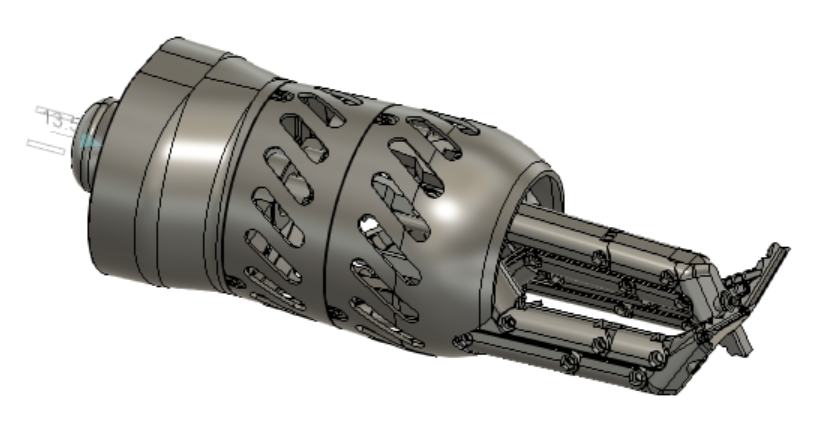
2018年8月、MakerFaire Tokyo 2018 で『握りん君』はデビューしました。
画像は『握りん君』が指を開いた状態と閉じた状態です。
4-1. 嬉しい誤算
想定したターゲットに感想を聞きたかったのですが、出会えませんでした。
来場していても、障害のある手を出して見せてはくれなかったでしょう。
しかし嬉しい誤算もありました。実演していると、特に幼児や小学生が興味を持って寄って来て、使って遊んでくれました。
画像は『握りん君』を取り合って遊ぶ兄弟(ご家族の許可を頂いて撮影した動画のショット)です。
4-2. 発見その1(子と親)
そうした子供達や親達を見て発見した事が多々ありました。
・幼児は実演したタスクを真似る傾向にあった。(並べる、集める、棚に置く)
・手が小さくてグリップが握れない幼児がいた。(手のサイズ)
その場合、手を添えて補助する親が複数いた。(共同作業による愛情感)
・年齢、性別にかかわらず直感的に使いこなす子が多くいた。(直感的な使い勝手)
・ロボットになった気分になって、はしゃぐ子が複数いた。(義体化による高揚感)
・幼児は実演したタスクを真似る傾向にあった。(並べる、集める、棚に置く)
・手が小さくてグリップが握れない幼児がいた。(手のサイズ)
その場合、手を添えて補助する親が複数いた。(共同作業による愛情感)
・年齢、性別にかかわらず直感的に使いこなす子が多くいた。(直感的な使い勝手)
・ロボットになった気分になって、はしゃぐ子が複数いた。(義体化による高揚感)
4-3. 発見その2(障がい者)
先天的な障がいを持った人が車椅子で寄って来て積極的に使おうと協力してくださいました。
・しかし手や指が本人の意図した通りに動かせず、グリップを握れなかった。
・随伴者の方から障がい者のリハビリツールとしての可能性をご提案いただいた。
会場でファブラボ品川ディレクターの林園子氏にアドバイスを伺ったところ、リハビリツール仕様への改良点をご指摘を頂き、リハビリのモチベーション向上に寄与する可能性も示唆して頂きました。
・しかし手や指が本人の意図した通りに動かせず、グリップを握れなかった。
・随伴者の方から障がい者のリハビリツールとしての可能性をご提案いただいた。
会場でファブラボ品川ディレクターの林園子氏にアドバイスを伺ったところ、リハビリツール仕様への改良点をご指摘を頂き、リハビリのモチベーション向上に寄与する可能性も示唆して頂きました。
5. 『握りん君 Jr』着想と設計
MakerFaire での発見を踏まえ、幼い子供向けに『握りん君』を改良して Fab 3D Contest に応募する事にしました。
ターゲットは子供とその親とし、作品名は『握りん君 Jr』としました。
また、将来リハビリツール仕様に改良できる工夫を折り込む事にしました。
ターゲットは子供とその親とし、作品名は『握りん君 Jr』としました。
また、将来リハビリツール仕様に改良できる工夫を折り込む事にしました。
5-1. 改良その1(幼児)
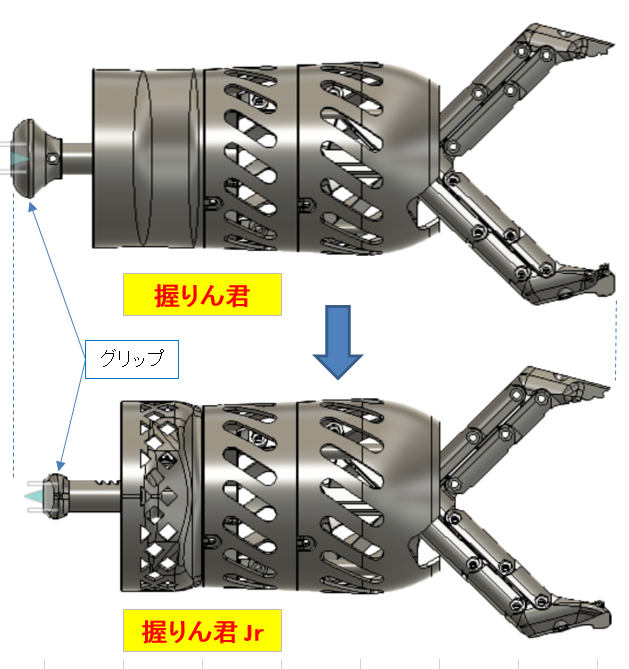
幼児の手のサイズを考慮してグリップを小型化し、握りやすく改良しました。
また全長を短縮し軽量穴を増やして軽量化しました。
画像は改良前と改良後の比較です。
5-2. 改良その2(障がい者)
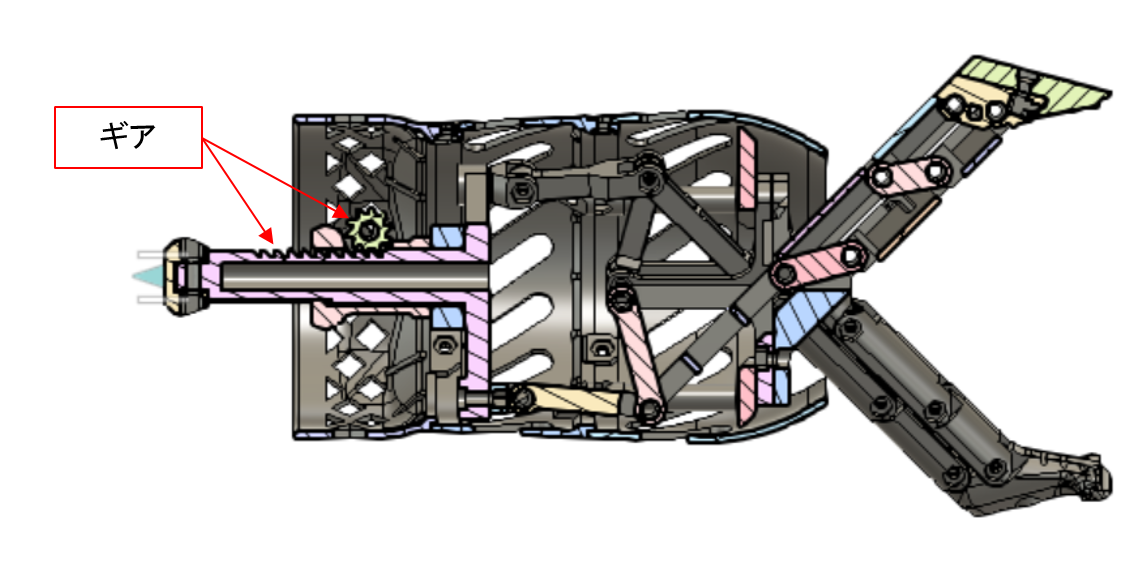
ギア機構を追加しました。
これによりグリップが握れない障がい者に配慮したリハビリツールとして、モーター駆動式に改良する事が容易となりました。
これによりグリップが握れない障がい者に配慮したリハビリツールとして、モーター駆動式に改良する事が容易となりました。
画像は『握りん君 Jr』の断面図です。
5-3. 余談(他の用途)
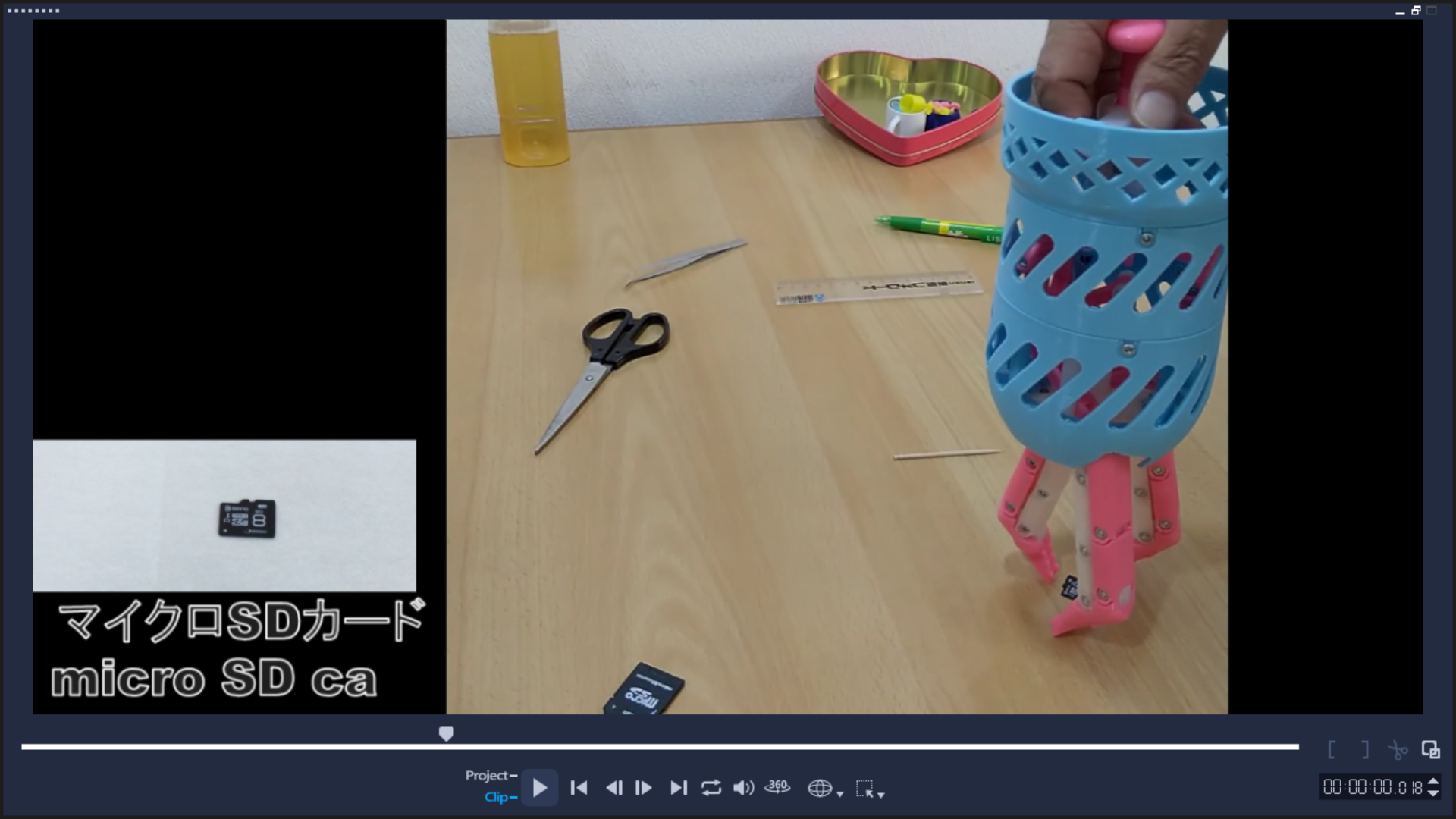
MakerFaire でクレーンゲームのピッキングハンドをイメージして寄って来た人がいました。
モーター駆動式ならそうした用途も可、何しろマイクロSDカードだって掴めますから。6. 『握りん君 Jr』デビューとレシピ
2018年10月、 Youtube に『遊びながらお片付けできる?グローブ 握りん君 Jr』と言うタイトルでアップロードました。※④
同時にthingiverse に『NigiLinking_Jr』と言う名称で3Dプリント用データをアップロードしました。※⑤
尚、動画作成には Corel VideoStudio 2018 を使用しました。
【余談】
動画作成は2年ぶりだったので、使い方思い出したり新機能を試したりしている内に広告風になってしまいました。
6-1. データのダウンロード
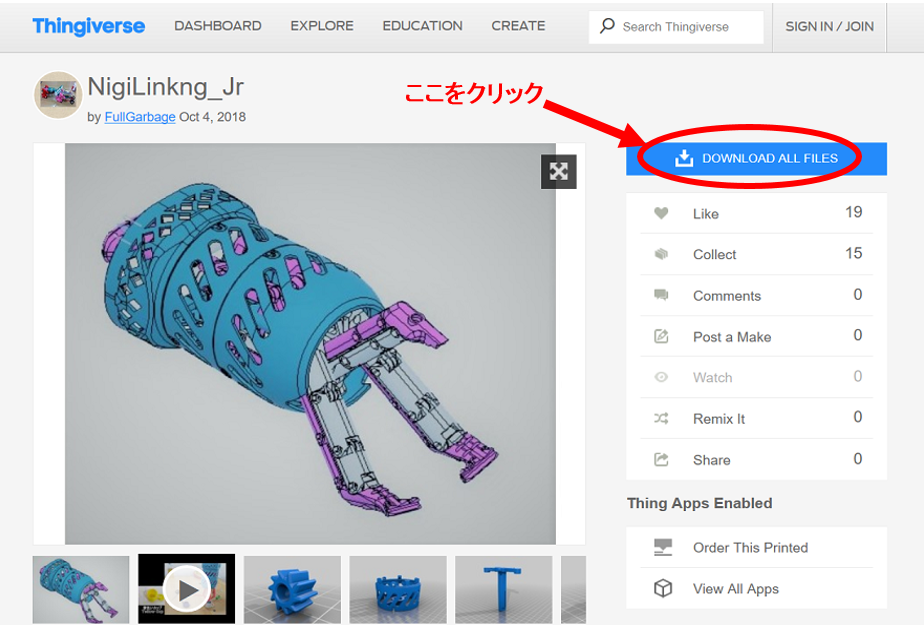
thingiverse ※⑤ のリンクを開き、右上の青い釦"DAWNLOAD ALL FILES" をクリックする事で、NigiLinkng_Jr.zipファイルをダウンロードできます。
これを解凍する事で全ての3Dプリント用データ(STL形式)を取得できます。
【※お断り】
fabbleの制限により全ての3Dデータを添付する事ができませんでした。(全て添付しようとすると Error が出る)
お手数ですが上の手順でデータを取得してください。
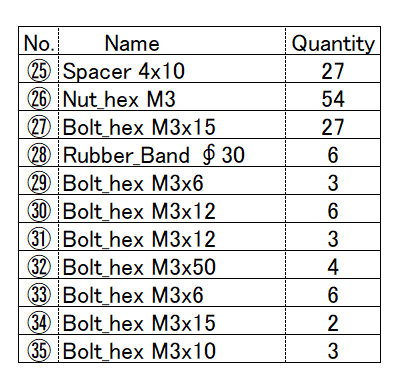
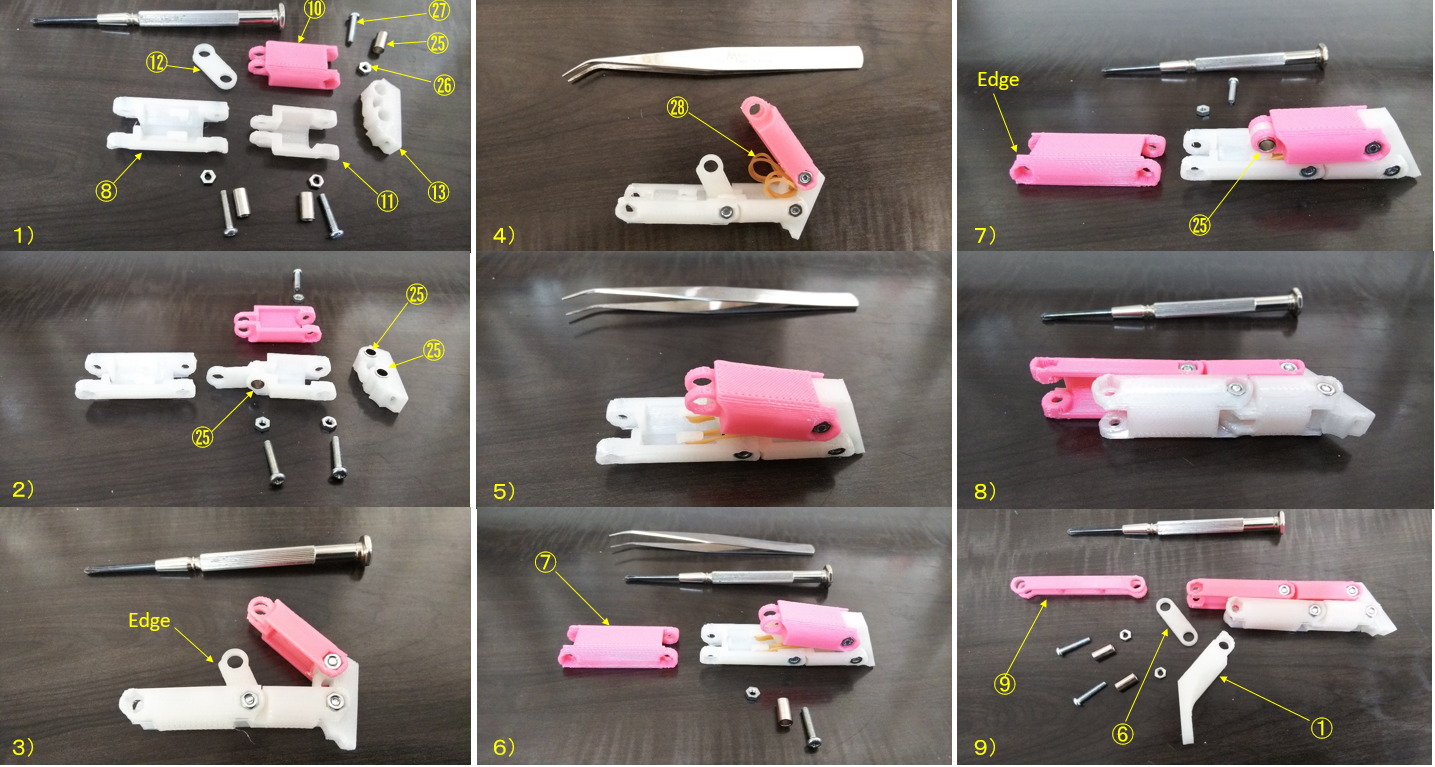
6-2. パーツリスト
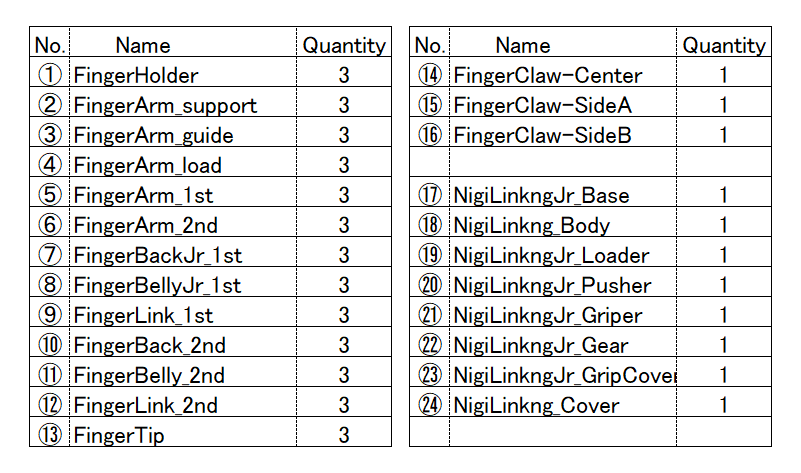
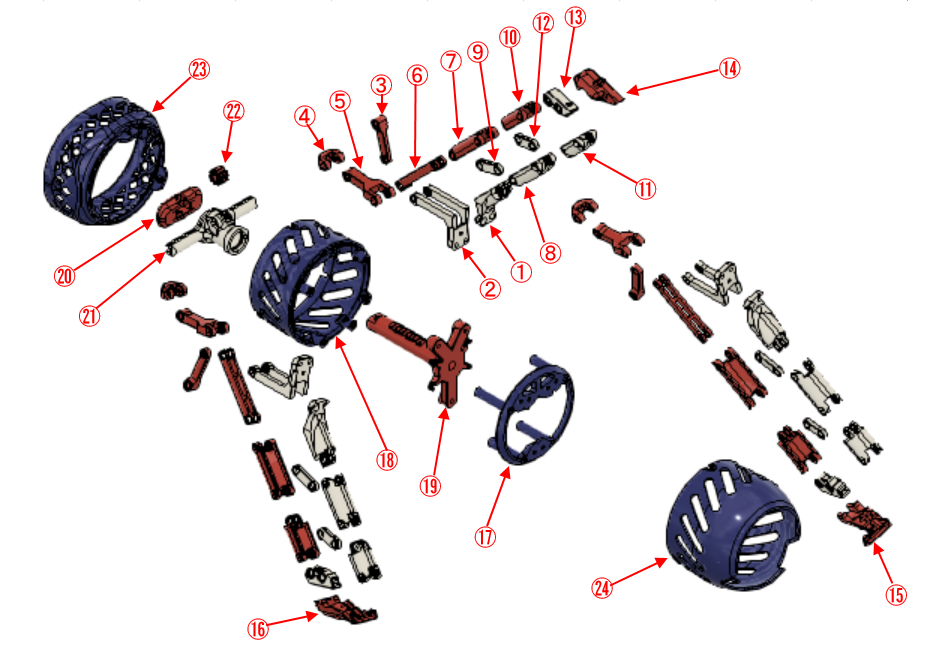
指(①~⑬)は3本、部品共通です。(データは1本分)
画像はパーツリストとその配置図です。
【推奨事項】
3-6.で述べた通り部品は全てサポート無しでプリントできる様に設計してあります。
サポート無しでプリントできる方向にモデルを回転させてからプリントする事をお勧めします。


7. 最後に
『握りん君 Jr』は
親と子が協調して有用なタスクを完了させる為の、ひとつの提案です。
MakerFaire で幼いお子様が実演したタスクを真似る傾向にあった事から思い付きました。
玩具をただ与えるだけでなく、親が有用なタスク(ここではお片付け)をやって見せる事で子供が真似してくれるのではないか?との発想です。
上手く行けば後はそれを如何に持続してもらうか、動画では安易な提案(おやつ)になりましたが、如何でしょうか?
7-1. 謝辞
『握りん君』着想、製作および MakerFaire 出展にあたり、ファブラボ鎌倉ならびに朝ファブ参加者の方々の協力と助言を頂きました。
また『握りん君 Jr』着想は、MakerFaire ブースの方々の協力ならびに立ち寄ってくださった方々の反応とご意見、更にはファブラボ品川の林様のアドバイスなど数知れない方々の支援の賜物です。
最後に『握りん君 Jr』が着想のまま終わらず、製作と Youtube および thingiverse への公開の動機付けとなった、この Fab 3D Contest に感謝致します。