事前ワーク① デザインワーク編
最終的に3Dプリンタで出力し、組み立てるにはCAD上でのモデリングが必要になります。 しかし、CADだけでデザインをしていくのは少々厳しい物があります。 そこで、あらかじめスケッチや図面を描いておくことで、ロボの形状を自己把握することができ、円滑なモデリングが可能となります。この工程を紹介します。 ※この事前ワーク①は、11月14日のイベントに参加する場合、事前に必ず行ってください。
事前ワーク① デザインワークを始める前に コースの選択
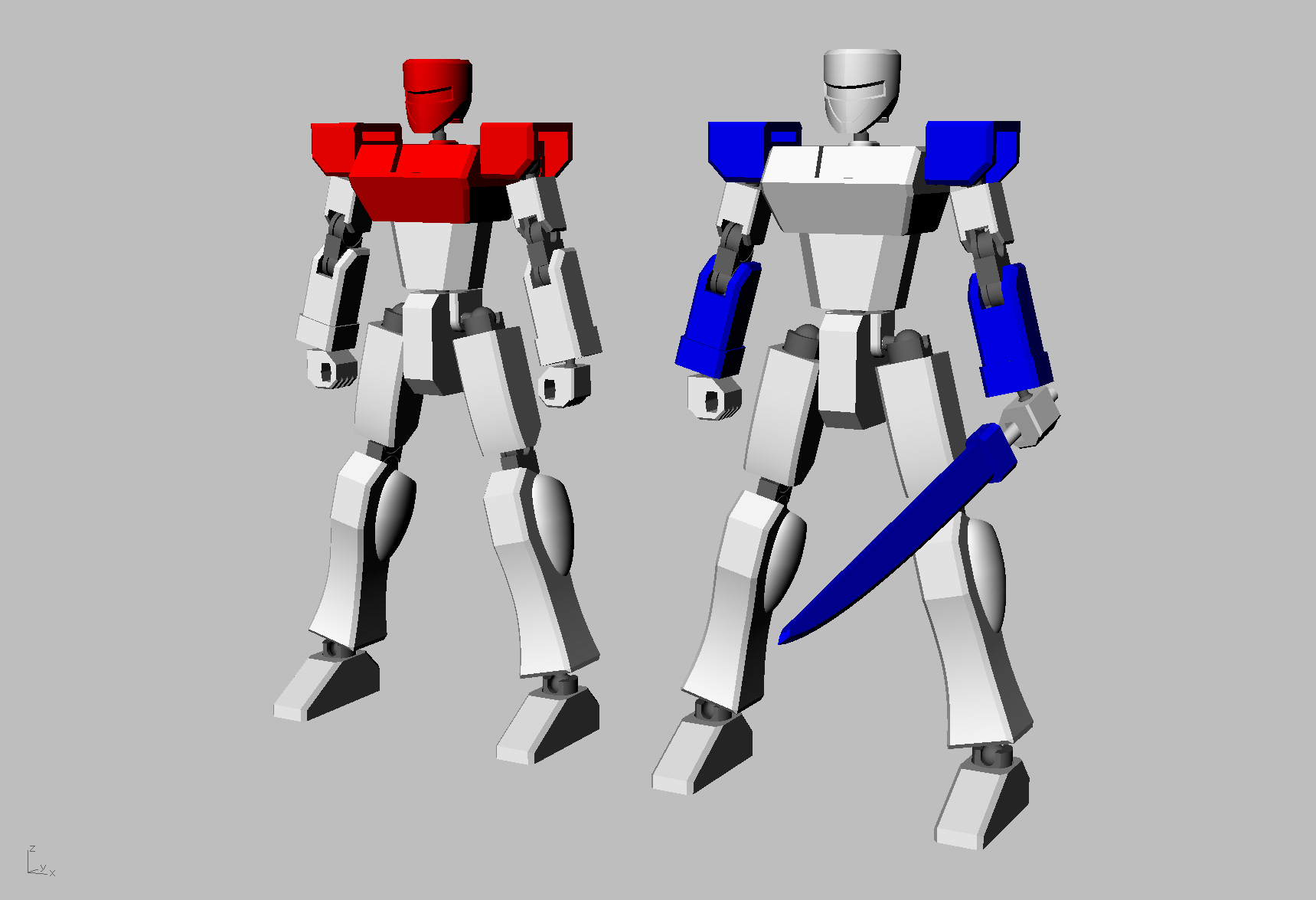
オリジナルのロボットを出力すると言うからには、皆さんにロボットの全身を出力していただきたい・・・のですが、時間やコストの関係で、今回のイベントでは部位を限らせていただきます。Aコースでは頭・胸部・肩(赤い表示の部分)、Bコースでは肩・腕・武器(青い表示の部分+α)をデザイン・出力する形になりますので、いずれかを選択して作業・モデリングを進めてください。(白い部位の出力は時間の都合上、行いません)
事前ワーク① デザインワーク編(1)スケッチ
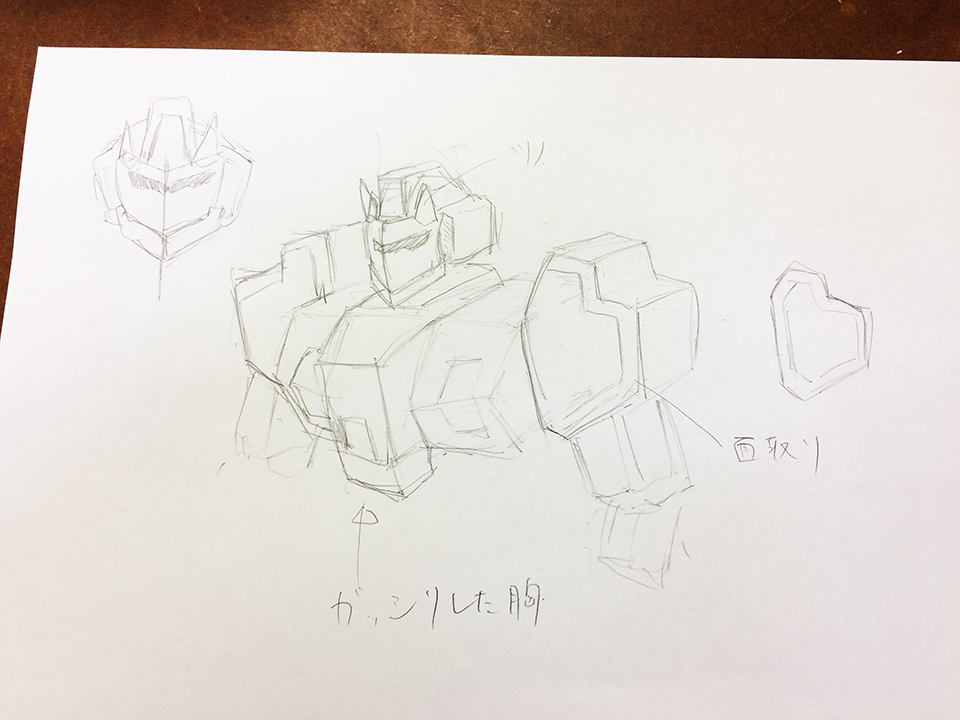
どんなものを出力したいか、想像力を働かせ、白紙にスケッチしましょう。 もちろん、自分の参加するコースで出力する部位を描いてください。 上手下手は関係ありません。自分でどんな形か、把握できる程度であれば結構です。 あまりにも大きすぎたり(出力時間がかかりすぎる)、小さすぎたり(ジョイントが入らない)しないよう注意してください。細かすぎるディテールも出力できないので 避けるようにしましょう。
事前ワーク① デザインワーク編(2)図面の作成
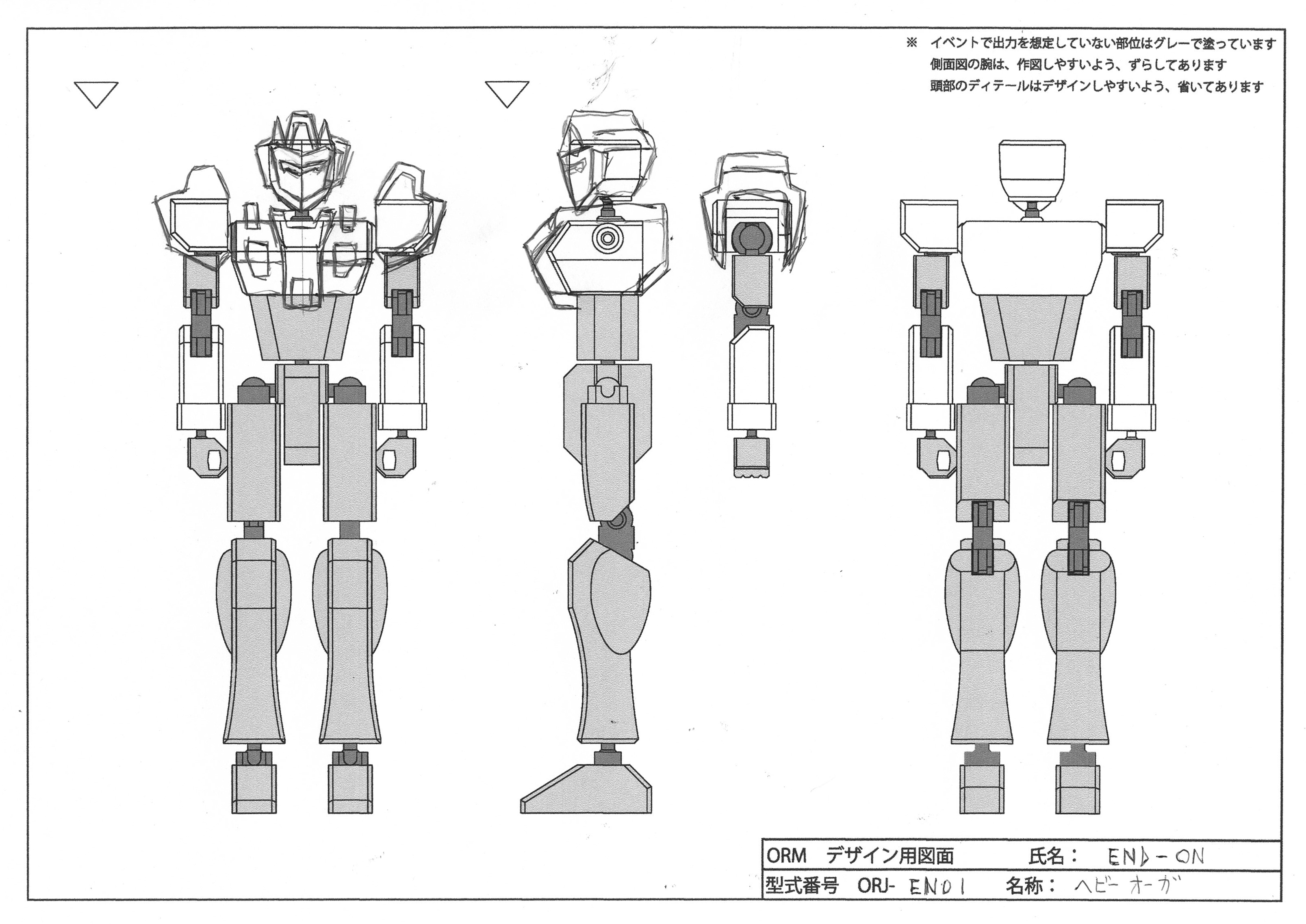
次に、スケッチをもとに図面を作成します。下から専用の図面をダウンロードし、 イラストレーションソフトで描いたり、プリントアウトしてペンや鉛筆で描きます。 この図面は正面・側面・背面ですが、すべてに描き込む必要はありません。 これも自分が形状を理解でき、Rhinocerosでモデリングする際に目安となる程度で構いません。 注意点 1黒い線ではっきり描くこと。 2着彩は行わず、白黒で描くこと。 ORMデザイン用図面(JPG) ORMデザイン用図面(PDF)
事前ワーク② モデリングワーク編
Rhinoceros上に完成した図面をビットマップ(配置)してモデリングしましょう。 ここではその手順を紹介します。 ※この事前ワーク②は必須ではありませんが,イベント時間内に行っていただきます。時間がかかりすぎると出力(3Dプリント)する時間が無くなってしまうので、事前に行ってくることを推奨します。(非Rhinocerosユーザーは不要) モデリングはユーザーの技術に大きく依存します。モデリングが厳しいようでしたら、ロボのデザインをシンプルなものに変更することをおすすめします。
事前ワーク② モデリングワーク編 専用データのダウンロード
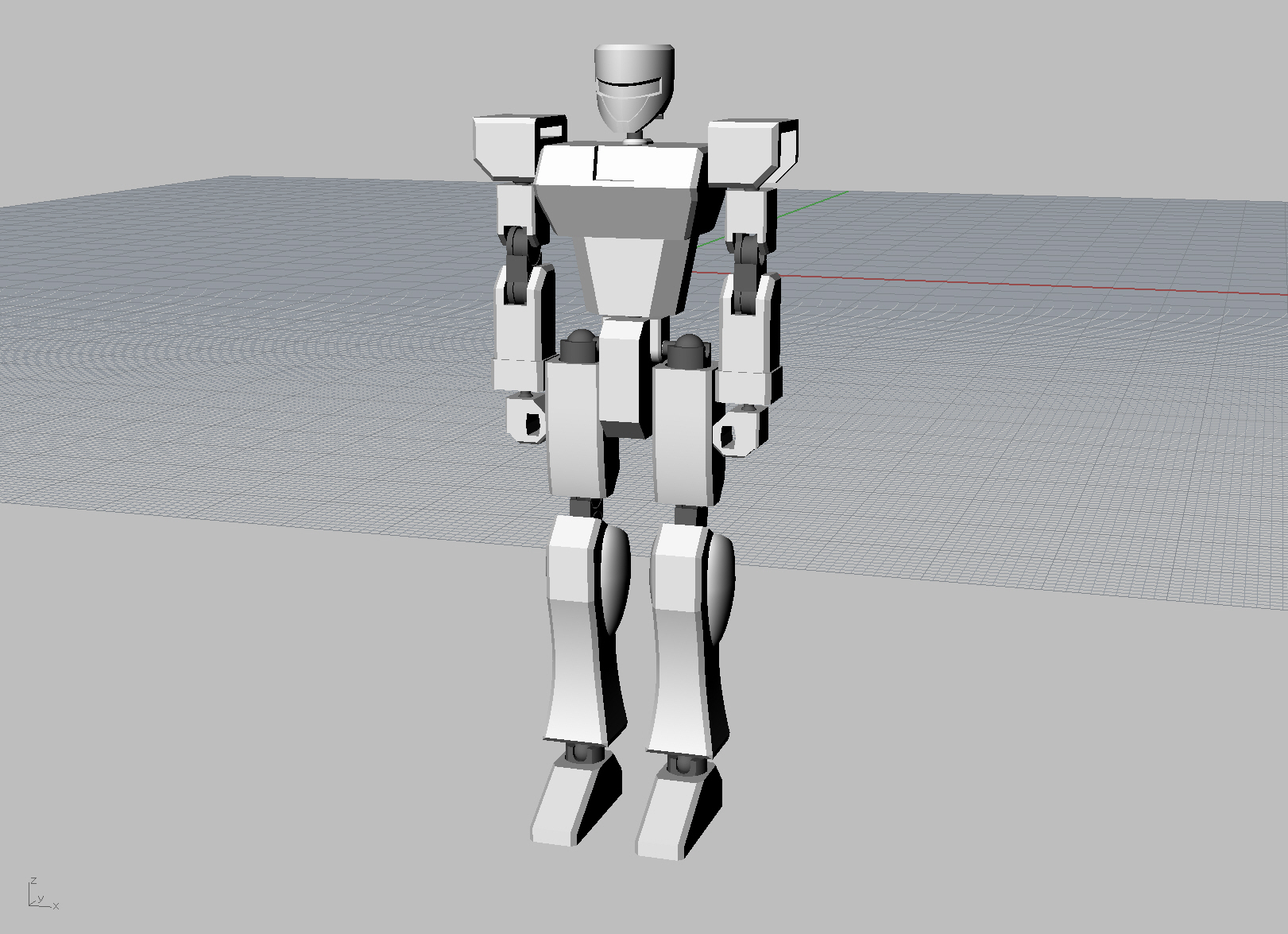
さっそくモデリングを開始するのですが、目安となるものがなければ難しいでしょう。 そこで、こちらのリンク先 より、パスワード(z6nwgee9)を入力していただき、専用ライノセラスデータをダウンロード・開いてみてください。このデータには、すでに素体となるロボットの形やジョイント形状がモデリングされてます。このデータにモデリングを加えてデータを作成します。
事前ワーク② モデリングワーク編 専用データの解説
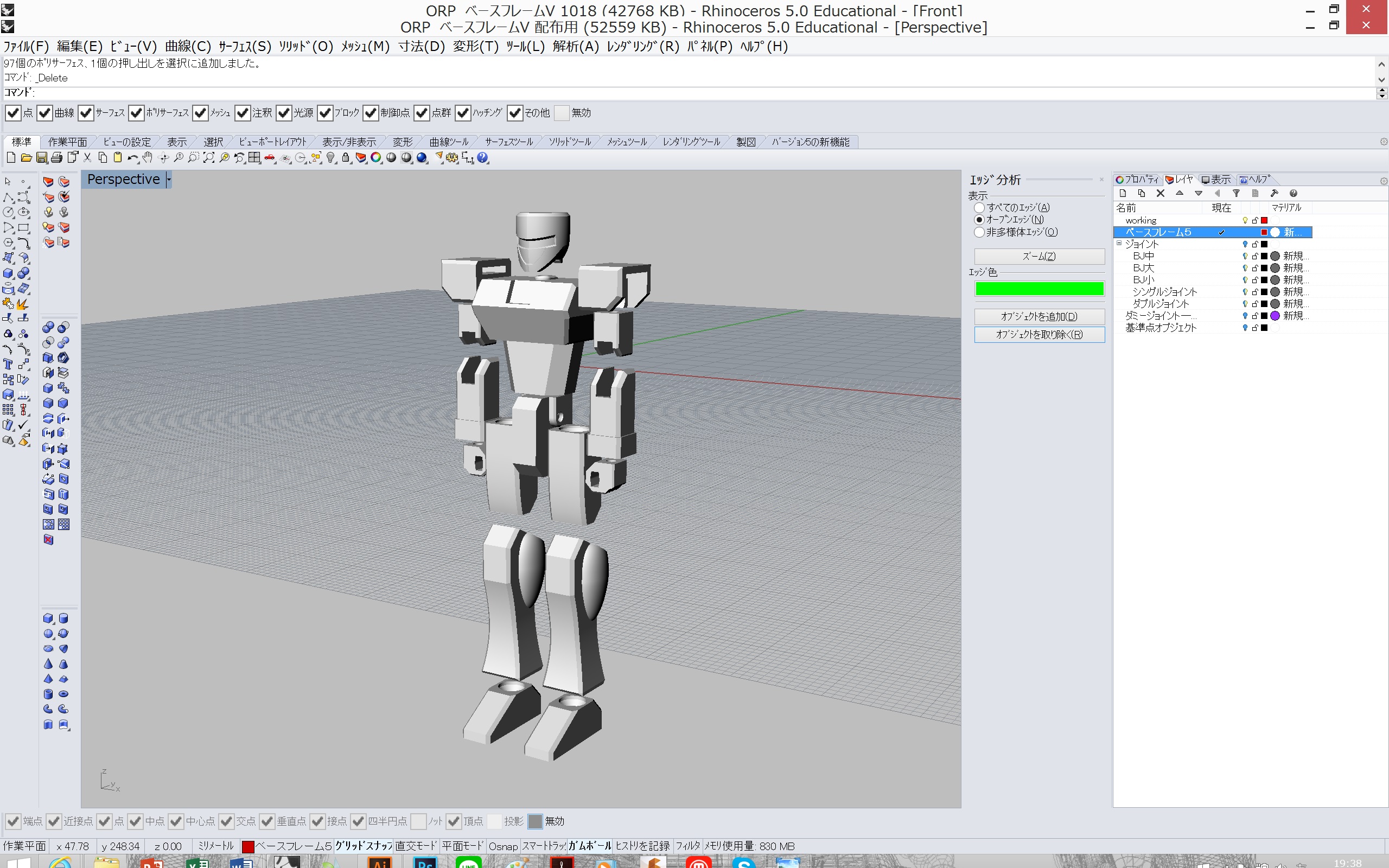
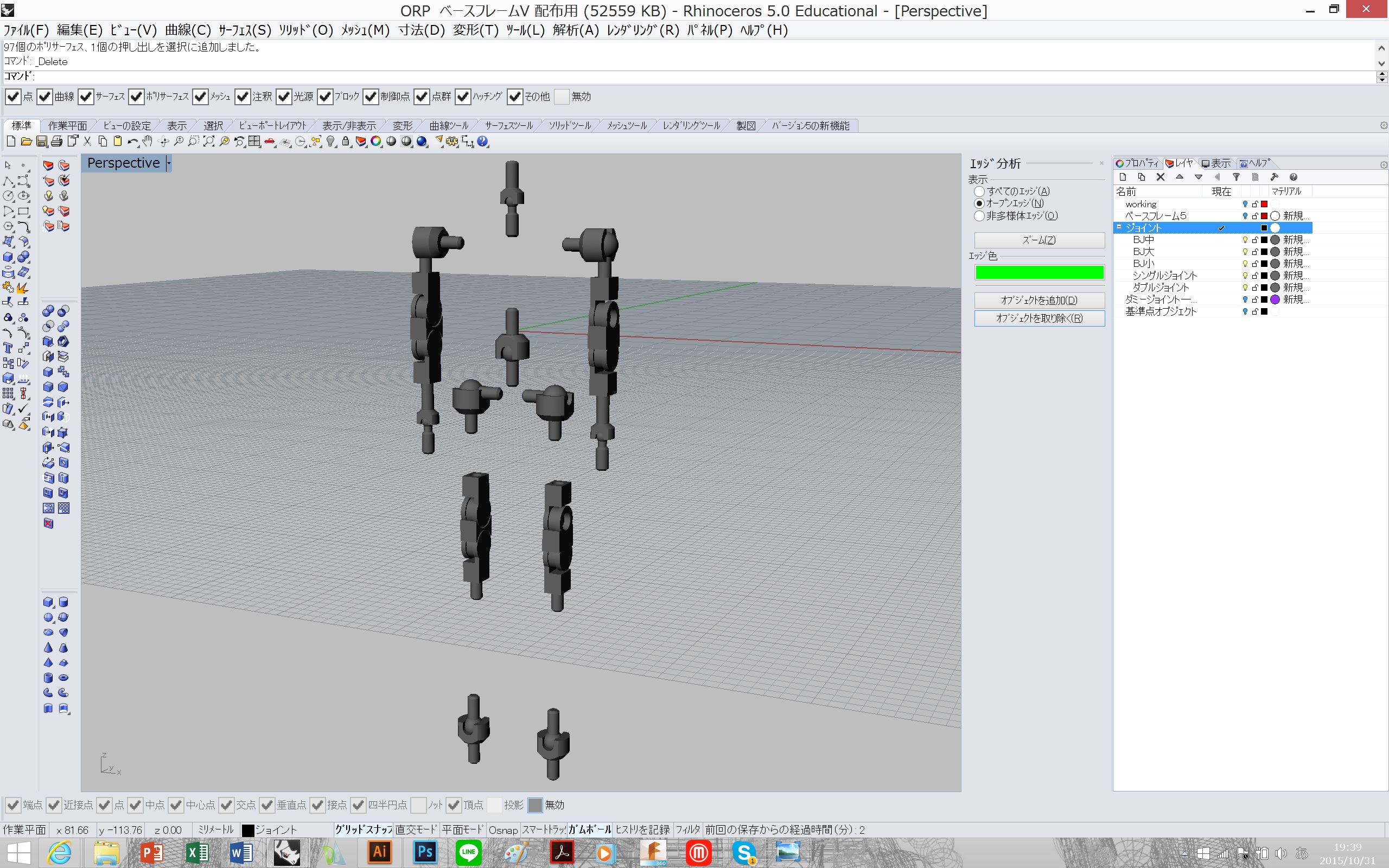
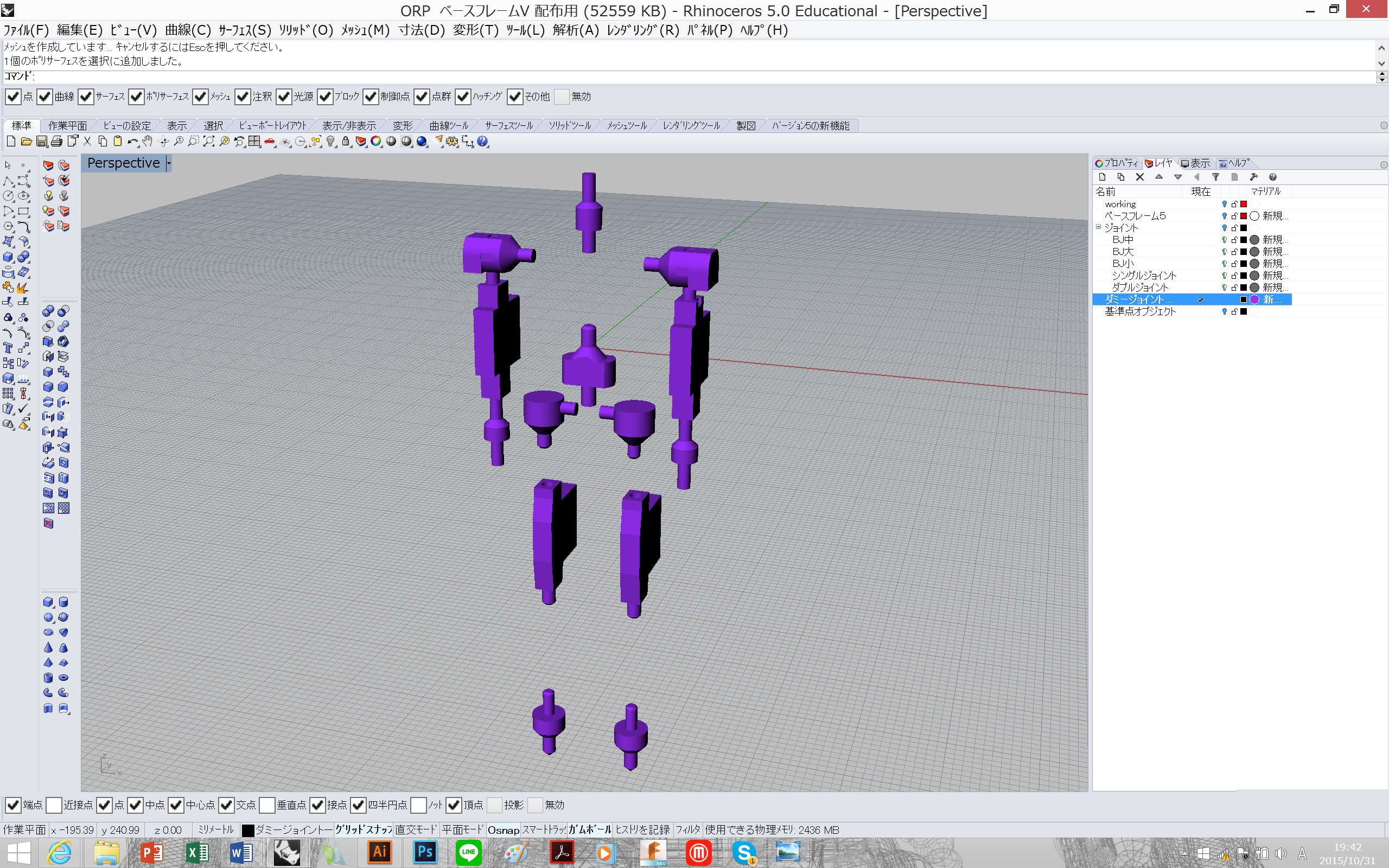
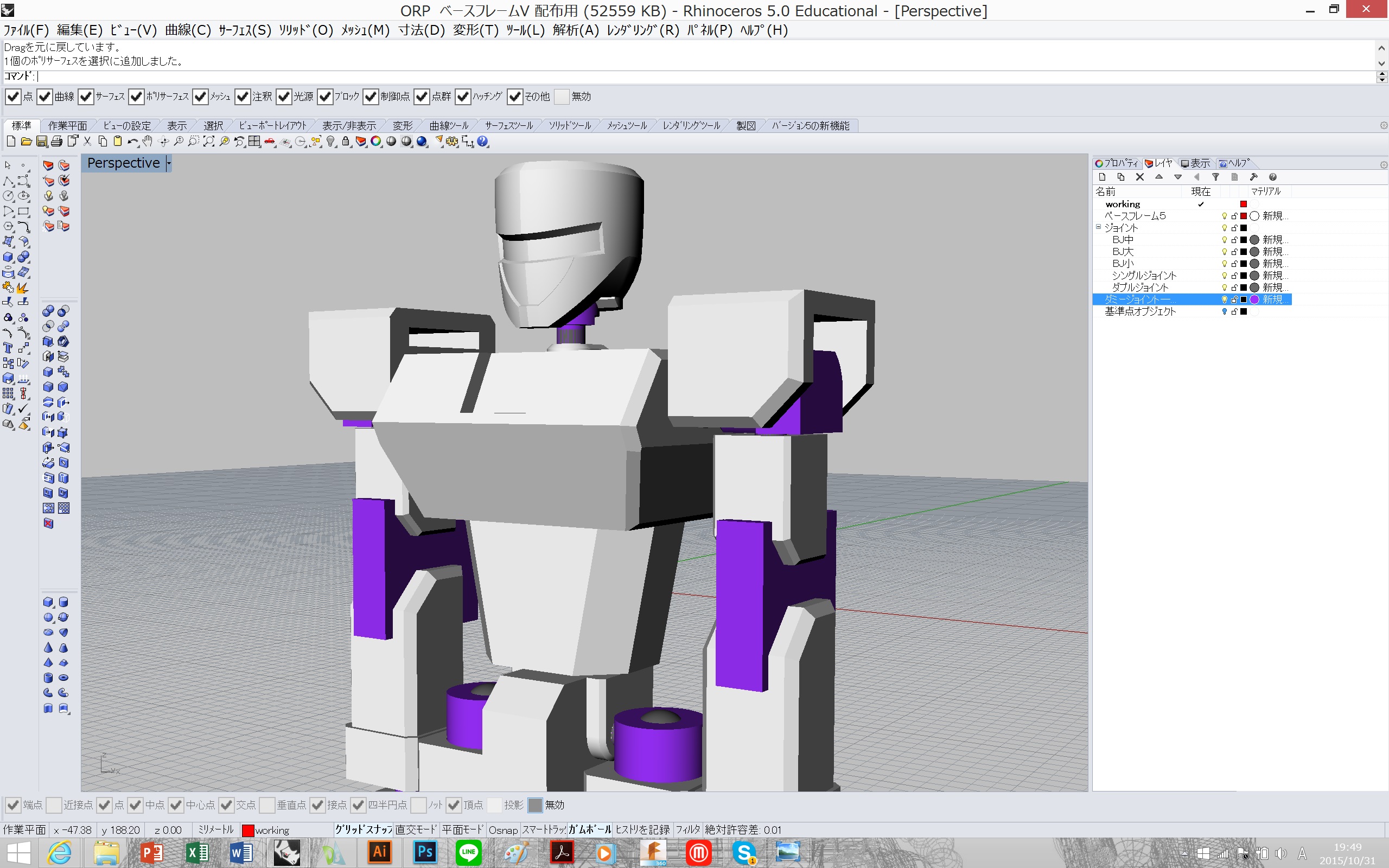
専用データにはいくつかのレイヤが存在し、それぞれにオブジェクトが存在します。 ここでは重要なもののいくつかを紹介します。 まず、「ベースフレーム5」は、イベント当日に皆さんにお渡しする「素体」のモデルが存在します。イベントでは、この素体のいくつかのパーツを皆さんがデザイン・出力したパーツと交換するという形でオリジナルのロボットを制作していただきます。 次に「ジョイント」というレイヤですが、これは市販されている関節パーツを簡略的にモデリングしたものです。全身にどのように配されているか、ご確認ください。 最後に「ダミージョイント―0.2」というレイヤです。実はこれが最も重要ですので、次で詳しく解説します。
事前ワーク② モデリングワーク編 「ダミージョイント―0.2」解説1
オリジナルのロボットパーツに関節を埋め込むためにはその形状に合わせてモデリングしなければなりません。しかし、3D出力する際の誤差や、動くようにするためのクリアランスを確保しなくてはいけません。「ダミージョイント―0.2」のオブジェクト群は、それらを解決するためのオブジェクトです。実際は、モデリングしたロボットのパーツからダミージョイントのオブジェクトをブール差演算して、関節パーツのはまる穴と可動のクリアランスを確保します。この作業はイベント当日に詳しく解説しながら行いますので、現段階では行わず、知識として頭に置いておいてもらえれば結構です。
事前ワーク② モデリングワーク編 ビットマップの方法1
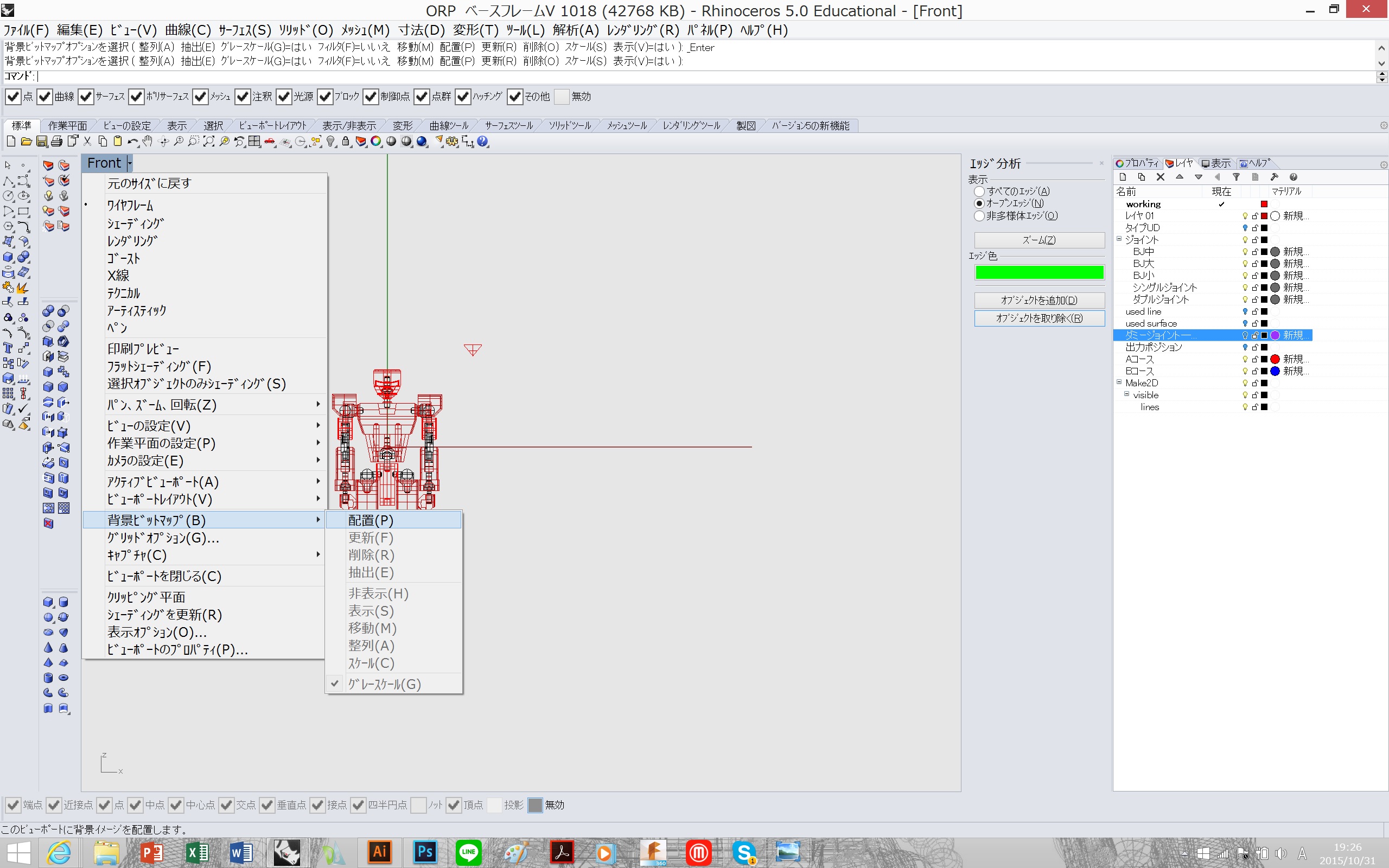
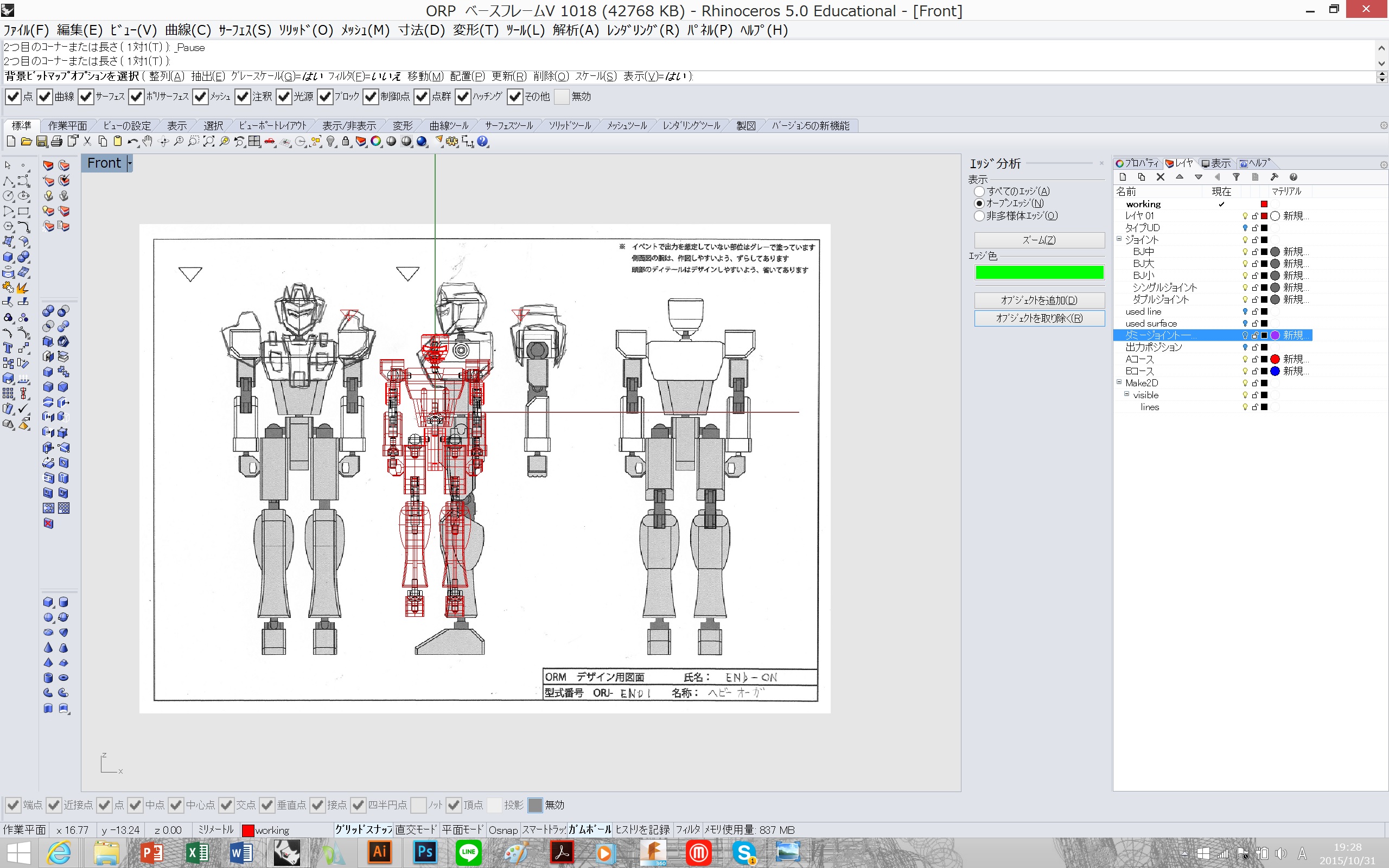
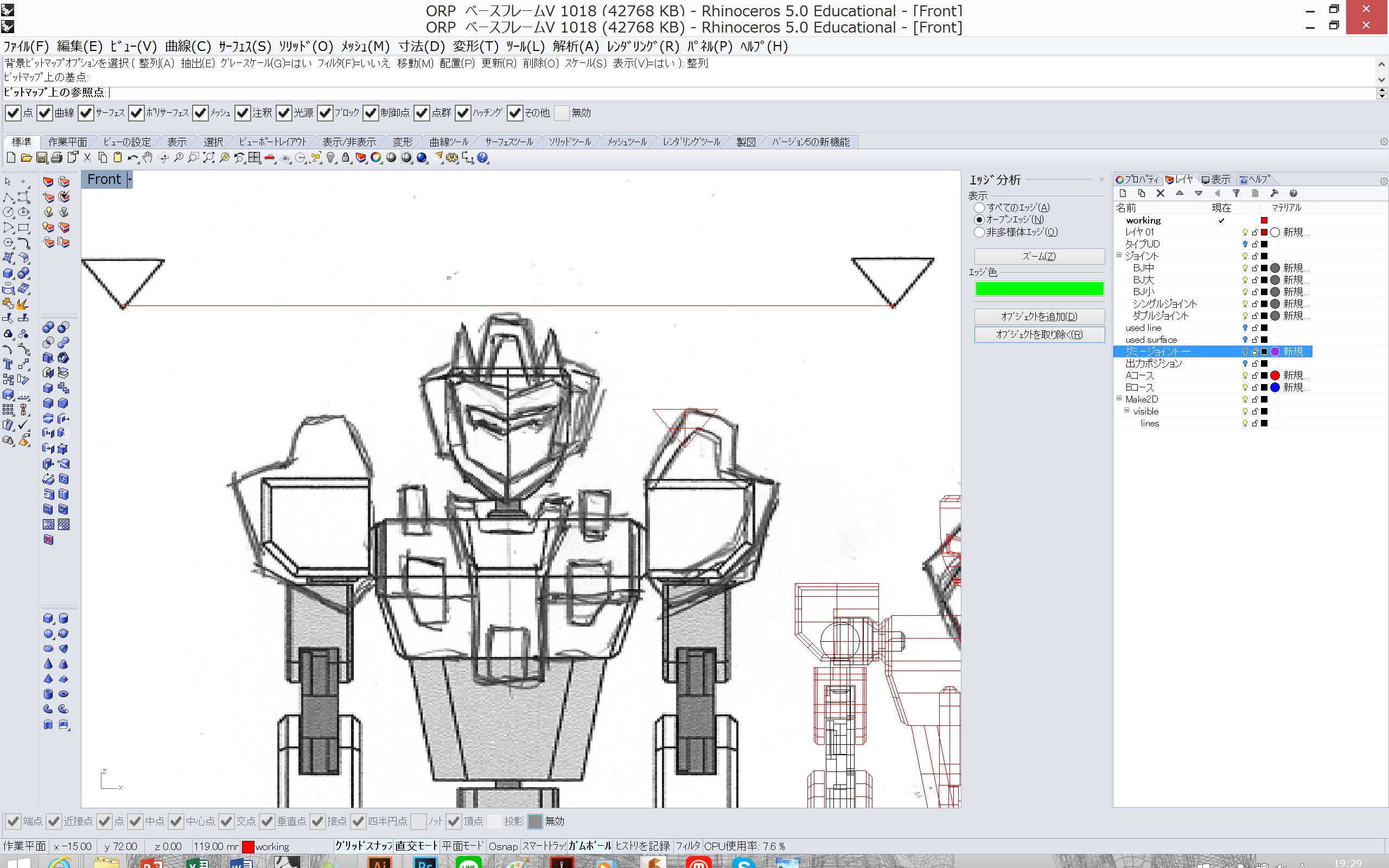
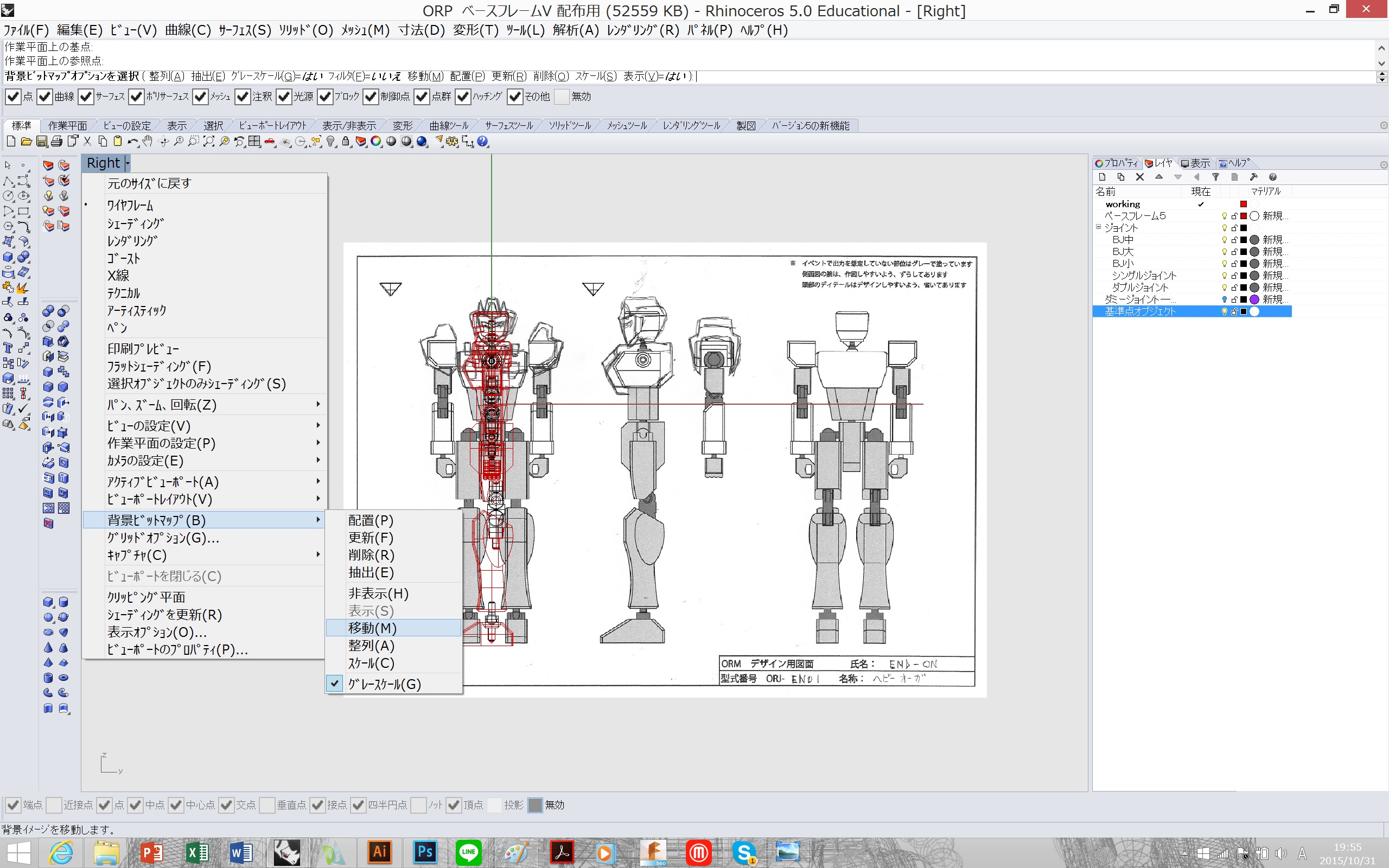
事前ワーク①で描いた図面をビットマップ(投影)します。まず図面をスキャンし、JPGもしくはPNGデータで保存します。(傾いている場合は編集ソフトなどで修正してください。)次に開いた専用データ上で、ビューの左上にあるビュー名(画像ではFRONT)の右の▼から、「背景ビットマップ」→「配置」とすすみ、スキャンした図面を選択、作業平面上に配置します。そうしたらまた▼から「背景ビットマップ」で今度は「整列」を選択します。ビットマップした図面の上にある2つの▽の頂点を基点・参照点としてクリックした後、ビュー上の下三角錐の頂点をこれも基点・参照点としてクリックします。これでスケールはそろいました。
事前ワーク② モデリングワーク編 ビットマップの方法2
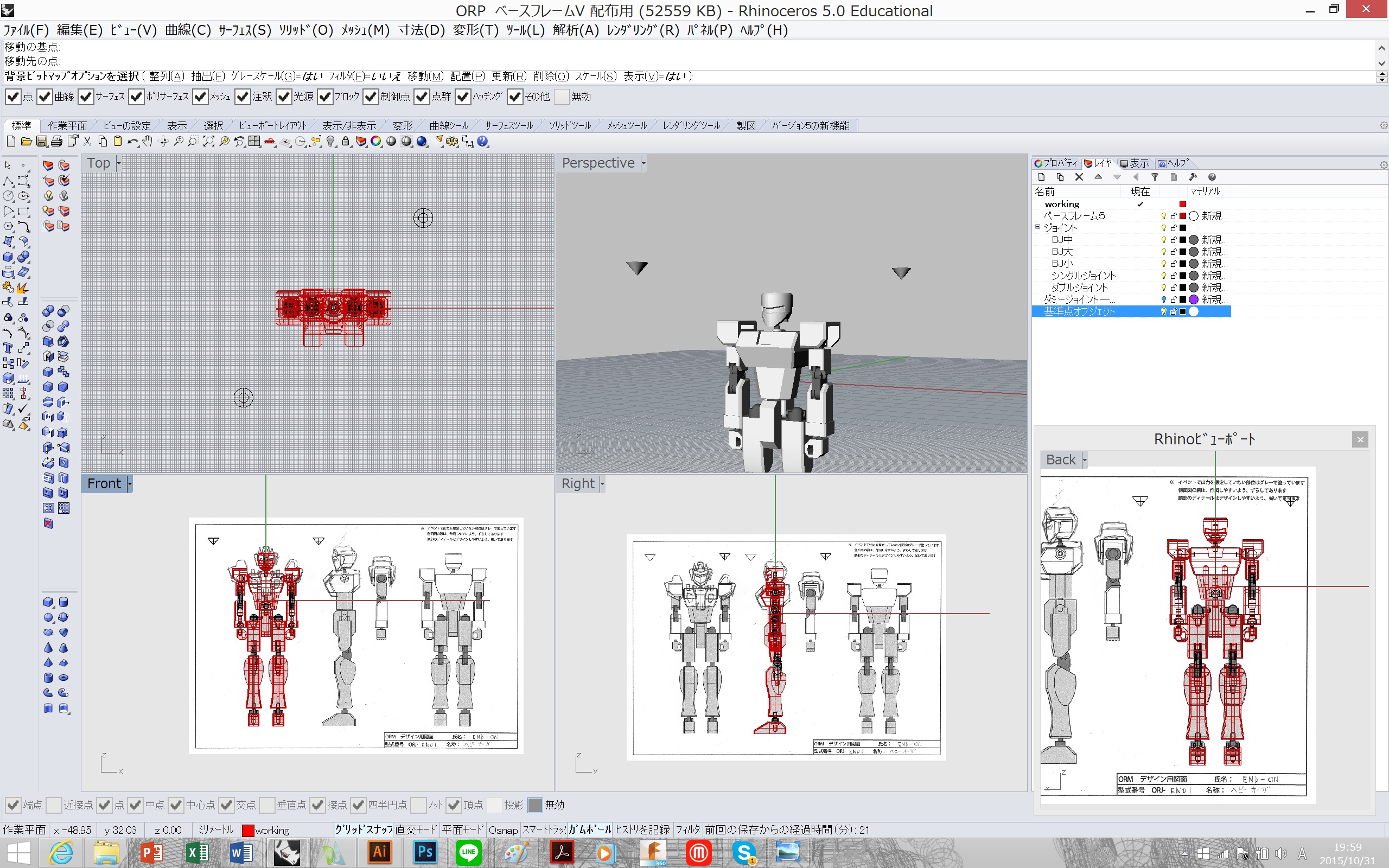
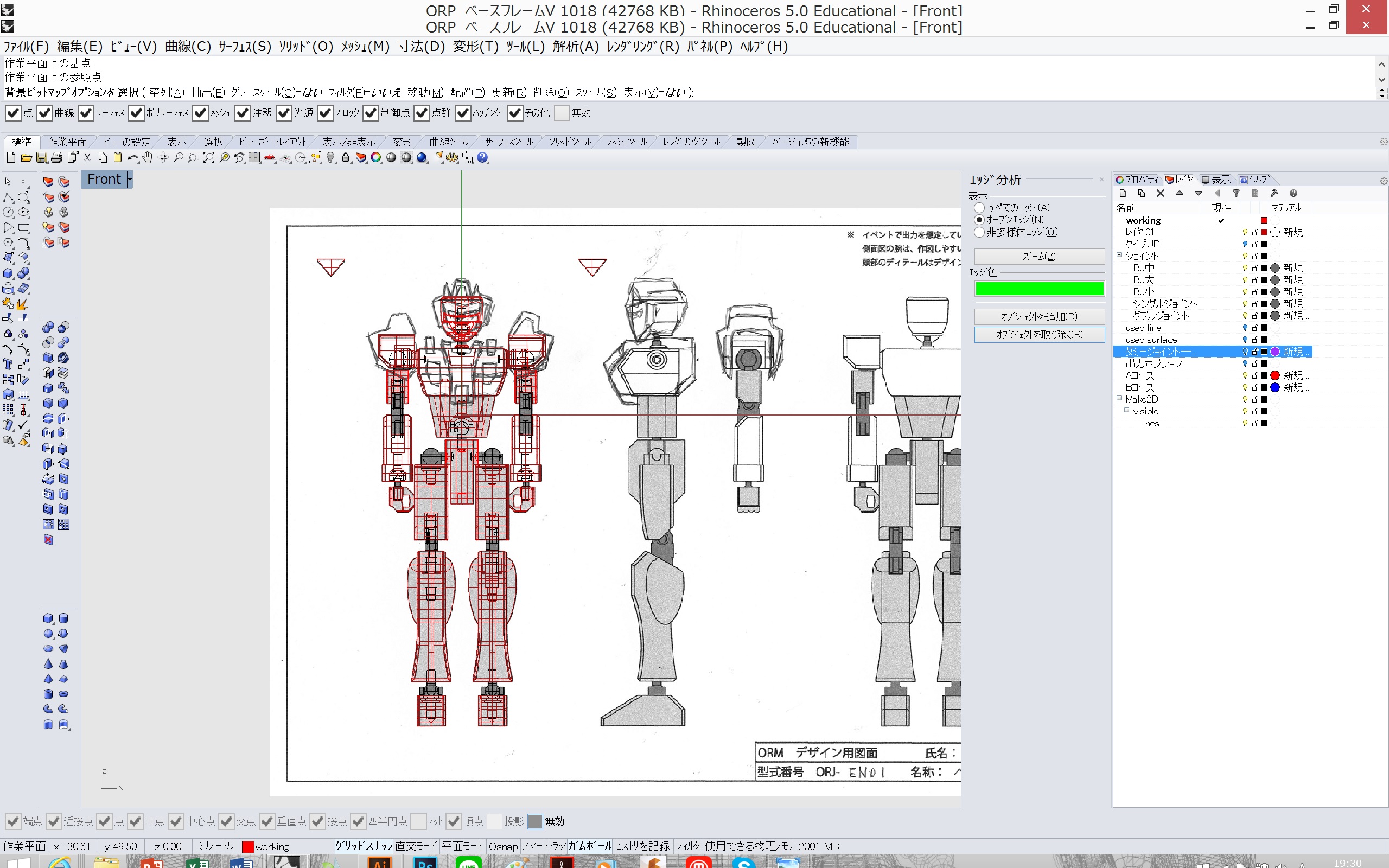
次に▼からまた「背景ビットマップ」と進み、「移動」を選択します。ビットマップしたビューに合わせて、FRONTビューなら正面図の中心を0に、といったように合わせます。 これらの作業をFRONT、RIGHT、BACKと行います。(BACKのビューは新規ビューから開き、右下に配置しておくと便利です。)
事前ワーク② モデリングワーク編 モデリング
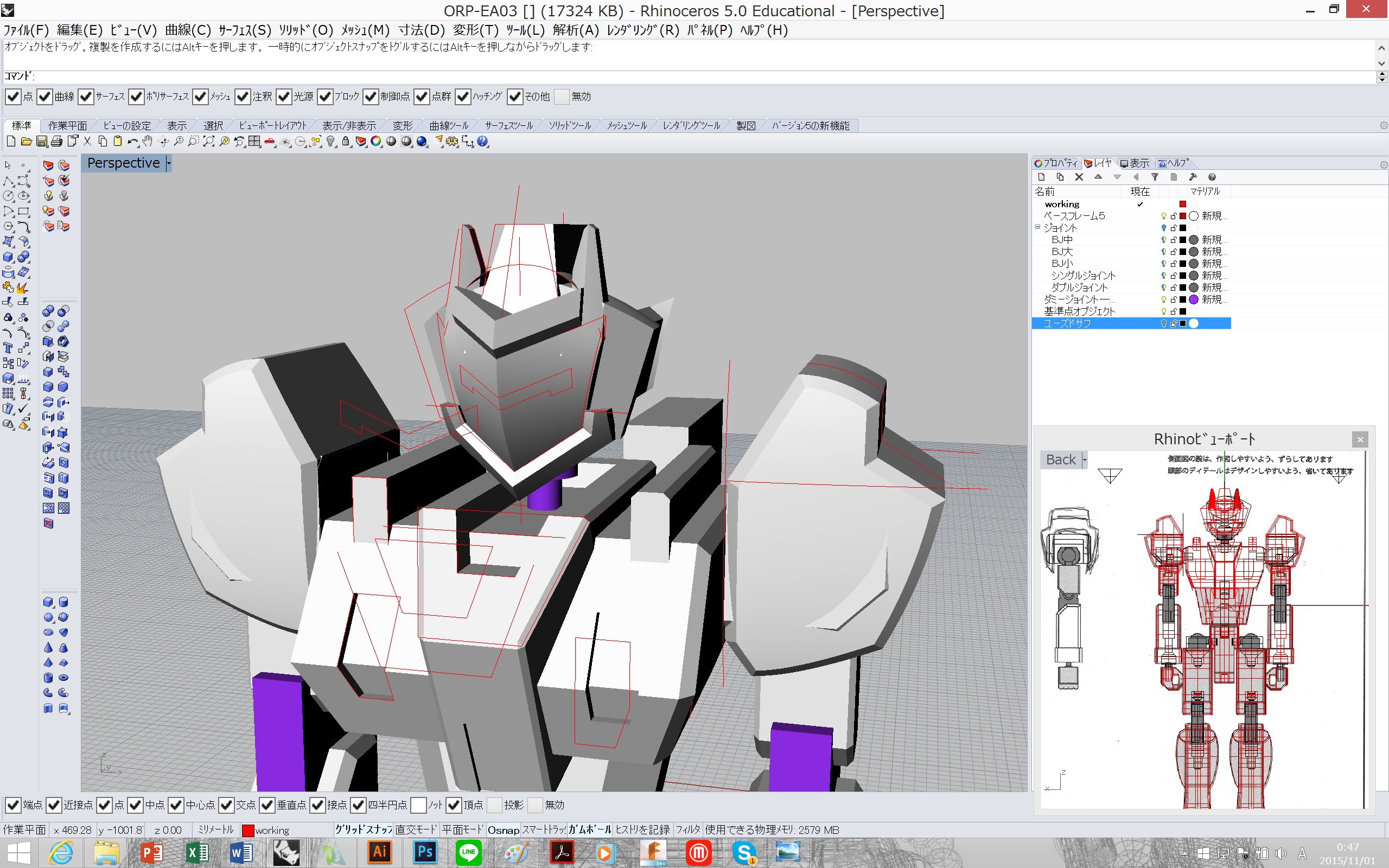
図面のビットマップが完了したら、早速モデリングに入りましょう。背景に映し出された図面を参考に、各部位を自分の技術に応じた方法でモデリングしていきます。 上でも書きましたが、大きすぎたり、関節パーツが入らないほど小さい物にしないでください。以下はそれぞれの部位のモデリングのコツを解説します。
モデリングのコツ・・・頭部(Aコース対象)
頭部はロボットの命、といっても過言ではありません。一番こだわりたくなる部分でもあると思います。しかし、あまりにもディテールを詰め込みすぎると出力できなかったり、出力できたとしてもディテールがはっきりしないものになってしまいます。今回のイベントでは出力時間も限られていますので、なるべく1回で出力できるよう、極力シンプルなデザインにすることをおすすめします。イベント開催後でノウハウを蓄積できたら精密な頭部を出力してみるのもいいかもしれません。
モデリングのコツ・・・胸部(Aコース対象)
ロボットの中心となる胴体のパーツですが、今回のイベントでは腹部をそのままにして、胸部だけをデザイン・出力します。コツとしては出力する方向を考え、鋭すぎるエッジは避けるようにします。背面はシンプルにし、背面から正面にかけて出力っできるようにするとよいでしょう。背面にもこだわりたいのであれば、前後で分割して出力し、その後貼り合わせるといった方法もあります。イベント当日、ご相談ください。
モデリングのコツ・・・肩(両コース対象)
肩はロボットのシルエットを大きく決める重要な部位です。しかし、形状によっては腕の可動を殺してしまい、かっこいいポーズが取れなくなってしまいます。 コツとしては、前後にしっかりとボリュームをとる、横方向に腕を上げるための空間を開けることです。
モデリングのコツ・・・腕(Bコース対象)
腕もロボットの印象を決定する重要なパーツです。ここには関節パーツが上から下まで貫通していて、あまり細くすることはできません。逆に太くしすぎても腕を曲げることができなくなりますので、注意してください。これらさえ守れば比較的自由の利く部位です。 腕を延長するもよし、武器と一体化したものにしてもよしです。
モデリングのコツ・・・武器などの持ち物(Bコース対象)
やはりカッコイイロボットにはカッコイイ武器が欠かせません。今回出力するロボットの手の部分には3mmの穴が開いています。つまり、武器の柄部分は3mmの棒状である必要があります。しかし、3Dプリンターの特性上、細い物を均一に高く出力することは難しいです。そこで、市販の3mmプラ棒を出力した武器に差し込み、柄とします。 武器のデザイン・モデリングをする際は、3mmの棒がささるように開口してください。 それ以外は自由にデザインできると思われるので、様々な武器や持ち物に期待します。 ネタに走るも大歓迎です。