About the need knower
Mr. Vivek Kumar, our need-knower, lost his middle finger, index finger, and the distal part of his thumb due to a traumatic amputation. He is determined to stay independent in daily activities and, most importantly, regain the ability to write with his dominant hand to continue his education.
Basic Information about Vivek
Name : Vivek Kumar
Age : 23 years old
Dominant hand : Right
Language : Tamil
Type of injury : Right hand injury
Type of need : self-care device
Background
Vivek studied at Rathnapura. Currently educated upto NVQ level 6. Vivek likes to be an IT teacher.
He had to temporarily take a break from his studies due to his injury. Currently self-employed
Strengths
- Appropriate muscle power and adequate range of motion in the interphalangeal joints in the 4th and 5th digits.
- The carpometacarpal joint and metacarpophalangeal joints of the thumb are intact with appropriate muscle power.
- Family support.
- Can type with some limitations.
Limitations
- He is unable to hold a pen or pencil, making writing and drawing difficult
- Daily activities such as eating, dressing, brushing his teeth, and combing his hair have become challenging
- His ability to work at the juice bar tasks are limited.
- He is unable to ride a motorcycle or three-wheeler
Drawbacks
He is emotionally struggling due to the traumatic amputations. He is always covering the hand due to the stigma from the injury.
Subject / Need(s)
In his own words ...
"I Am K.Vivek Kumar
I Am From Ratnapura
I'm a IT Student
My fingers damage so i don't do any works
I want to write notes and exams
I want typing work and mouse working
I do daily works and i don't eat"
Needs of the need knower
- assistance in gripping (Palmer grasp and pincer grip)
- Writing assistance to continue his studies
Ideas
We listened to the need knower's needs and came up with the few ideas ...
Idea 1
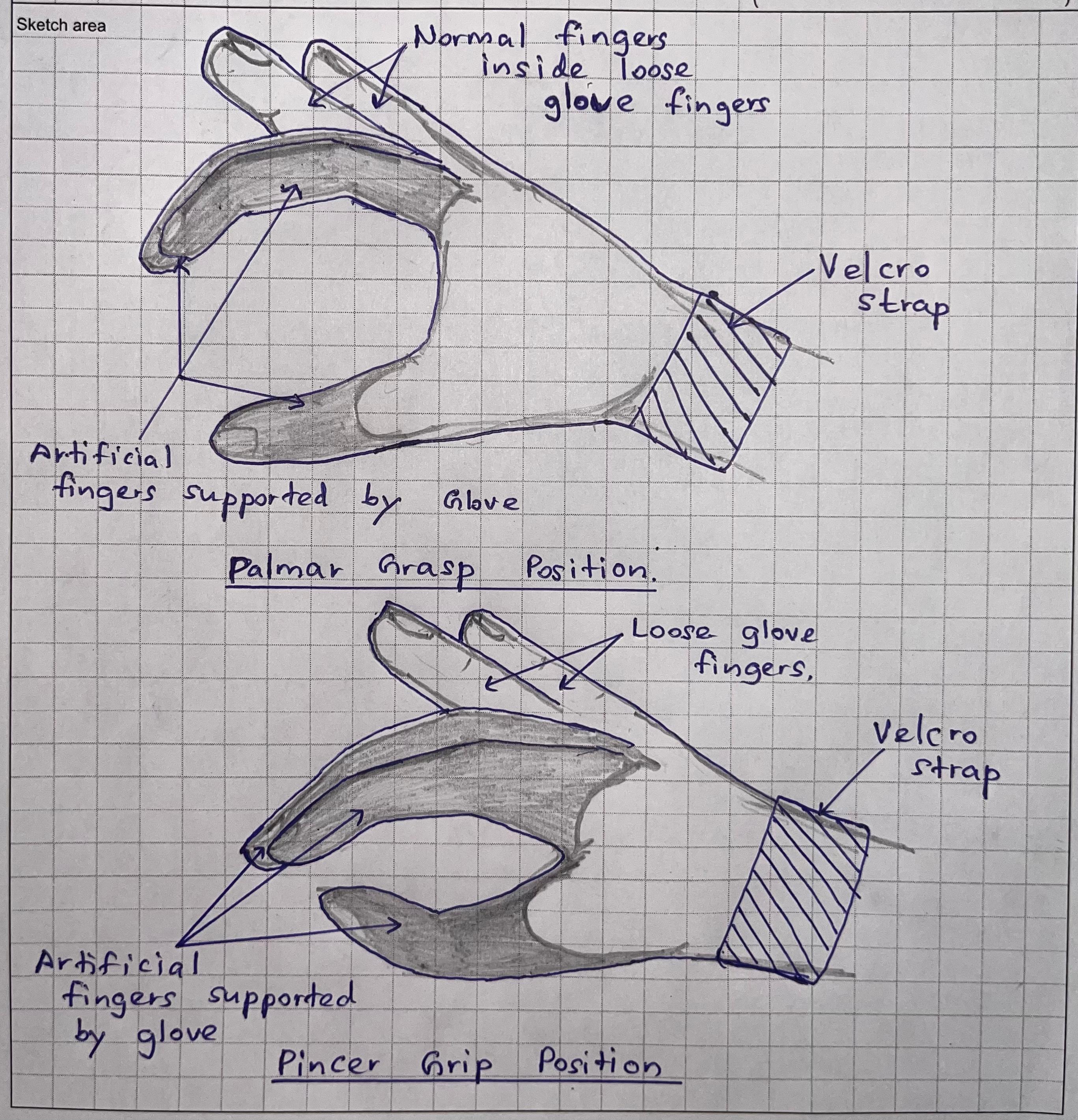
Create two
fixed-position gloves, each to support a specific grip. One glove
maintains the palmar grasp position for holding larger objects,
while the other is shaped for the pincer grip, allowing handling
of smaller items. He
can perform daily tasks by switching to either of the gloves.
Idea 2
Idea 3 (Finalized Idea)
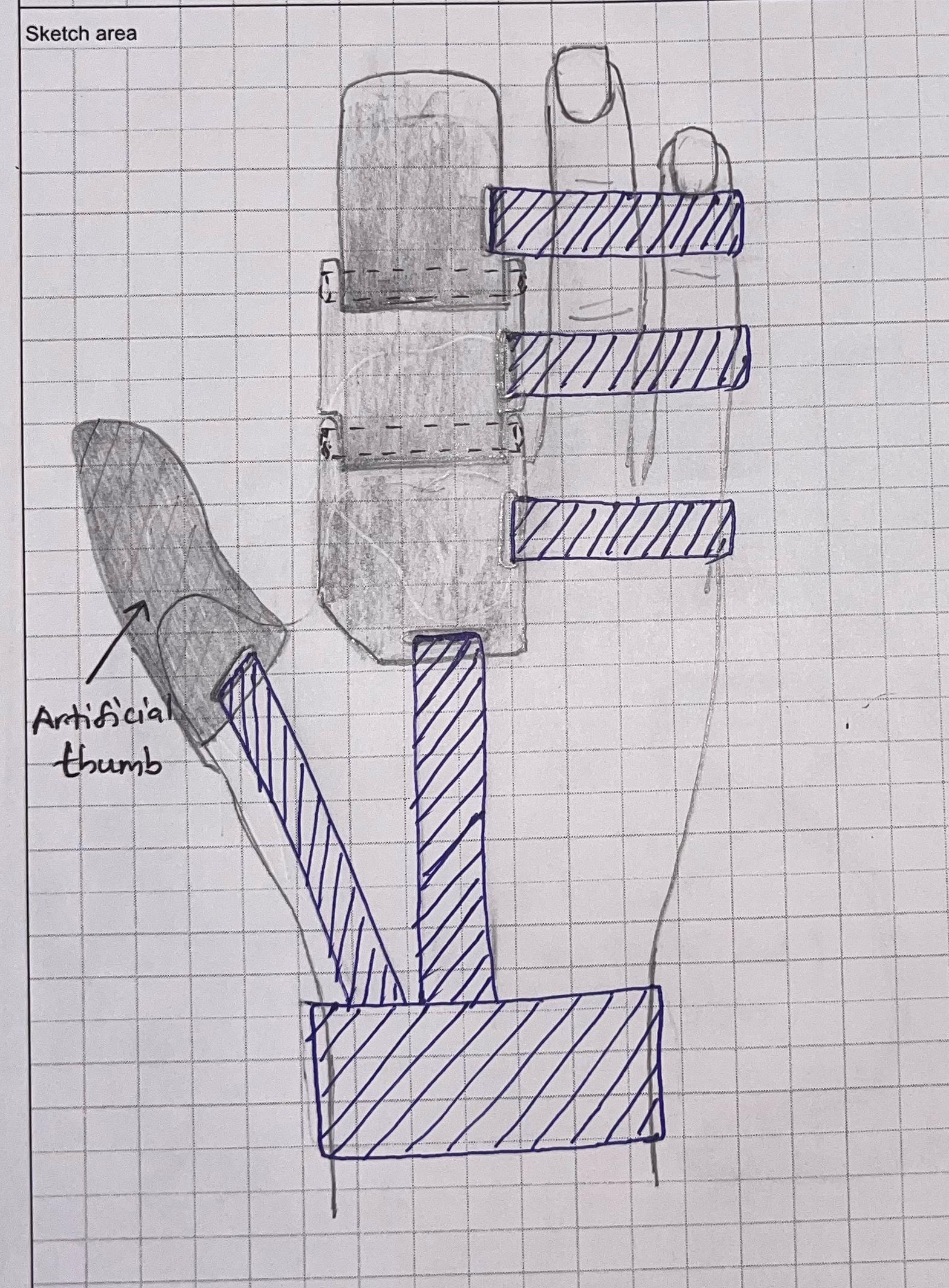
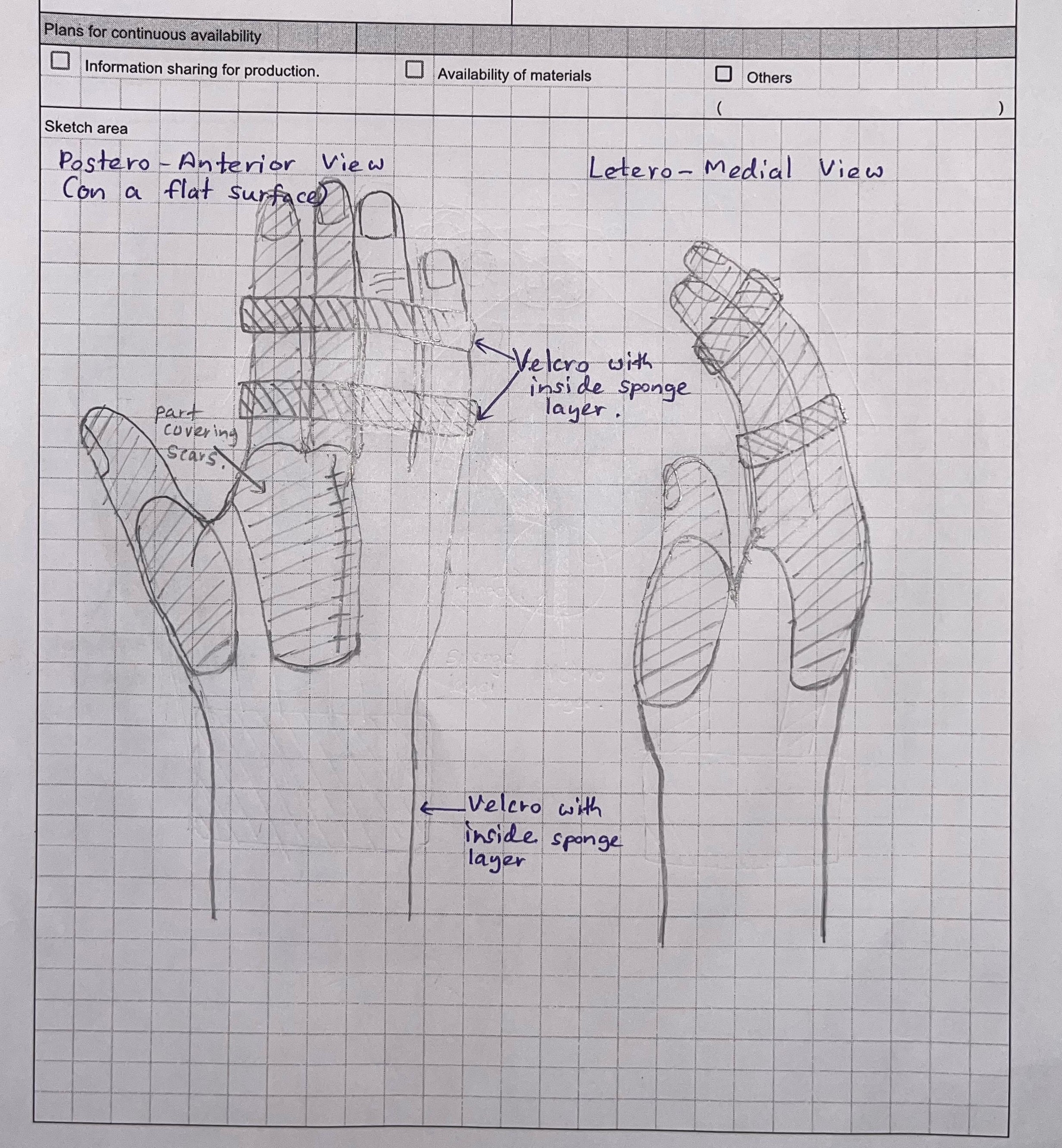
Our idea was to design two prosthetic components: one for the thumb, which the user can control using their stump, and another for the two lost fingers, segmented into three parts to mimic natural flexion. To enhance functionality, we plan to use a Velcro strap for buddy strapping
1st prototype for the index and middle fingers
A prosthesis for the the index and middle fingers, which is movable from the MCP, and both IP joints.
The power to move the joints is provided by the flexing and extending the remaining ring and little fingers.
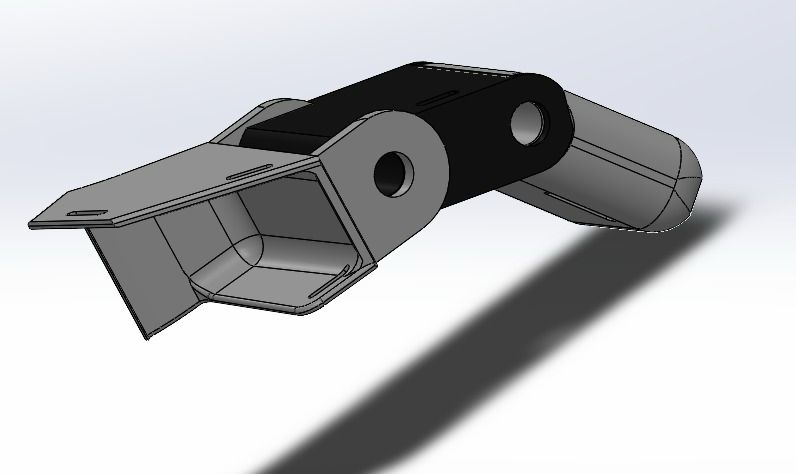
2nd Prototype
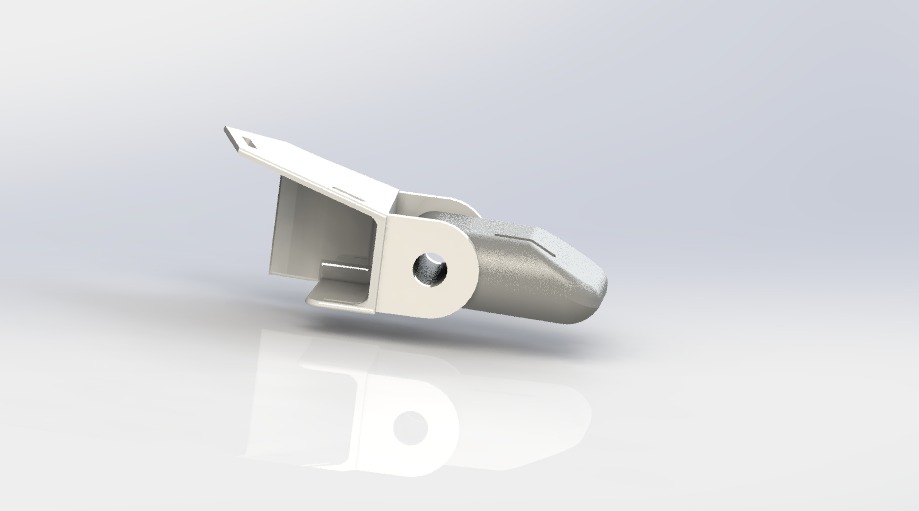

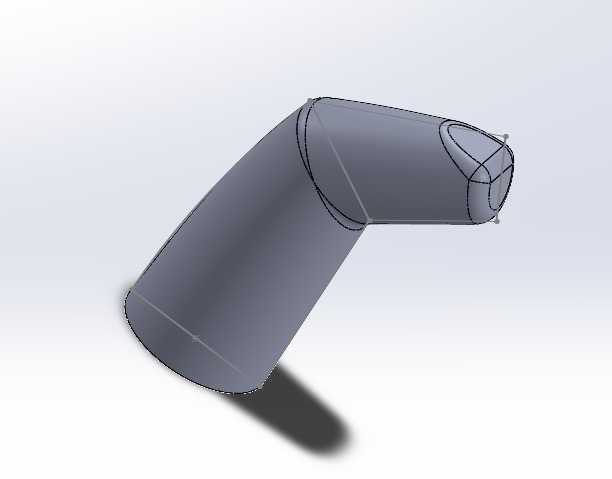
From our first prototype, we found the 3-way structure too long, affecting usability. To improve functionality, we removed the middle part and directly connected the tip to the base. Additionally, we added a thumb prosthetic with slight flex, enhancing the user's ability to perform daily tasks.
Build it by yourself !
Materials needed

- Prototype testing - we used PLA
- Recommended material of the product - Silicon / TPU
- 3D scanner
- 3D printer
- (Zip ties)
Designing
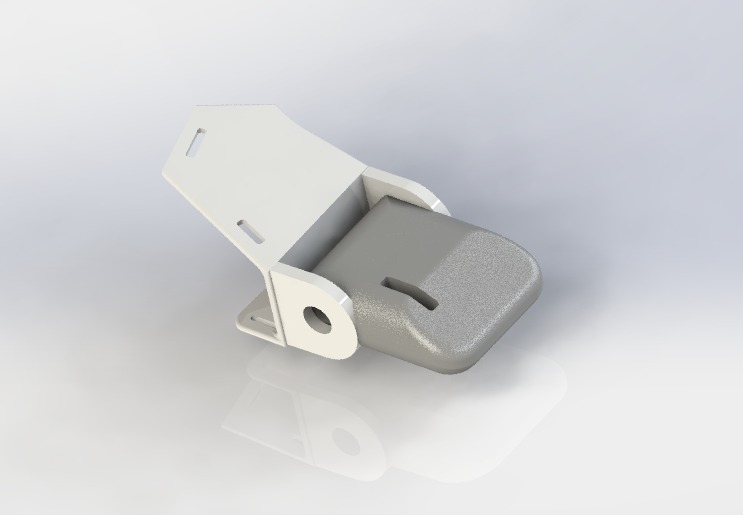
- Design the index and the middle fingers into 3 phalanges
- Print 2 rods to bridge the separate phalanges
- Design the thumb in a slightly flexed position in order to enhance the pincer grip (opposition)
- Keep holes for buddy strapping using velcro in the index (see pics in results)
Assembly
- Assemble separate parts using the rods and fix them from either sides using glue or use zip ties
- Add padding into the surfaces which contact the skin
- Enjoy your product !
Design File
Design Diagrams (Open with adobe pdf reader)
Results

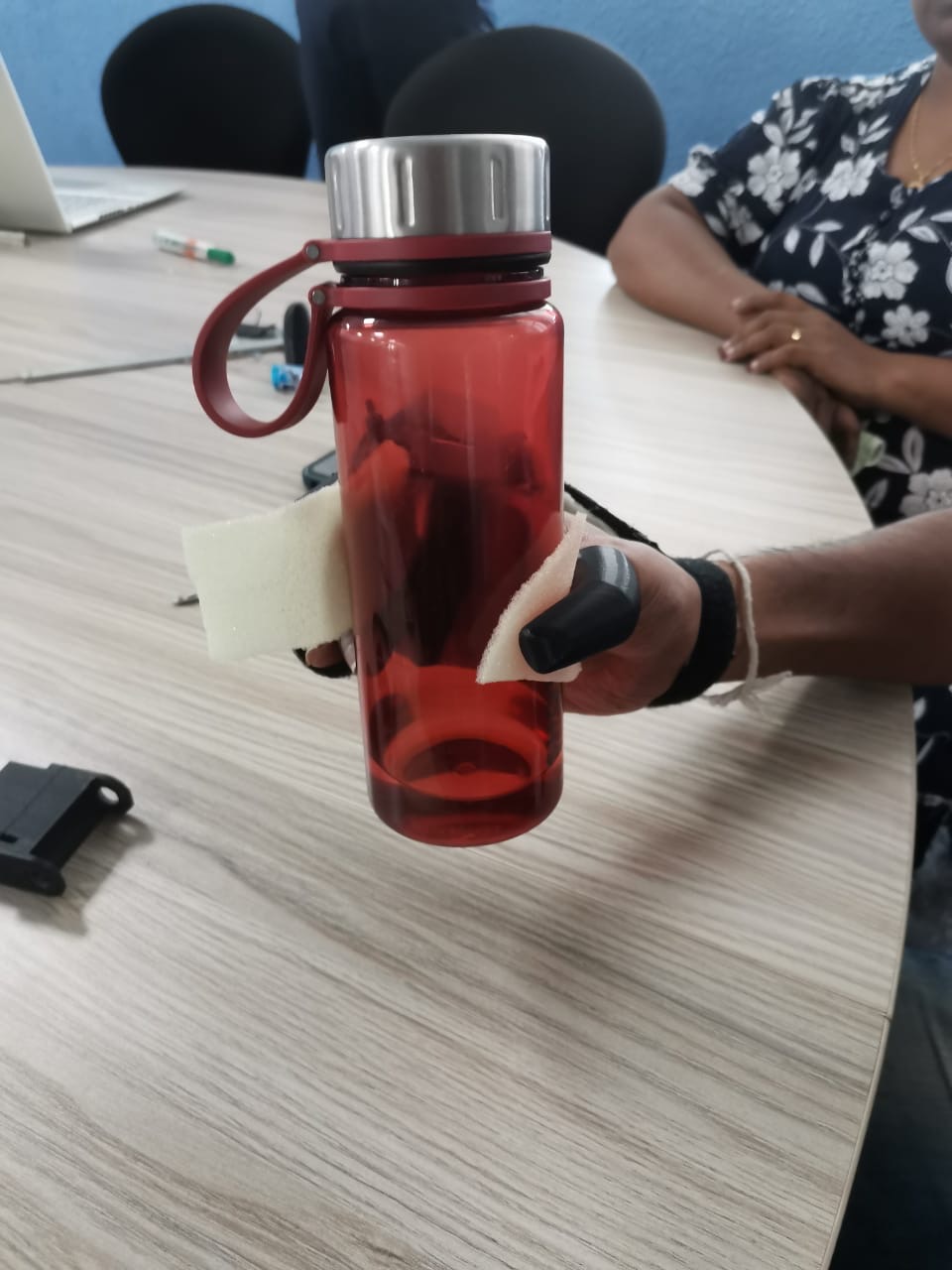
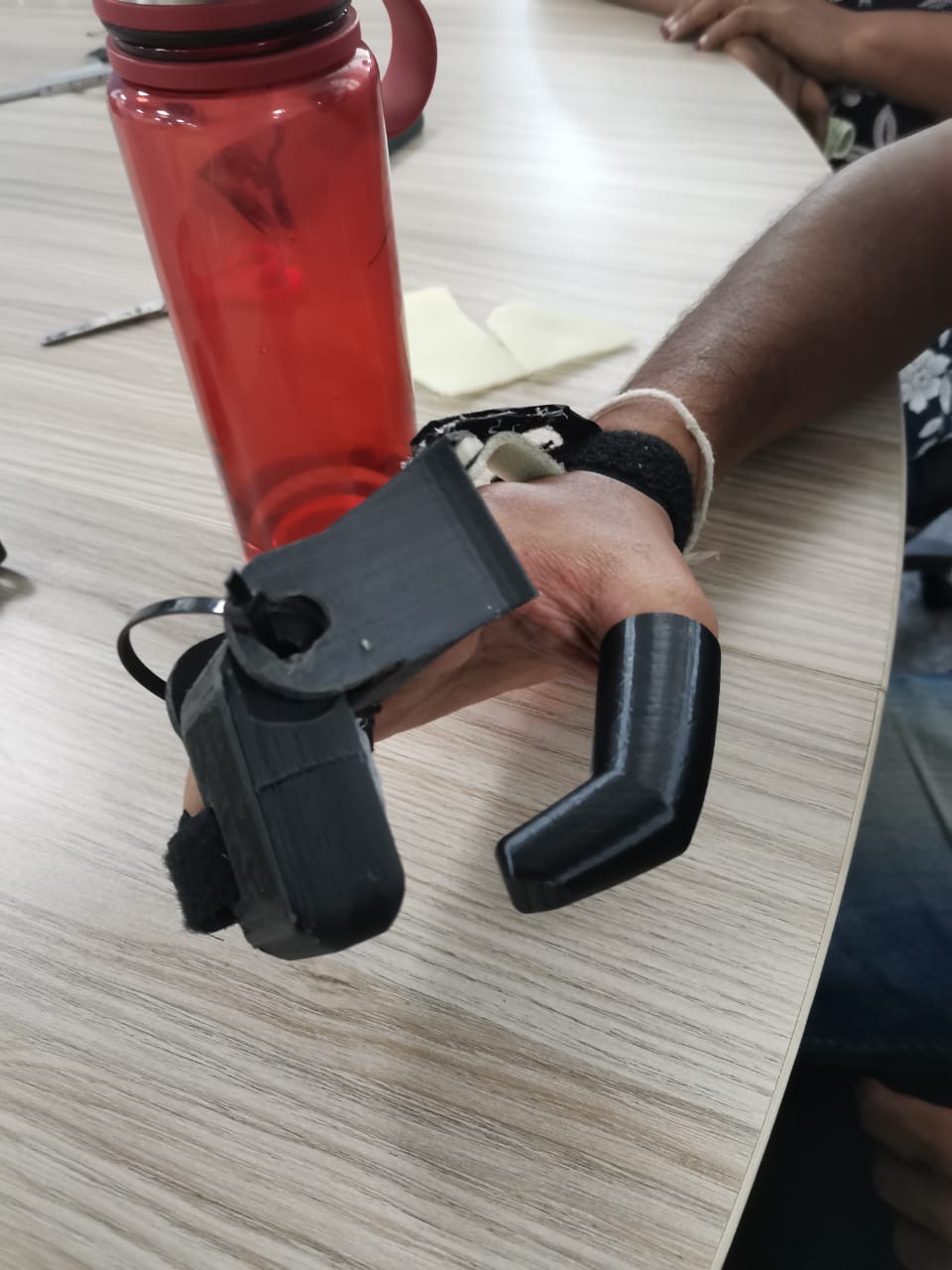
Patient can wear the equipment by himself. Patient is able to bend the prosthesis used for the index and middle finger using remaining two fingers. He is able to do the palmar grasp with the help of thumb prosthesis. Thumb prosthesis is able to function with the help of remaining part of finger.
Future Prospect(s)
Future improvements
- Make the device more humanoid, accurate and attractive.
- Focus on material selection for durability and flexibility eg:Si/TPU
- Incorporate user feedback
- Use a net-like framework to make it more skin-friendly
- Enabling him to design more tools for his daily activities since he is interested about 3D designs