サーボモータとは?
- サーボモータとは、回転位置を制御することができるモータで、ロボットの関節部分などに用いられることが多い。
- 回転位置の検出器付きのモーターで、フィードバック制御されるものが一般的。
サーボドライバ
- サーボモータはPWM信号で制御されることが一般的。PWM制御とは電源オン/オフのパルス間隔を変化させることで制御を行う方式である。
- CHIRIMENからPWM信号を出力するために、I2Cインターフェースを持つサーボドライバを使用する。
- サーボドライバはI2Cの信号を受けて、PWM信号によってサーボモータを制御する。
サーボモータサンプルアプリの実行
- サーボモータサンプルアプリの読み込み
- サーボモータ回路の配線
- アプリ実行
サーボモータサンプルアプリの読み込み
- サーボモータサンプルアプリをダウンロードして、任意のディレクトリに展開する。
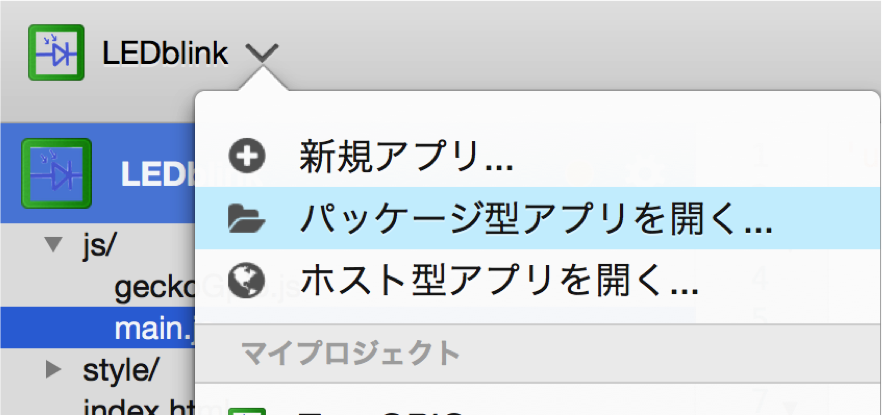
- Web IDE左上から「パッケージ型アプリを開く」からダウンロードしたボタンサンプルアプリを読み込む。
サーボモータ回路の配線
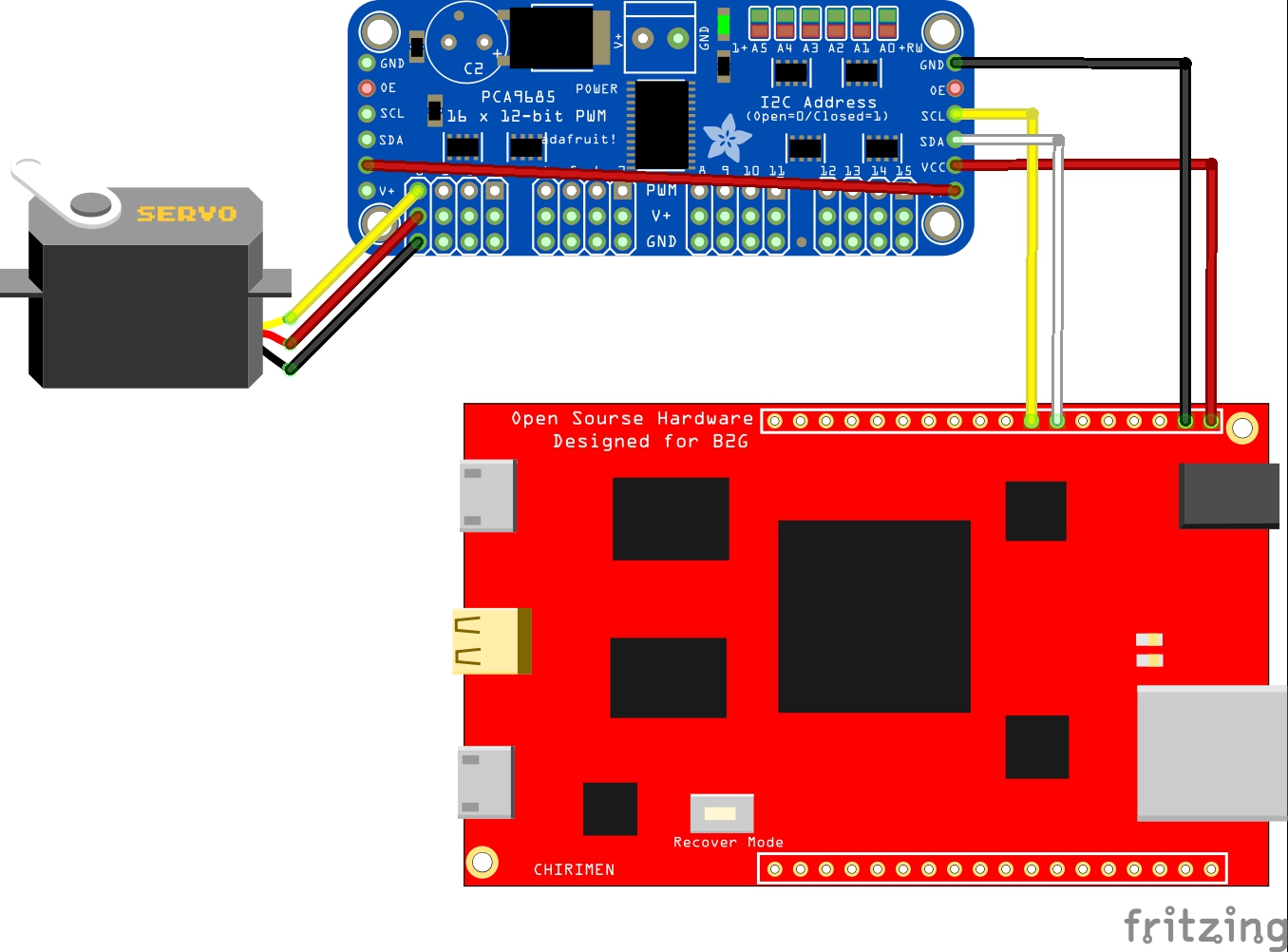
- 配線図に従ってサーボモータ、サーボドライバを接続する。接続にはスルーホール用ジャンパ線を用いる。
- CHIRIMENのI2C0_SDA(CN2-12)、I2C0_SCL(CN2-11)とサーボドライバのSDA、SCLを接続する。
- CHIRIMENのGND(CN2-1)、VCC(CN2-18)とサーボドライバのGND、VCCを接続する。
- サーボドライバのV+(モータ用の電源入力)とVCCを接続する。
- サーボモータのPWM、V+、GNDとサーボドライバのPWM、V+、GNDを接続する。
アプリ実行
- 配線が正しいことを確認し、CHIRIMENとPCを接続する。
- アプリをインストールする。
- 正しく動作すればサーボモータが回転し始めることが確認できる。
プログラムの解説
- ライブラリの読み込み
- I2Cの初期化とポートオープン
- サーボドライバの初期化
- サーボモータの制御
ライブラリの読み込み
I2Cの初期化とポートオープン
サーボドライバの初期化
- サーボドライバによりサーボモータを制御するために、サーボドライバの初期化処理を行う。
- PCA9685.init(<I2Cポートオブジェクト>,<デバイスアドレス>)でサーボドライバの初期化を行うことができる。
- サーボドライバのデバイスアドレスは0x40(初期設定)を用いる。
サーボモータの制御
- サーボモータの制御を行う。
- PCA9685.setServo(<I2Cポートオブジェクト>,<デバイスアドレス>,<サーボモータのID>,<サーボモータの角度>)でサーボモータを制御することができる。
- <サーボモータのID>でサーボドライバに接続されたどのサーボモータを動かすかを指定する。0〜15の整数で指定する。
- <サーボモータの角度>で指定した角度にサーボモータを動かすことができる。-90〜90の整数で指定する。