フィールドワーク前
FabQuestへの参加が決まったとき、私たちは「鎌倉」という地名から、観光地としてのイメージしか持っていませんでした。
観光客が多い場所だから、何か便利なものを作れるのでは?と考え、アイデアを出していました。
観光客が多い場所だから、何か便利なものを作れるのでは?と考え、アイデアを出していました。
初期のアイデア
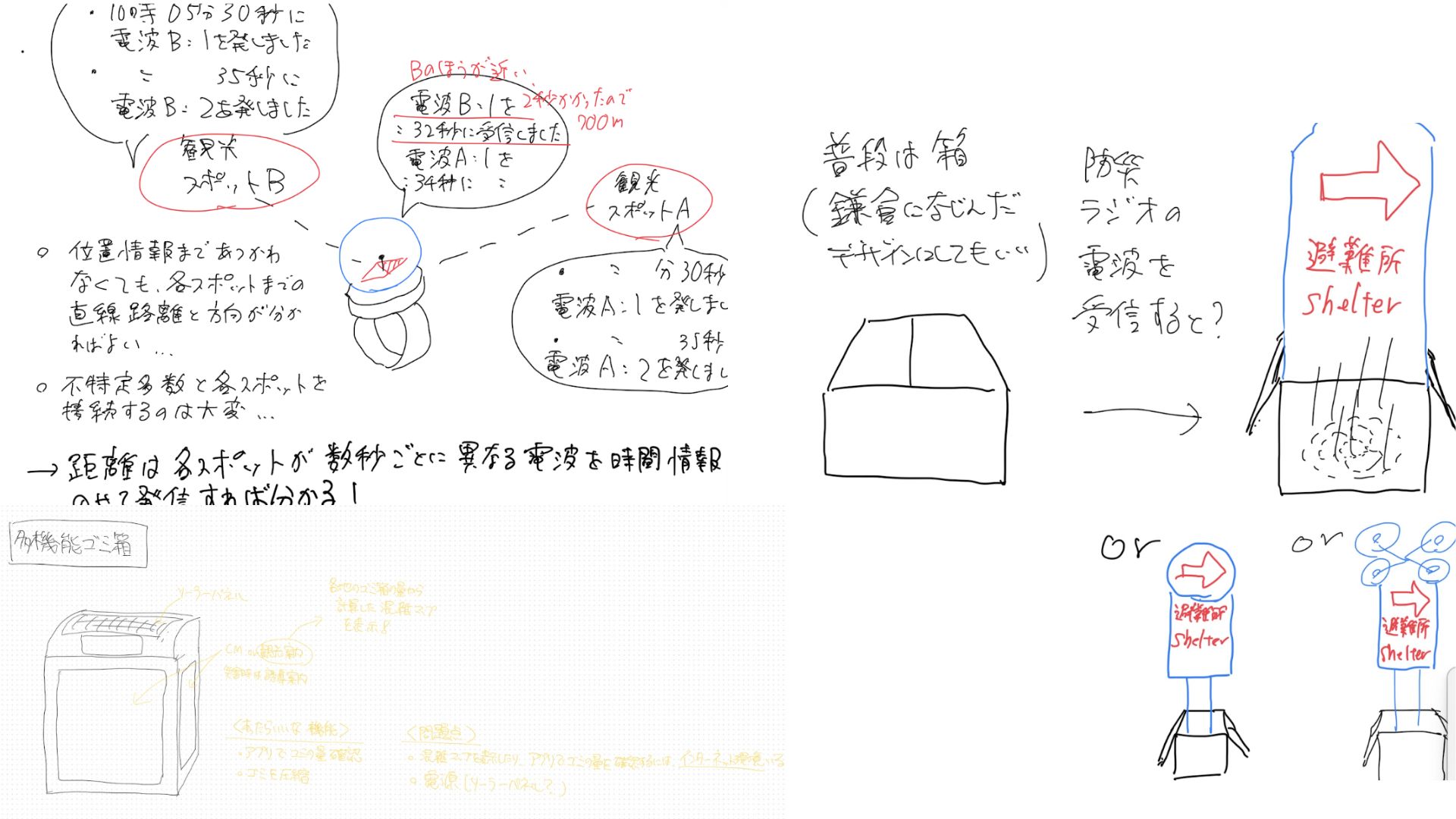
・移動ゴミ回収ロボット
・海岸のごみを拾うヤドカリロボット
・災害時の避難誘導
・観光案内腕時計
先生にインタビュー
この初期案をもって、高専(在籍校)内の先生方に意見を聞きに行ったこともありました。
高専には、様々な分野の専門教員がいるため、それぞれ違った視点で、私たちのアイデアに意見をくださいました。
しかし、この時点では、メンバー同士の興味関心が一致せず、取り組む課題を決めかねていました。
制作のきっかけ
ロボットという選択
私たちは、それぞれ異なる専門分野を持つメンバーが集まったチームです。メンバーの技術には、回路設計、3D CAD、プログラミングなどがあります。
三人とも、興味関心は異なっていたものの、
それぞれの共通する思いとして、自分の技術を地域の課題解決に活かしたいと考えていました。
そこで皆の意思が固まり、自分たちの技術を最大限に活かす方法として、まず、何かのロボットを開発しよう!とチームで決めました。
三人とも、興味関心は異なっていたものの、
それぞれの共通する思いとして、自分の技術を地域の課題解決に活かしたいと考えていました。
そこで皆の意思が固まり、自分たちの技術を最大限に活かす方法として、まず、何かのロボットを開発しよう!とチームで決めました。
初めてのフィールドワーク


初めてのフィールドワークでは、地元の方々からお話を伺い、「カツオノエボシに刺される事故が増えている」という問題を知りました。
この問題は、私たちのロボット技術を活かして解決できるのではないかと考え、エボトルンの開発に取り組むことになりました。
カツオノエボシの調査
私たちは、カツオノエボシの存在を詳しく知らなかったので、フィールドワークから帰る新幹線の中から、数日間、カツオノエボシについて調べまくりました。
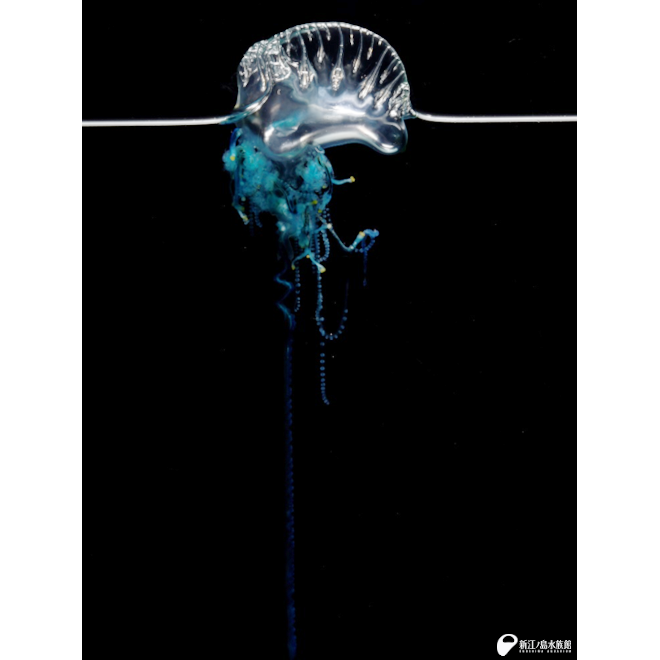
カツオノエボシは、美しくて興味深い生物なのに、その危険性だけで "ただ厄介なもの"として扱われてしまうのは惜しい。
カツオノエボシについての知識が増えるたび、そう思いました。
でも、人が刺されてしまうのは防ぎたい。
このジレンマをどうにかしたくて、私たちは考えました。
写真:新江ノ島水族館HP(2024/12/28) (https://www.enosui.com/diaryentry.php?eid=06506)
カツオノエボシは、美しくて興味深い生物なのに、その危険性だけで "ただ厄介なもの"として扱われてしまうのは惜しい。
カツオノエボシについての知識が増えるたび、そう思いました。
でも、人が刺されてしまうのは防ぎたい。
このジレンマをどうにかしたくて、私たちは考えました。
写真:新江ノ島水族館HP(2024/12/28) (https://www.enosui.com/diaryentry.php?eid=06506)
そもそもカツオノエボシとは
・ヒドロ虫網管クラゲ目カツオノエボシ科に属するクラゲの仲間
・1~10cmぐらいの浮袋を持つ
・平均10m(長いもので50m)程度の触手がついていて、刺激を受けると刺胞毒を発射する
・死んでいても刺胞毒は発射される
・人が触ると感電したかのような痺れと激痛を与える
・二度に刺されると、アナフィラキシーショックにより死ぬ可能性もある
つまり、人にとって、毒による危険性を持っている生物です。
そんなカツオノエボシは、近年、砂浜に漂着することが増えています。
カツオノエボシの被害(鎌倉)

鎌倉での被害を調べたところ、
2022年7月では、漂着してきたカツオノエボシに70人程度が刺され、10人が緊急搬送された日がありました。
朝日新聞 青い風船?それは猛毒クラゲ 湘南で一日約70件の被害、救急搬送も (2024/12/10閲覧)
https://www.asahi.com/articles/ASQ745QMLQ74ULOB00D.html
カツオノエボシの被害(日本全体)
カツオノエボシの被害が鎌倉以外でどれぐらい起こってるのかを調べました。
その結果、
太平洋側の海岸を中心に、少なくとも24の道府県で、
日本海側では、鳥取、島根、福井、石川などで、
漂着した事例がありました。
1stプロトタイプ

「カツオノエボシに刺される被害を減らす」を目標に作成した、1stプロトタイプです。
機能としては、
観光客や子供が、海にいるボートをVRゴーグルの視点から操縦し、カツオノエボシを回収する
というものです。
海を漂うカツオノエボシを回収しようと思っていた
1stプロトタイプでは、砂浜ではなく海を漂うカツオノエボシを回収することを目指しました。
理由は2つあります。
1. 砂浜のカツオノエボシは人がトングで回収する方が効率的だが、海での回収は労力がかかり、人が泳ぐのは危険、船を使うと費用が高いため。
2. 海で刺される事故の方が深刻と考えたため。
特に鎌倉の海はサーファーが多く、気づかずに触れてパニックになり、溺れるリスクがあると考えました。
理由は2つあります。
1. 砂浜のカツオノエボシは人がトングで回収する方が効率的だが、海での回収は労力がかかり、人が泳ぐのは危険、船を使うと費用が高いため。
2. 海で刺される事故の方が深刻と考えたため。
特に鎌倉の海はサーファーが多く、気づかずに触れてパニックになり、溺れるリスクがあると考えました。
ラジコンボートで回収する方法に迷走
被害を減らすには1匹2匹回収したところで意味はない、ということで
私たちは海上のカツオノエボシを効率よく多く回収する方法を考えました。
・ドローンで画像認識をしてカツオノエボシの位置を大量に特定し、ラジコンボートで見つけたカツオノエボシを効率よく回収する案。
・ラジコンボートに網を張る機能を付けて、一度に大量に回収する案。
・ブイ(海上に浮かべる浮き輪のようなもので、船舶に岩礁や浅瀬などの障害物の存在を知らせたり航路を示すために使う)にセンサーと発信機をつけて、信号があったところの近くをラジコンボートで捜索し回収する案。
いろいろ考えましたがどれも実現可能性が低く、実験も難しい現状に頭を悩ませました。
「遊び × 環境保全」案を思いつく
ラジコンボートの操縦者について着目したとき、回収をビーチの管理者や清掃団体にお願いするのではなく、子どもや観光客がやりたくなるような工夫をすれば労力が分散されて回収量も多くなると考えました。
そこで思いついたのが、ボートに取り付けたカメラとVRゴーグルが連動し、手元のリモコンで操作できるラジコンボートというもの。
これによって実際にボートに乗り込んで操縦しているような感覚で回収でき、回収量が多いほど得点が上がるといった対戦要素を入れればより沢山の操縦者カツオノエボシを回収できると考えました。
海という大きな壁
しかし、海でカツオノエボシを回収する、というのは非常に難しいことだとわかりました。
内部審査での講評
内部審査で、「遊び×環境保全」案を提案しました。
以下のような講評をいただきました。
・海の管轄は分かりにくく、許可を取ることが難しいこと
・海では大勢の海水浴客やサーファーがいるので、接触事故が起きる可能性が高く、事故が起きた時の責任が重いこと
苦心したところ
私たちはカツオノエボシについてほぼ知見がありませんでした。
というのも、カツオノエボシは根本的な実態が解明されておらず、不明な点が多いので、ネットで探してもあまり情報が得られないんです。
...これではまずい!
そう思い、カツオノエボシについての研究記事をいくつかネットに出していた、新江ノ島水族館を訪れました。
新江ノ島水族館へインタビュー
・カツオノエボシの生態に関する質問
・湘南の海の被害の実態
・回収ロボット制作のアドバイス
など、多くのことを質問し、ご対応していただきました。
そのなかでも、自分たちがエボトルンの作成の参考になったのは、
・波打ち際に流木と一緒にカツオのエボシもライン上に流れ着くこと
・ビーチによっては早朝に清掃団体で漂流物を回収しているところもあること
・砂浜の方が海より被害の数が多いこと
でした。
砂浜のカツオノエボシ回収にシフトチェンジ
以上の講評とインタビューの結果より、海を漂うカツオノエボシの回収案が難しいことが分かりました。
そして、ここから、アイデアの大きな変更を行おう、ということになりました。
水族館で得た学びを以下のように解釈し、制作を進めました。
・波打ち際に流木と一緒にカツオのエボシもライン上に流れ着くこと
→回収方法の大きなヒント。
・ビーチによっては早朝に清掃団体で漂流物を回収しているところもあること
・砂浜の方が海より被害の数が多いこと
→砂浜のカツオノエボシを回収することも問題解決につながる。
・カツオノエボシと知らずに触ってしまう人がいる
→カツオノエボシと知ってもらう仕組みが必要
エボトルンの機能の考案

エボトルンには、二つの機能があります。
1.砂浜の上でカツオノエボシを回収する
これは、
・キャタピラ
・回収機構
で達成されます。
2.カツオノエボシへの理解を広める
これは、
・外観
で達成されます。
キャタピラ制作日記
「砂浜でカツオノエボシを回収する」を目標に製作しました。
そのために、砂浜の上を走れる足回りが必要になりました。
キャタピラ制作1
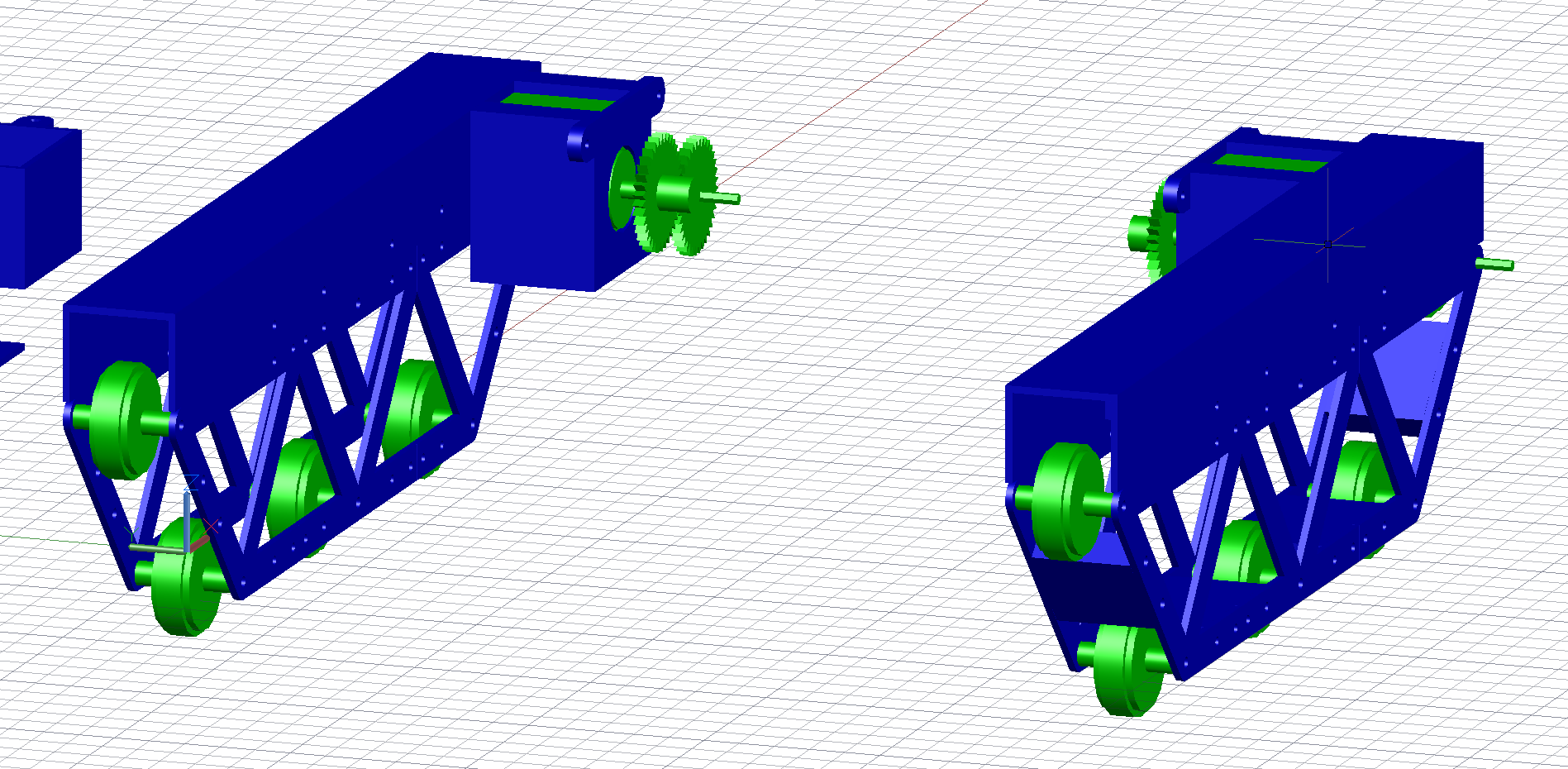
砂浜を走るためにはかなりの走破性が求められるので、走破性の高いキャタピラを製作することにしました。
アクチュエータにはステッピングモーターを採用しました。
これは回転角を機械側で制御できるモーターで、駆動力も高く、走破性と繊細な制御を両立できます。
キャタピラのクローラー(ベルト)部分はタミヤの「連結式クローラー&スプロケットセット」を購入して使うことにし、その他のパーツ(骨組み、ホイール、ギヤなど)はCADや3Dプリンターを使って製作することにしました。
砂浜で実験
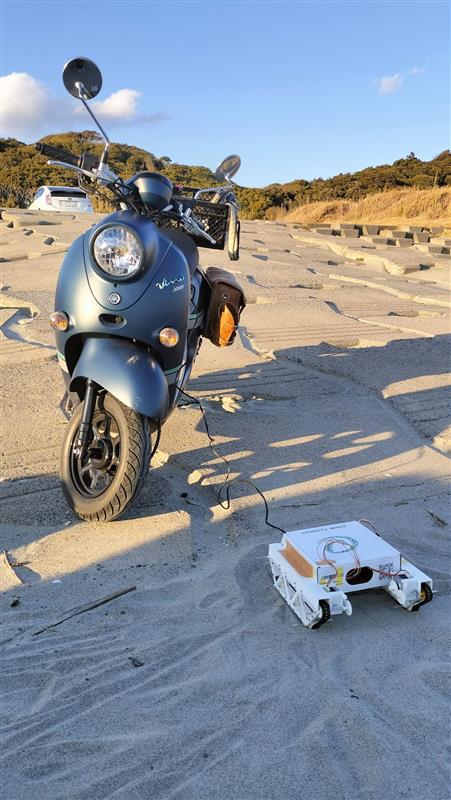
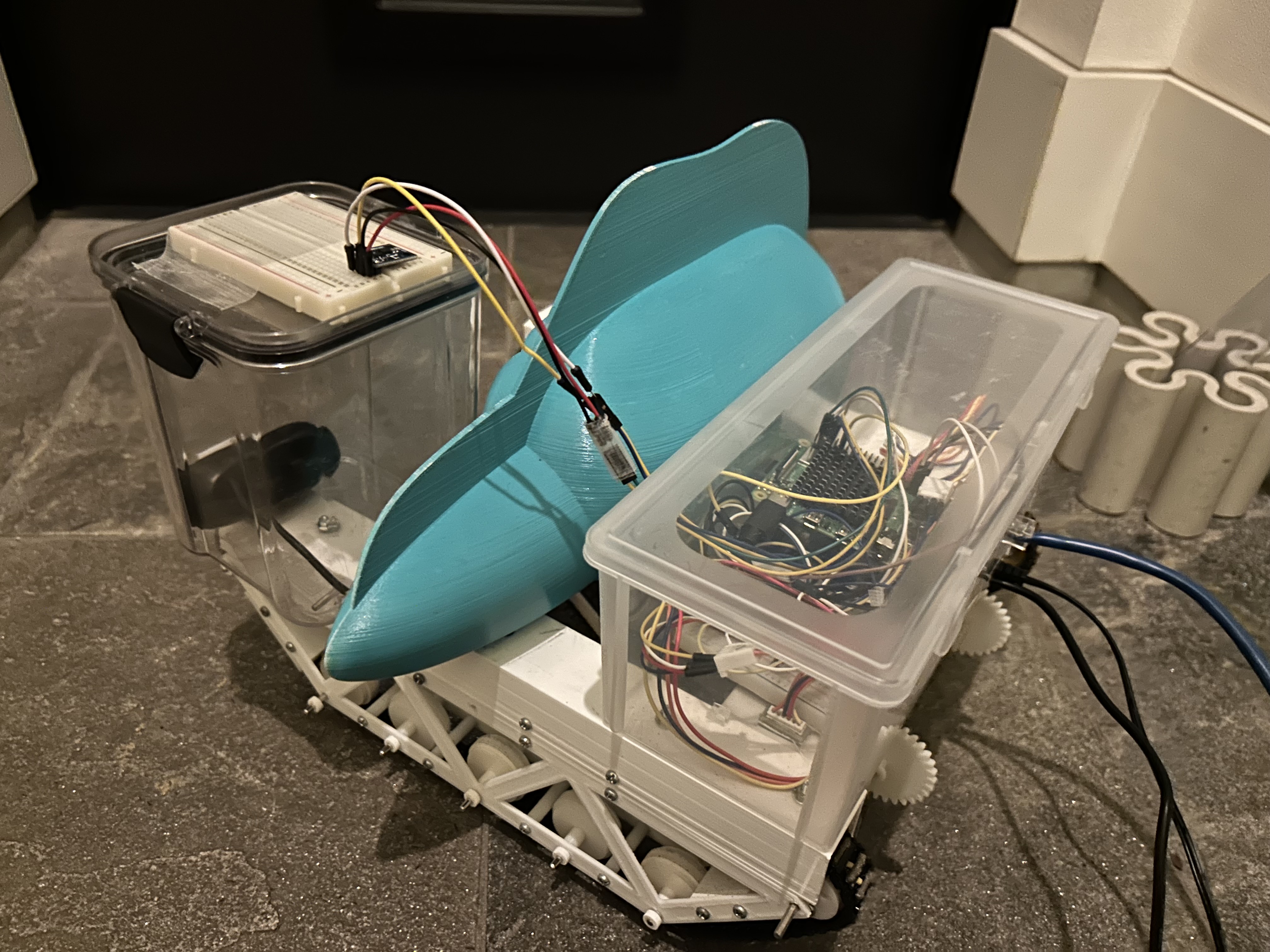
キャタピラと空き箱をくっつけて中に回路入れた2ndプロトタイプを用いて、砂浜の上を走ることができるか、という実験を行いました。
結果としては、
・固い地面や湿った砂浜、平坦な砂浜ではうまく動いた
・砂浜でも凸凹しているとスタックした
・流木など障害物があると絶対進めなかった
となりました。
3rdプロトタイプで、ここの改善をできるように頑張りました。
キャタピラ制作2
砂浜での実験であまりうまく動かなかったので改良することに。
1.砂浜で障害物に当たった時に、クローラー(ベルト)が押し込まれて、前方のタイヤが障害物を乗り越えるための角度が大きくなっていることに気づいた。
→ガイドをつけて押し込まれないようにし、乗り越えやすい角度を維持できるようにした。
2.参考に戦車の画像を調べてみると、タイヤとタイヤの間隔が狭いことにきづいた。
→接合部をなくし、タイヤの数を増やした。
3.多くのギアにはしっかりギアを噛み合わせられるインボリュート曲線が採用されていることがわかった。
→ネットからその曲線のCADデータを拾い、ギアを改良した。
結果、砂浜を難なく走れるようになった!
結果、砂浜を難なく走れるようになった!
モーターの防水機能


海付近で動かすロボットなので、防水機能を持っている必要がありました。
ステッピングモーター回転軸の防水に苦戦しました。
→水道の補修などで使うパッキンを使い、上から密閉するようにギアを取り付けることで解決しました。
また、接合部はシーリング材で埋めました。
人が回収するより価値を生み出すために
私たちははじめ、カツオノエボシを回収するなら人がトングで回収したほうが早そう、と断定していました。
しかし、人が回収するという作業をロボットで全て担うことができれば、回収ロボットにも存在価値が生まれると考えました。
そのために必要になってくるのが自律制御です。
人がロボットを操縦するのではなく、ロボットだけで回収作業ができるようにしたいと思いました。
モータードライバーに苦戦

2025/3/18に、キャタピラのモーターが動かなくなりました。
最初はモータードライバーが原因であることが分からず、配線の見直しやその他の可能性を探して苦戦しました。
電子工作に書いてある回路とプログラムを忠実に再現し、モータードライバーだけ差し替えるようにして検査すると、大半が故障していたことが分かりました。
→使えるモータードライバーを検証し集め、モーター単体を動かすことに成功。
故障の原因は、いまだ不明なので、模索したいと思います。
キャタピラの最終形態
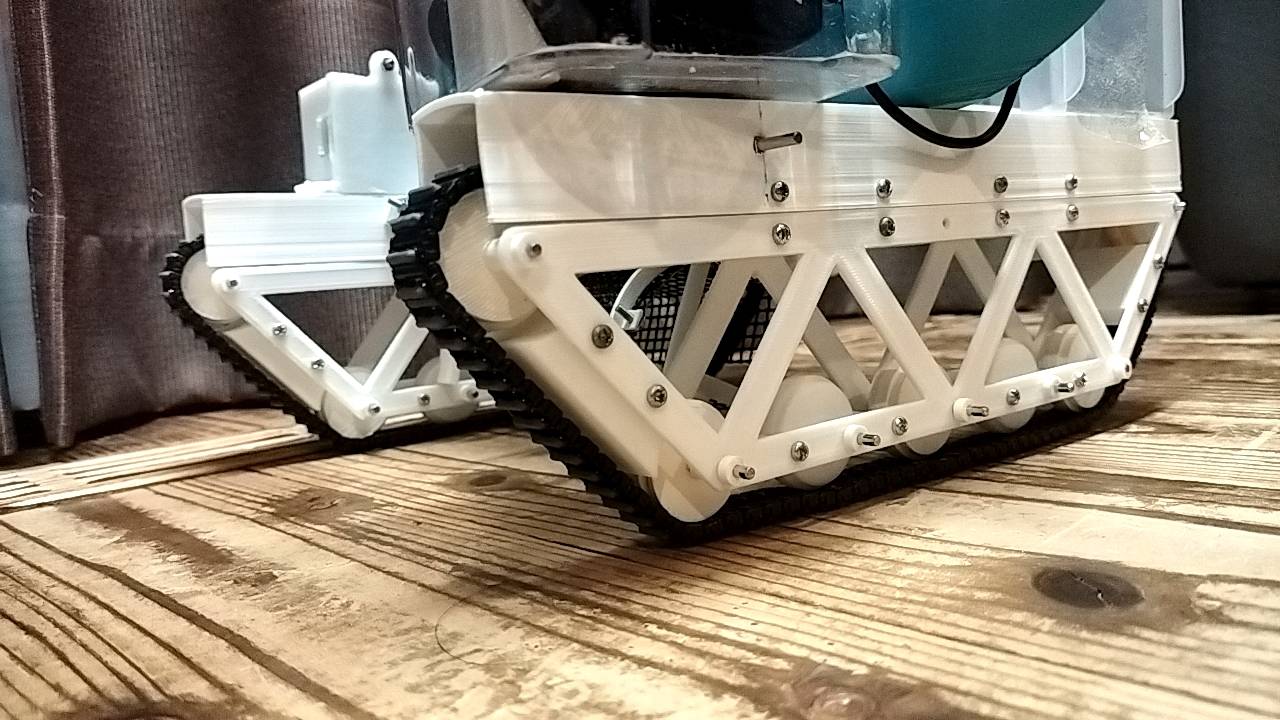
本体制作後、砂浜で動作実験をしてみると、トルク不足でキャタピラが動きませんでした。
原因は、防水設計で使ったパッキンが摩擦で抵抗になっていた。
→パッキンを外してみるとうまく動くようになった
そこで、ギア比を1:1から1:2に変更。
→速度は遅くなったがトルクが向上し、それなりの障害物なら乗り越えられるようになった
回収機構制作日記
「砂浜でカツオノエボシを回収する」を目標に製作しました。
砂の上にいるカツオノエボシを回収するための機構です。試作1

始めにカツオノエボシをどう回収するか、で一番に思いついたものをとりあえずで作りました。
・針を3Dプリンターで作るのは大変なので、レーザーカッターでプロトタイプを作った
・折れやすかったり、危険だったりといろいろな問題点があった
・カツオノエボシの浮袋の中身は気体で風船のようになっているのでうまく刺さらない可能性があった
試作2

・ステッピングモーターを使いL字の網を回転させてスコップのようにすくう方法を思いつく
・網は百均のもの・大体のパーツは3Dプリンター制作
・ホームセンターで買ったアルミの角パイプを軸として使用
・近くの公園の砂場で実験してみると、L字の網を回転させるだけでは砂でカツオノエボシが押し出されてしまい、うまくすくうことができない場合があった
回収機構の最終形態
・確実に回収できるよう、砂で押されてもこぼれないようにガイドを取り付けることに
→すくう前はガイドがない状態で、すくっている最中にガイドがサポートし、回収ボックスに入れるときにはガイドが干渉しないように外れるような工夫が必須
→苦悩した末、磁石とステッピングモーターの回転速度をうまく扱って、サーボモーターなど新たなアクチュエータを使わずに機構的にこれらの動きを再現する方法を思いつく
回収機構の動き:https://youtu.be/58icDcruBl8
回収機構の動き:https://youtu.be/58icDcruBl8
制御
湿度センサで制御

水族館の職員さんから、波打ち際に流木と一緒にカツオのエボシもライン上に流れ着くと聞いたことから、波打ち際の湿度の差を利用して回収できると考えました。
具体的には、ロボットの左右に湿度センサを取り付け、波打ち際の左右の湿度の差を利用して進んでいくという形です。
具体的には、ロボットの左右に湿度センサを取り付け、波打ち際の左右の湿度の差を利用して進んでいくという形です。
波のうち際で回収するための方法の問題点
しかし、波のうち際をセンサーで認識する方法には二つの問題点がありました。
1つ目は、センサーを海水に接触するので錆びてしまう可能性があること。
2つ目は常に漂流物がライン状になっているところに濡れている・いない境界があるわけではないことです。時間がたって蒸発し、境界がなくなっている可能性がありました。
ではどうすればいいのか。
次に思いついたのが、GPSを使ってあらかじめ波打ち際を走る経路を設定し、画像認識を使ってカツオノエボシを見つけ次第回収するという方法です。この方法ならセンサーなどを用いずに波打ち際を自走できます。また、潮の満ち引きに対応して経路を設定して走らせることもできます。
GPS制御をすることに
GPSで位置情報を取得するのは、Arduinoやラズパイ単体ではできないので、専用のセンサを購入する必要があります。
しかし、なるべく身近なものでつくりたかったので自分のiponeをロボットに載せて、その位置情報をicloud経由で取得することにしました。
しかし、なるべく身近なものでつくりたかったので自分のiponeをロボットに載せて、その位置情報をicloud経由で取得することにしました。
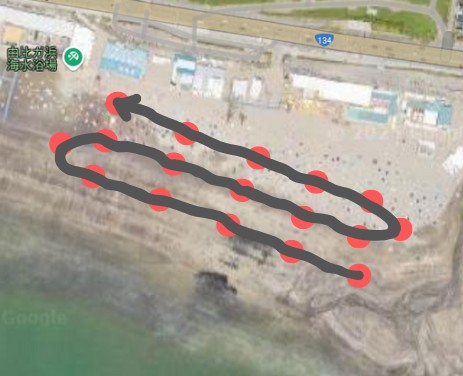
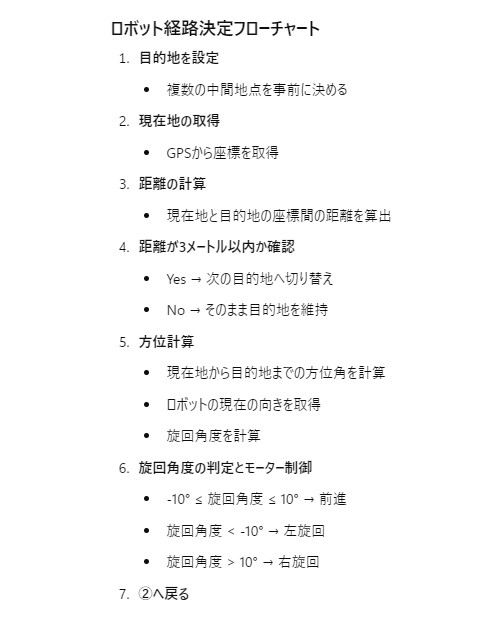
制御のフローチャート
まず、あらかじめ、走りたい経路上の座標をある程度プロットしておきます。
次に、今のロボットの方位と、現在地とAくん家の方位を出します。二つの方位から何度旋回すればいいのかをだします。もし、+10以上だったら右に旋回し、-10以上だったら左に旋回します。
①Aくん家(出発地) ②Bくん家 ③Cくん家... ⑩Jくん家(ゴール)みたいな感じです。
次に、GPSから現在地の座標を取得して、Aくん家との距離を出します。もし、距離が3m以内になったらBくん家を目的地にかえます。
※GPSは誤差があるので、3m以内になったら目的地を次に変えるようにしています。
次に、今のロボットの方位と、現在地とAくん家の方位を出します。二つの方位から何度旋回すればいいのかをだします。もし、+10以上だったら右に旋回し、-10以上だったら左に旋回します。
※誤差もでるので-10から10の間はまっすぐ進みます。
GPSの誤差に苦戦
GPSには数十cm~5mぐらい誤差が出てしまいます。
ロボットの今の方位を一つ前の座標と今の座標を使って推定しようと思っていましたが、少しのGPSの誤差でも大きな角度のずれになってしまいました。
そこで、電子コンパスを使うことにしました。
そこで、電子コンパスを使うことにしました。
電子コンパスに苦戦
電子コンパスを使うことで10度ぐらいの誤差は出てしまいますが、ある程度正確なロボットの方位が分かるようになりました。
しかし、電子コンパスには弱点があります。
しかし、電子コンパスには弱点があります。
電子コンパスは地磁気を検知して方位を計算するのですが、近くにラズパイなどの電子機器があると大きく値が変わってしまいます。
コードを長くしてラズパイなどから離せばいいと思ったのですが、コードを長くする分信号が伝わりにくくなってしまって、接続がうまくいきませんでした。ちょうどいい塩梅を探すのに苦労しました。
コードを長くしてラズパイなどから離せばいいと思ったのですが、コードを長くする分信号が伝わりにくくなってしまって、接続がうまくいきませんでした。ちょうどいい塩梅を探すのに苦労しました。
完成!
公園で走らせてみたところ、うまく制御することができました!
現状の課題としては、位置情報取得、角度計算→モータ制御という流れで制御しているので、一回一回停止してしまうところです。並列処理をすることで解決したいです。
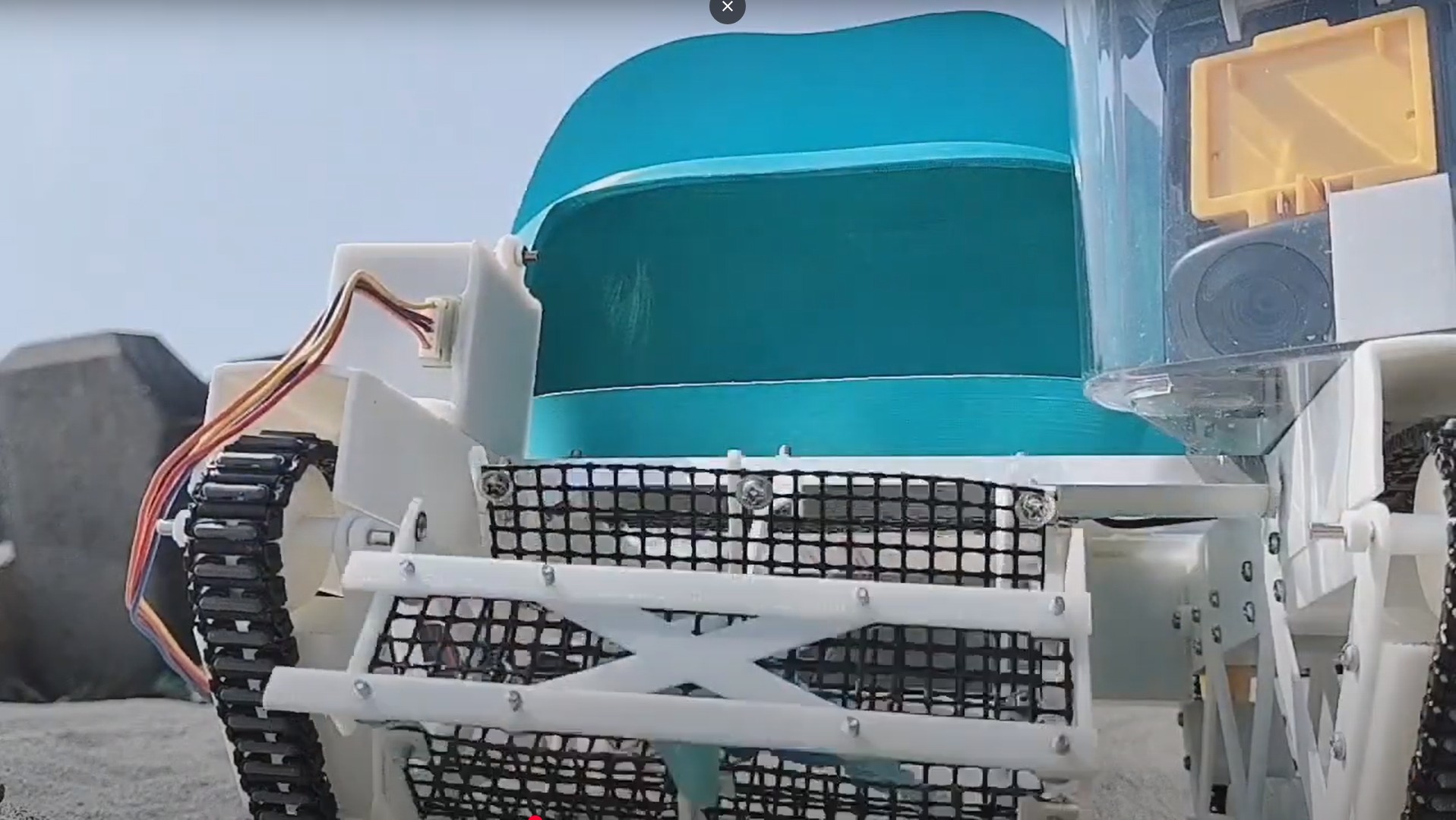
外観
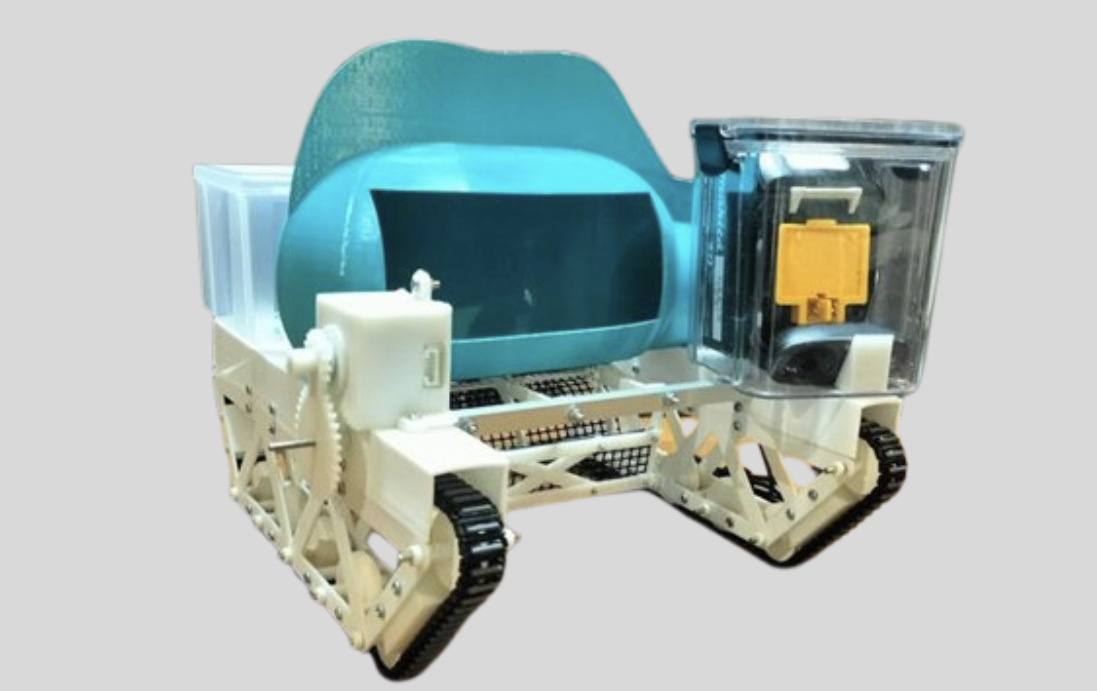
カツオノエボシ型の回収BOXを取り付け、見た目を奇抜にし、人々からの興味、関心を持ってもらえるように工夫しました。
また、ロボットに興味を持った人が、回収BOX上部に貼ってあるQRコードを読み取ると、カツオノエボシの生態についてや危険性を知ることができるサイトに飛ぶことができます。
回収ボックス制作
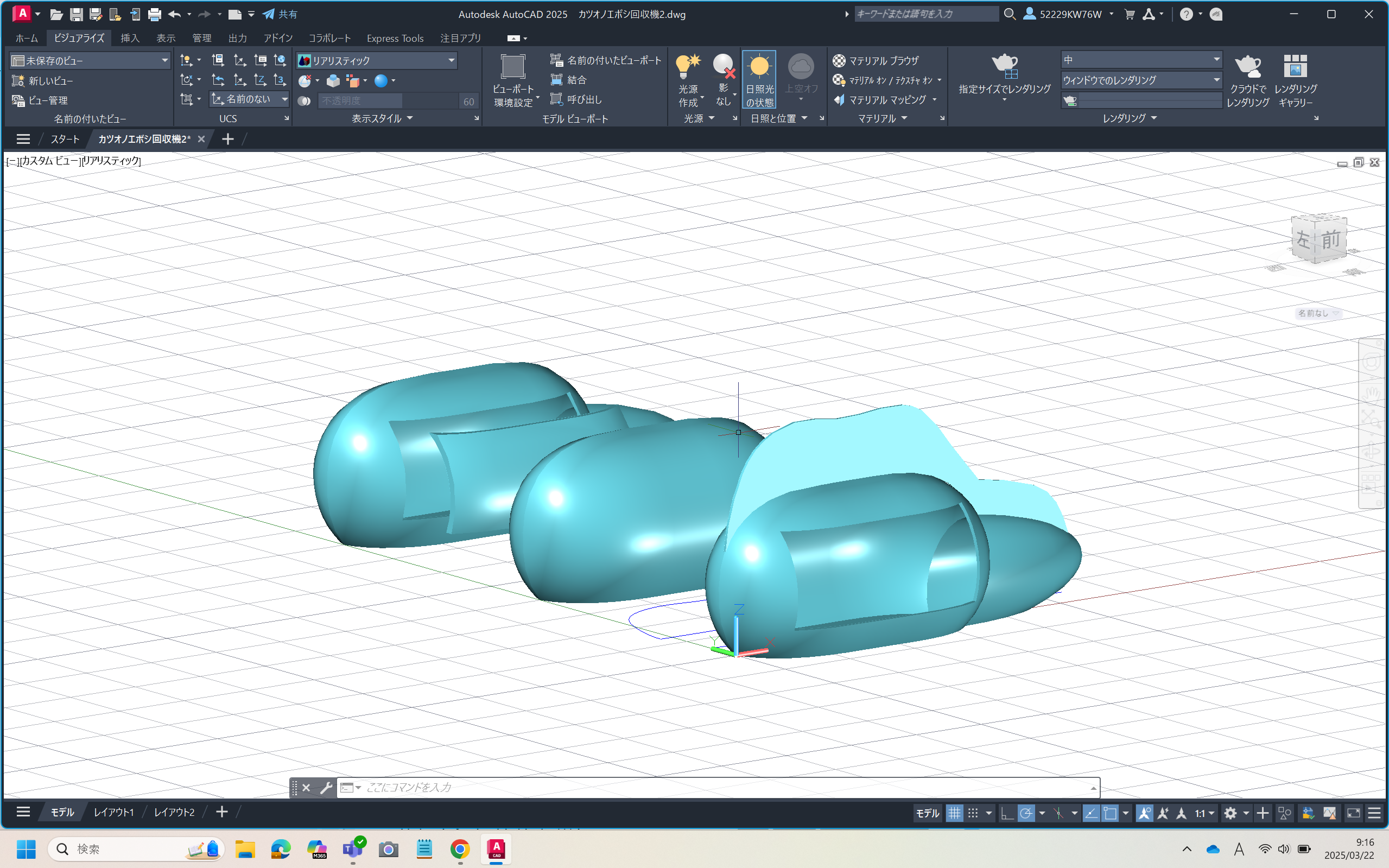
・カツオノエボシの浮袋のようなデザインをCADで設計
・局面が多く設計が難しいので、最初は断面図をいくつも作りそれらをつなげて設計しようと考えたが難しかった
・平面でいい感じに曲線を描き、その曲線を軸を決めて回転させて立体にできる機能を見つけ、これで設計することに
・砂がたまらないように、底抜きして回収機構で使った網を取り付けた
・ロボットと回収ボックスにネオジウム磁石をとりつけて、簡単に取り外せるようにした
エボトルンに込めた思い
「カツオノエボシをただの危険な生物ではなく、正しく知り、安全に共存できるようにしたい」
もともと私たちは、ロボットで地域課題を解決したいと考えていました。 そして、インタビューを通じて「知らないから刺される」という問題があることを知りました。
そこで、エボトルンには 「砂浜で回収する」に加え、「カツオノエボシへの理解を広げる」 という役割も持たせました。 見た目をカツオノエボシ型にし、興味を引くことで、ただ危険な存在として扱うのではなく、正しい知識を知るきっかけを作りたかったのです。 このロボットが、カツオノエボシとの新しい関わり方を生み出し、事故を減らすことにつながればと考えています。
もともと私たちは、ロボットで地域課題を解決したいと考えていました。 そして、インタビューを通じて「知らないから刺される」という問題があることを知りました。
そこで、エボトルンには 「砂浜で回収する」に加え、「カツオノエボシへの理解を広げる」 という役割も持たせました。 見た目をカツオノエボシ型にし、興味を引くことで、ただ危険な存在として扱うのではなく、正しい知識を知るきっかけを作りたかったのです。 このロボットが、カツオノエボシとの新しい関わり方を生み出し、事故を減らすことにつながればと考えています。
今後の展開
エボトルンは、カツオノエボシの回収と理解の促進を目的としていますが、現在の課題もあります。
たとえば、人が多いビーチではスムーズに動けないことや、QRコードをどれだけの人が実際に読み取るかといった点です。
今後は、混雑したビーチでも安全に動けるようにAIによる画像認識を導入することや、より多くの人に興味を持ってもらえるデザインや情報発信の工夫を進めていきたいと考えています。
最終的には、エボトルンが当たり前のようにビーチで活躍し、「知らなかったから刺される」という事故をなくすことを目指しています
たとえば、人が多いビーチではスムーズに動けないことや、QRコードをどれだけの人が実際に読み取るかといった点です。
今後は、混雑したビーチでも安全に動けるようにAIによる画像認識を導入することや、より多くの人に興味を持ってもらえるデザインや情報発信の工夫を進めていきたいと考えています。
最終的には、エボトルンが当たり前のようにビーチで活躍し、「知らなかったから刺される」という事故をなくすことを目指しています