従来

標準型OTTOは、こちらのサイトに詳細なinstructionがあります。
単純な構造で分かりやすい構造になっています。
一方で、足の組み立て・配線の順番等を間違えやすい、狭い場所のネジ締めが多い等に課題があると考えられました。(足首/FOOT、足全体/LEG)
実際、未経験の大人でも製作にかなり時間を要することも事前に確認できました。
改良
前項の課題に対し、各所に改善を行いました。
これに伴い、ボディを全体的に大型化しています。
以下、順番に紹介します。
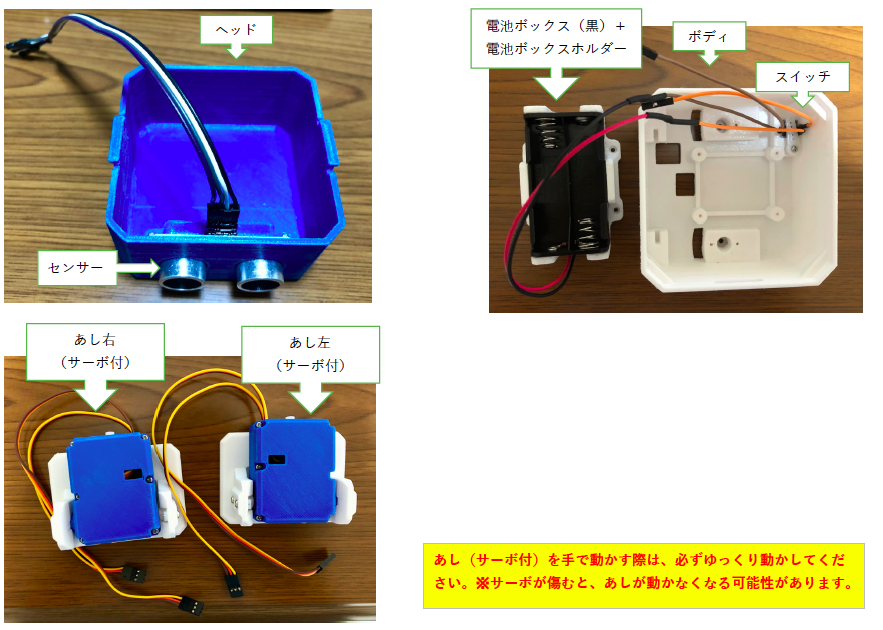
FOOT・LEGのサーボモータをLEG内に集約
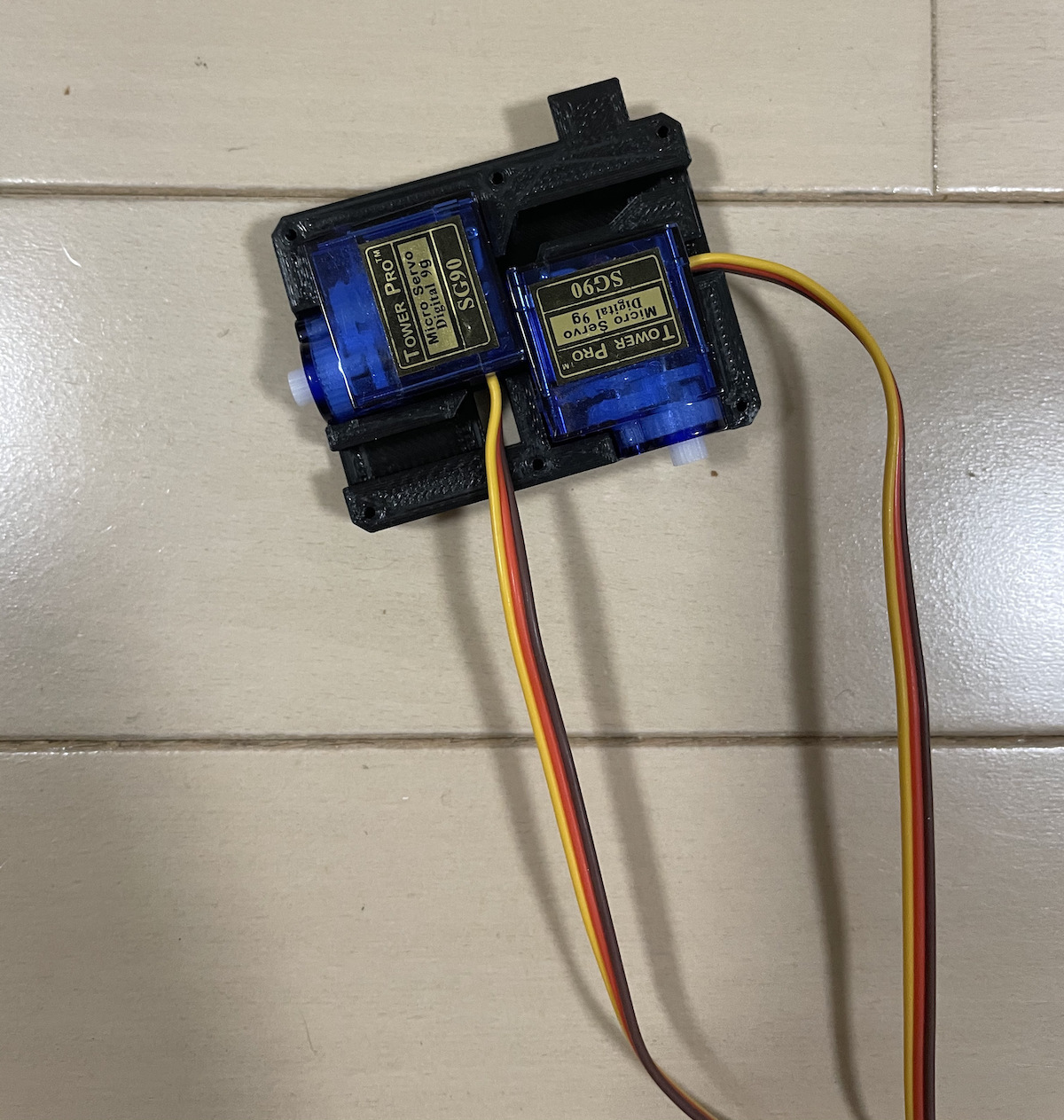

FOOTのサーボはBodyに、LEGのサーボはFOOTに搭載されていたところを、両方のサーボをFOOTに搭載することで、FOOTをモータ部品を搭載したユニットとしました。
FOOTへのモータ固定を嵌め込み式にしたことにより、ネジ止め箇所を減らし、組み立てを容易にしました。
(ただし、SG90のネジ止めフランジをニッパー等で切っておく必要があります。)
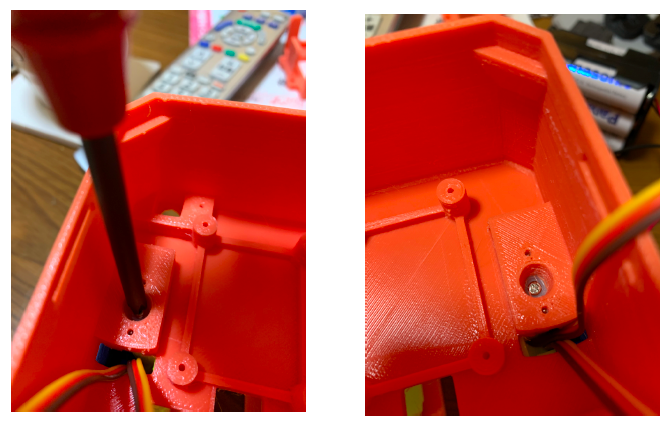
超音波センサ固定具の追加

超音波センサ基板をHEADの穴に通した後、基板固定するパーツを追加し、安定化させました。
HEAD側に搭載していたArduino NanoはBODY側へ移植し、分解時に修理が容易となるようにしました。
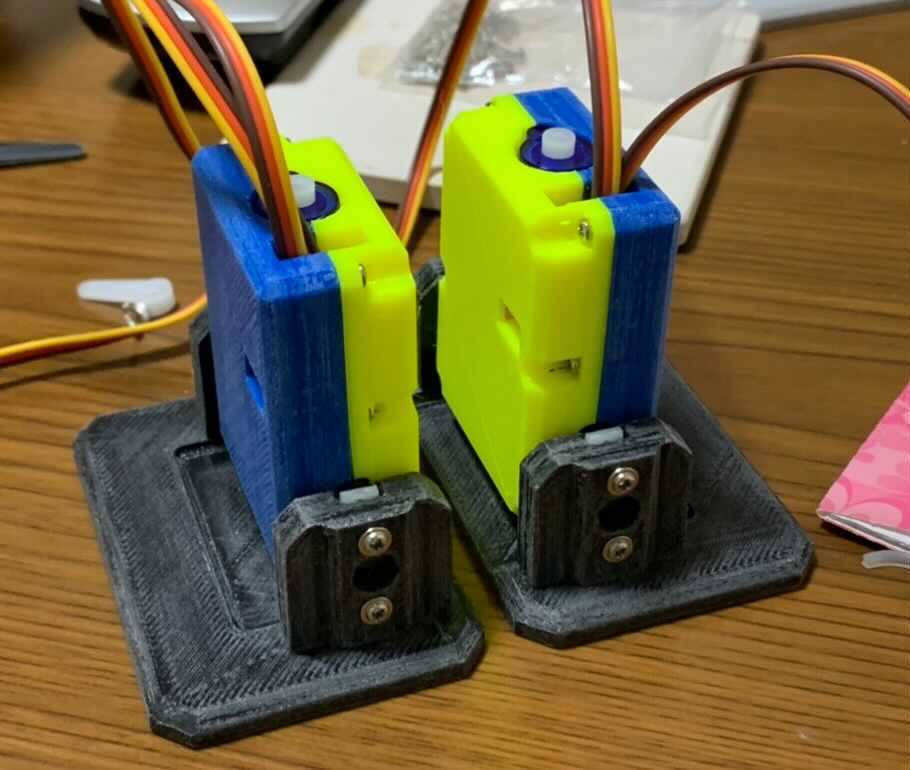
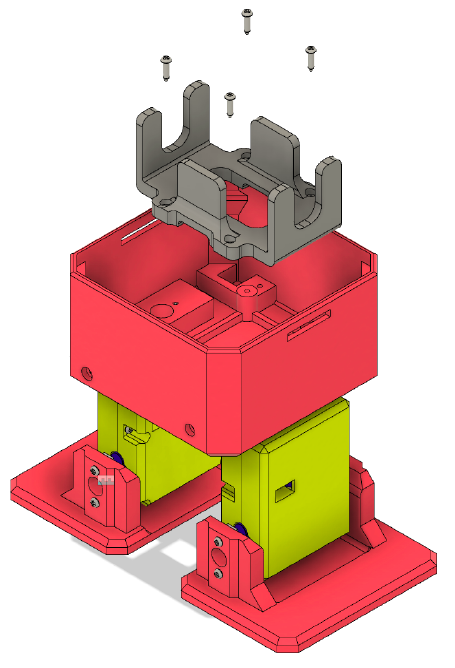
LEGモータのサーボホーンをBODYに移設

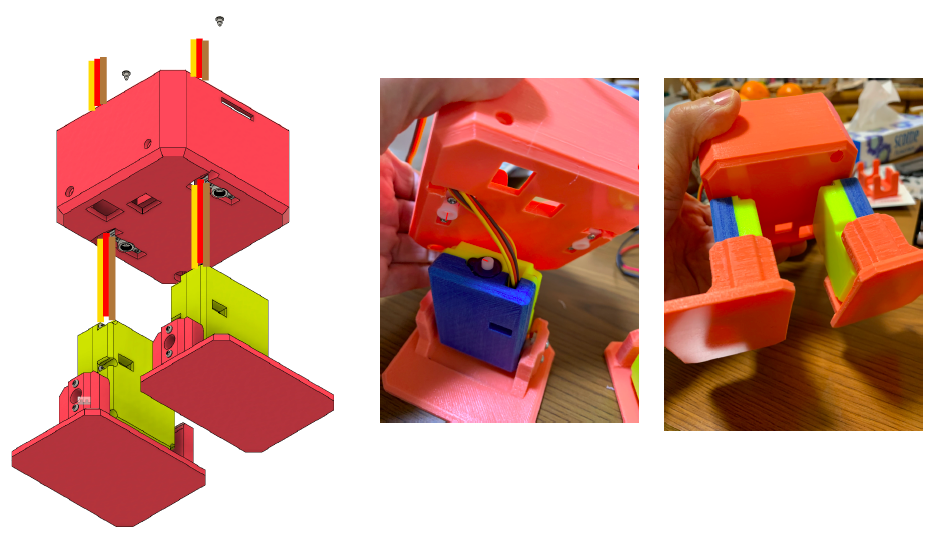
LEGモータ用のサーボホーンをボディ側に移設しました。
モータユニットとボディの取り付け時は、
モータユニットの配線をボディの内側に通し、
サーボホーンとLEGモータの回転軸を嵌め込んだ上で、
ボディの内側からネジでホーンと軸を固定します。
基板レイアウトの変更
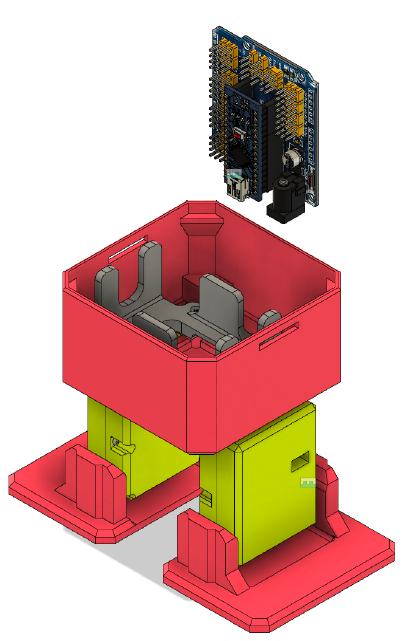
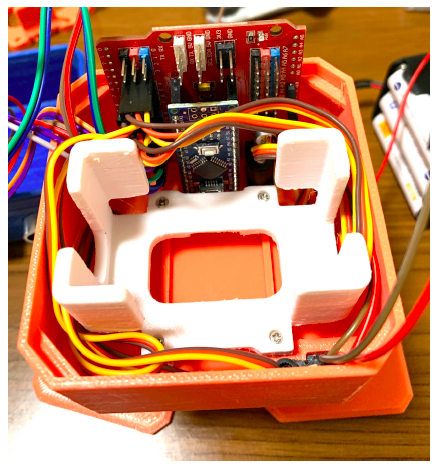
HEAD側に搭載していたArduino Nanoおよび拡張基板をBODY側へ移植し、
分解時に配線が広がりにくくすることで、修理が容易となるようにしました。
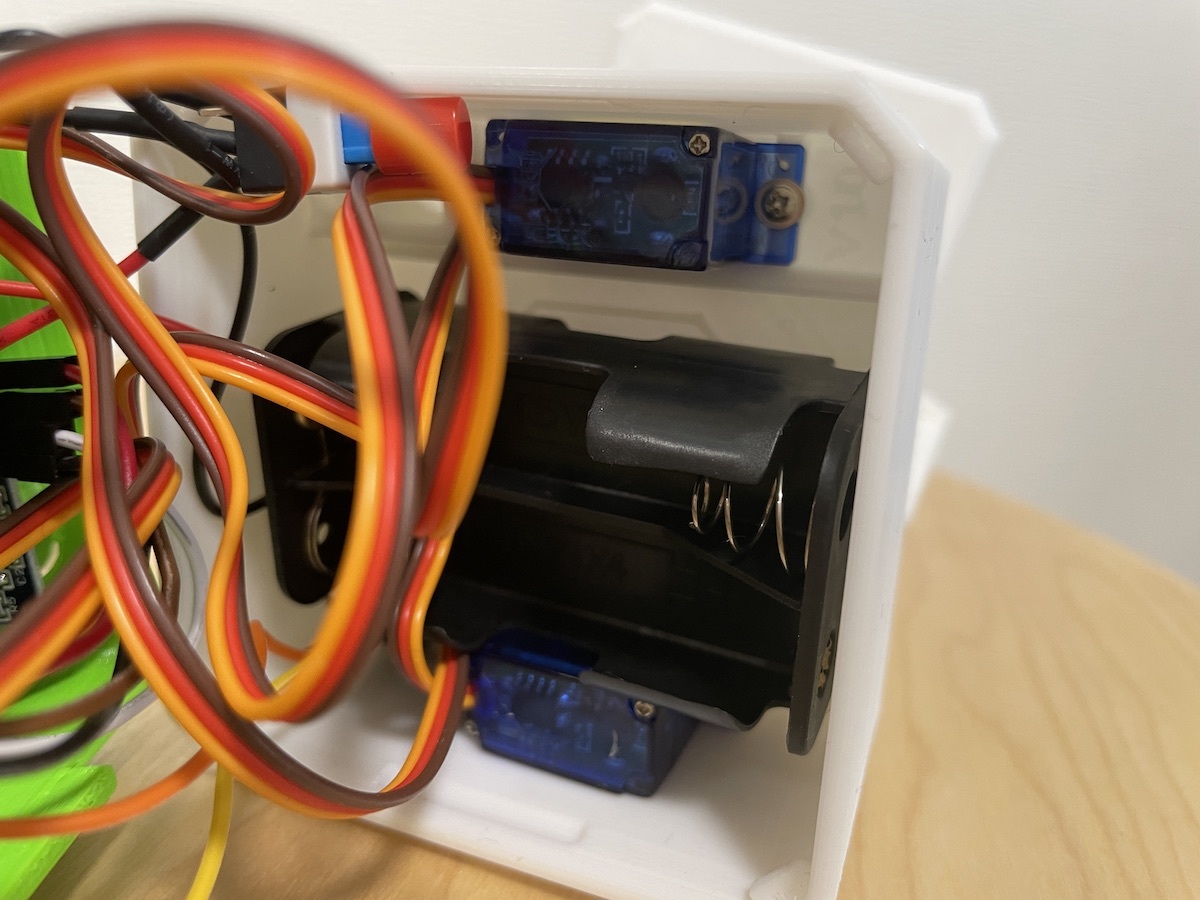
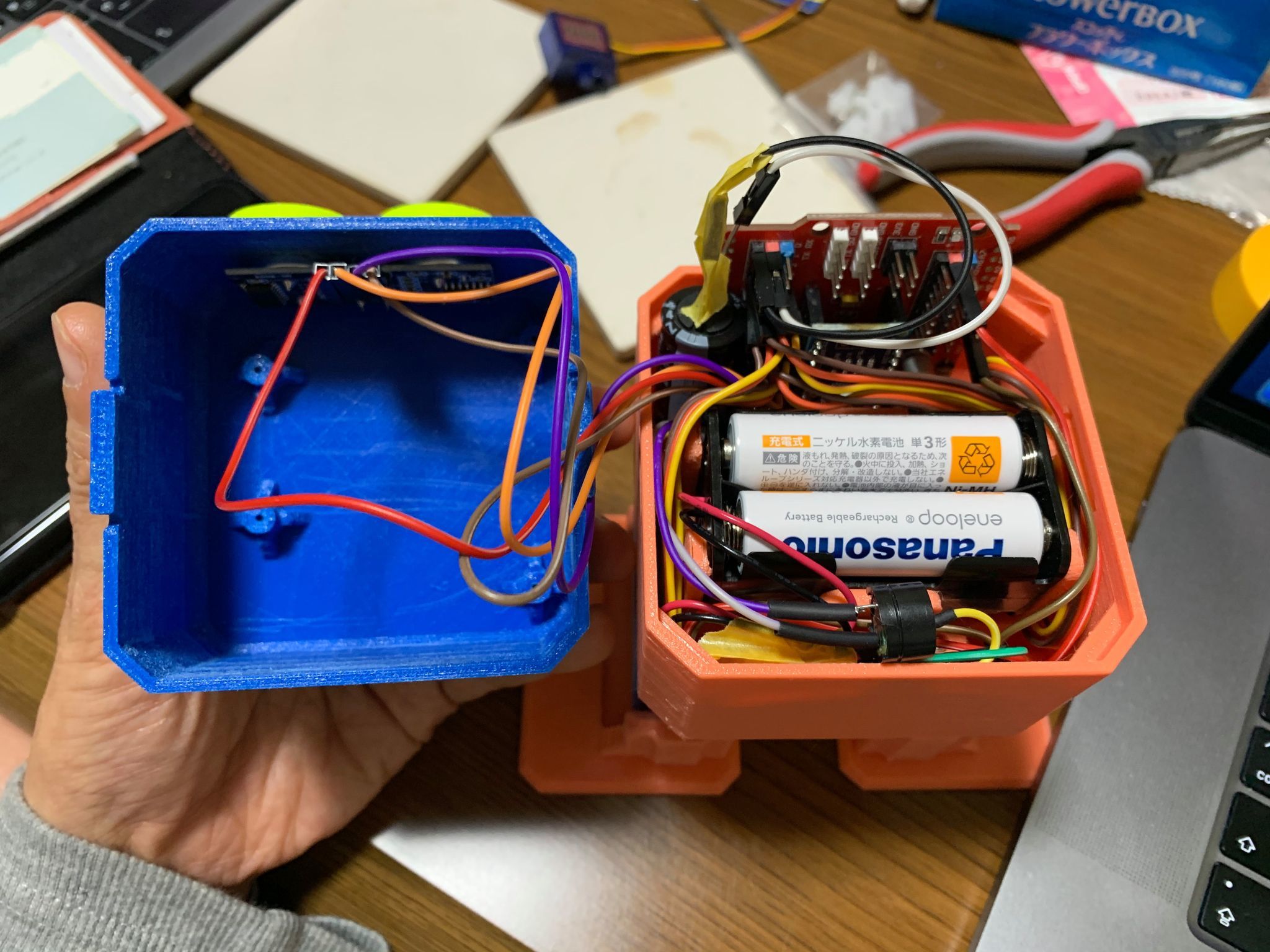
電池ボックスの固定ブラケット追加
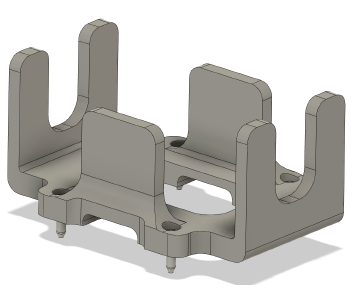
電池ボックスは既製品の単3乾電池2x2本レイアウトの電池ボックスがホールド可能な電池ボックスを新たに設計しました。
完成図
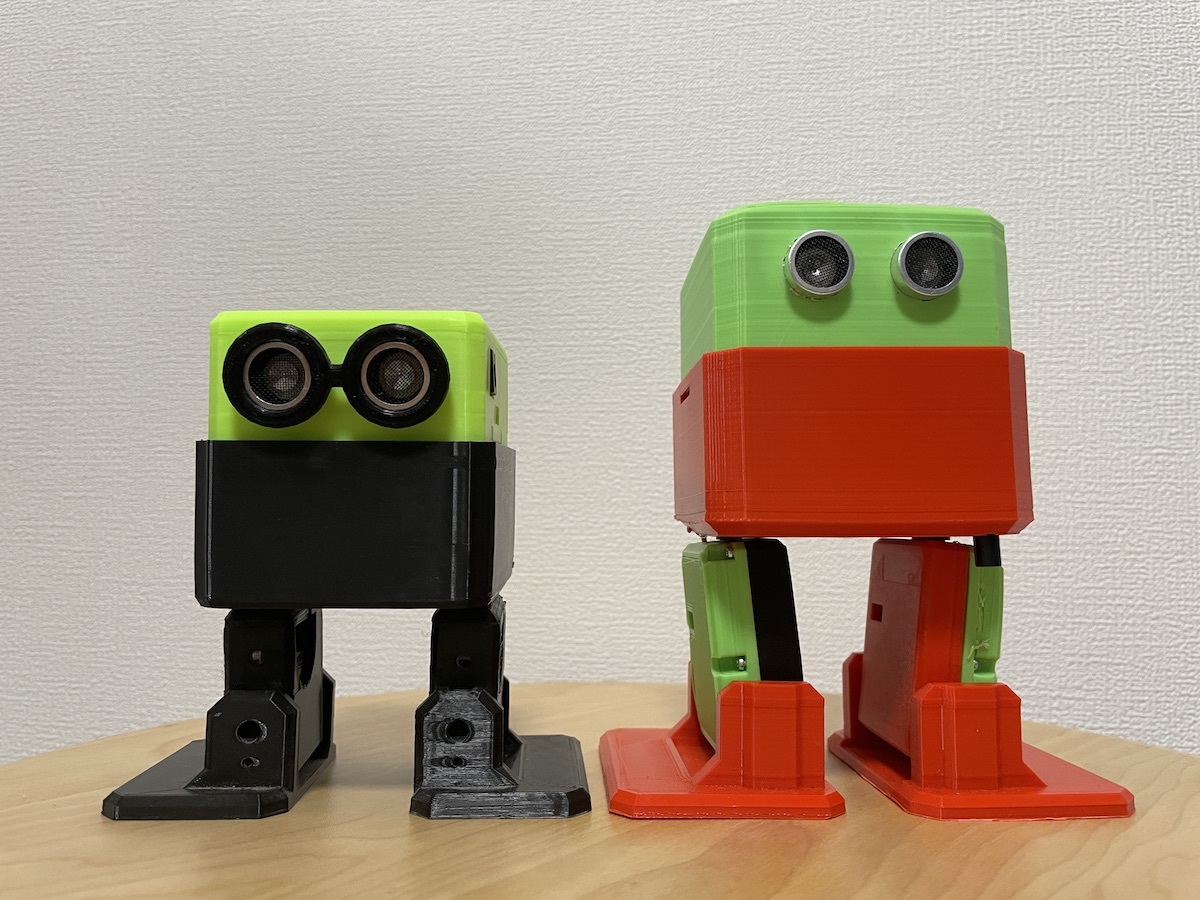
従来OTTOと対比した写真。従来に大して一回り大きくなっています。
ワークショップ振り返り

概要に記した通り、このOTTOデザインを使い、兵庫県豊岡市市民課殿および豊岡市工業会殿と共に、豊岡市の小中学生を対象としたワークショップを実施しました。ただしコロナ禍につき、講師が豊岡市へ移動自粛を余儀なくされ、Zoomを使った遠隔ワークショップの形となりました。
容易性を追求した設計でしたが、未だ一部の子供には難易度が高く、更なる改良が必要な箇所が認められました。また、子供ごとの慣れ不慣れの差は大人以上に大きい事も実感しました。
今後の参考としていきたいです。