1. ゴミの3Dスキャン

Makerbot DigitizerとSENSE 3D Scannerを通じて、3Dスキャンを行う。
今回は、
・ポンジュース 500ml(ペットボトル)
・鼻をかんだ後のティッシュ ×3
・コンビニで貰ったポリ袋
・チラシ
を3Dスキャンした。
2. ゴミの3Dプリント

上記の工程を経てスキャンされた3Dデータを、3Dプリントする。
右図の通り、サポート材が残ってしまったゴミや、途中で噴出口がズレてしまい上手く出力できなかったゴミもあるが、むしろそのようなエラーは、ゴミのゴミたり得る性質の認識をより曖昧にする。よって、今回はこのエラーを生かすことにする。
3. Arduinoを用いて、ゴミを載せた小型車を作る
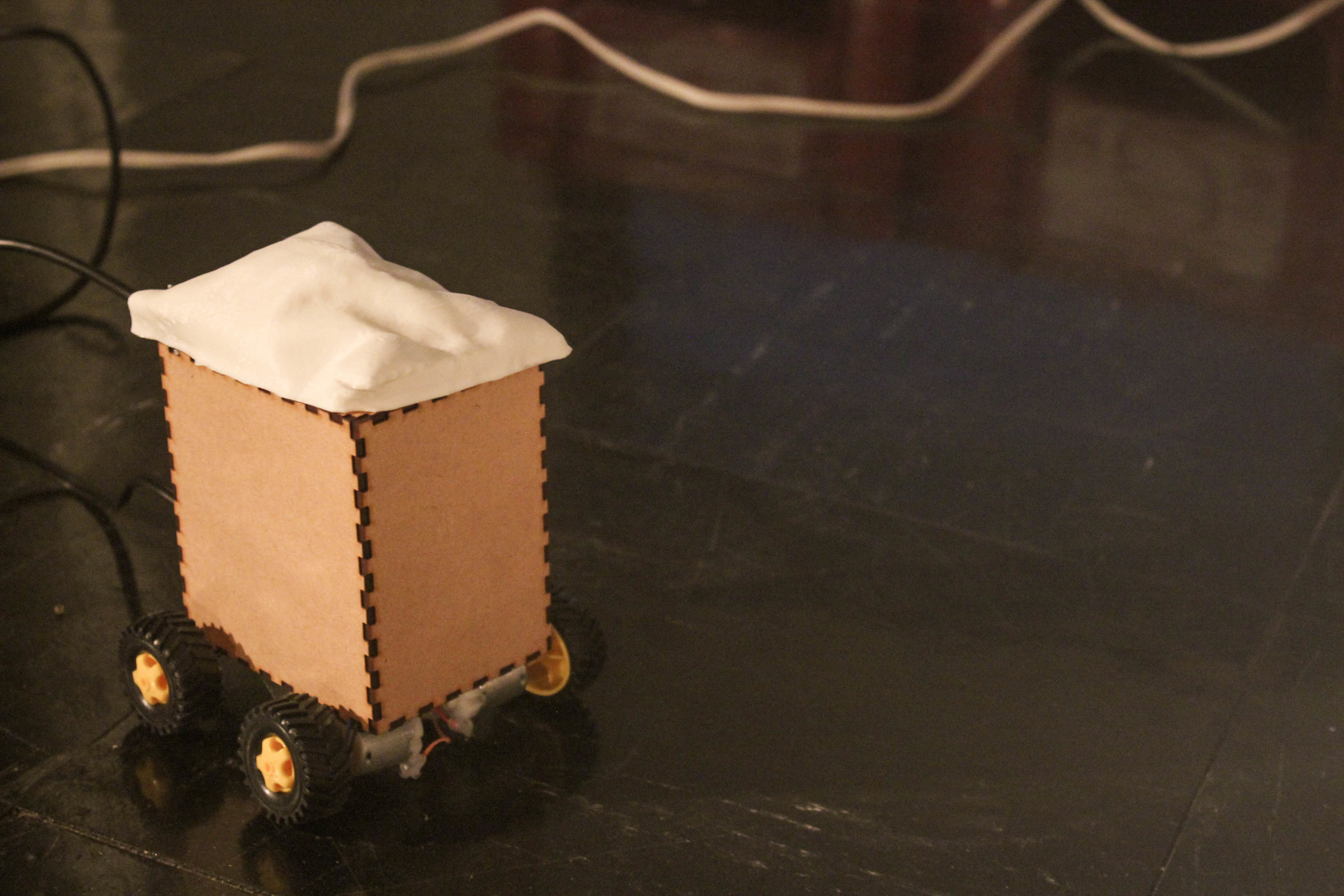
ゴミと作品の中間となるモノを作るべく、小型車に近づくと、車輪がとてつもない勢いで回転し、ゴミが反抗する、という機構を作りたいと考えた。
距離センサとサーボモータの配線をする
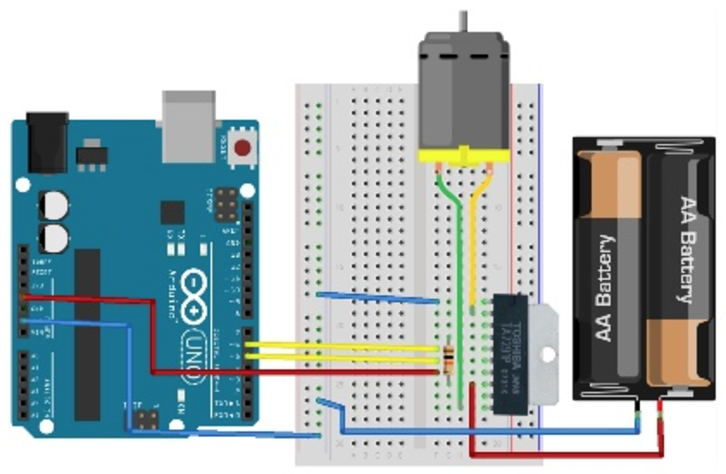
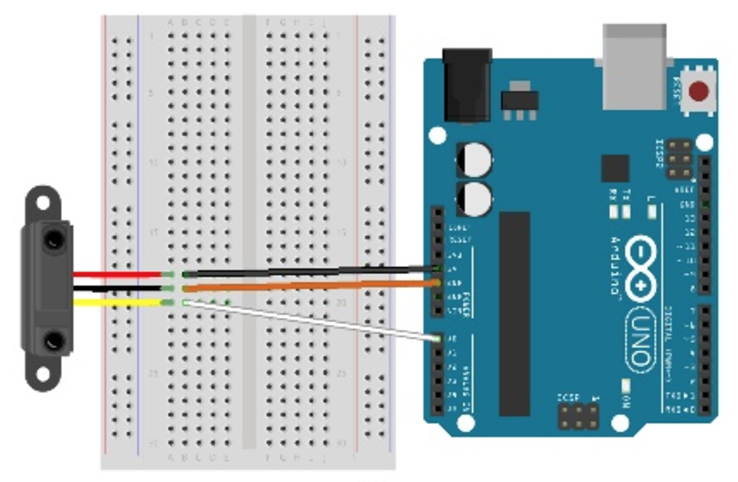
平原真氏が提供する資料をもとに、Arduino UNOとブレッドボードを用いて、距離センサとサーボモータの配線を行う。
今回は、
・シャープ測距モジュール GP2Y0A21YK
・DCモータ FA-130RA-2270
を使用した。
4. ストリートビューを用いた映像を作る
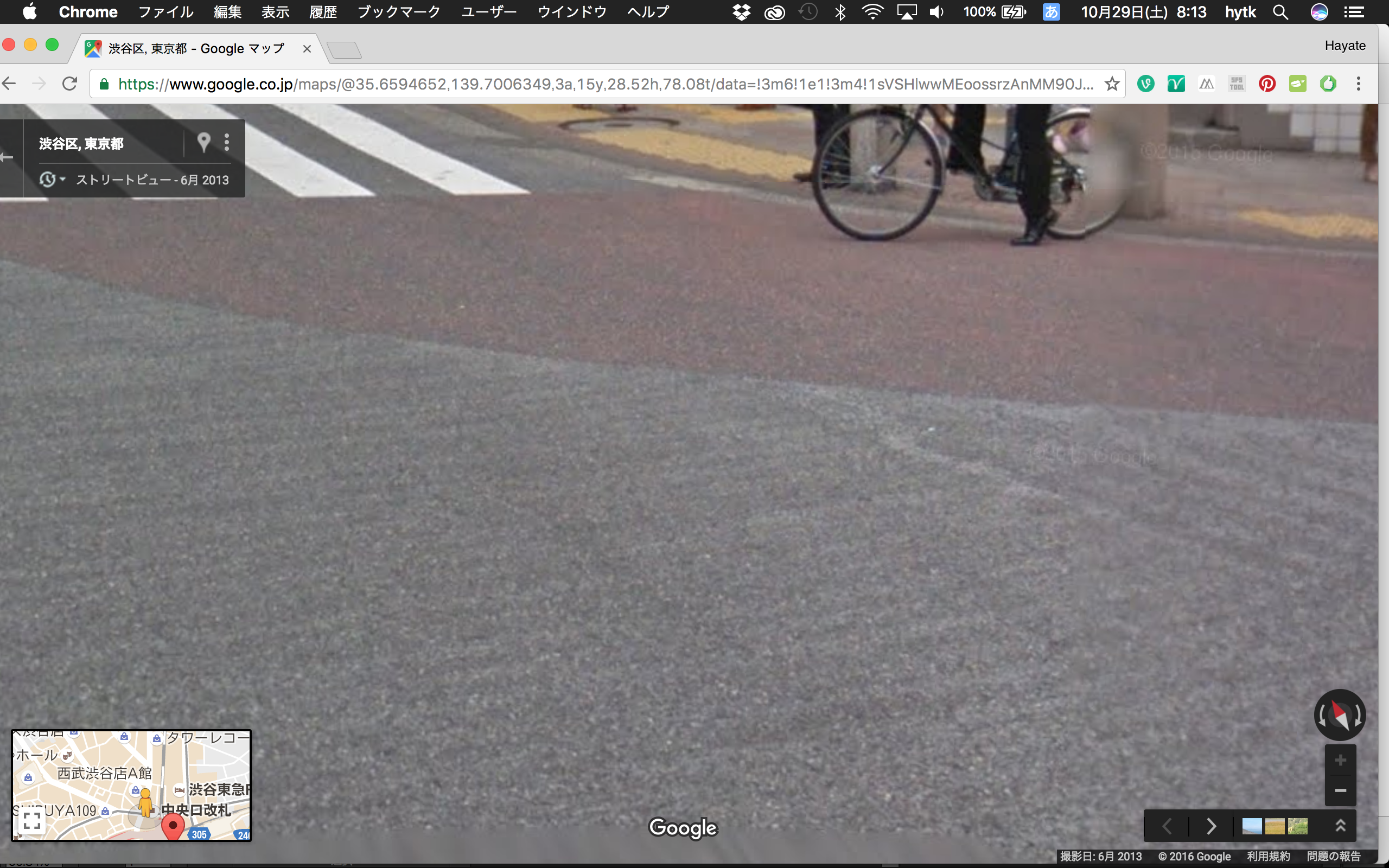
ゴミは、ゴミの置かれた状況によって、ゴミと見なされるか否か、認識が変わりうるのではないか。ゴミに<状況>を与えるために、Google ストリートビューを用いた映像を制作した。
今回は、
・西東京 保谷駅周辺
・渋谷 スクランブル交差点周辺
・イタリア ミラノ ドゥオーモ周辺
・オーストラリア ビクトリア州 Wattle Creak 周辺
の四箇所の地面を、スクリーンショットを行い収集し、映像化した。
5. 展示をする
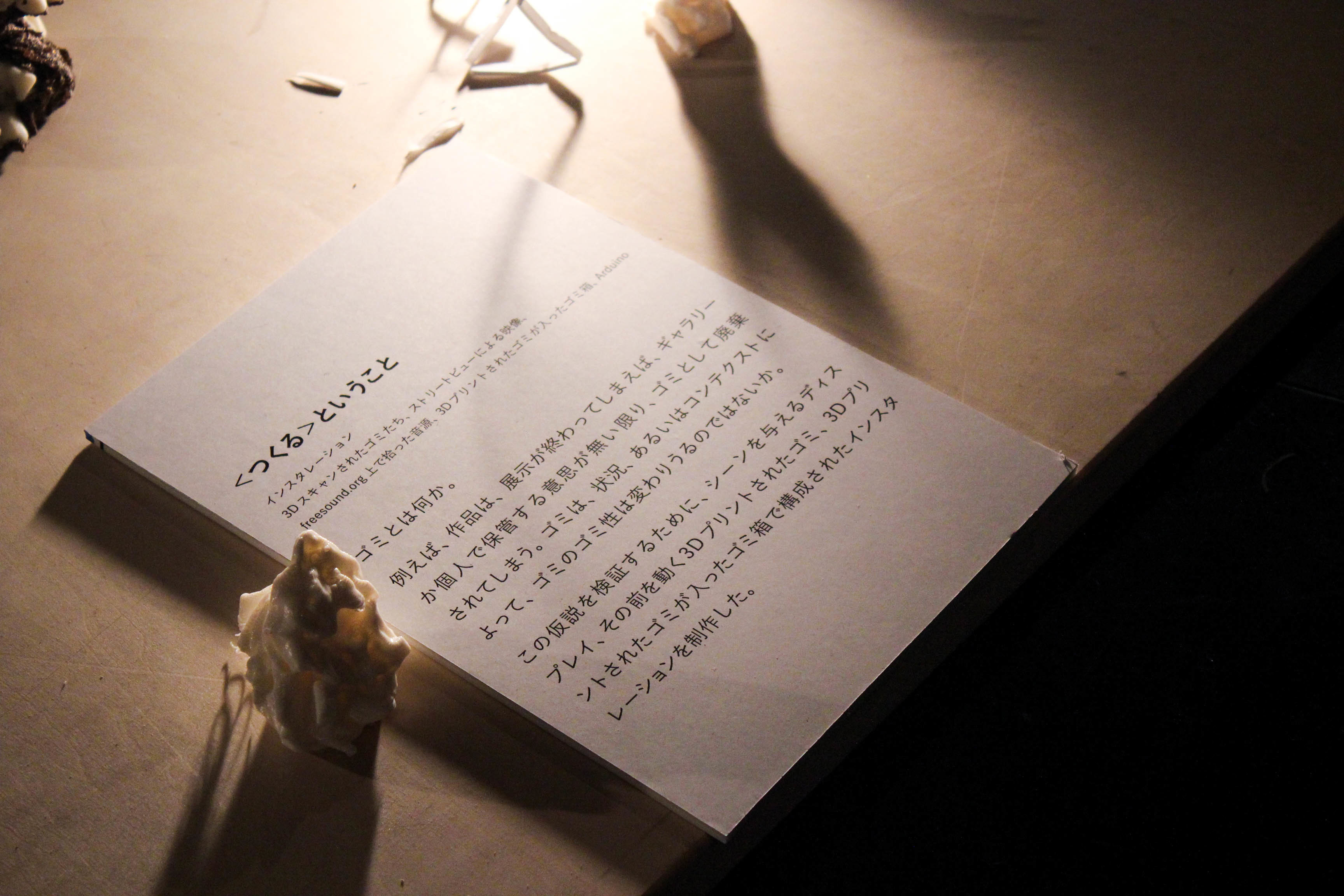
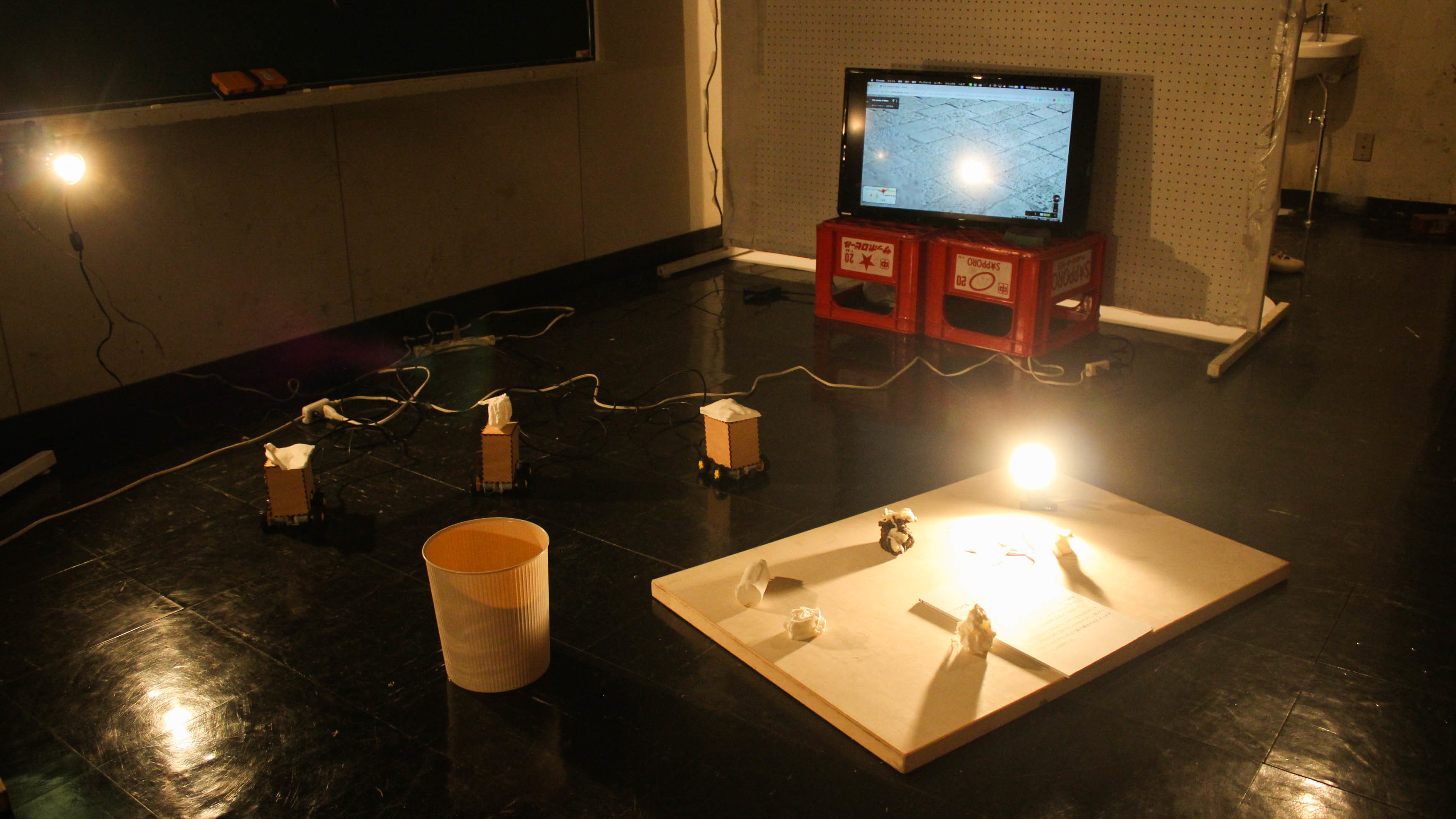
キャプションとライト、ストリートビューの映像を映すディスプレイ、3Dプリントされたゴミを入れたゴミ箱、3Dプリントされたゴミを載せた小型車、3Dプリントされたゴミ(エラーがあるものも含む)で構成する。
ゴミがゴミでないように見えてしまう、作品として映えてくるかのような構成を目指した。
しかし今回出力したモノ自体は、後々捨てられる。
では私は作品を作っていたのか、それともゴミを作っていたのか、という問いが生まれてしまう。