箱のかたちを考える
色々なセンサーを入れる箱のかたちを考えてみる。
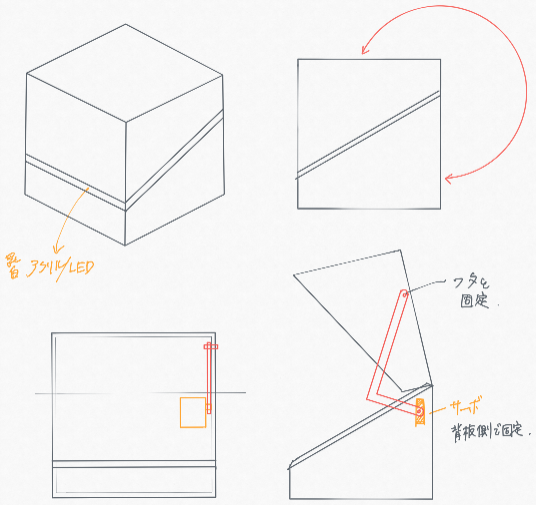
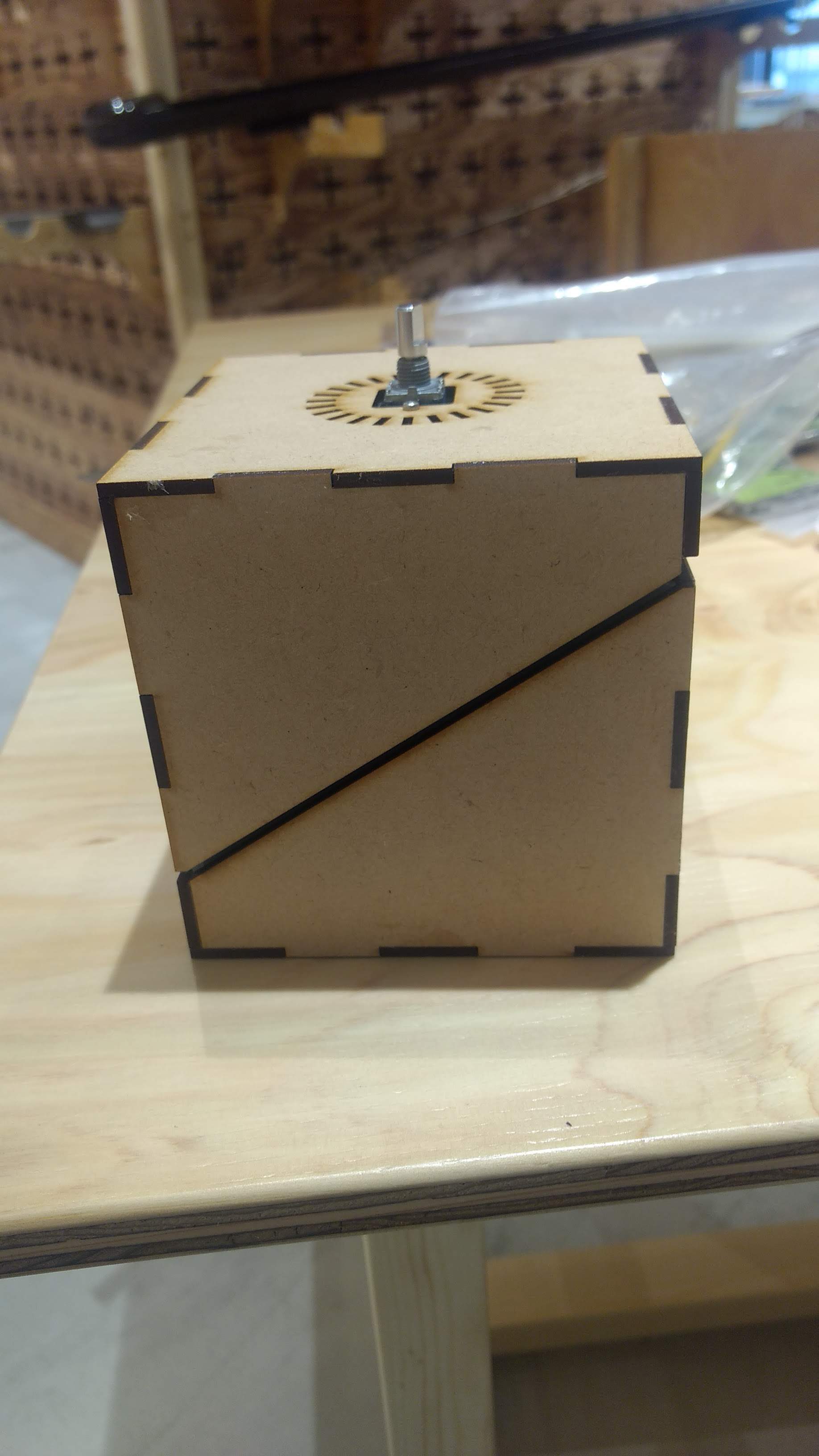
加工のことを考えたら、蓋と本体は真っ直ぐの方がいいけど、蓋が開くときのワクワク感を出したいし、LEDが光る演出も入れたいので、斜めにスリットが入った形状を考えてみた。
次はこの中にサーボ やセンサー、マイコン類を入れられるサイズをFusion360で検証しつつ設計する。Arduinoやmicrobit やM5Stackなど複数のボードを使用するつもりだが、入れるものによってサイズは変えたくない。
3Dでシミュレーション

Fusion360を使ってサイズや構造を検討する。
設計できたら3DからDXFに書き出してレーザーカッターでカットできるようにする。
Arduino Unoが入るサイズ
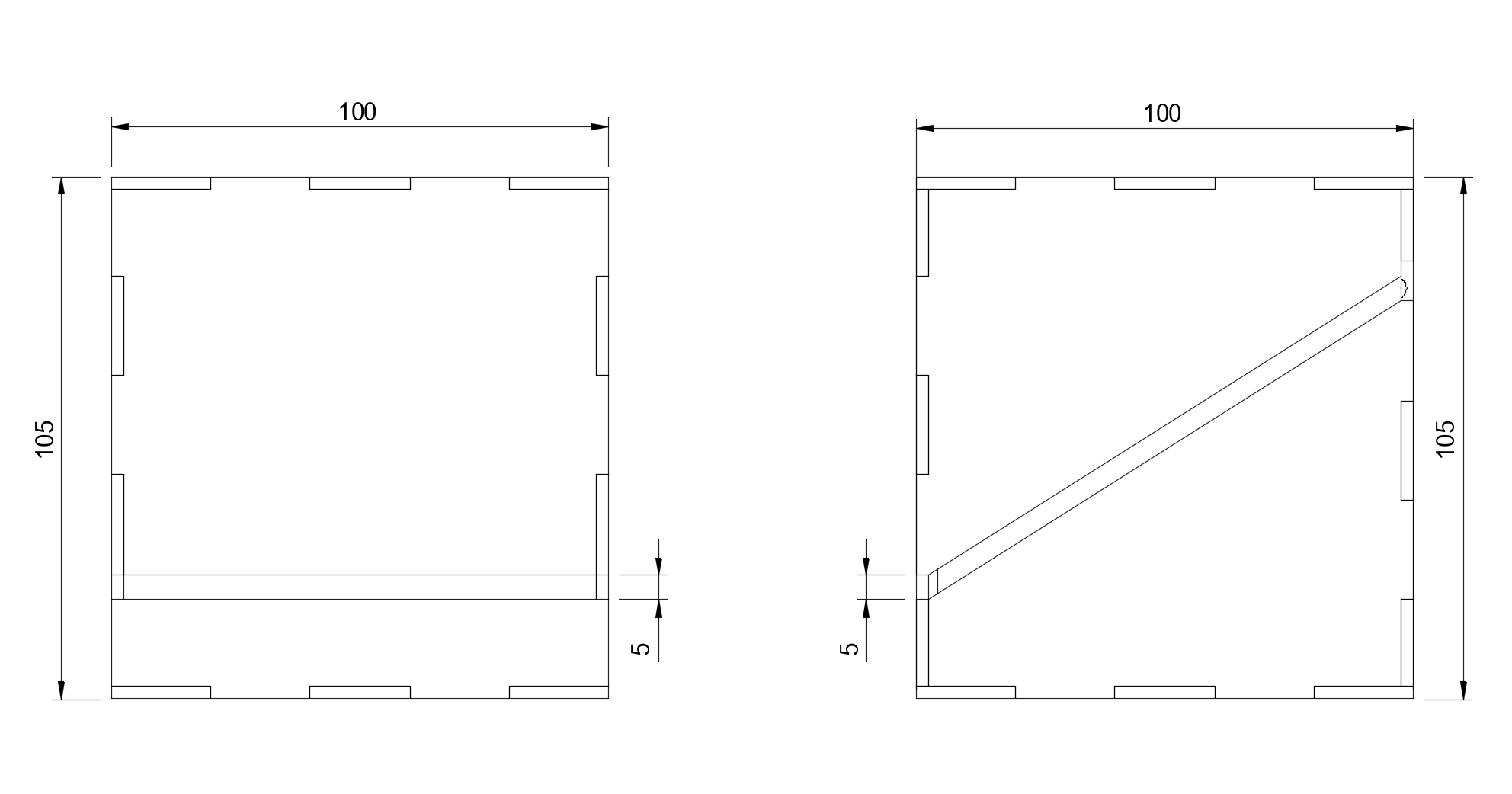
今回使うボードの中で一番大きいのはArduinoUnoなのでそれにサイズを合わせる。実際にギャラリーに落ちていたArduino Unoのモデリングデータをインポートして確かめつつ、サイズを確定させる。
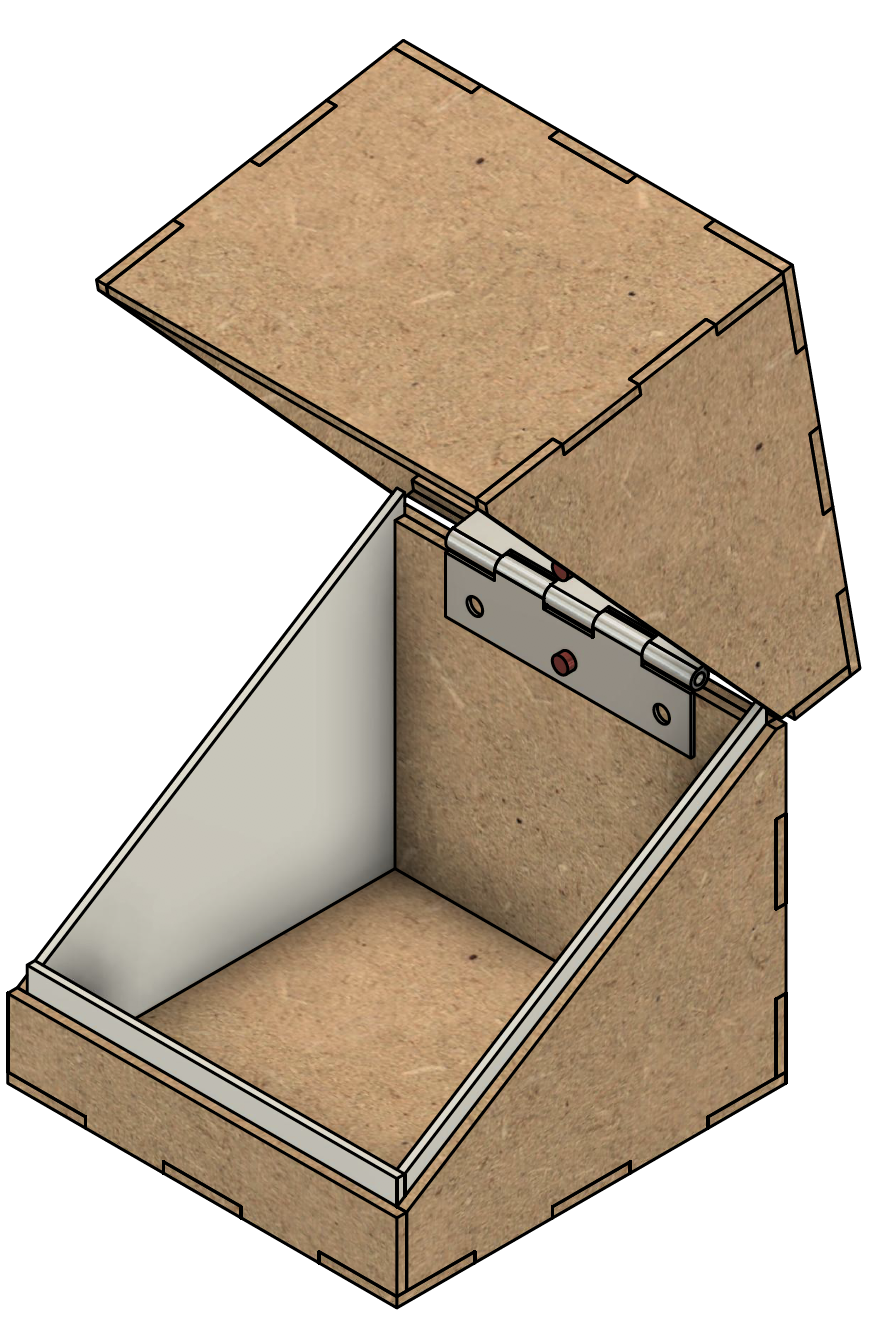
蝶番もモデリング
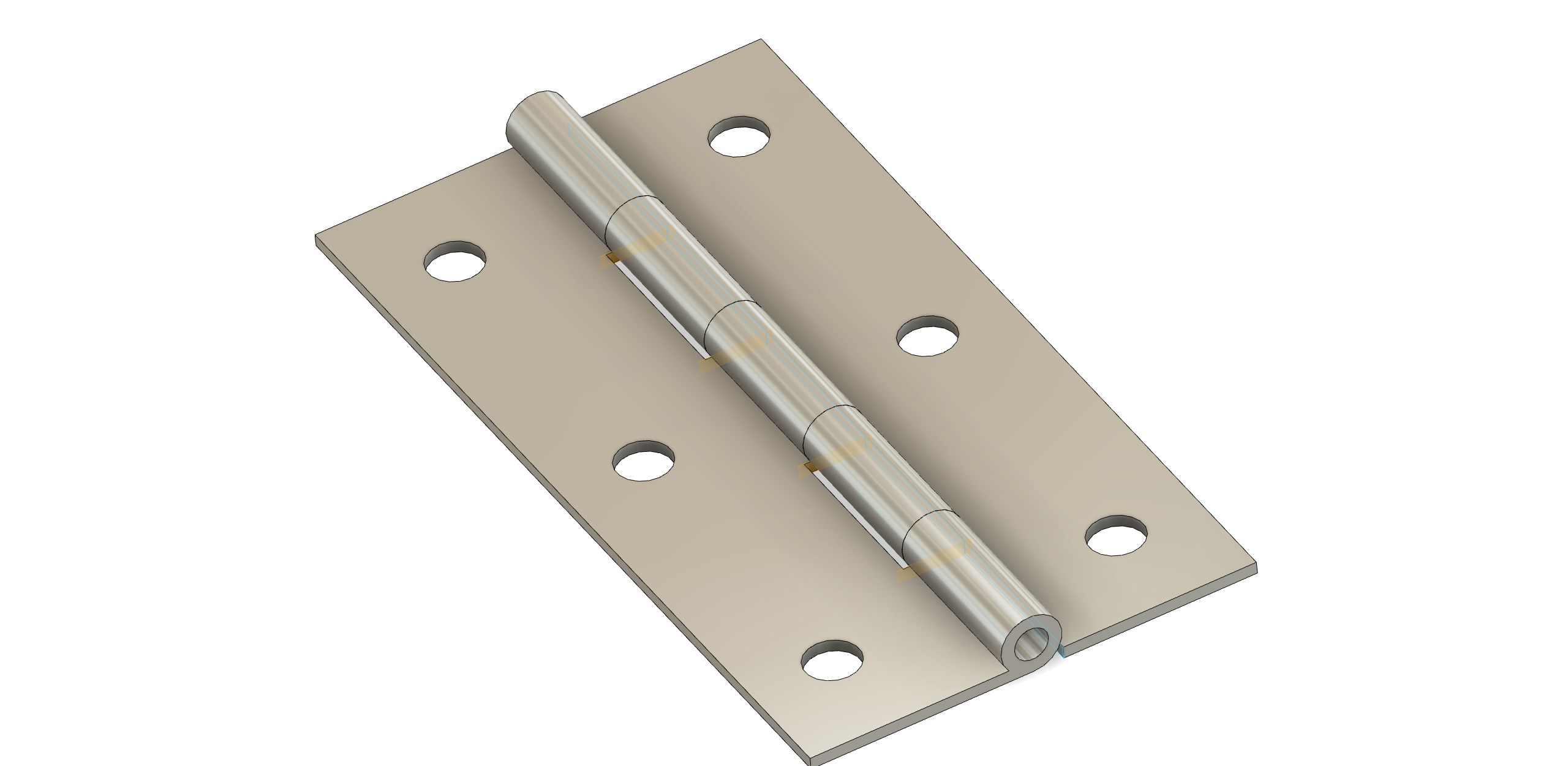
割と蝶番の位置をちゃんと決めないとあとでうまく開かなかったりするので、蝶番もモデリングしてシミュレーションする。
蝶番の取り付け位置と回転の確認
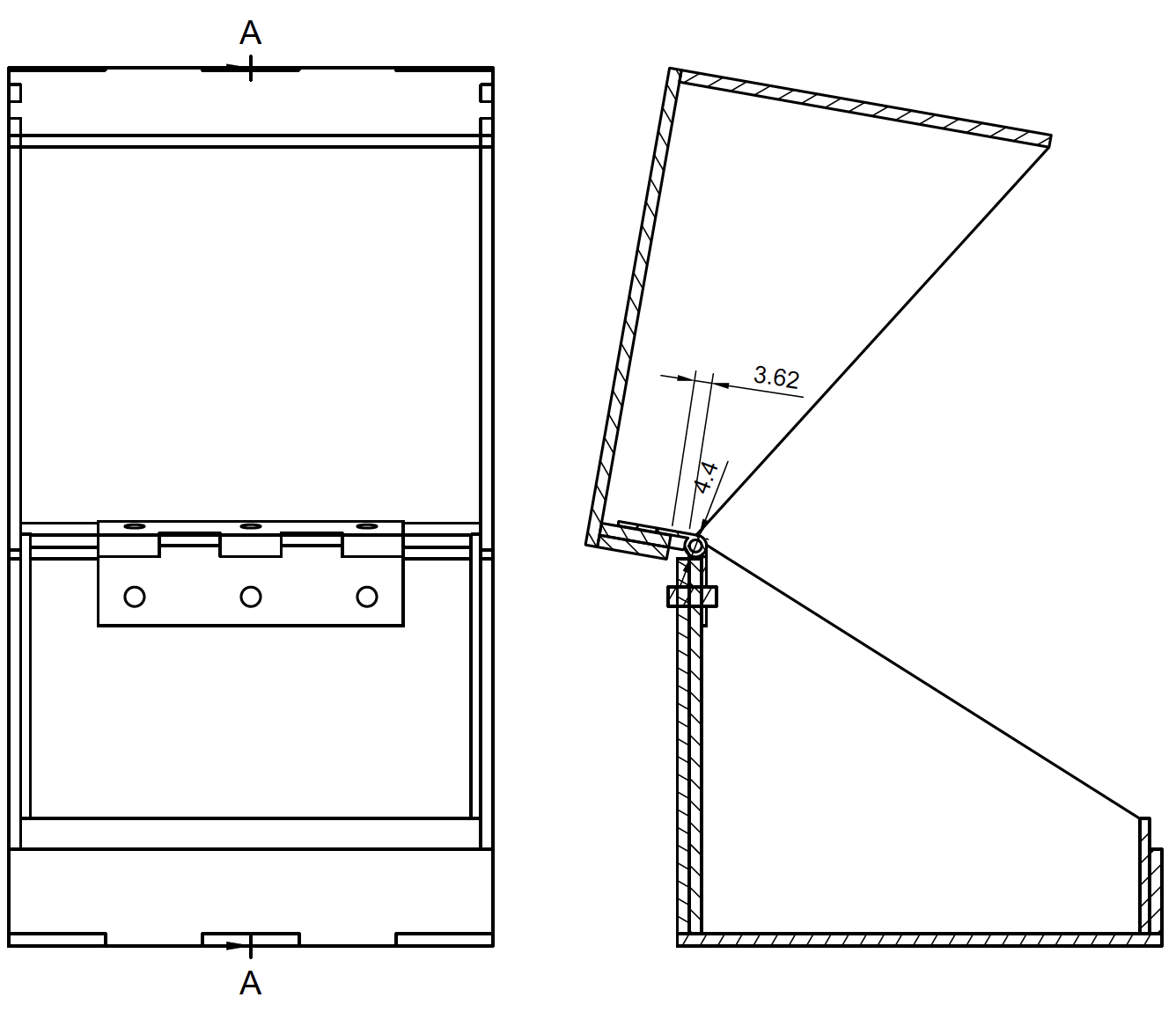
今回は複数個同じものを作るので割としっかり設計してみる。
内部構造
スリット部分は半透明のアクリル板にしてLEDテープを内側で点灯させる。LEDテープの固定には課題が残るがとりあえず1つ作ってみてから考えることにする。
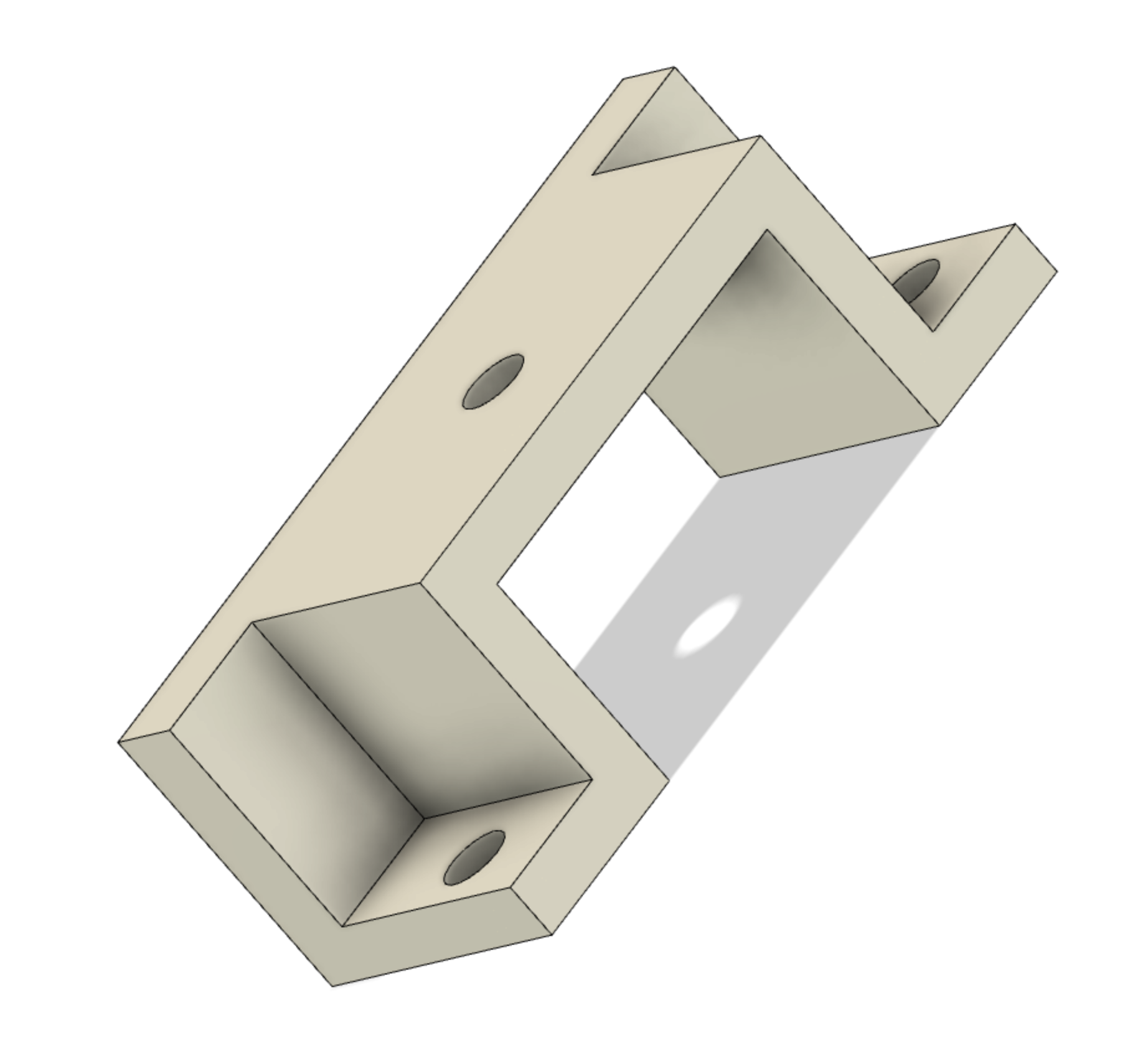
サーボ の固定
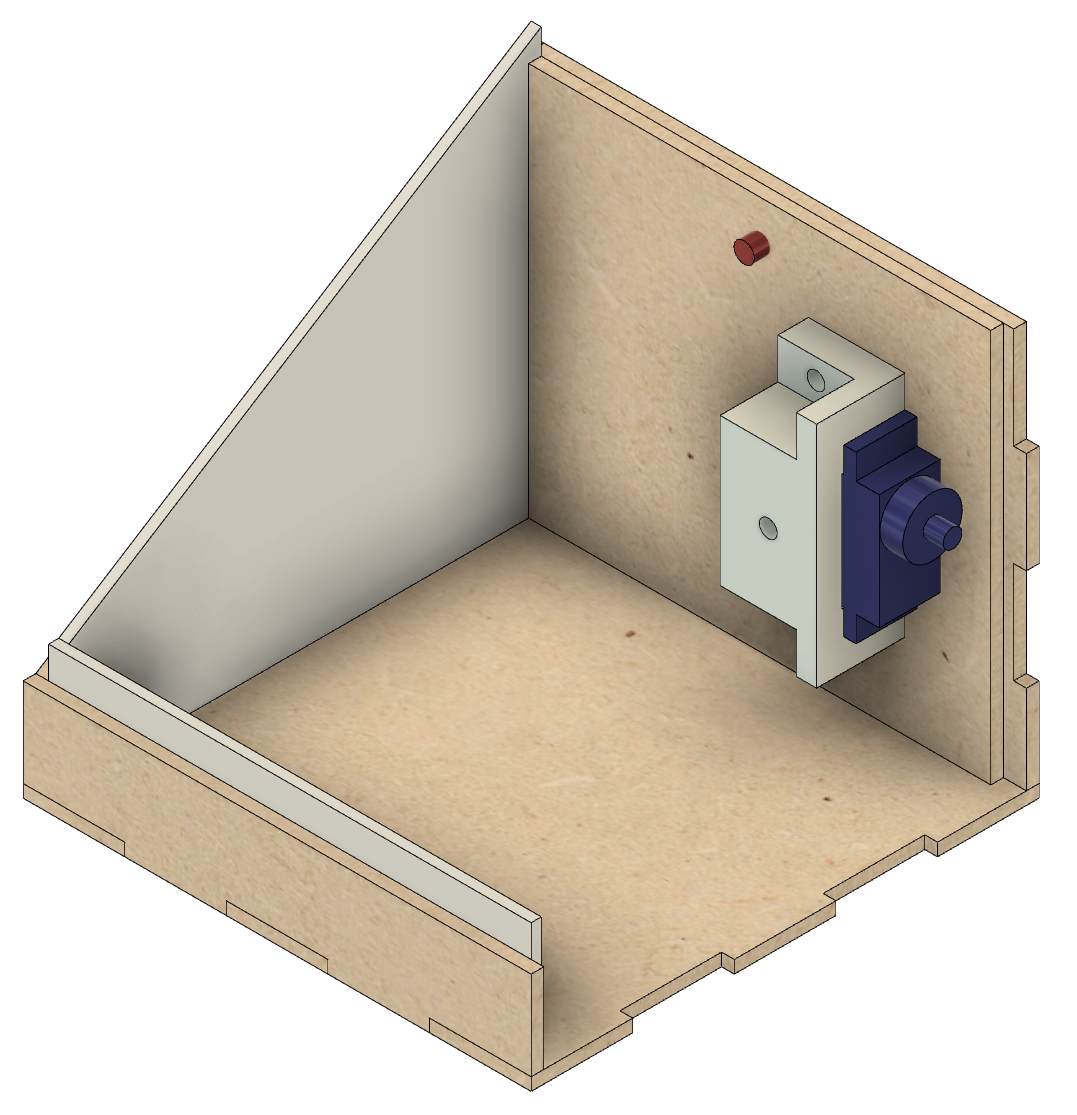
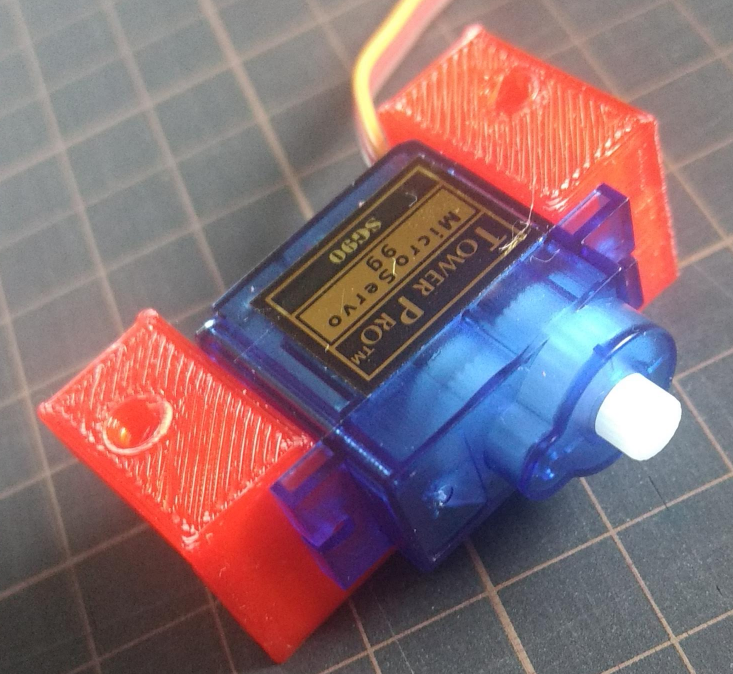
サーボはいつも取り付けに苦労するので今回はサーボマウントをモデリングして3Dプリントしてみることに。MDFは穴あけ加工しやすいので1個目を作ってそれから穴位置を図面に反映させる。
今回使うサーボ はマイクロサーボ のSG90。
蓋をあける機構
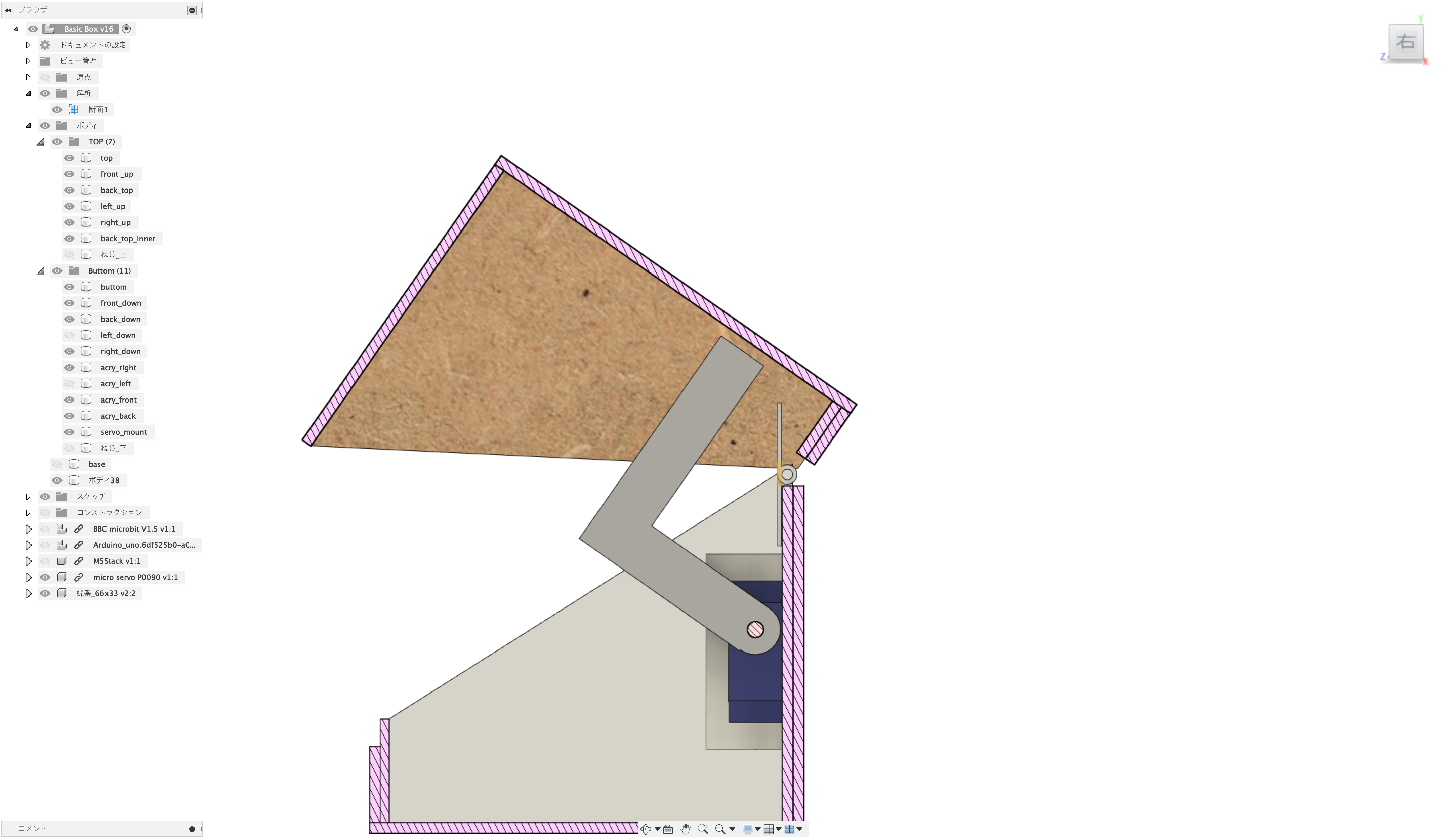
サーボ にアームをつけて押し上げる簡単機構なのだが、蓋が開かないようにするには蓋とアームを固定しなければなのだが、回転軸が異なるので蓋とアームの固定位置が角度によって異なるのでスライドするようにしなければダメそう。。でもちょっとやってみないと分からないからそれは後回しに。
平面に展開
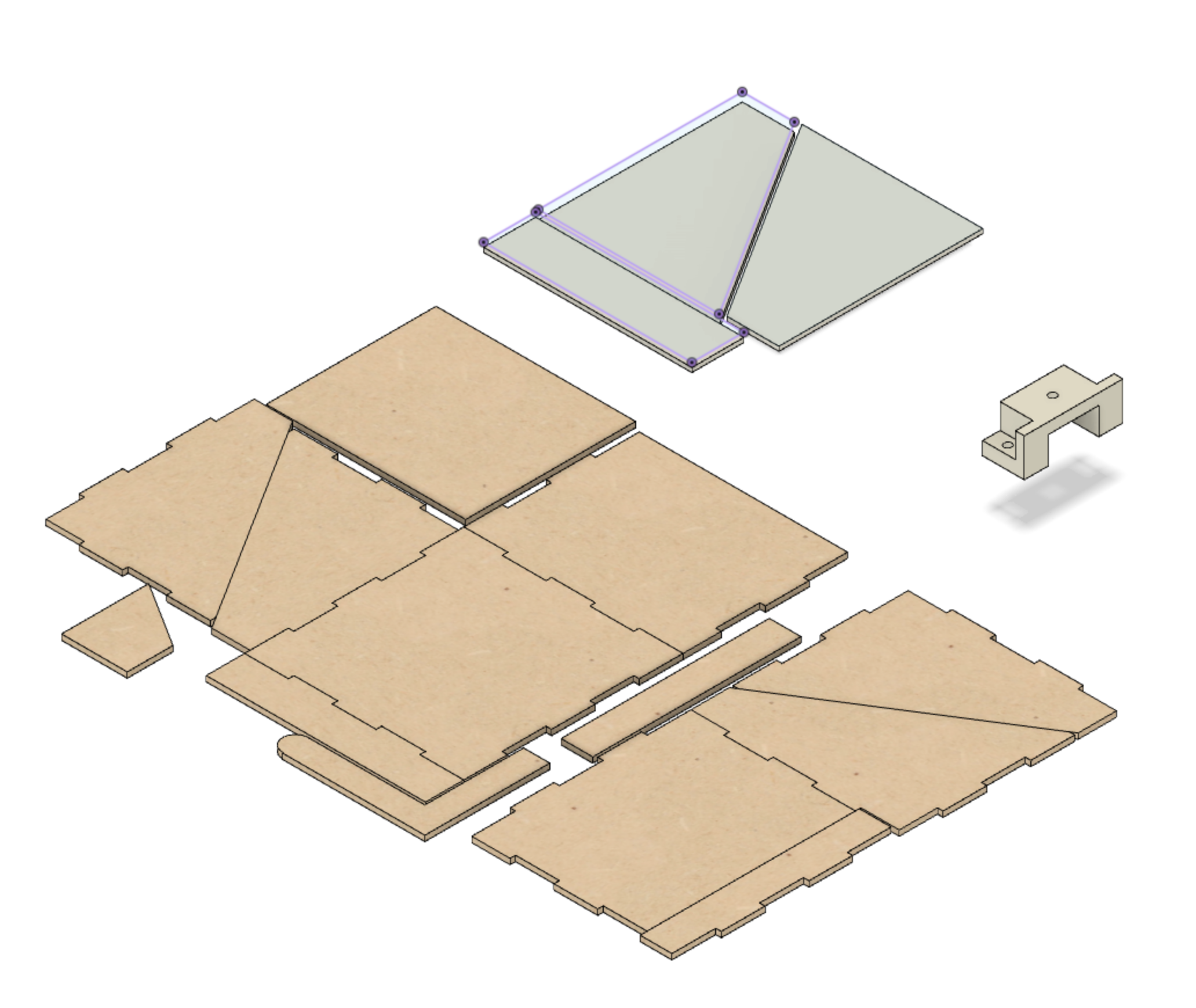
さてこれで大体シミュレーションも出来たのでレーザーカッターで出力できるように各パーツを全部平面に並べ直す。これが面倒で一番嫌いな作業。。でも間違えると台無しになるから集中してやらなきゃいけない作業でもある。今回は、MDFとアクリルは別でDXFで保存。サーボ マウントはMakeから3Dプリントに。
Illustratorで微調整
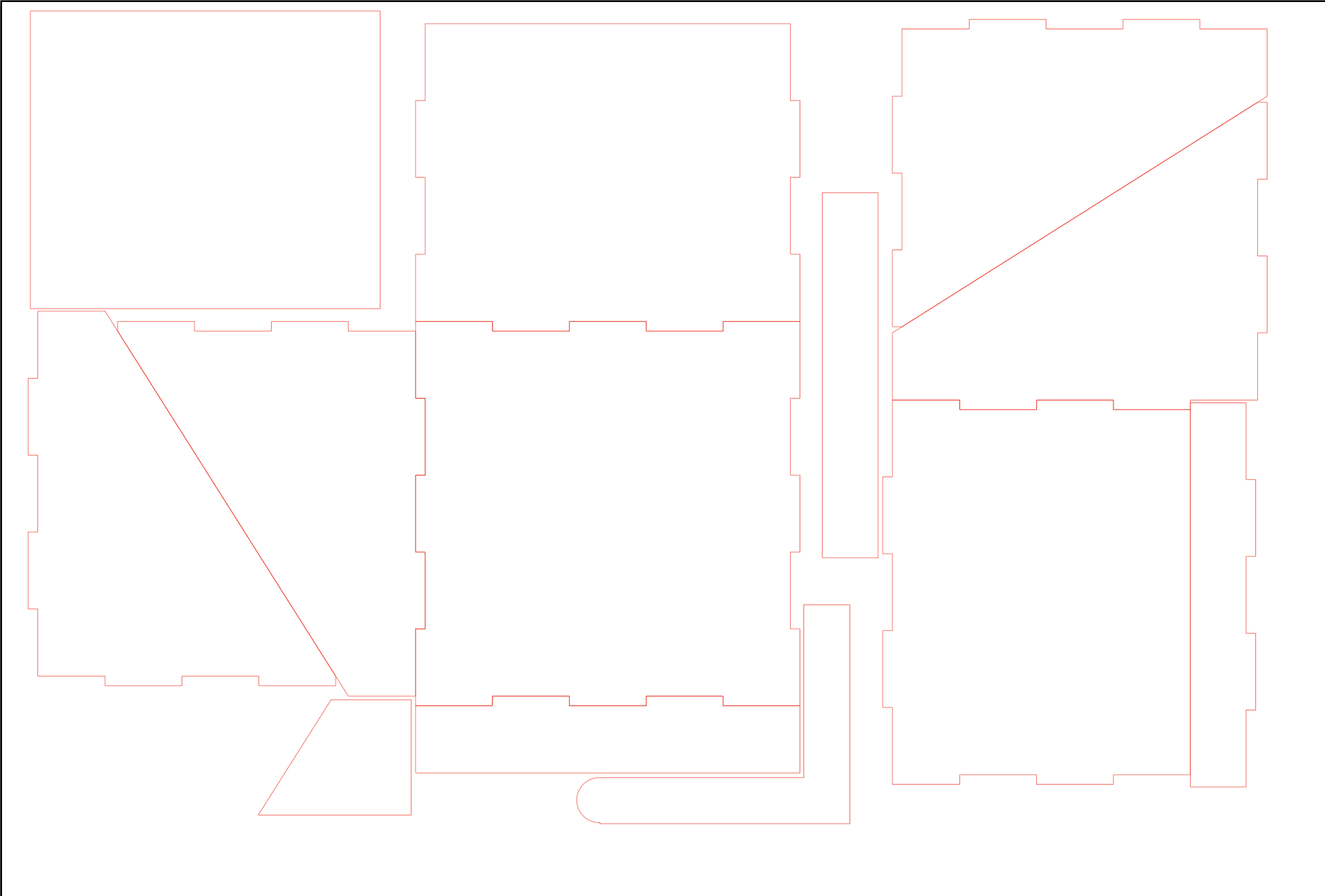
Oh-LaserのHajimeに合わせてデータを調整する。最後にDXFをPDFで保存したらおしまい。明日出力してうまくいくといいな。
レーザーカット
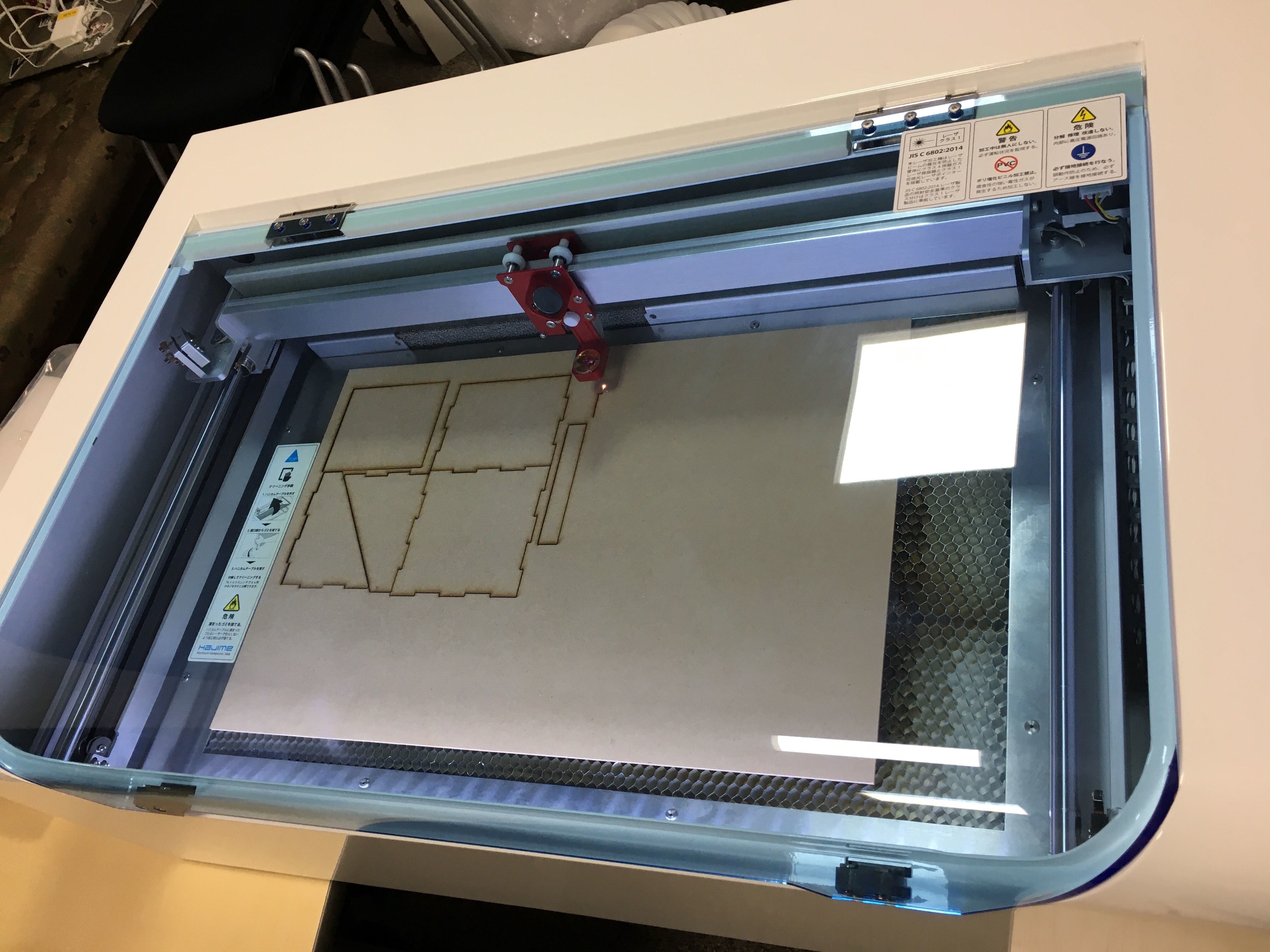
作成したデータをレーザーカッターに読み込んでカット。MDFは2.5mm。
Fusion上で非表示にしていたオブジェクトがあるのを気が付かず、DXF化出来ていなかったのであとでそれだけ切り出しました。よくあるなので気をつけよう。
3Dプリント
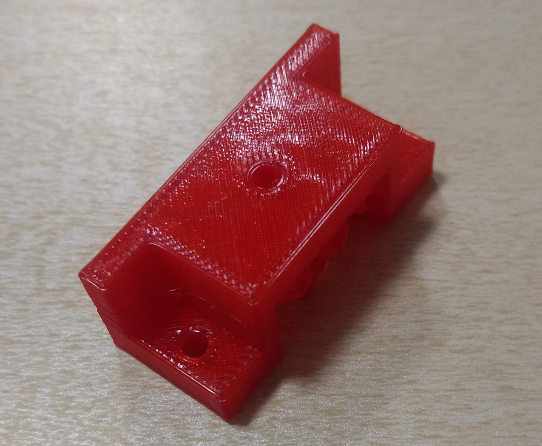
今回は初めての3Dプリンターを使ったのでスライスやデータのアップロードに手間がかかった。まだサポート材を取り除いてないのでサイズ的にぴったりかどうかはお楽しみ。
サーボ をはめてみた
サポート材を取り除いてサーボ をつけたらサイズはぴったり。でも肉厚すぎるので調整しよう。
モデルを調整
厚さを全体的に減らして3mm厚に調整しなおした。
スライス設定
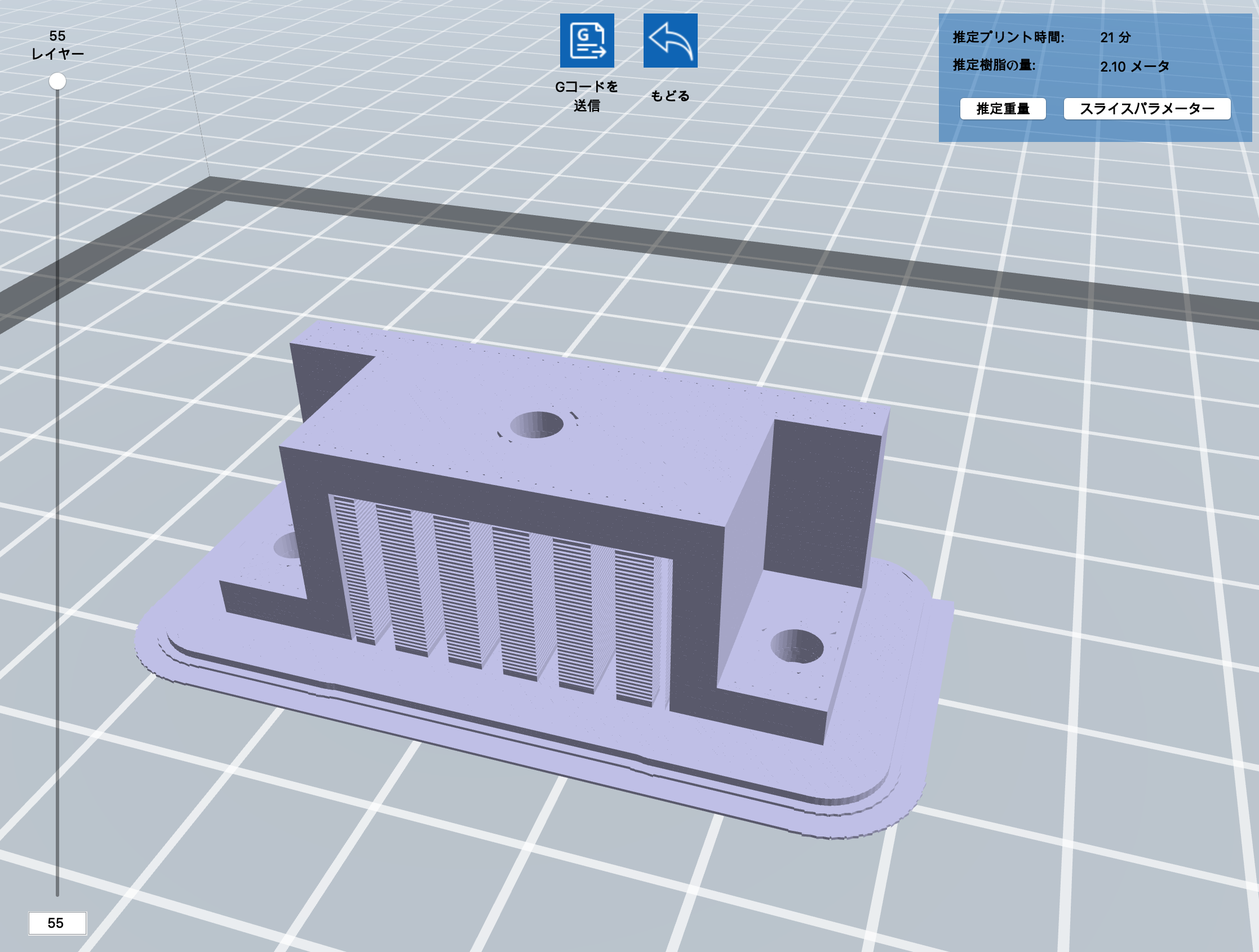
モデリングしたデータをFlashPrintでスライス設定をしてみるとプリント時間は21分に。
昨日は50分くらいだったから半分以下の時間になった。
昨日は50分くらいだったから半分以下の時間になった。
組み立て
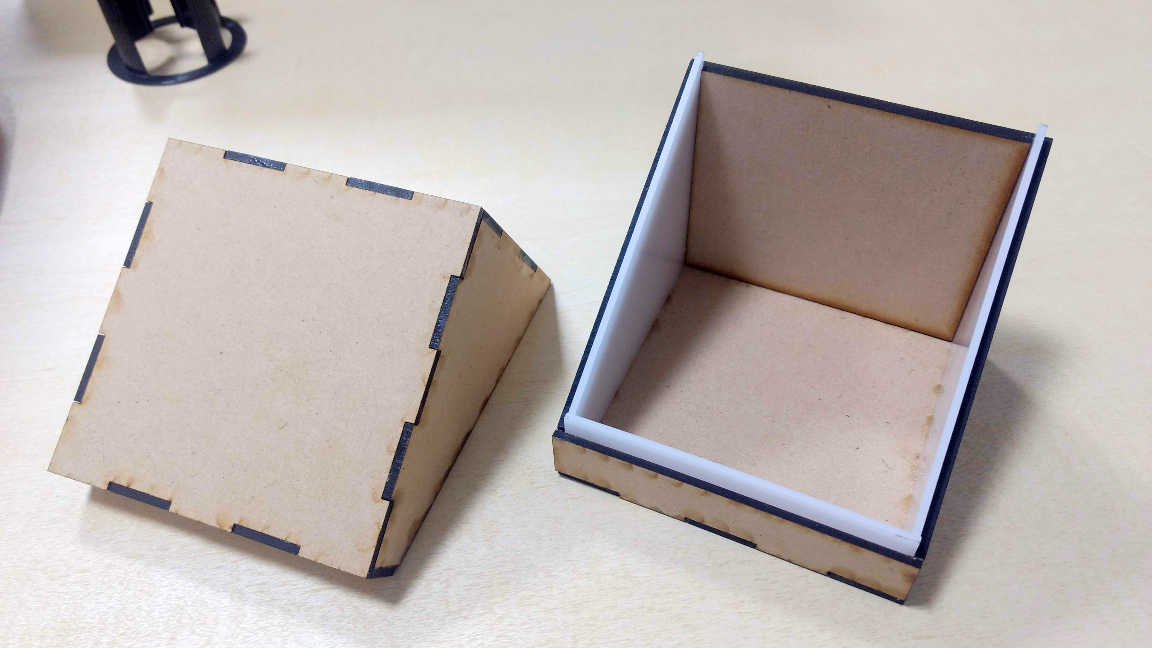
切り出したパーツを仮組してみたところ、設計通りに組み上がった。一部、マージンを取っていなかった箇所はキツキツなのであとで削る。仮組なのはサーボ位置を割り出したあとに穴あけ加工をしたいから。
サーボの取り付け
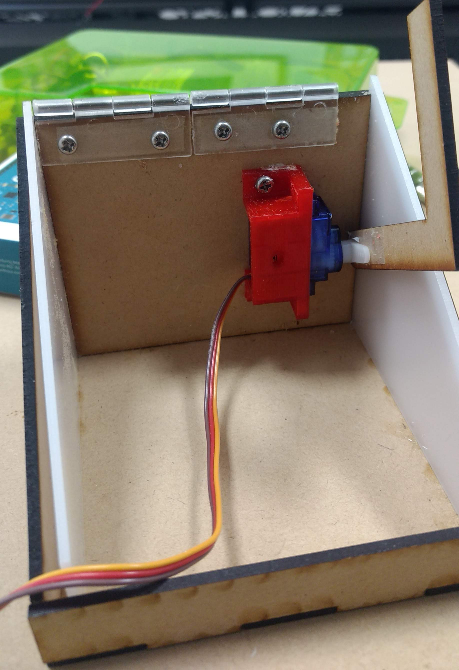
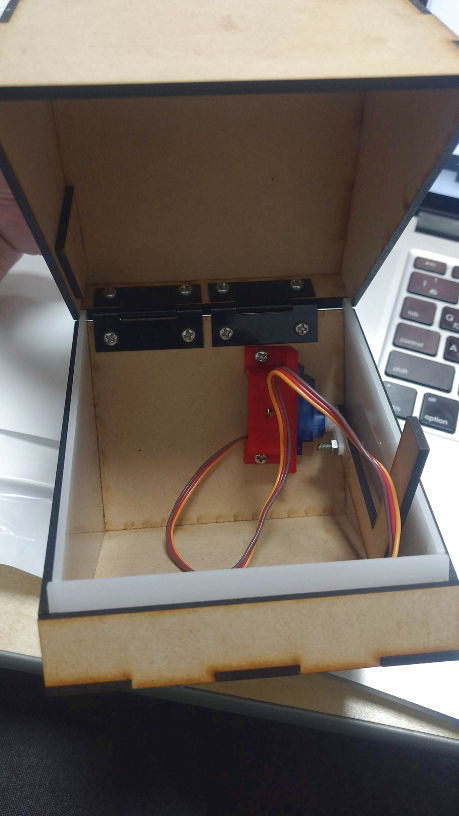
サーボマウントとアームを取り付けた。蝶番は軽量のプラ製のものを使っているが重くても大丈夫そうなのでこれ以降では金属製を使う予定。
開閉実験
とりあえず構造的に問題はないみたいなのでホッとする。このあとはどのセンサーを使ってどんなギミックで解錠するかを考える。
どうやってもYoutubeにつながらないので、別リンクを貼っておく。
LEDを試してみる
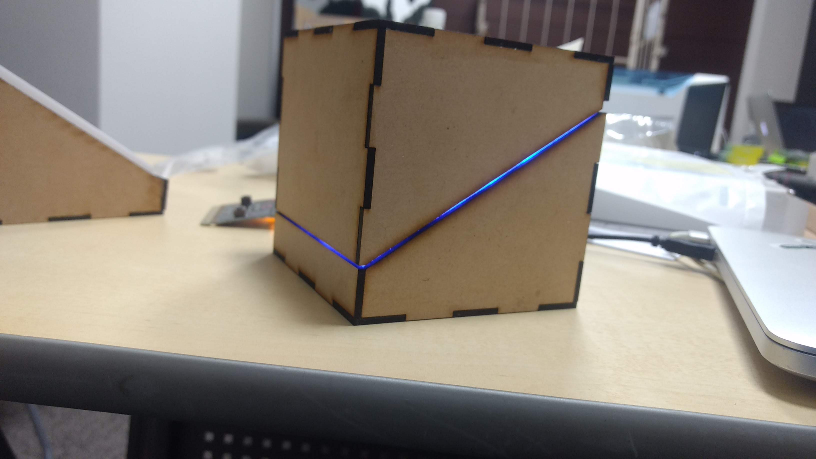
2mmの乳白アクリルだと結構きれいに色が出る。まだ固定していないから光がまだら。
赤色バージョン
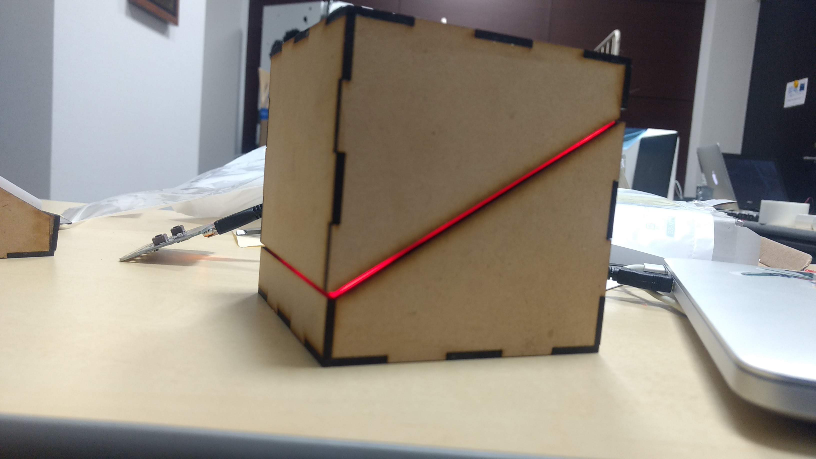
ちゃんと条件に合った場合は青色に光って蓋が開く、そうじゃない場合は赤色に点灯する。
LEDテープ

今回は2色を同じ位置で光らせたいのでフルカラーLEDテープを使用。点灯テスト用にはmoto:bitを使用している。
箱を微調整
ここまでで調整した穴位置やマージン部分などを設計データに反映させて再度レーザーカット。サーボマウントと合わせて基本の箱開閉キットは出来上がり。あとはサーボによって開口部を作ったり、内部にいろいろ取り付けたりする。
サーボを選ぶ!ギミックを考える!
エンジニアもこのプロジェクトに参加してくれて一気にセンサーの組み込みが加速した。
まずは外装を変えなくていい磁気センサーを使ったバージョン
箱の外装を再検討する
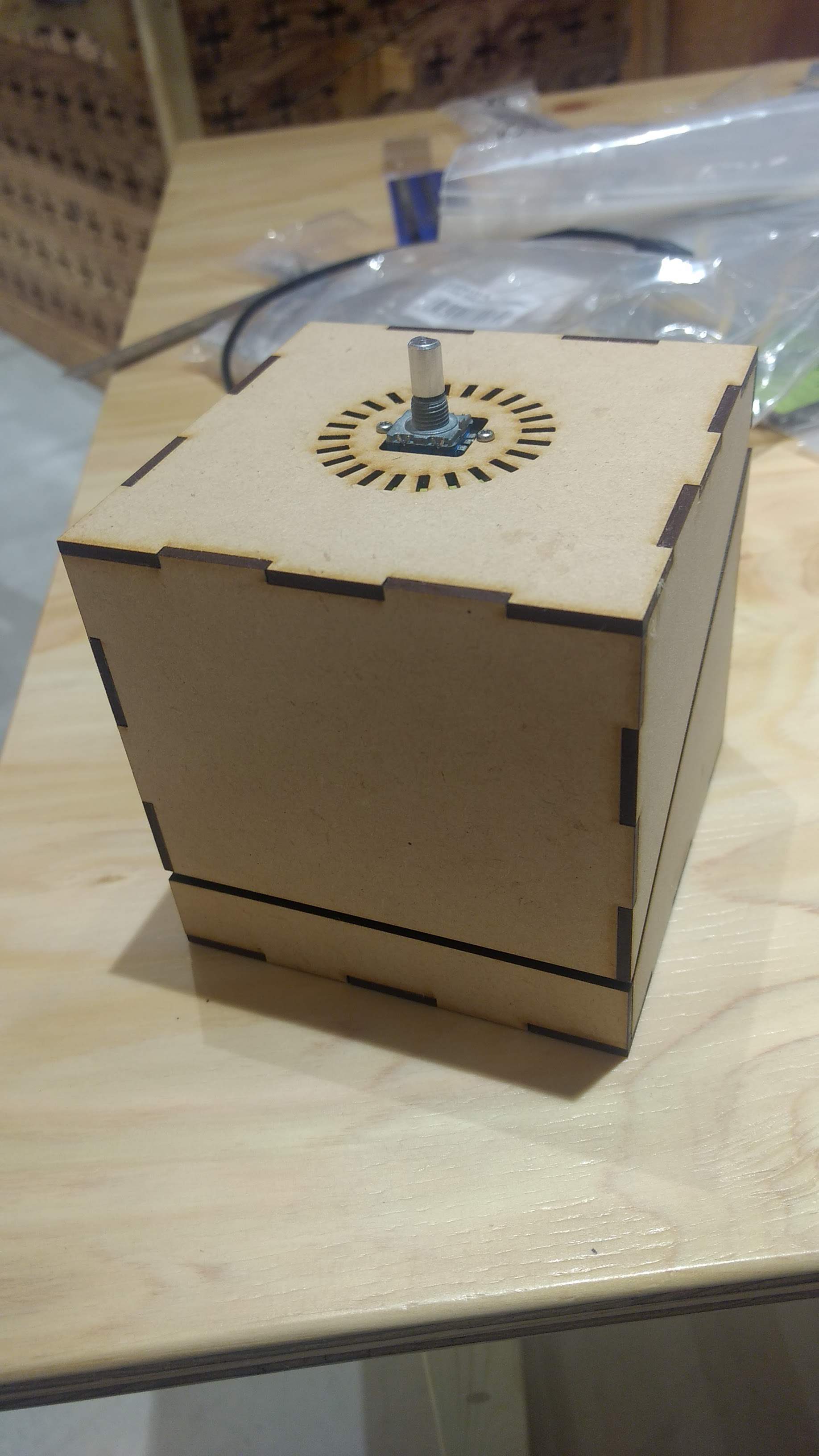
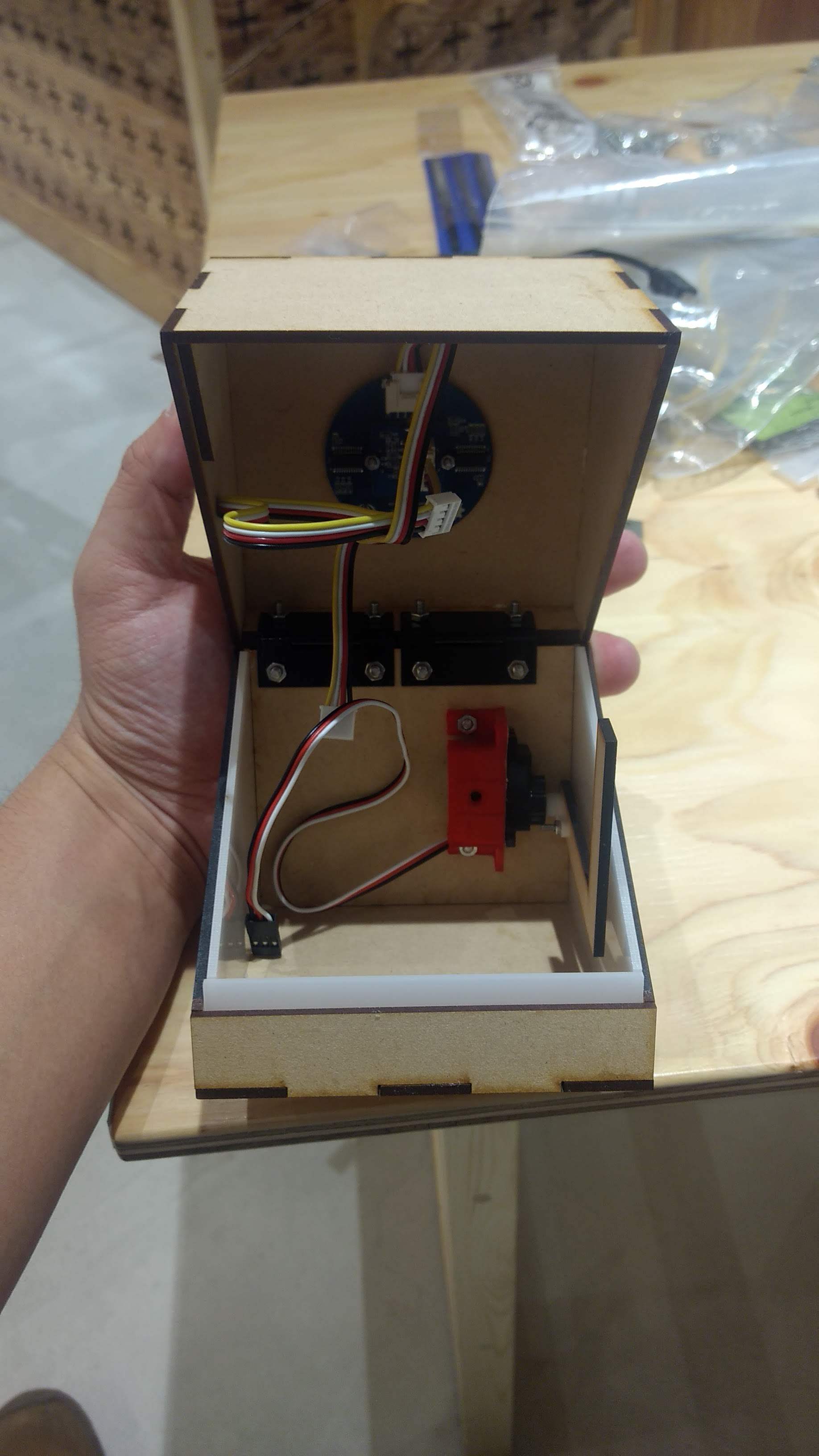
箱を作りはじめて4世代目になるロータリーエンコーダとサークルLEDを使ったこのバージョンから外装のクオリティをあげてみた。
スリットの間を少し広めに固定
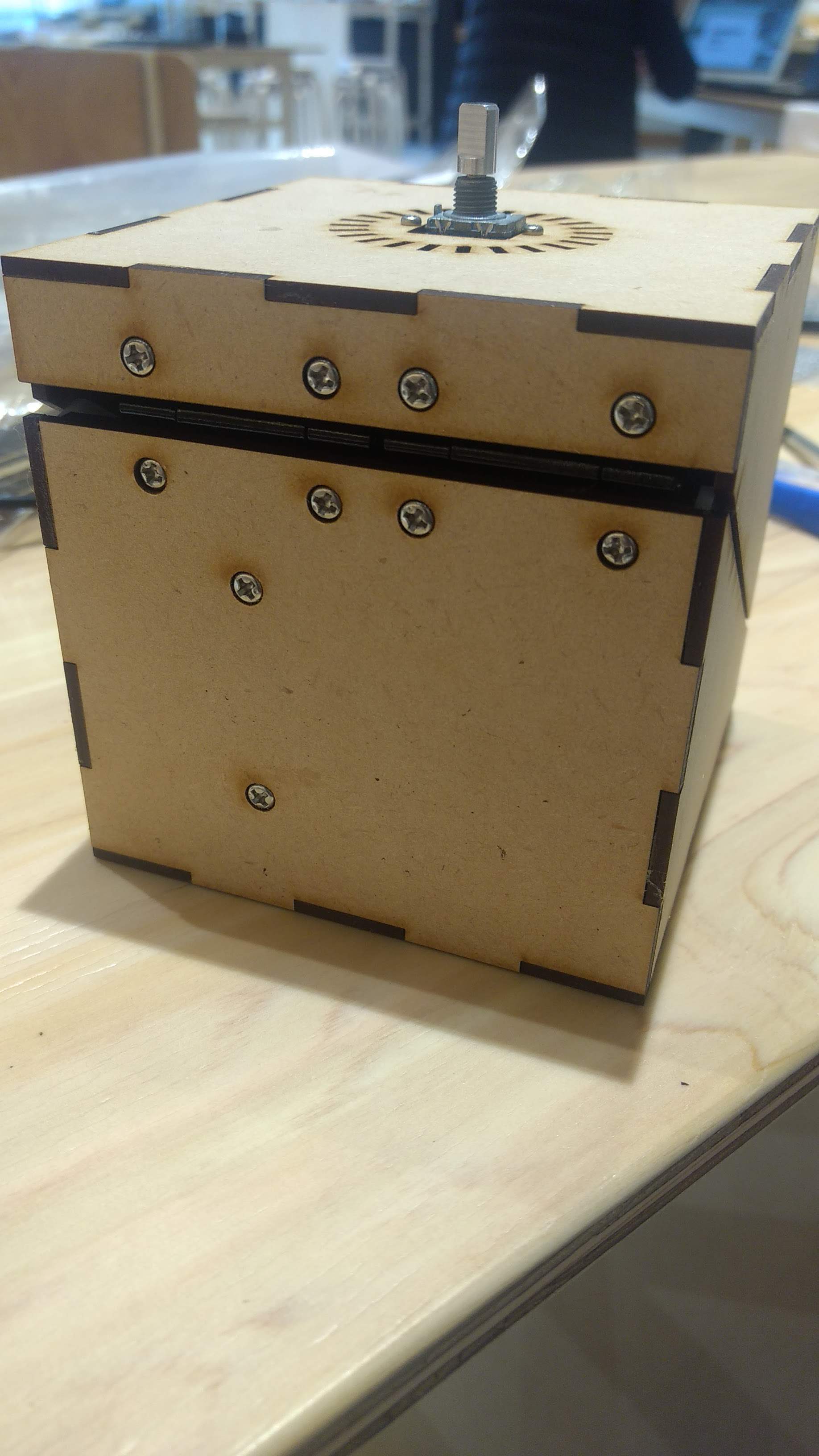
背後のネジを埋め込む
中もシンプルにまとめる