図書館監視ロボとはどんなものか
皆さんは図書館(または図書室)で「静かに勉強したいのにあの人たちの会話がうるさい、けれど自分一人で注意する勇気が出ない」なんてことはないですか?
この図書館監視ロボはそんな問題を解決してくれるロボットです。
きっかけ
どんなものがいいか考えているとき「自分の経験をもとに作るのがいいのではないかと」先生からアドバイスをもらい考えてみたところ、夏休みに近所の図書館で勉強をしているとき、隣の小学生が会話をしていてなかなか勉強に集中できないということがあったのを思い出し、この経験をもとにロボットを作成しました。
イメージ
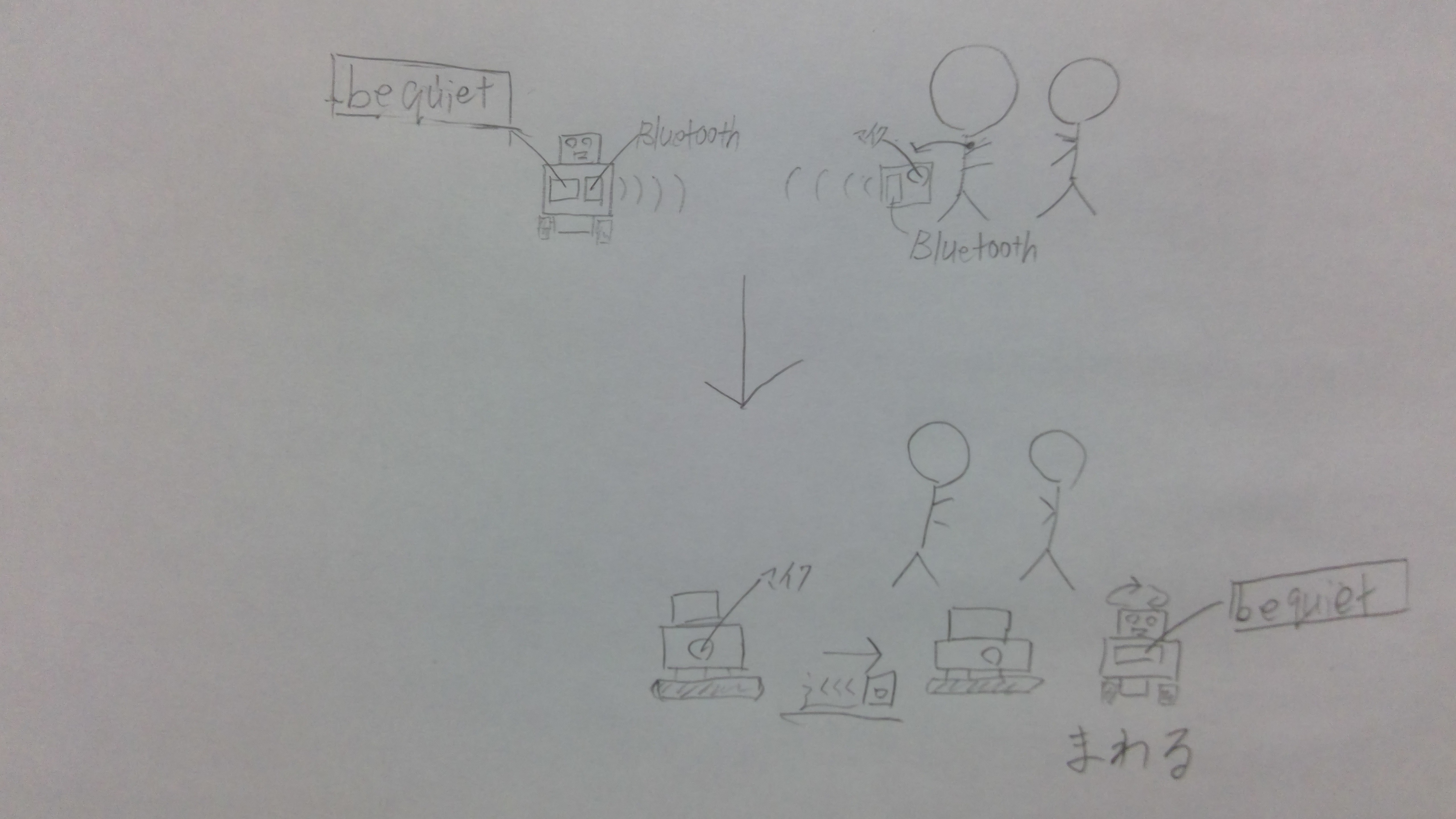
作成する前は利用者1人1人にバッジ型にしマイクとロボット本体を無線(Bluetooth?GPS?)でつなぎマイクがある一定の数値をこしたときロボットがそのバッジのある所に行きディスプレイに文字を出し注意をするというロボットを作成しようと思いましたが、プログラミング段階でなかなかペアリングをしないなので断念
なのでロボットが図書館内を巡回し、している間にある一定の数値をこしたときにロボットとが目立つ動きをし(その時ディスプレイに注意の文字)周りからの視線を集めその近辺を注意するというロボットを次に考えました。
見た目

ネットでロボットの見た目はどのようなものがいいか模索しているとある映画に出てくるロボットを見つけたとき「かわいらしいロボットだと注意されたとき憎めない」と思いそのロボットを参考にしました。
使用するもの
・ArduinoUNO
・ジャンパーワイヤー
・サウンドセンサー
・LCDディスプレイ 20×4
・超音波センサ-
・キャタピラ
・サーボモーター
モデリング

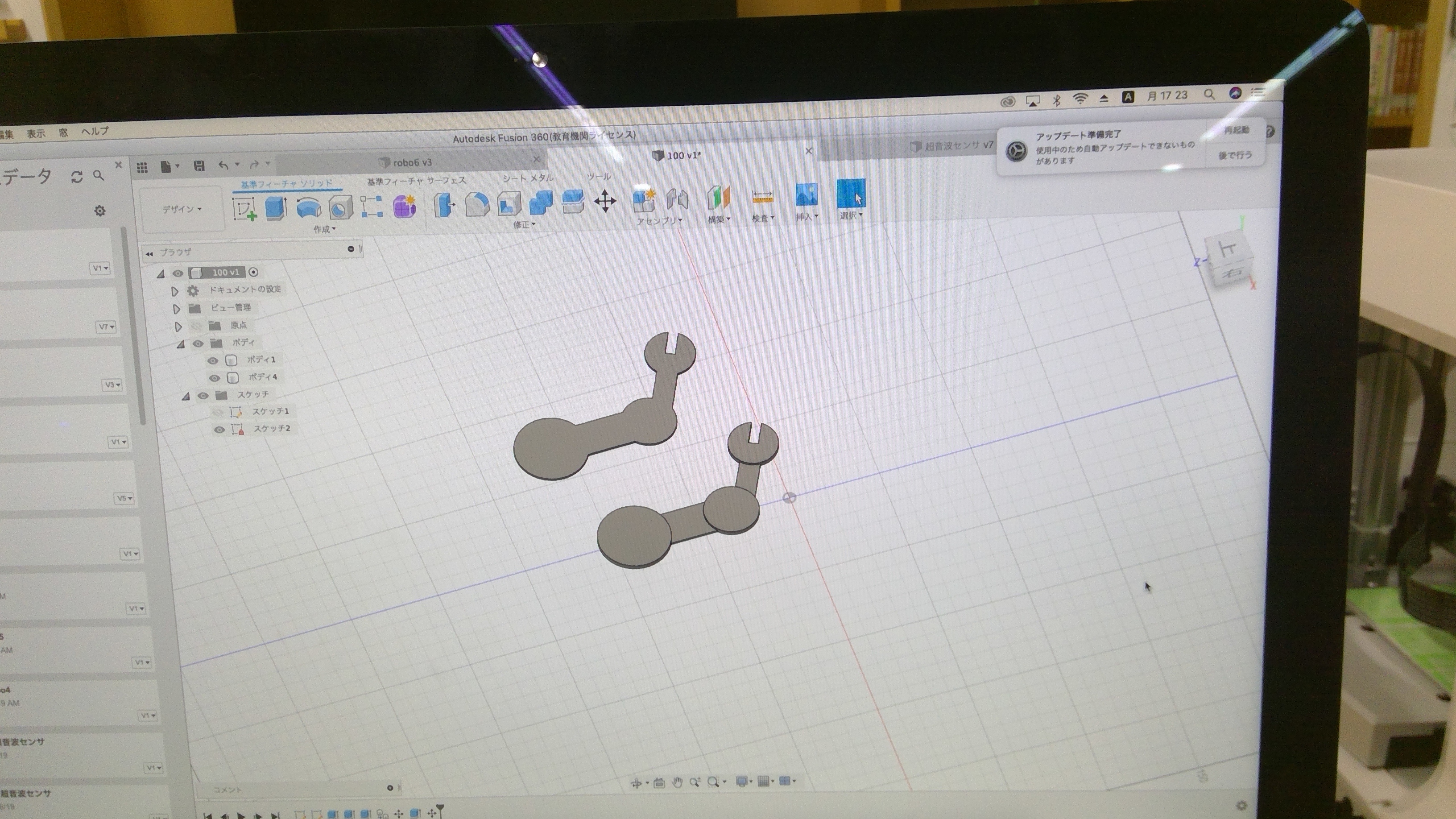

今回はモデリングをするのにFusion360を使いました。
ロボット本体は少し大きめで目立つようにしました。顔は注意されても
憎めないようにかわいく
プリント
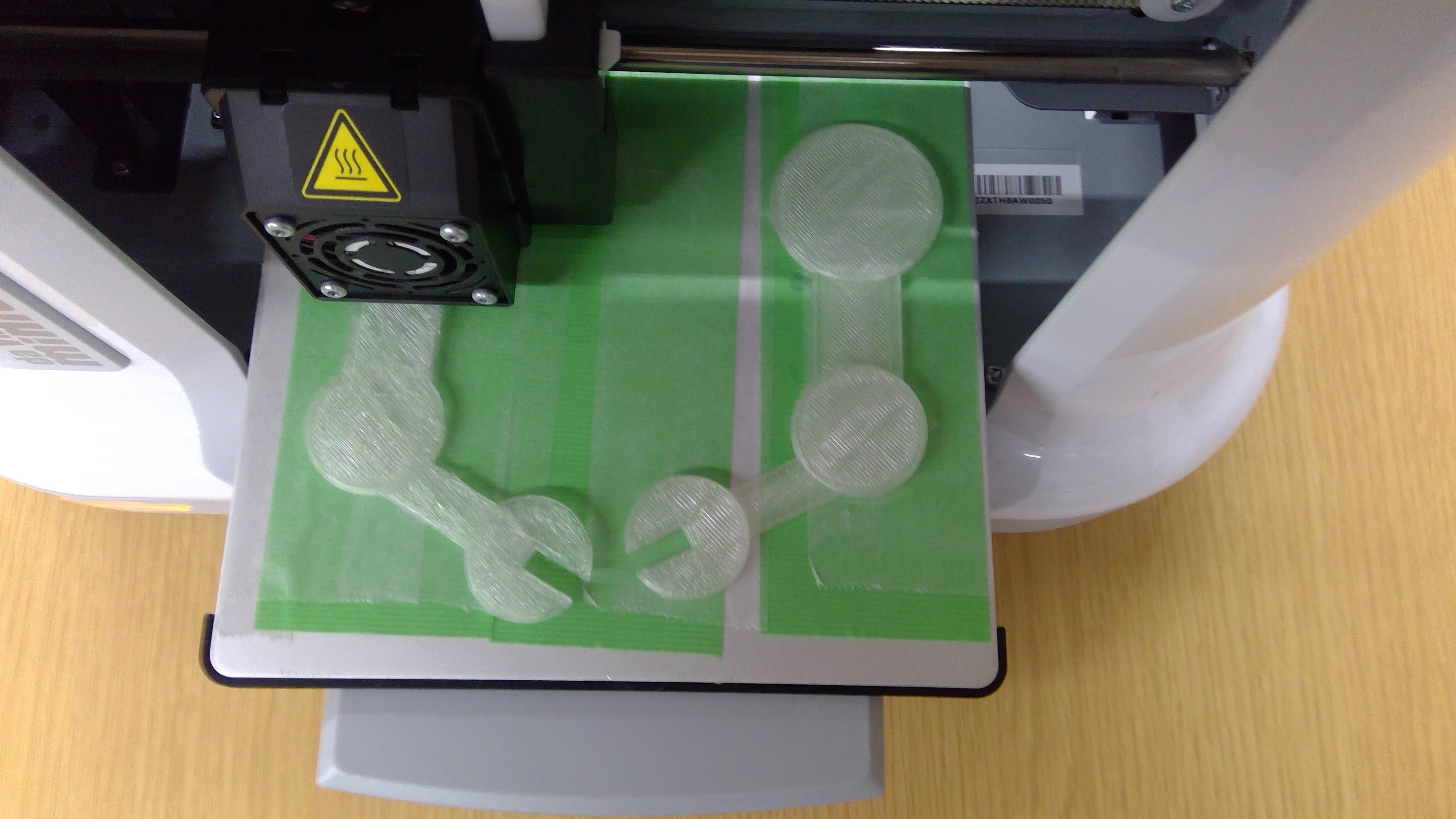
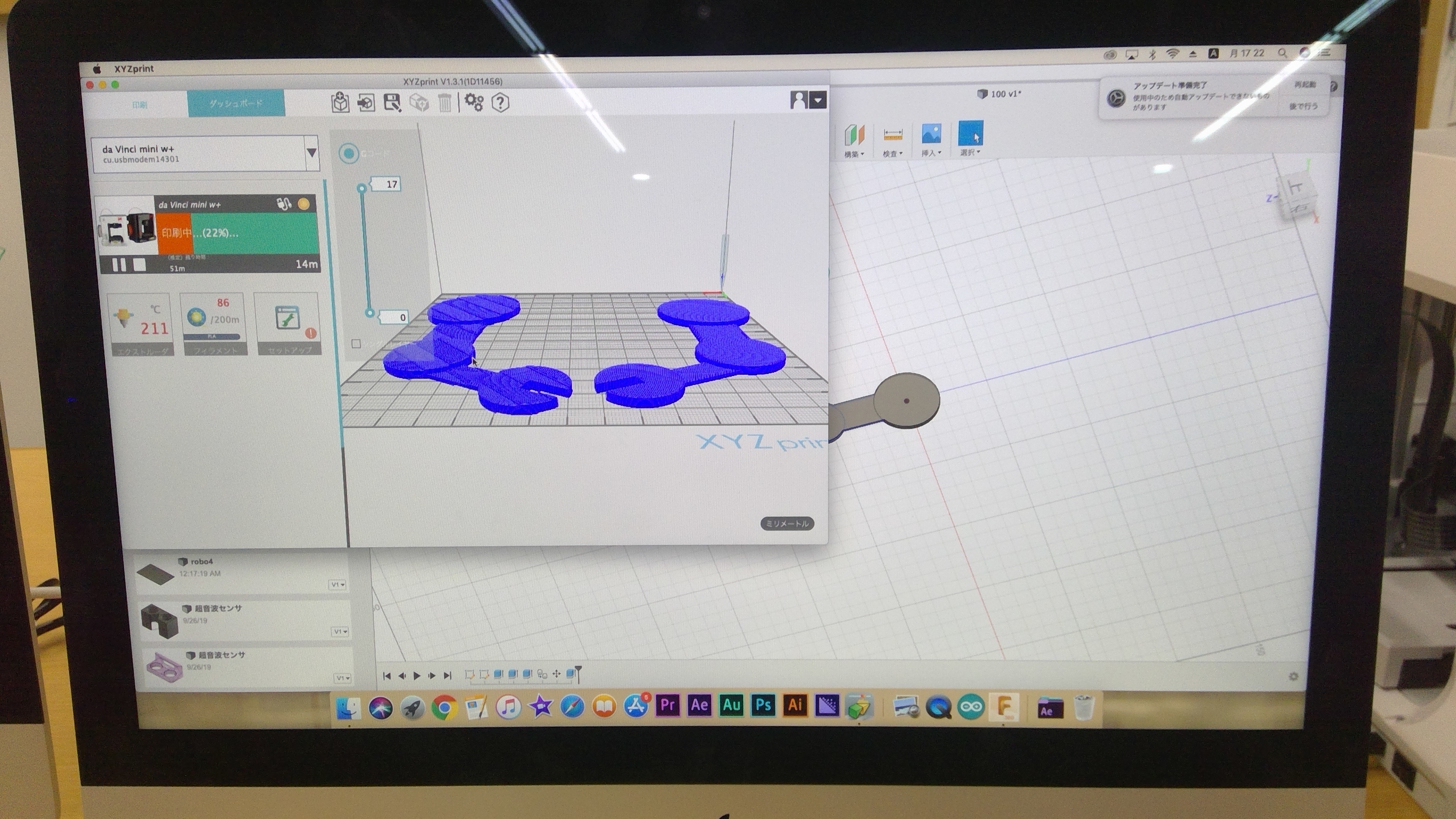
今回使用したプリンターはダヴィンチminiwとダヴィンチminiw+を使用しました。
基本透明のフィラメントを使い下の部分は黄色のフィラメントを使いました。
失敗


なっ!/(^o^)\ナンテコッタイロボットの腕の裏が~!
しっかりプリンターの土台の両面テープにくっついておらず裏がぐちゃぐちゃになってしまいました。
それ以外はきれいにできました。
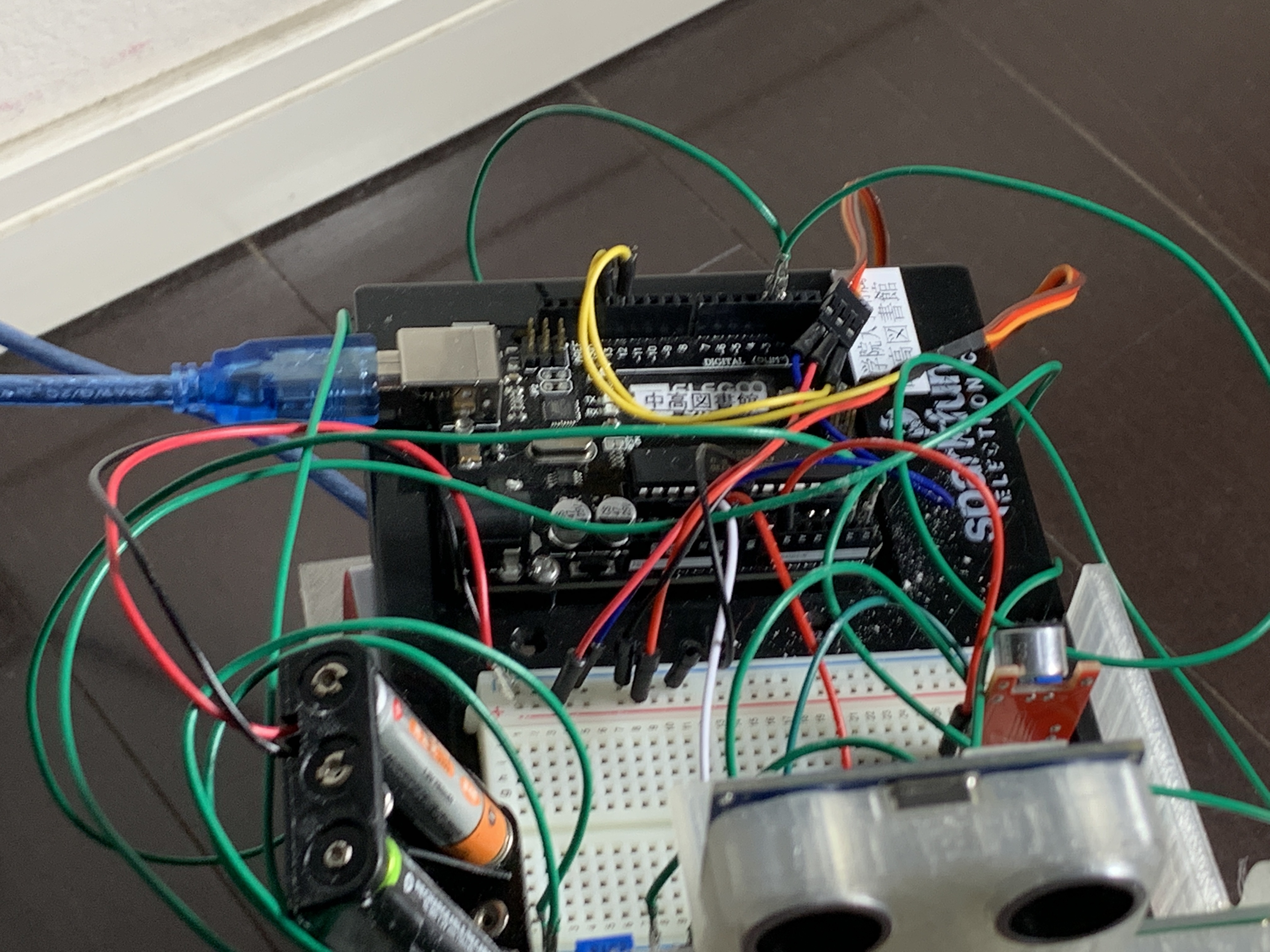
配線

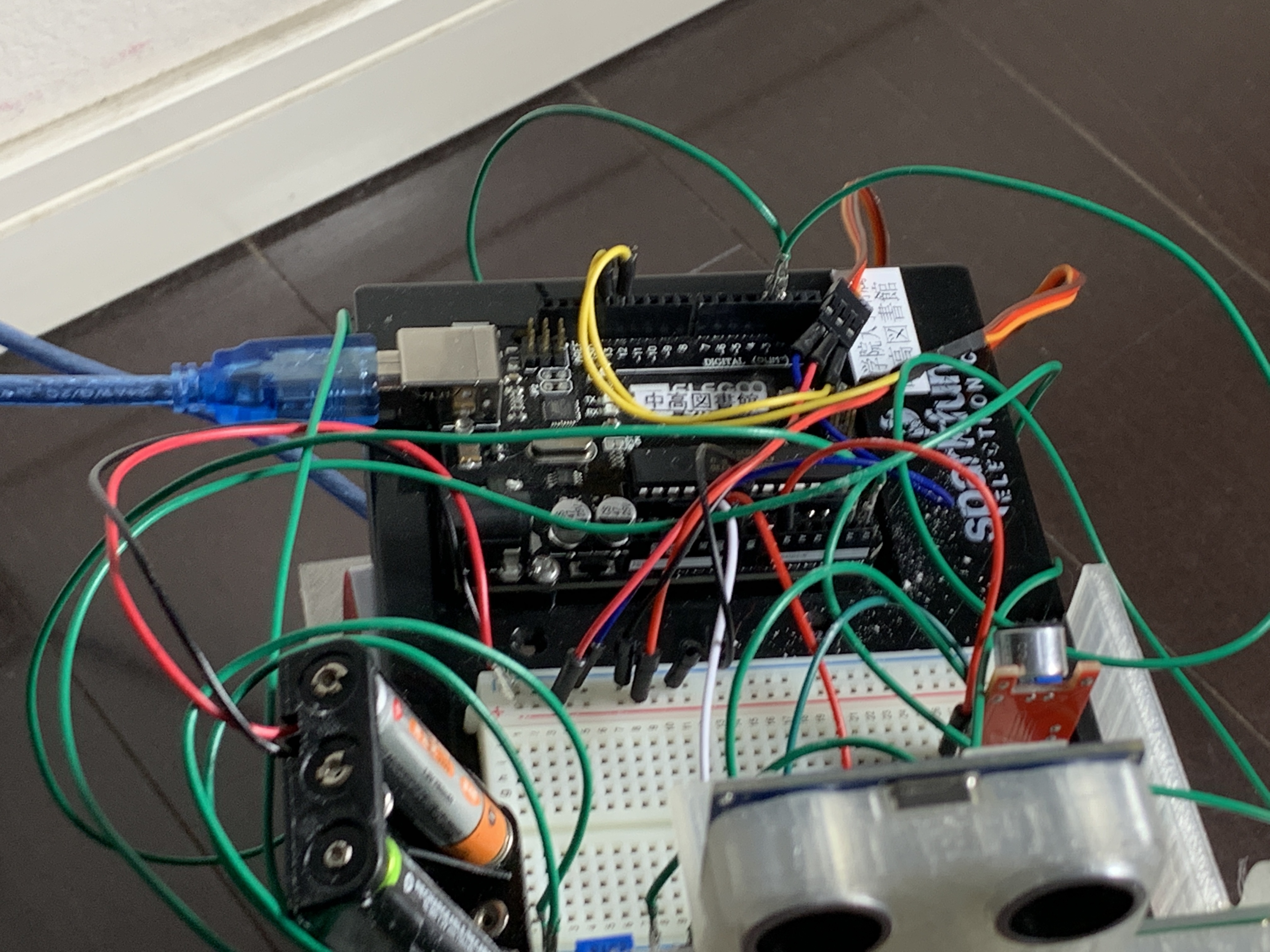

たまに配線を間違えイライラしながらもなんとか完成
機械感があってカッコいい‼
プログラミング

まずは1つ1つの動作確認
1.超音波センサーとサーボモーター
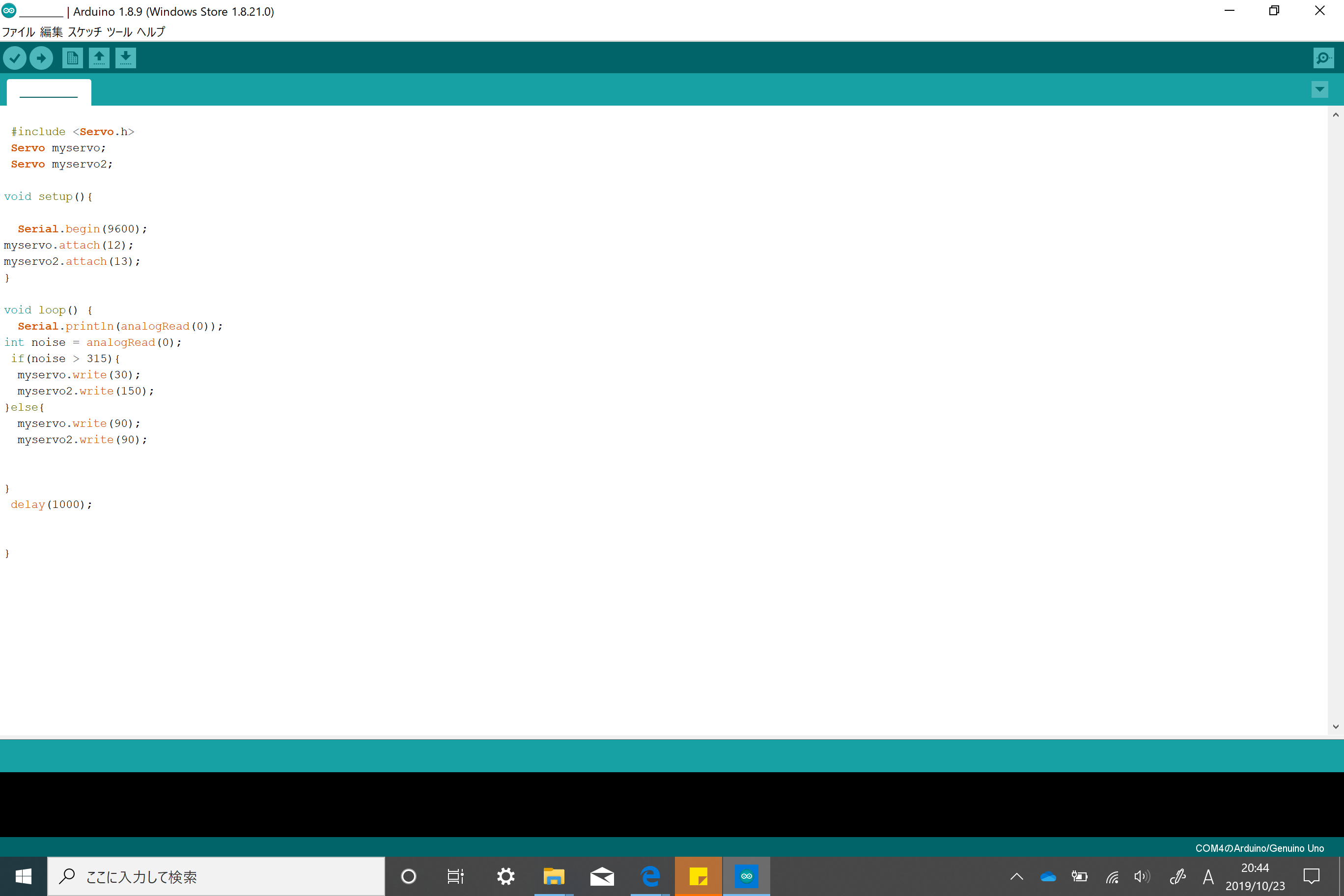
2.サウンドセンサーとサーボモーター
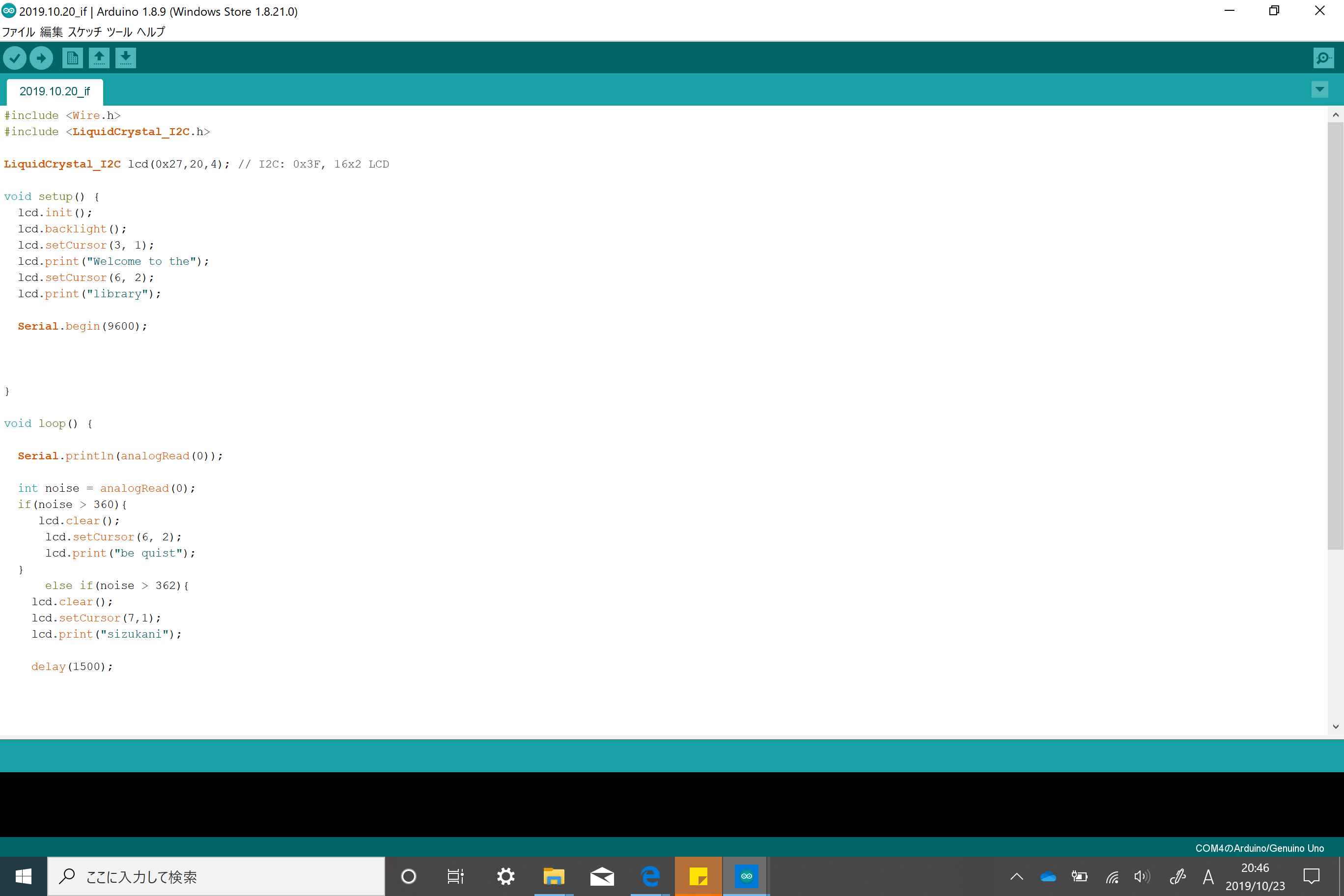
3.サウンドセンサーとLCDディスプレー
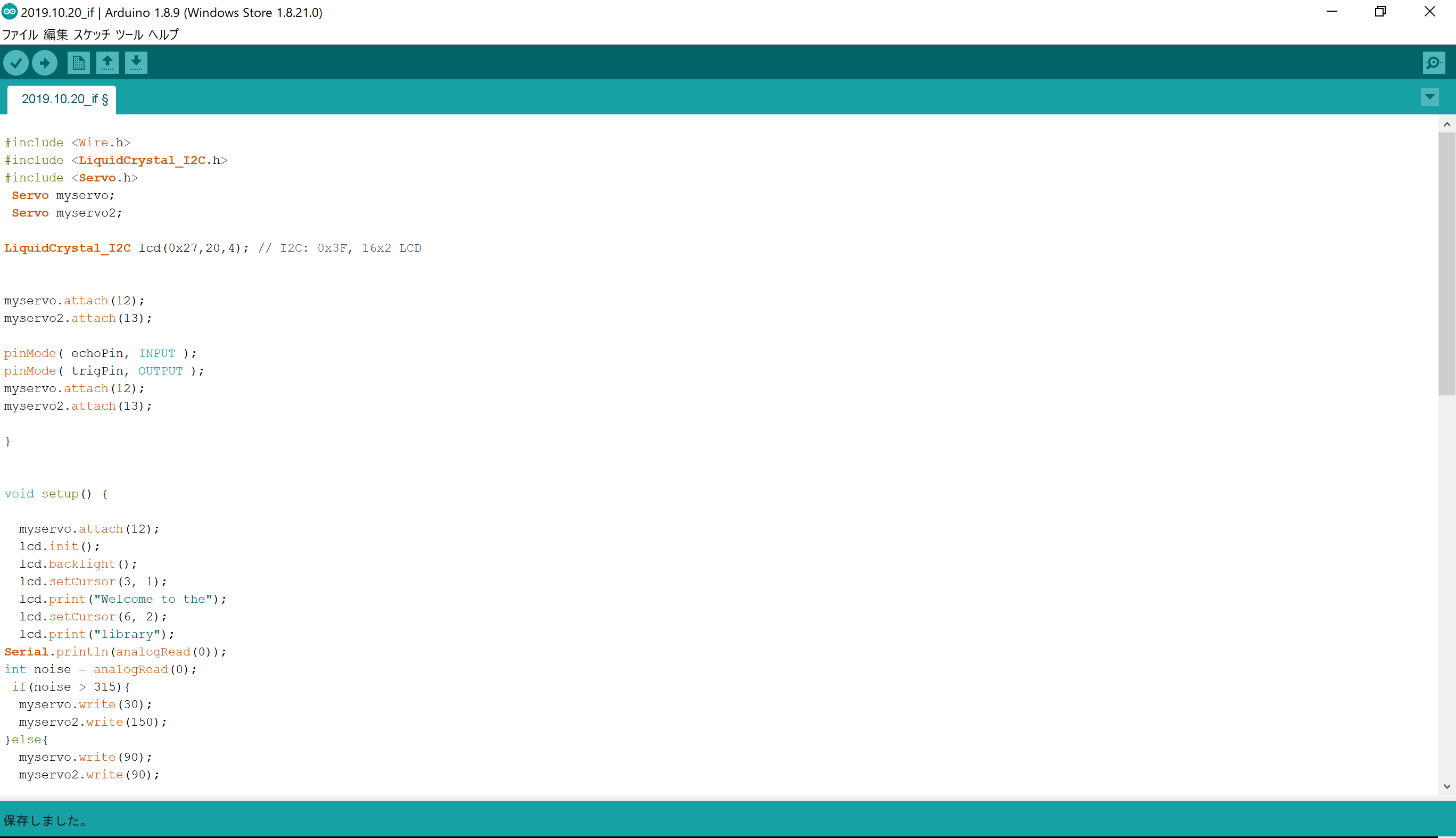
4.すべての確認が済んだら最後は1つにして完成
完成
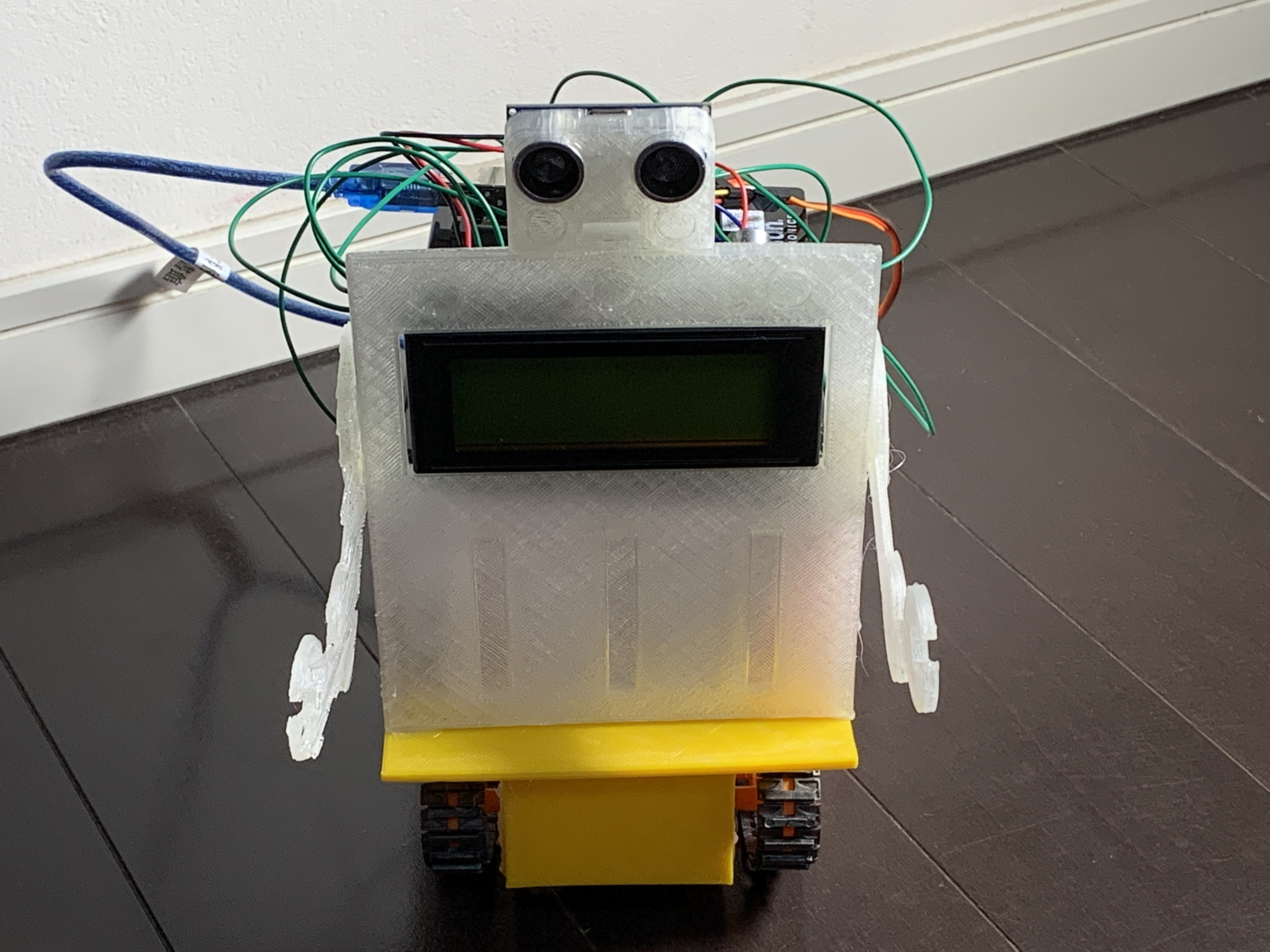
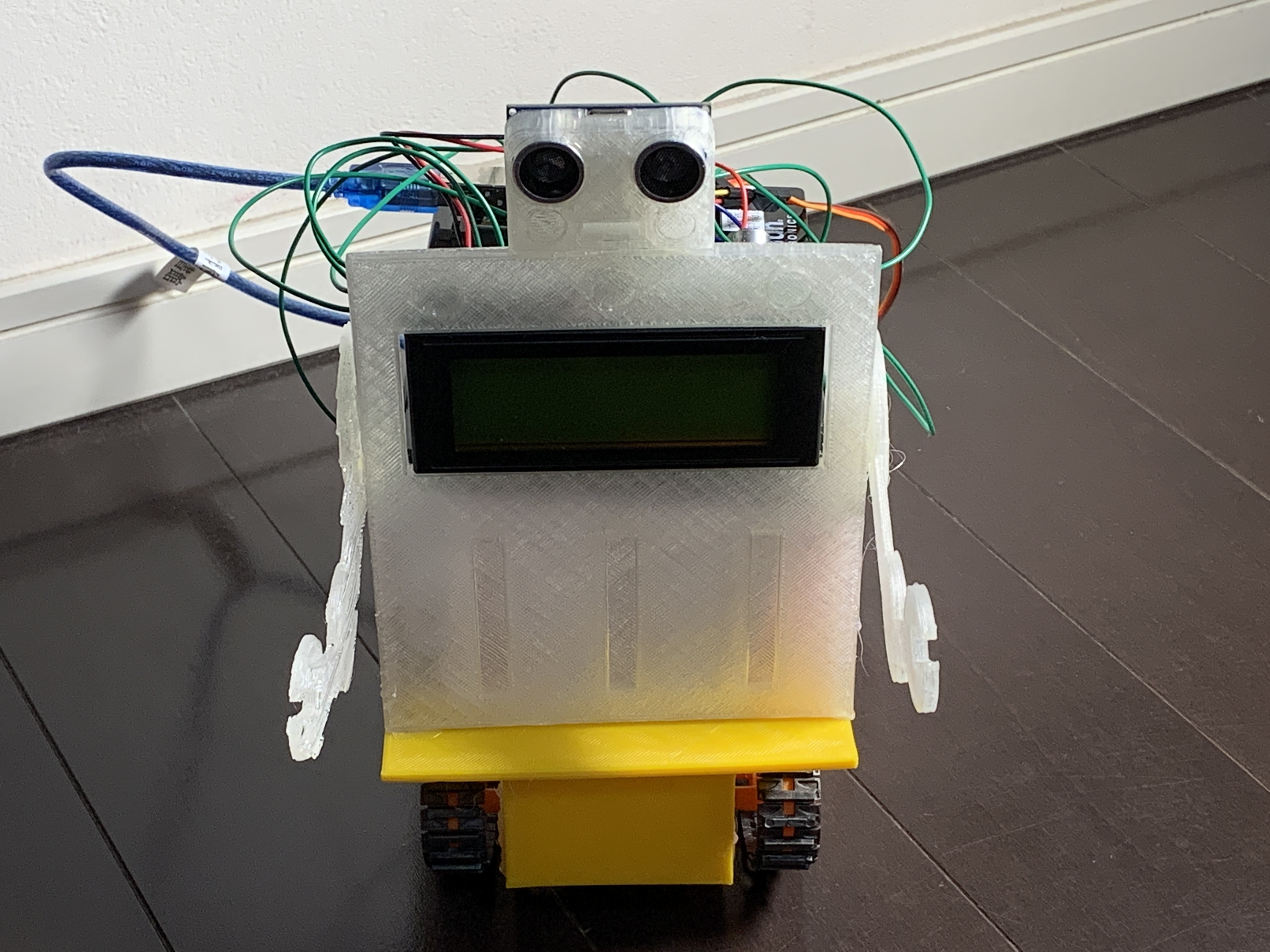
はじめてにしては、まぁいいのかなとそこそこ満足‼
注意するときのぐるぐる回るのもできたしLCDディスプレーにも「be quiet」
も出たし超音波センサーで人を感知してしっかり止まれた。
なんとかプログラム全てができてよかった。
今後も改良を続けて実際に学校の図書室で動かしたい
プリント完了





失敗もしたけどなんとか無事プリント完了!