
メモ
3Dでプリンタで作ったパーツは割れやすいのでそのうちレーザーカッターで作ったバージョンも公開予定
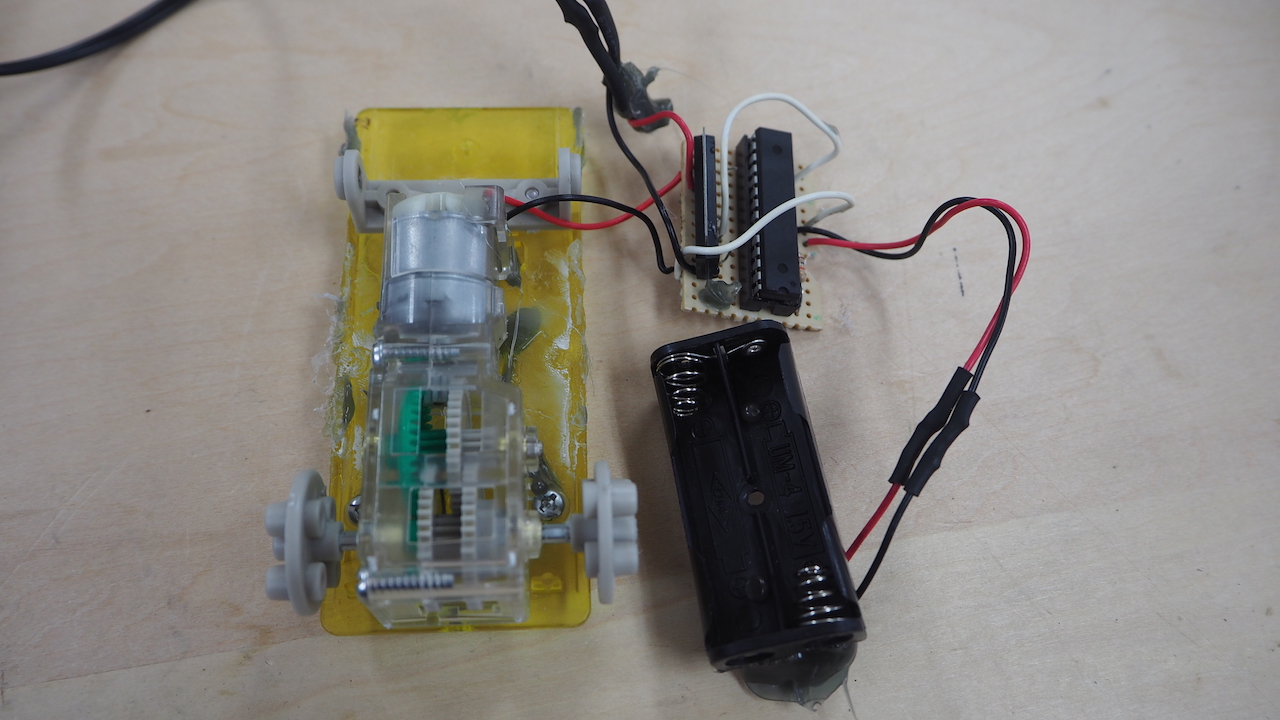
ギアボックスを組み立てる
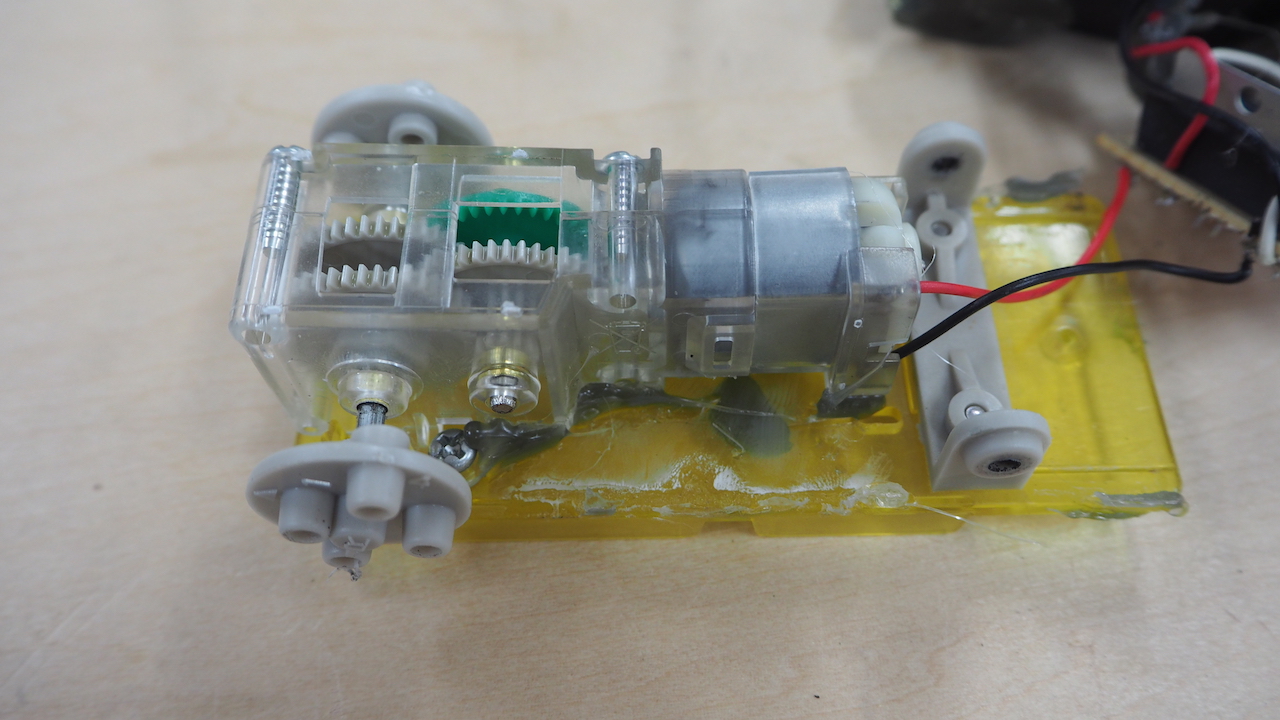
タミヤ ロボクラフトシリーズ メカキリンを開封し、説明書③〜⑤に従ってギアボックスを組み立てる。
このとき、逆転スイッチは使用しないので取り付けなくてよい。
また電池ボックスはマイコンに接続するので、ここではモータとは配線しない。
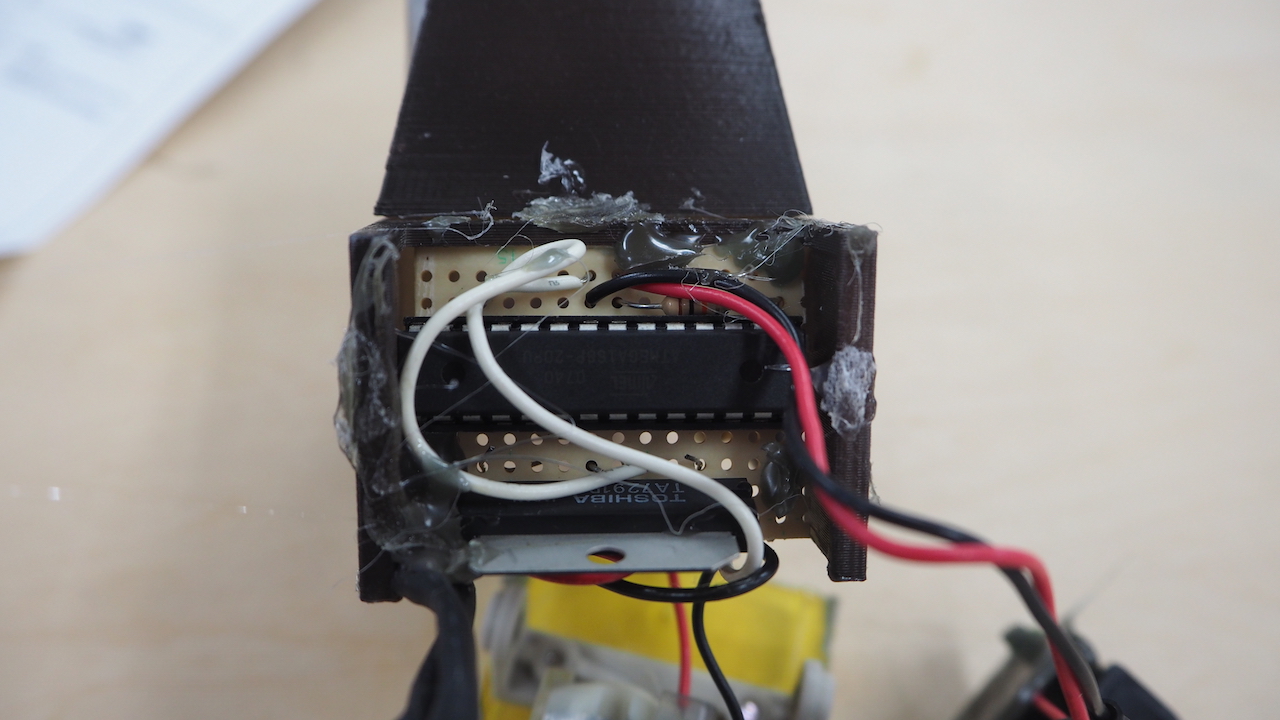
基板部を組み立てる
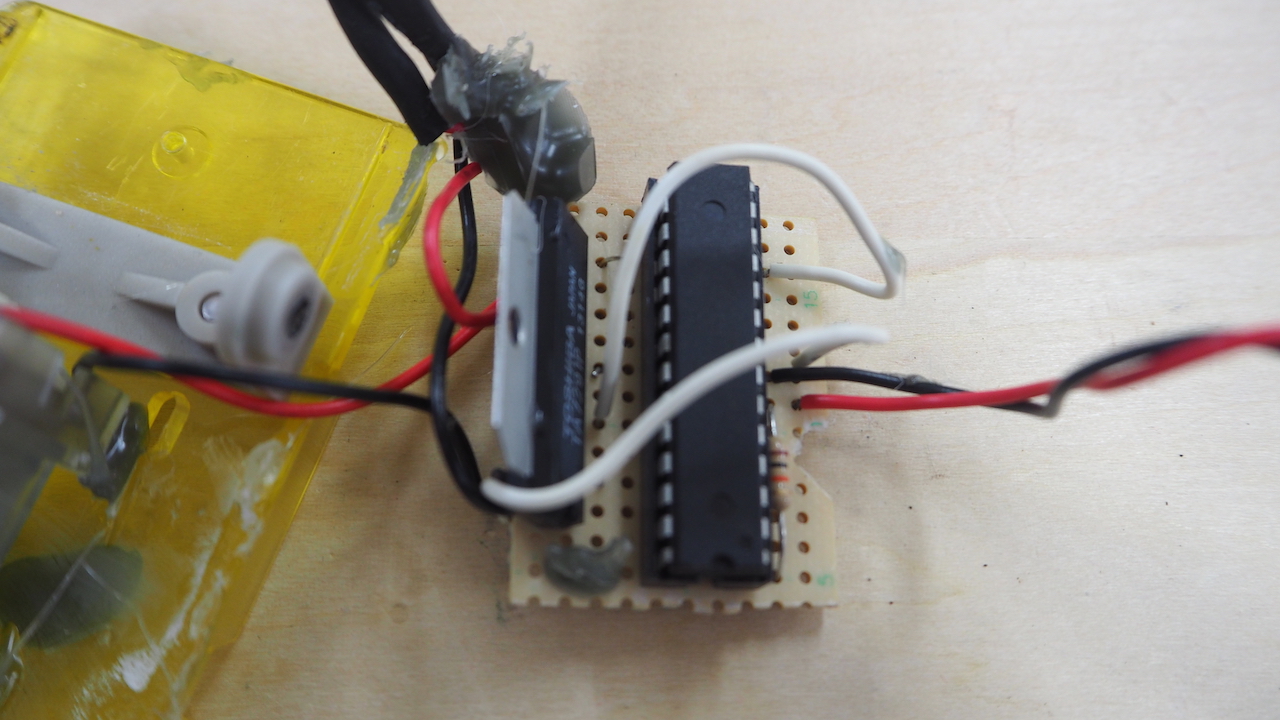
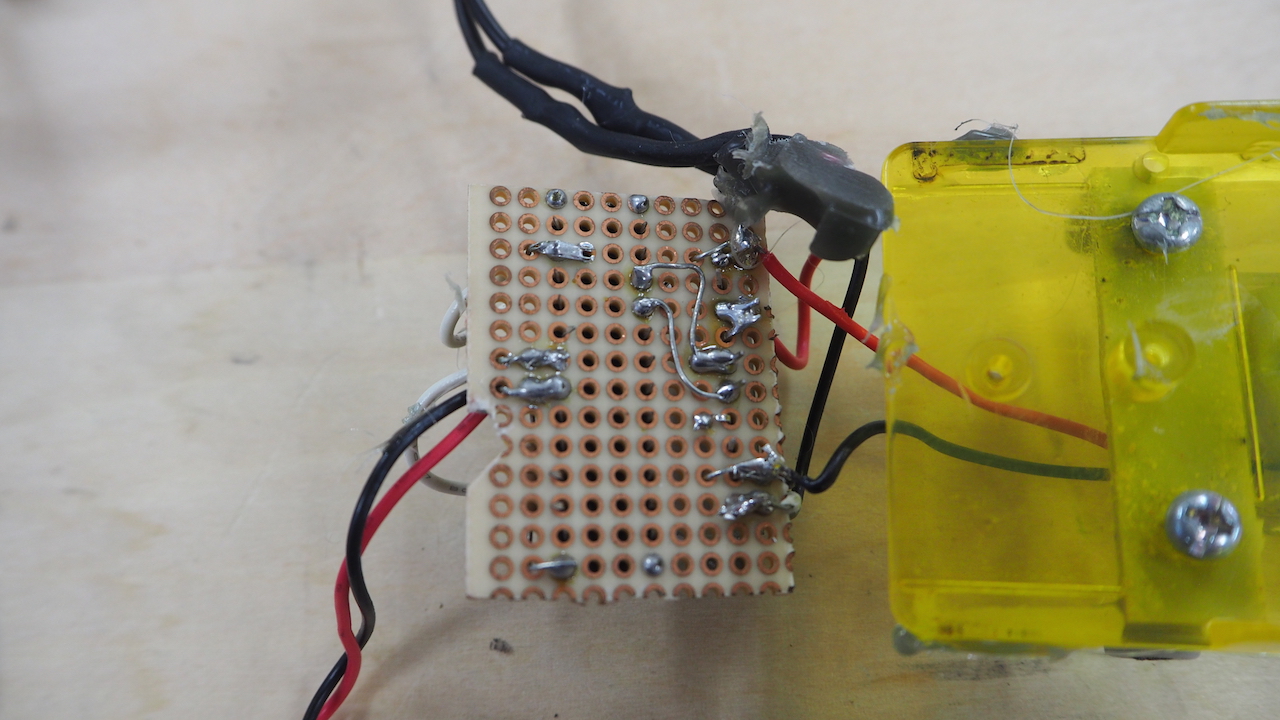
ロボットの動きをプログラムするための基板を作る。
今回はできるだけ小型にしたかったので、ArduinoのファームウェアをAVRマイコンATMEGA168Pに書き込んで、自作Arduinoとして使用した。
下記の手順などを参考にしながらATmega168Pにファームウェアを書き込んで、プログラムのスケッチをアップロードします。
ただちょっとこれは初心者には難しめなので、Arduinominiとか Trinket使ったバージョンも公開します。
参考
http://jun1chi.blogspot.jp/2012/02/atmega328parduino-pro-33v-8mhz.html回路図
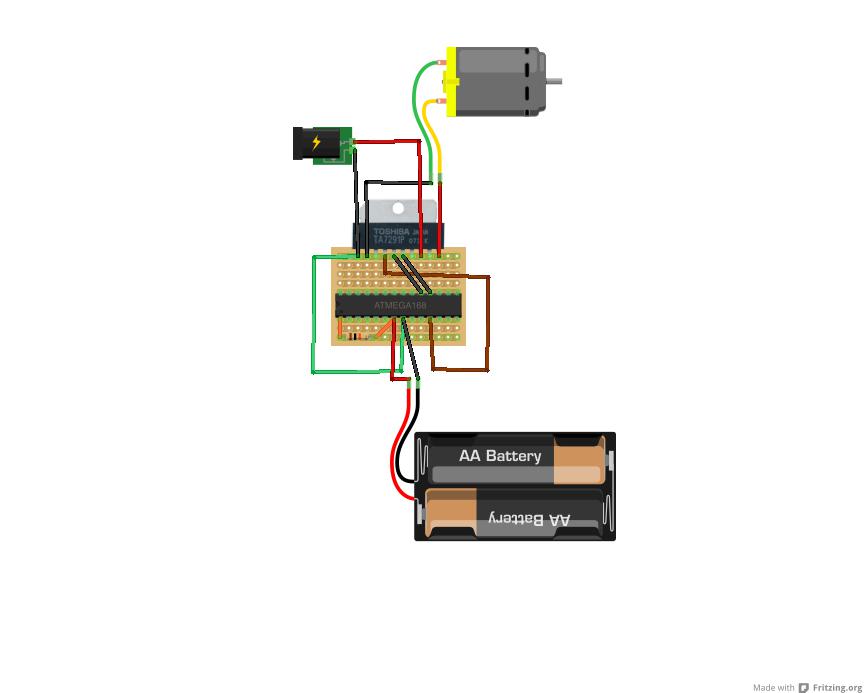
メモ
マイコンとモータを同じ電源から引いてしまうと、モータの方に電気を持って行かれてしまい、マイコンがリセットされる問題があるので、ACアダプタを接続している。おそらく別の電池ボックスを使ってもいいと思われる。
ここも今後改善予定。
ギアボックスに体パーツをつける
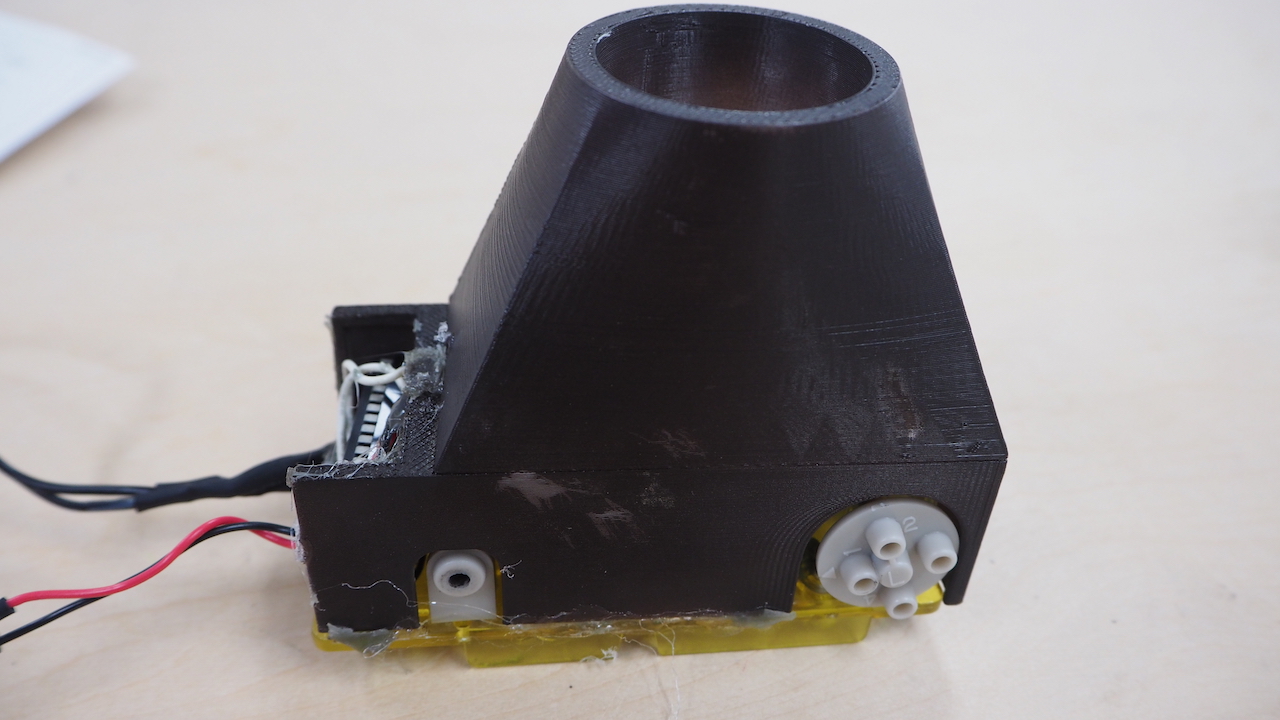
接着剤などでギアボックスに体パーツをつける
基板を体パーツにつける
グルーガンなど使うとつけやすい
カバーを付ける
プラ版とかでカバーを作ってつける
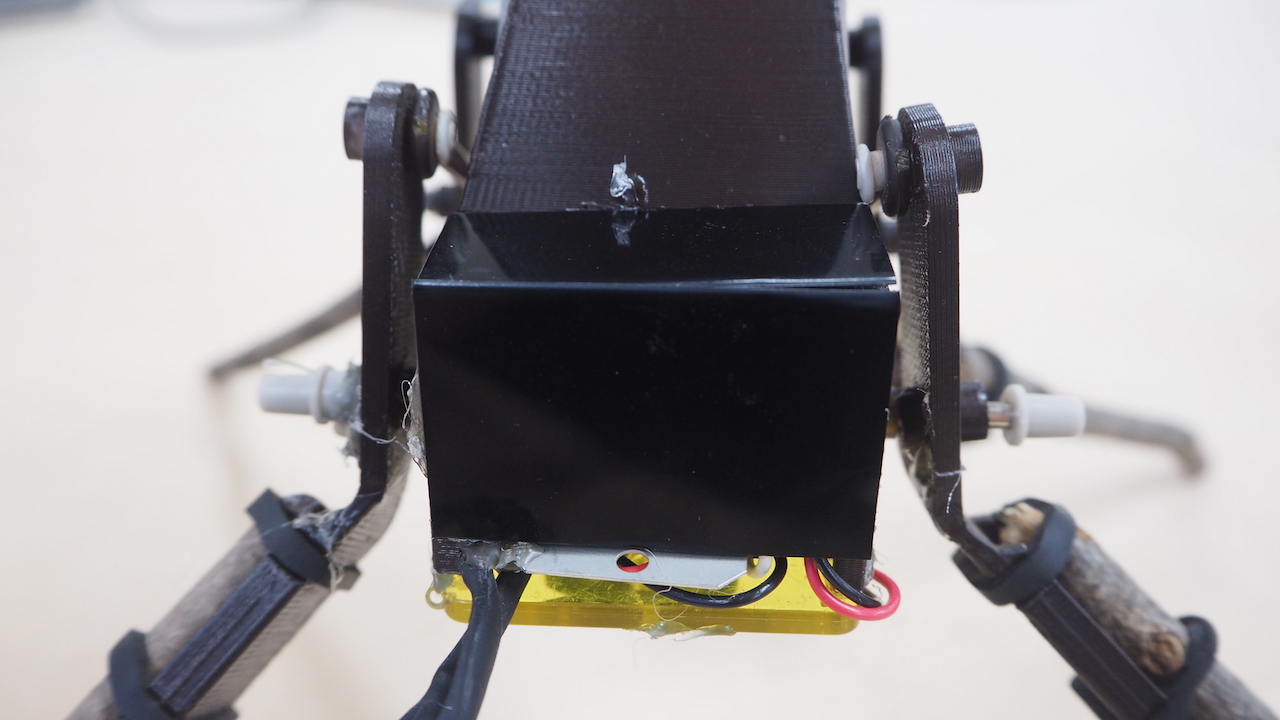
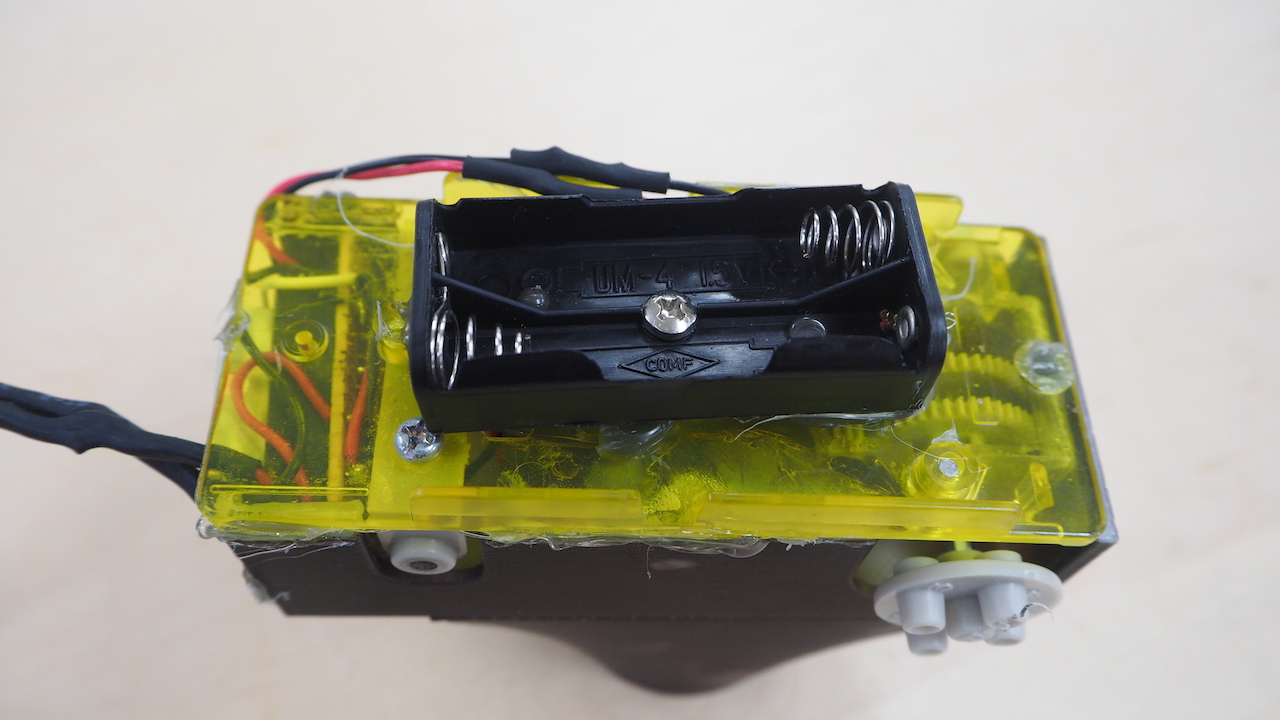
電池ボックスをギアボックス下に付ける
脚パーツをギアボックスに付ける

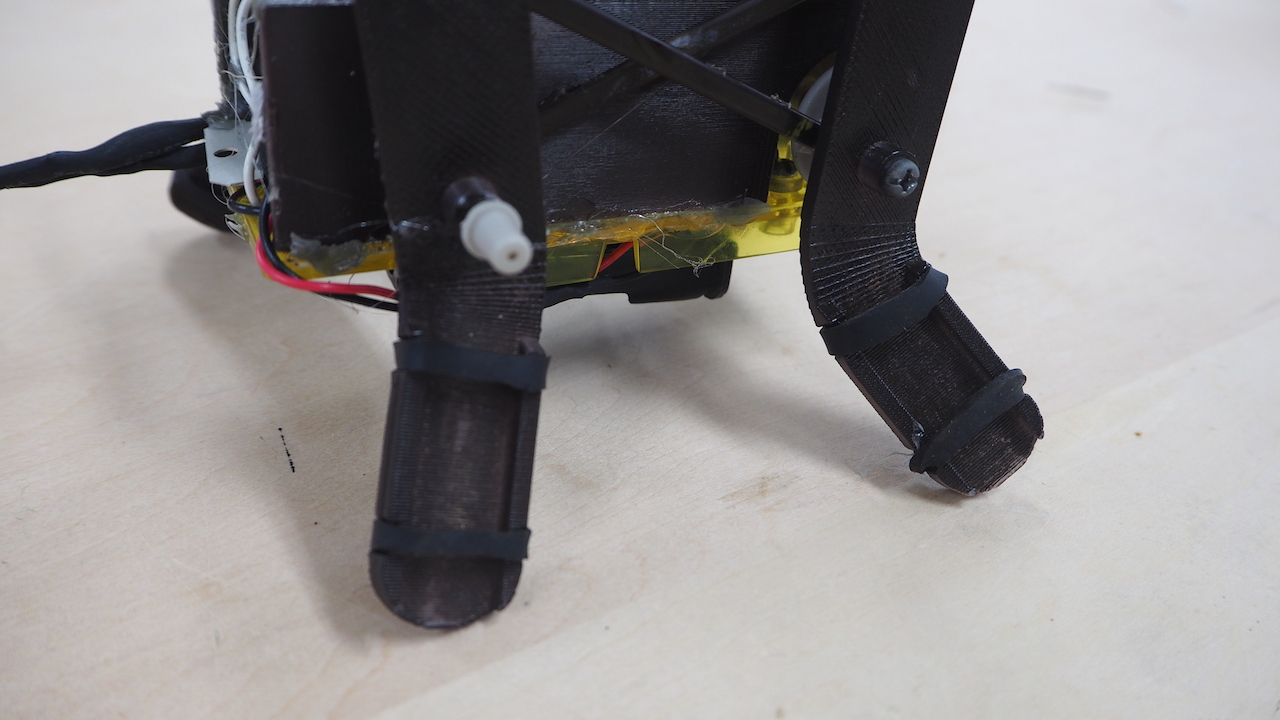
タミヤ メカキリンの説明書⑦〜⑨を参考にしながらギアボックスに造形した脚パーツを付ける。
脚パーツには、木の枝などを取り付けるための輪ゴムをはめる。
ゴムは何でも良いが、直径15mmのゴムチューブを輪切りにして使用した。
木の枝、植物を拾ってくる

公園や森で適切な長さの木の枝や花、草などを採取してくる。
植木鉢部分につける植物は、クッションシートなどで包んでいると入れやすい。
木の枝を脚につける

完成
