ギアボックスを組み立てる
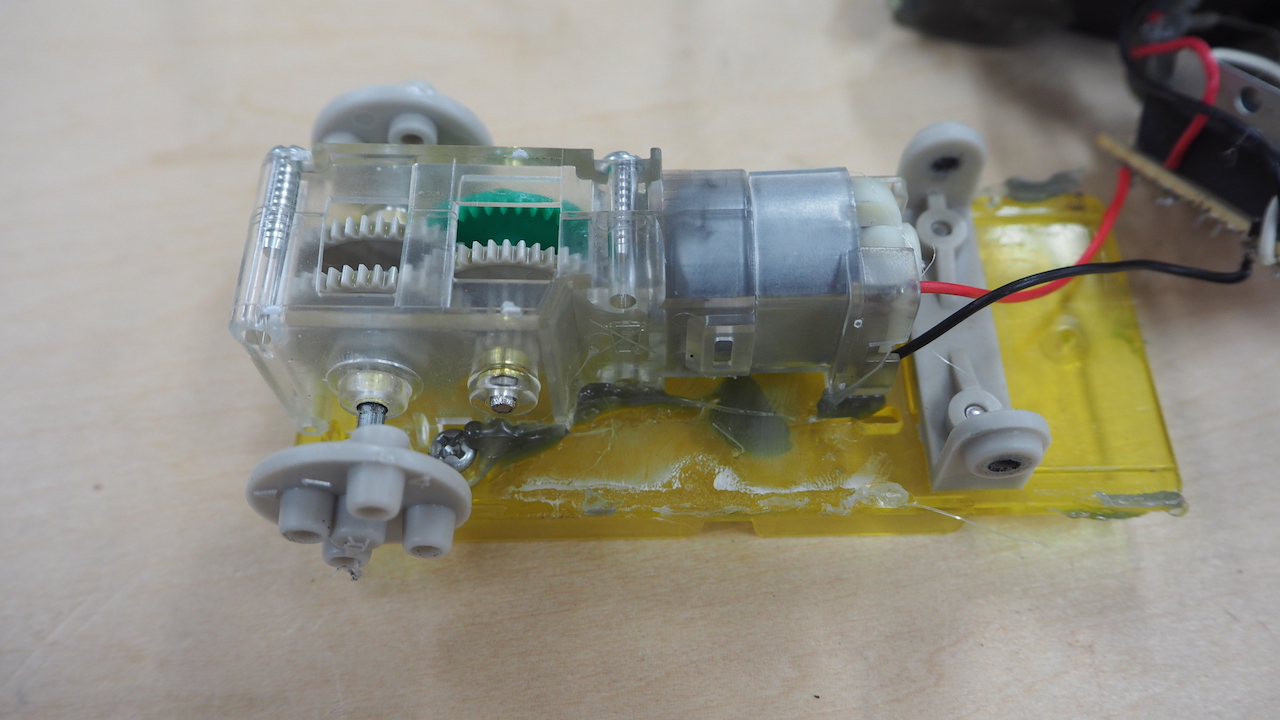
タミヤ ロボクラフトシリーズ メカキリンを開封し、説明書③〜⑤、⑦に従ってギアボックスを組み立てる。
このとき、逆転スイッチは使用しないので取り付けなくてよい。
また電池ボックスは後でマイコンに接続するので、モータとは配線しない。
※正常にギアが噛み合うか、電池をつなげて見て動作確認すると良い。
マイコン部分を組み立てる
ロボットの動きを制御するためのマイコン部分を作る。
今回は以下の部品を使用する。(代替品情報などあればコメントお願いします。レシピの最後にメモしてます。)
部品のハンダ付け
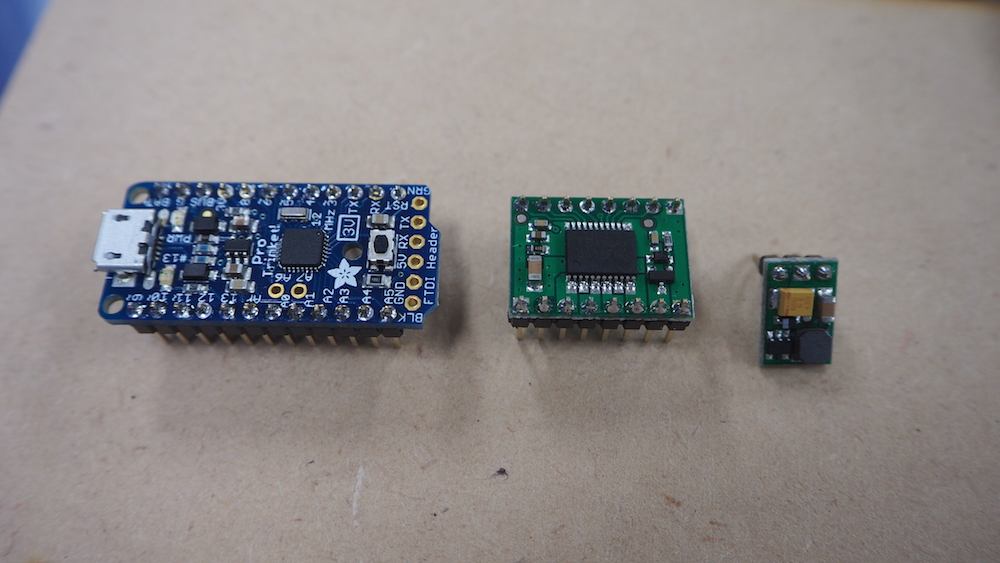
Trinket、モーダ―ドライバ、レギュレータにピンヘッダをハンダ付けする。
Trinketは全てピンを付ける必要はない。(画像のようにA6,A7,右側のFTDIの穴は開けたままにしましょう)
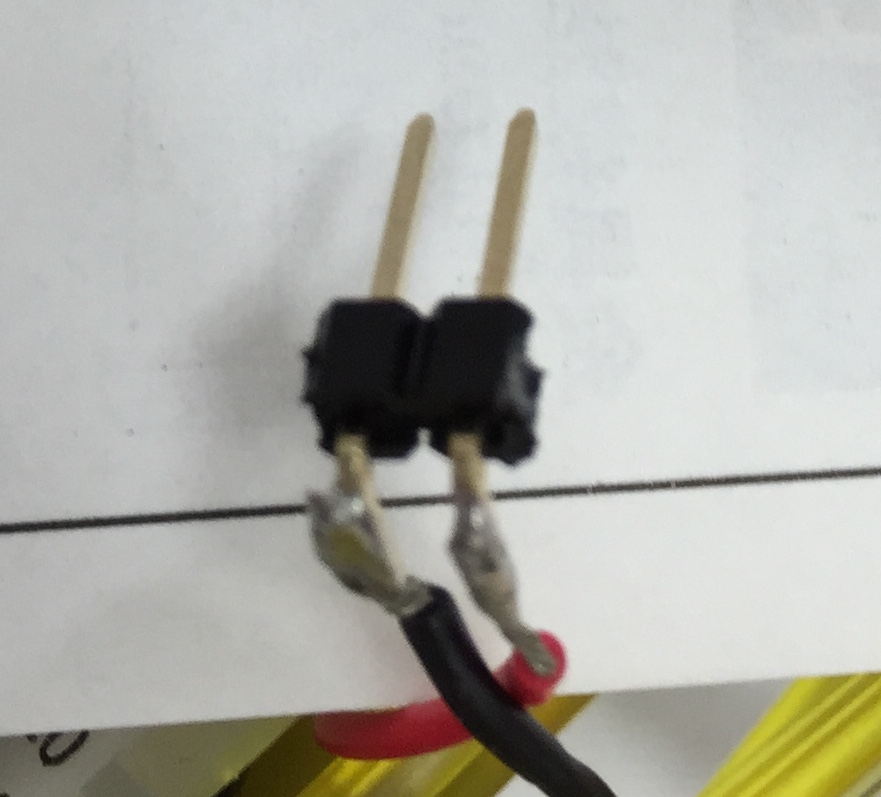
モータと電池ボックスのワイヤの先も、ピンヘッダ2本を付けておくとブレッドボードに刺しやすいのでつけておく。
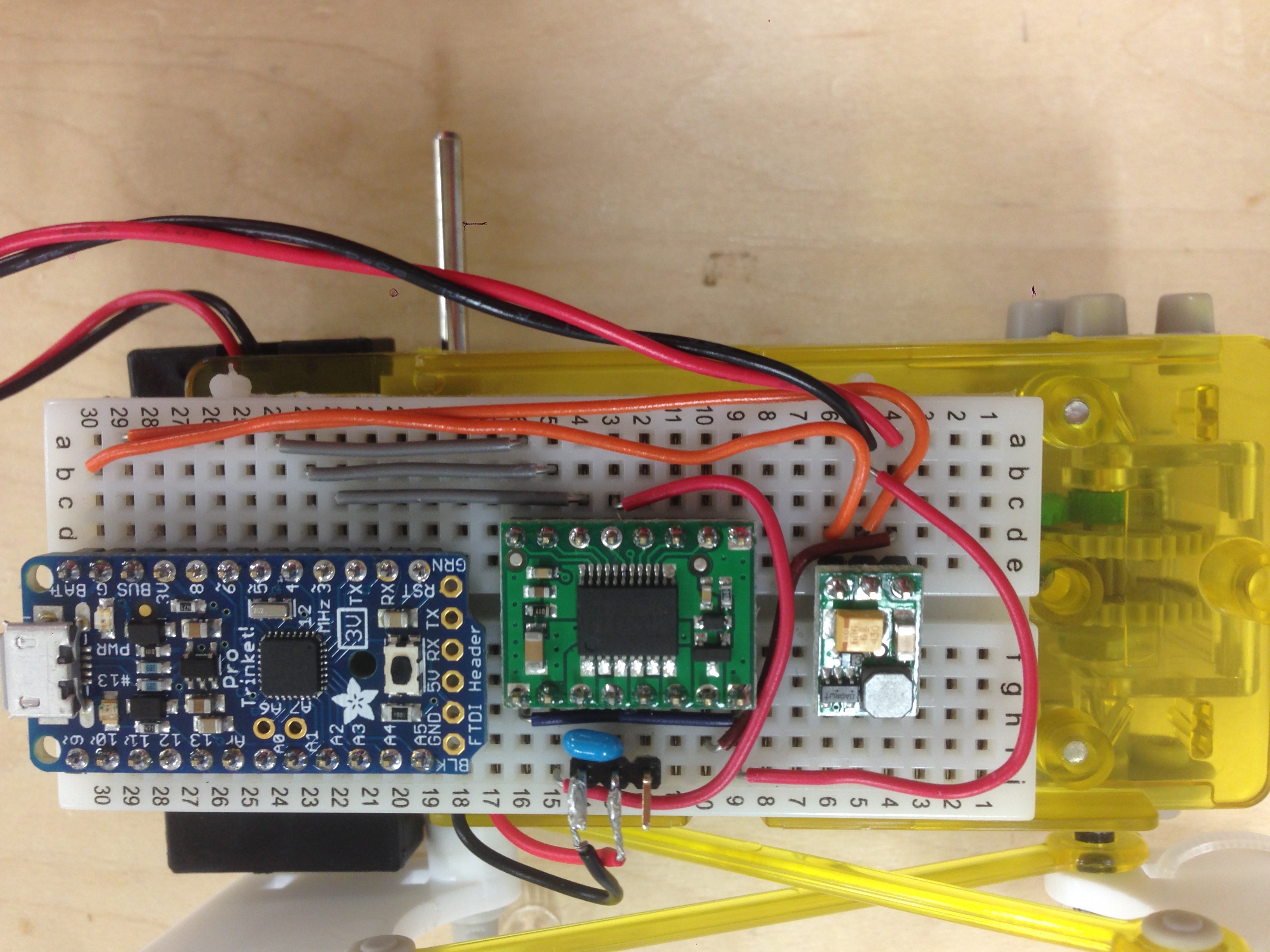
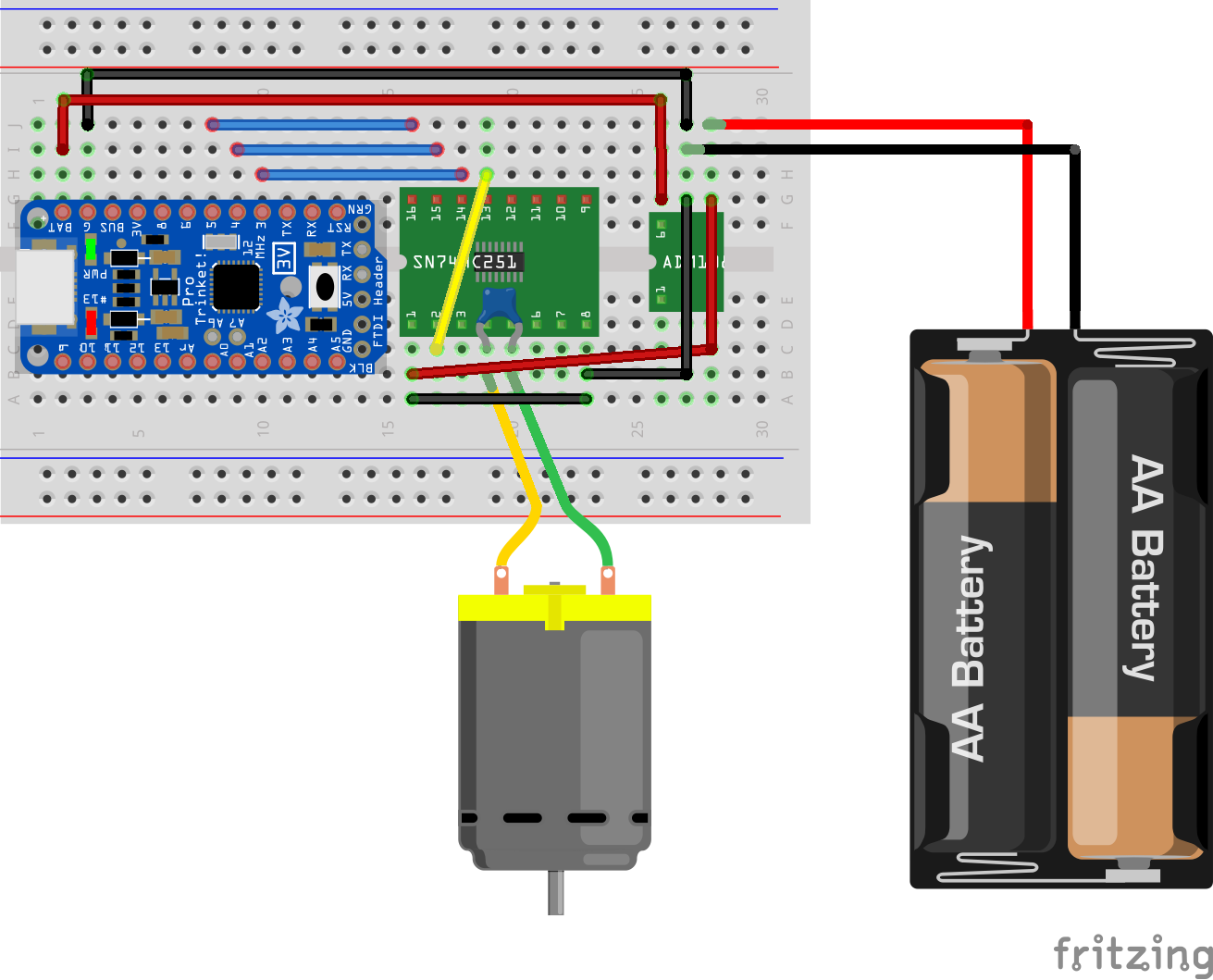
部品の配置
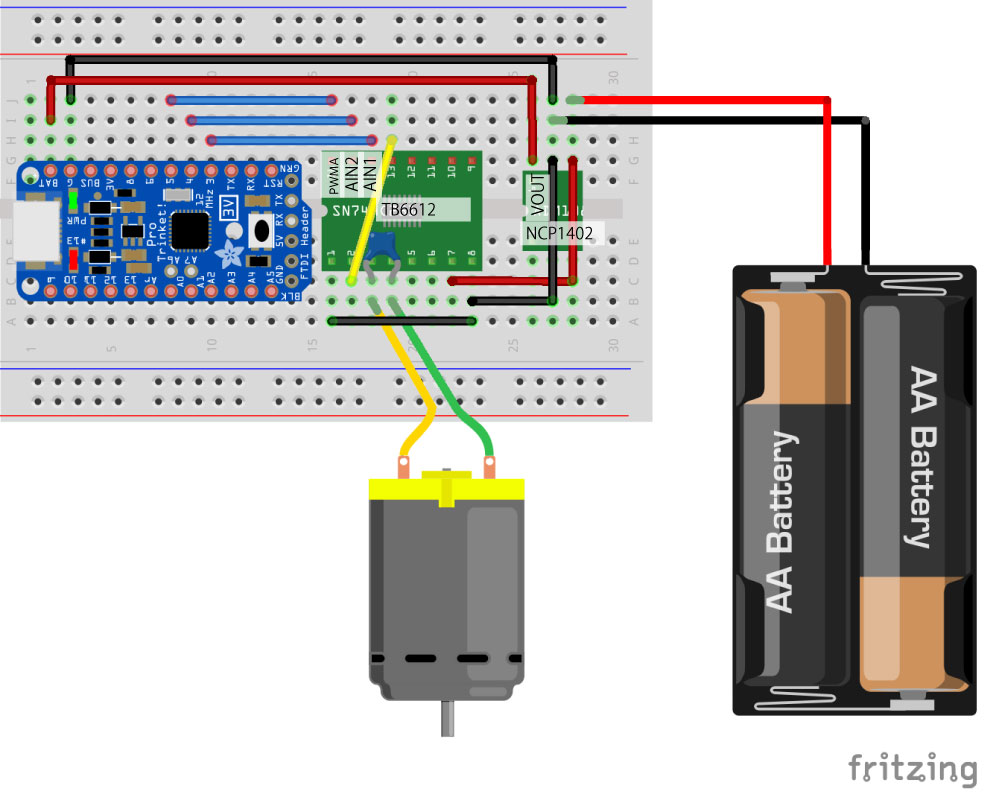
それぞれの部品を、回路図を参考に部品を配置する。(※向きに注意。前工程の写真や部品裏のピン名称を参照)
ブレッドボードは筺体のサイズに合わせるため、両端の二列は外しておく。
モータはギアボックスに取り付けられているので、後で配線する。
スケッチのアップロード
配置したら下記のスケッチプログラムをTrinketにアップロードする。
書き込み方
・通常のArduinoIDEにはTrinketのボードが選択できないのでこちらのIDEをダウンロードする。Arduino 1.6.x IDE
・IDEを開いたら、ツール->マイコンボードの中からPro Trinket 3V/12MHz(USB)を選択
・シリアルポートは選択しない
・ツール->書込装置からUSBtinyISP
・PCとtrinketをUSB2.0 A-miniBケーブルでつなげる。
・赤色LEDが明滅している間にアップロードボタンをクリック
スケッチプログラム
スケッチプログラムの中身
1.前進/スピード2002.後進/スピード100
3.前進/スピード200
4以降**speed**と**n**に値を代入して後ろに追加していけば挙動を変更可能
analogWrite(5, **speed**);
digitalWrite(3, LOW);
digitalWrite(4, HIGH);
delay(**n**);
memo : エラーが出て書き込めない場合
avrdude: Error: Could not find USBtiny device (0x1781/0xc9f)
が表示されて書き込めない場合、USBケーブルを抜き差しして、赤色LEDが明滅している間にアップロードボタンを押して下さい。
あるいはUSB2.0ケーブルを使用する必要があります。
電池ボックスを配置する
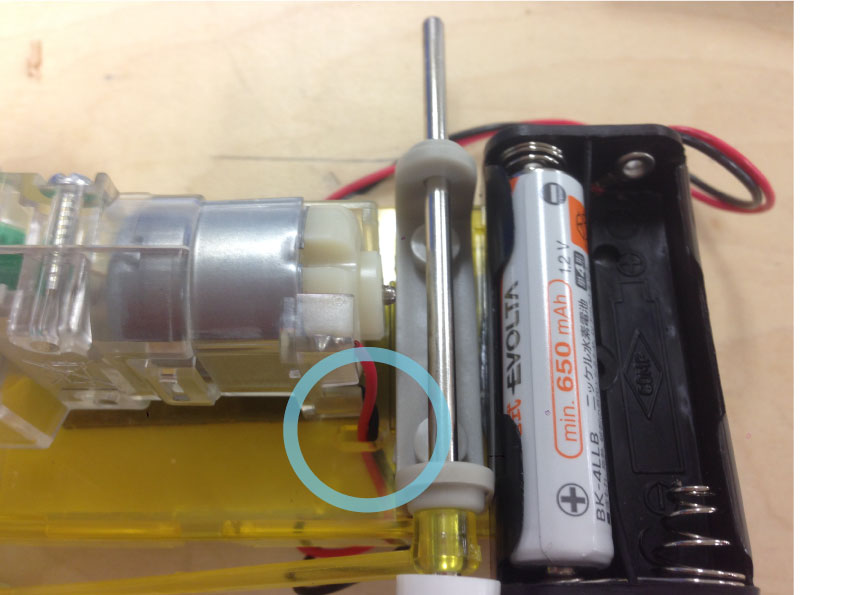
電池ボックスをギアボックス横に両面テープで付ける。
またモータの配線が短い場合は、写真の水色枠のように穴から通すと良い。
ブレッドボードをギアボックスに付ける
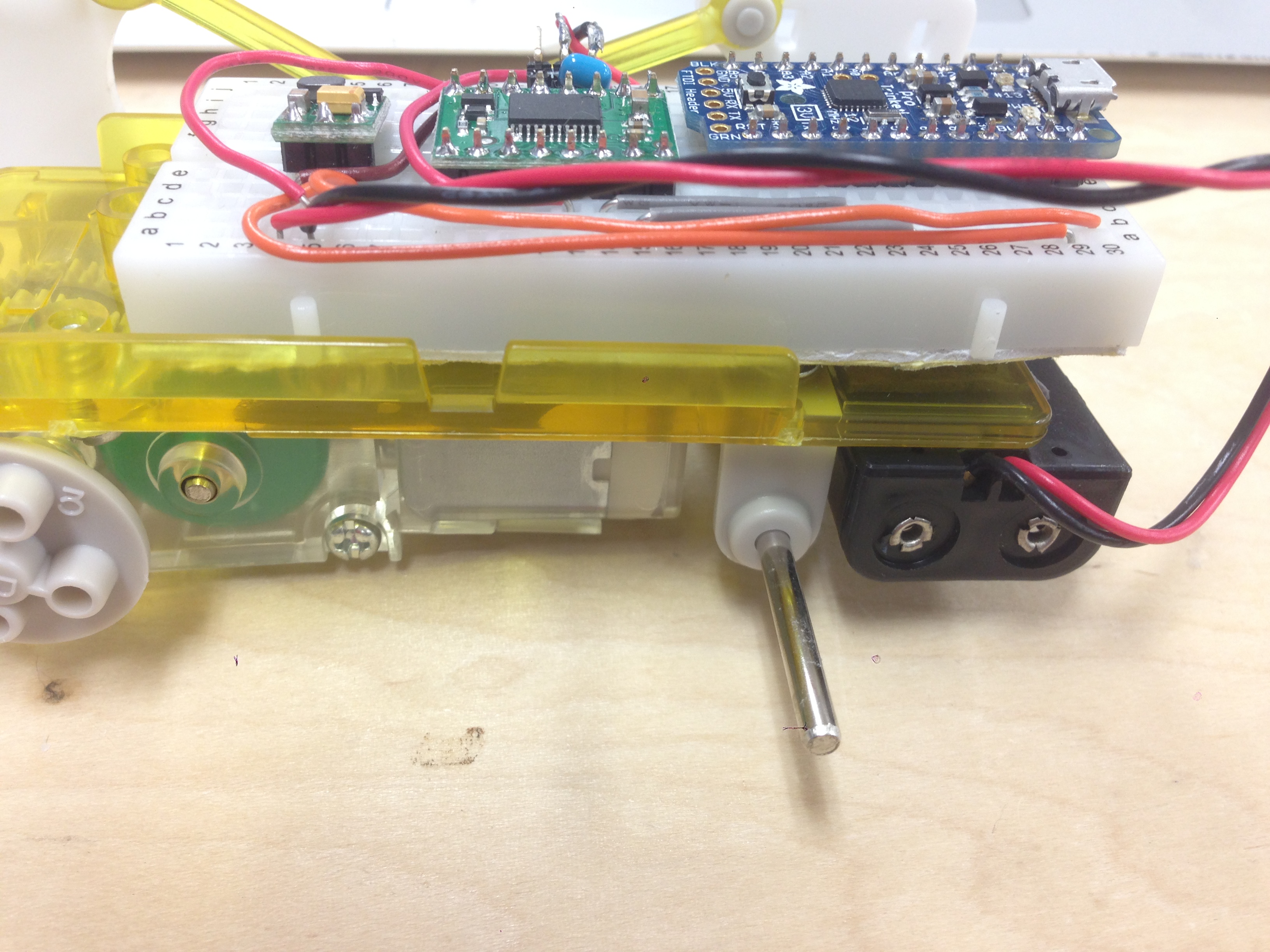
クッションタイプの厚手の両面テープでブレッドボードをギアボックスの裏につける。
※ネジ止めるところの出っ張りが接着の時に邪魔になるため、クッションタイプの両面テープを使ってとめる。出っ張りはニッパーで削ると止めやすい。
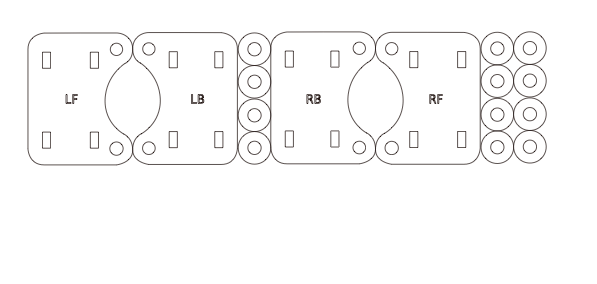
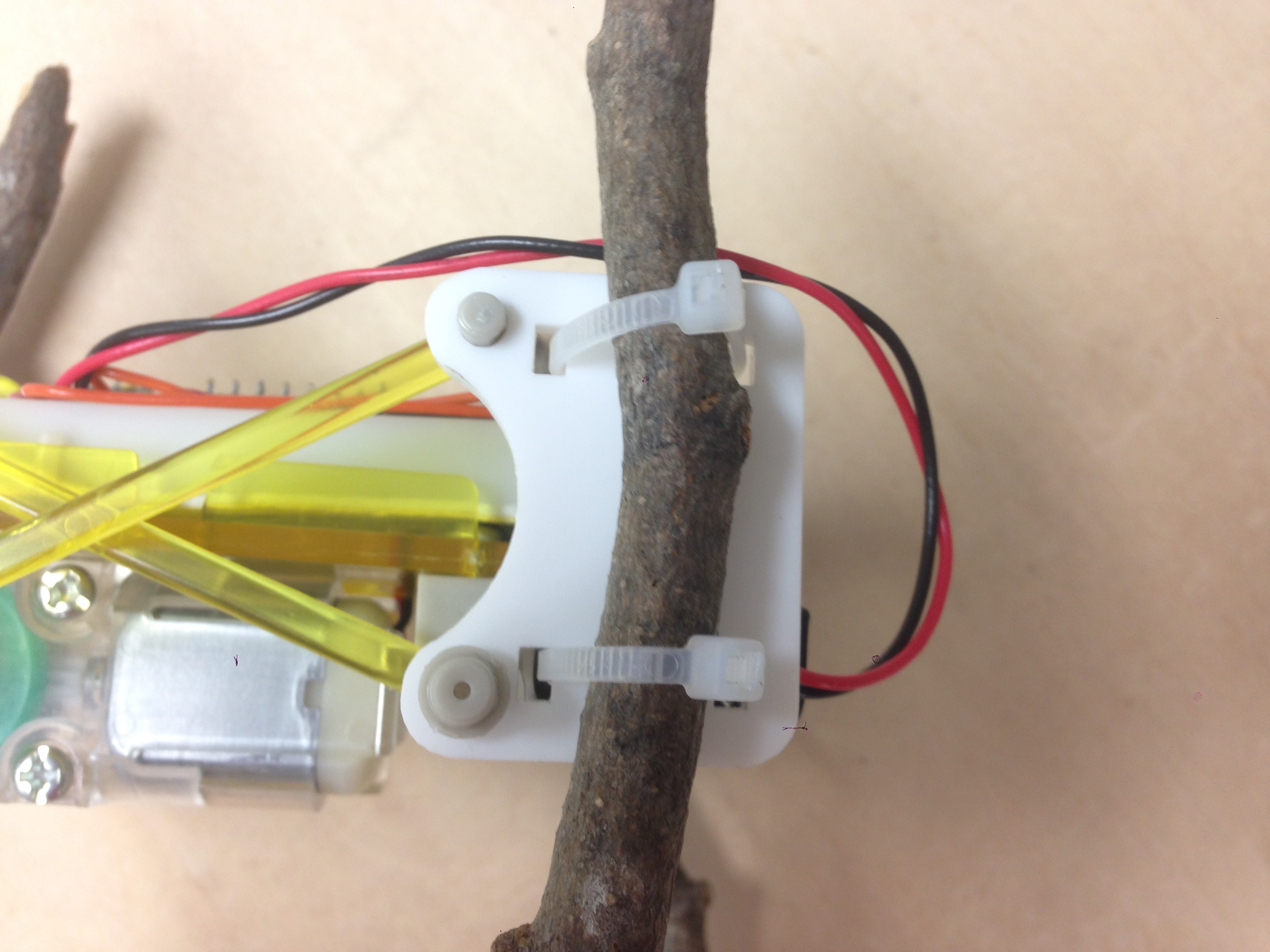
脚パーツをギアボックスに付ける
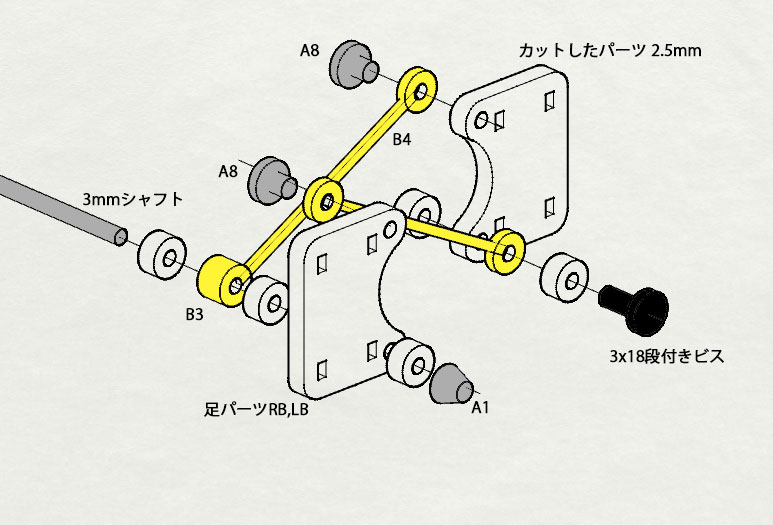
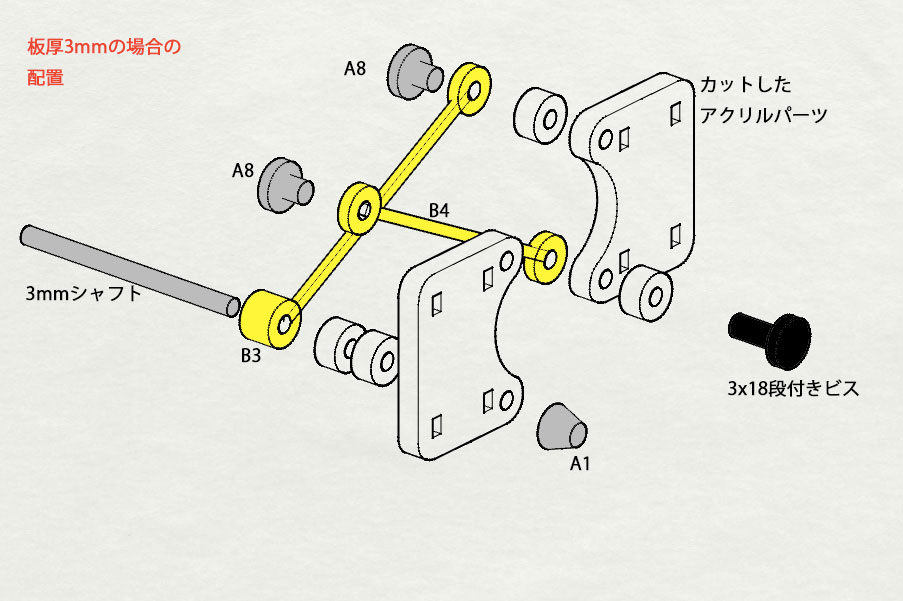
上図と、タミヤ メカキリンの説明書⑦〜⑨を参考にしながら、ギアボックスに、制作した足パーツとメカキリンのパーツを組み合わせて付ける。
グレーのパーツ(A8など)と脚パーツの穴は丁度なので止めにくい場合があり、ペンチを使うと止めやすい。
板厚3mmの場合はスペーサーの位置などが変わってくるので、念のため図を掲載してます。
※順番や向きに注意!
(A8パーツがきつすぎて入らない場合、M3のネジとナットを使うとよいです)
動きを確認する

完成
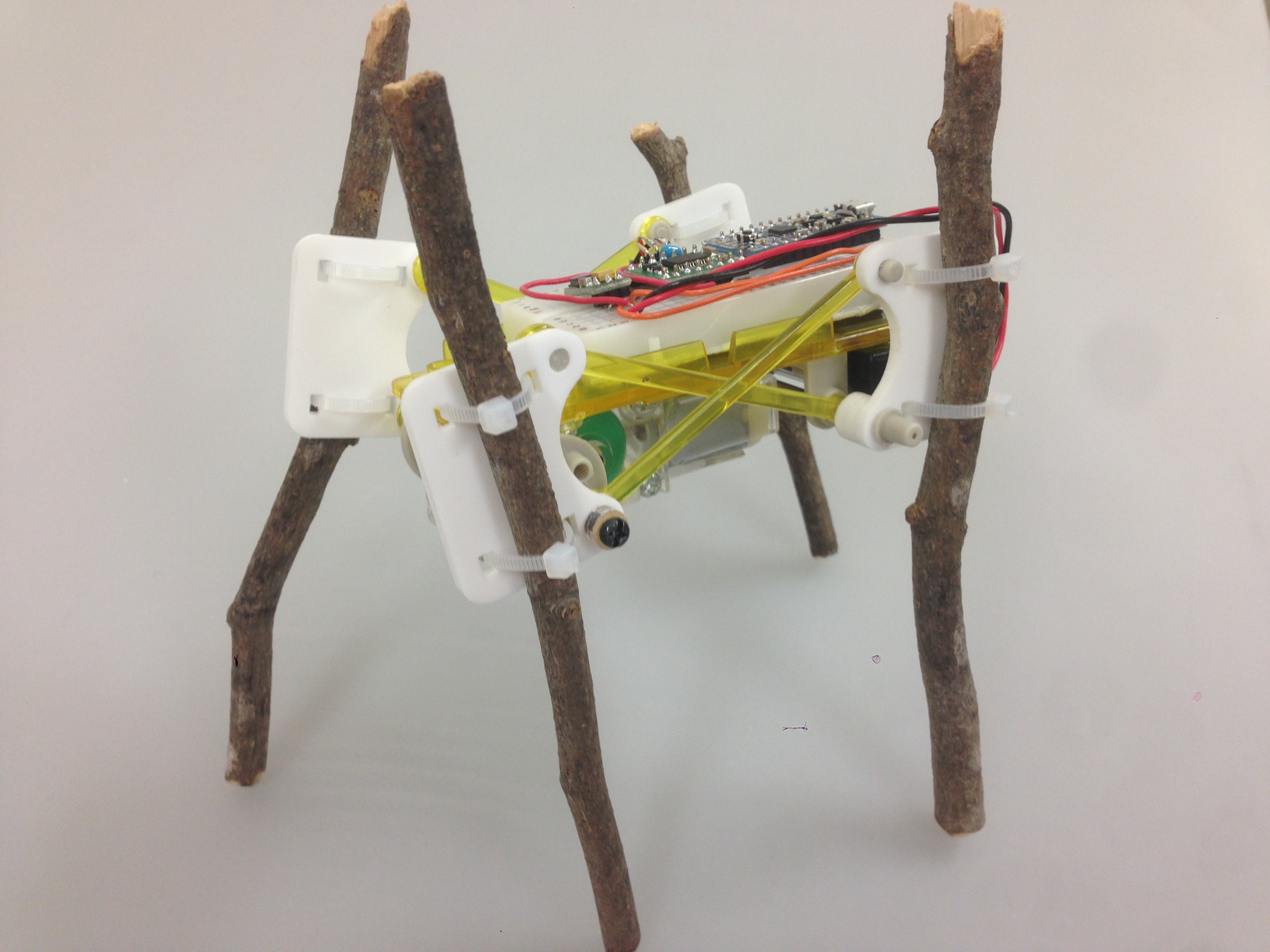
基板部分を隠すカバーなどを作るとより良くなると思います。
WalkingTreeバージョンでは植木鉢を置いて、植物を歩かせていました。
歩く様子
足の付け方や長さ、素材によって歩き方が変わってきます。
きちんと前進するベストな歩き方を探してみてください!
(動画はちょっと曲がりながら歩いてます。。)
補足:代替品情報
デュアル・モータードライバTB6612FNG(連続最大1.2A)
※代替品ドライバだとピン配列が若干違います。配線図は画像のようになります。
(まだ繋げてないので動かなかったらコメントおねがいします)
秋月のブレッドボード(こちらじゃないと両端の部分が取れない?)
応用編 光センサで動きを変える
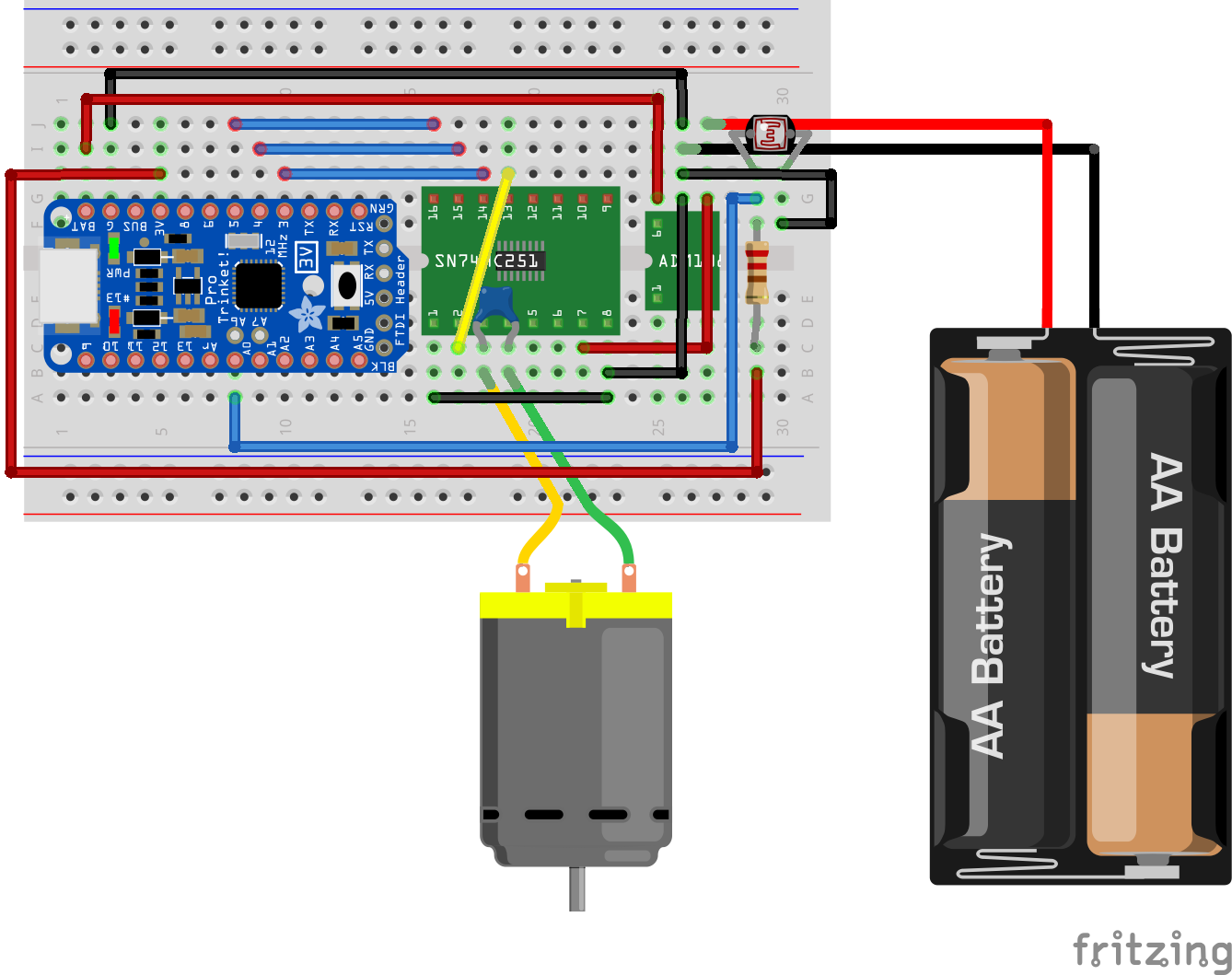
手をかざしたりして暗くすると、後進するようにプログラムする。
回路メモ:CDS http://akizukidenshi.com/catalog/g/gI-00110/
抵抗 1kΩ
プログラム:if(sensorValue > 600)
の600は環境によって変化するので、調整する。
ArduinoサンプルプログラムのAnalogReadSerialで値をモニタリングすると良い。