はじめに
私たちのチームは、海洋問題、コミュニティ、いじめ問題など、メンバーそれぞれが異なる課題に関心を持っていた。そこで、ブレインストーミングを通して何度も話し合いを重ね、「鎌倉にはどのような問題があるのか」をメンバー全員で真剣に考えた。その結果、「鎌倉を綺麗に保ちたい」という共通の思いにたどり着いた。この思いを出発点として、具体的な課題の特定に取り組んだ。
ポイ捨てに着目
鎌倉を綺麗に保つにはどうしたらよいのか話し合った結果、私たちは「ポイ捨て」に注目した。さらに鎌倉にはゴミ箱が少ないという現状を踏まえ、「ゴミ箱を増やすのではなく、容量を増やせばポイ捨ての減少につながるのではないか」という仮説を立てた。
幻のプロトタイプ
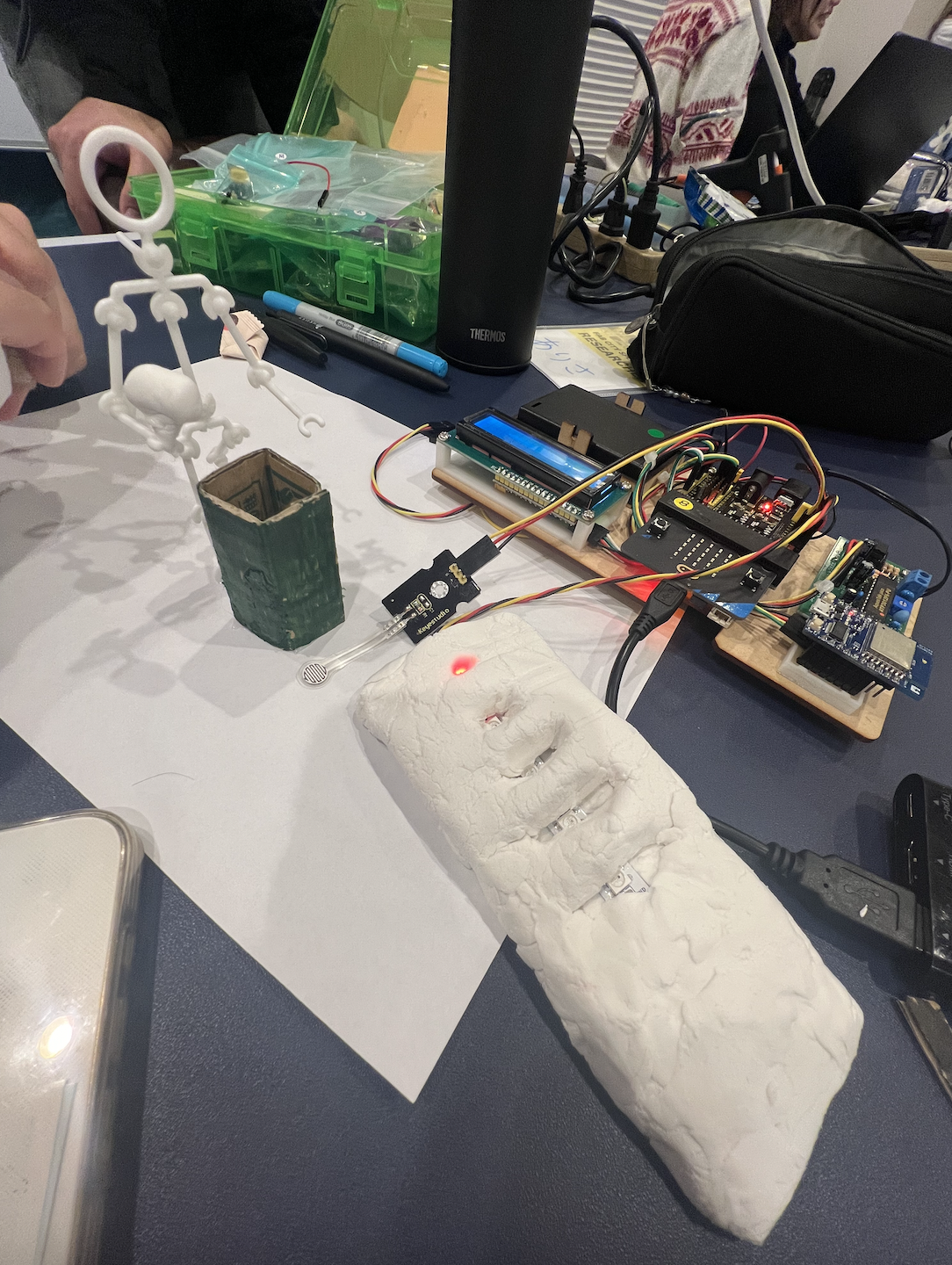
この仮説をもとに、観光客が多い小町通りではポイ捨てが多く、ゴミ箱が少ないため一つのゴミ箱にゴミが集中してしまい、ゴミが捨てられないという状況があると考えた。そこで、忙しい小町通り店舗をターゲットとし、店側がゴミ袋を交換して対策するのではなく、来店客自身がゴミを圧縮することでゴミ箱の容量を増やすプロダクトを考案した。どのようにすれば来店客が主体的にゴミを圧縮するのか検討した結果、ゲーム性が必要という結論に至った。そして完成したのが「ミニトラッシュクラッシャー」である。これはハンマーを使ってゴミを圧縮し、その力をネオピクセルライトで可視化することで、他の客や友人などと競うことができる仕組みである。
小町通りでのインタビュー
ミニトラッシュクラッシャーの需要が本当にあるのかを確かめるために小町通りのお店に実際にインタビューを行った。その結果、ゴミ箱の交換頻度は1日約一回でゴミ箱の容量に困っている様子は散見できなかった。さらに、小町通りを観察したところポイ捨ては見られず、、ゴミが一つも落ちている様子も確認できなかった。また、ゴミ箱が設置してされている店舗では店内奥に置かれており、溢れかえっている状況もなかった。これらの結果から、当初の仮説とは異なる実態が明らかとなり、ミニトラッシュクラッシャーの需要は全くないことに気付かされた。
ヘイセイズとの出会い

鎌倉のゴミの清掃の実態を把握するために、毎週土曜日の朝8時から活動している「ヘイセイズ」の方々と共にゴミ拾いに参加した。さらに代表者である上岡さんにインタビューを行った。
その結果、①人通りが少ないところにゴミが捨てられている。②若い世代が来ない世代を超えた交流が少ない。③タバコのゴミが一番多いという3点が明らかになった。
プロトタイプに至るまで
私たちが当初立てた仮説は適切ではなく、ヘイセイズやインタビューを通して、鎌倉におけるゴミ問題の実態はこれまでの想定とは異なるとなるものであることが明らかになった。その結果、どの課題に焦点を当てるべきか分からなくなった。そこで私たちは、ヘイセイズで得た知見の中でも、若い世代や新しいメンバーの参加が少なく、世代を超えた交流が不足しているという点に注目した。さらに、若い世代の中でも特に小学生に着目し、ベルマーク集めの経験に着想を得た。そして、ペットボトルのラベルについているベルマークに注目し、ペットボトルを捨てるまでの過程に着目した。
プロトタイプzero
使い方
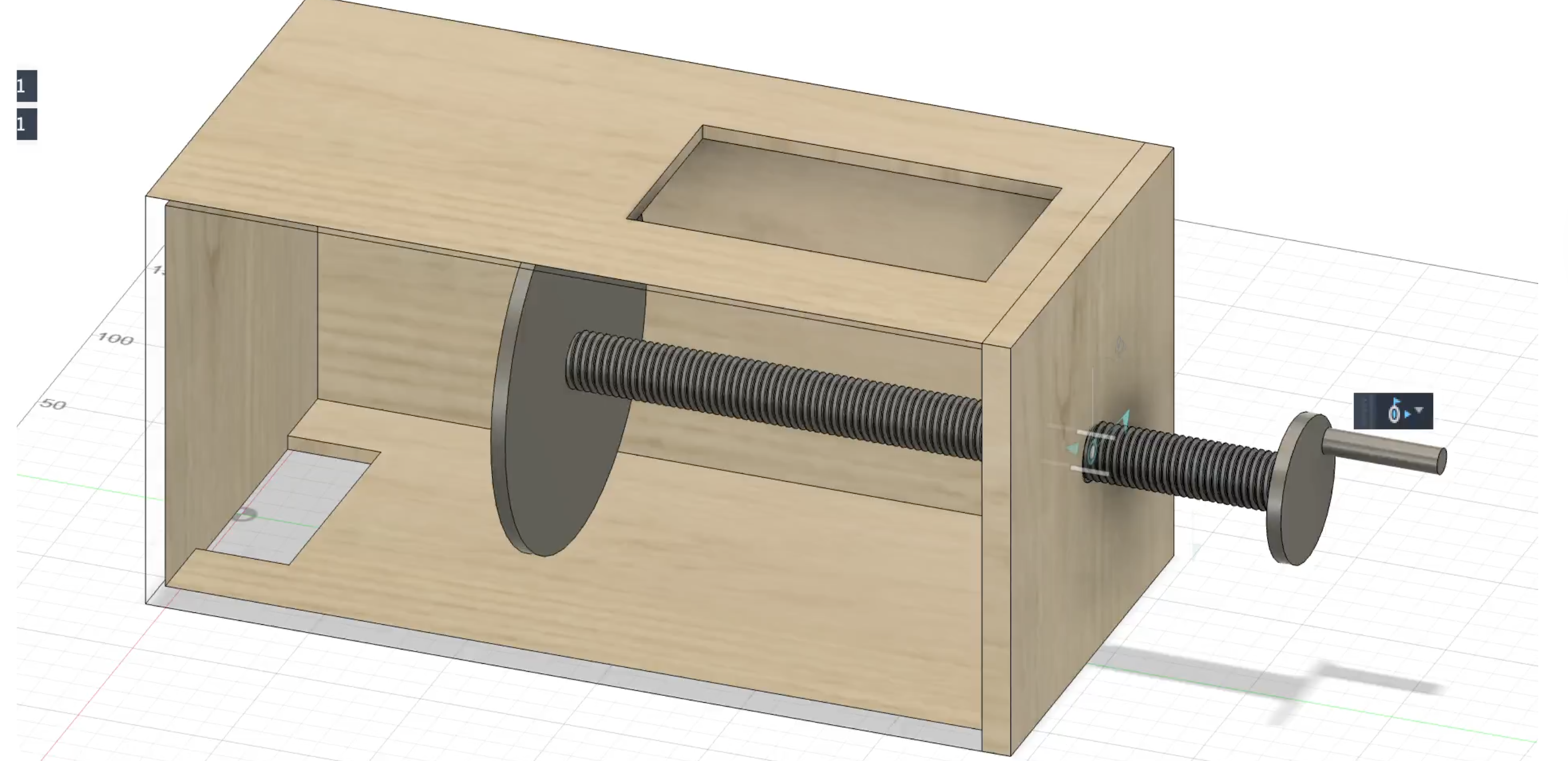
ペットボトルを飲み終えた後、レストランに持ち込み、キャップを外して装置内に設置し、ハンドルを回すことでペットボトルを潰すことができる仕組みになっている。また、どの程度潰すことができたかは、ネオピクセルライトで表示される。このように、レストランのような地域住民が集まるような場所で自分自身がペットボトルを潰すことで、ゴミへの関心が高まり、地域内のつながりの創出にもつながるのではないかと考えた。
課題点
しかし、このプロダクトは12月の中間審査の時点では実際に設置できておらず、あくまで構想段階にとどまっていた。また、ターゲットも明確ではなく、対象となる人々が本当に困っているのかも不明確であった。さらに、鎌倉駅周辺や小町通りではゴミ箱自体が少なく、捨てられているゴミも竹串などの嵩張らないものが多く見られた。そのため、ゴミ箱には比較的余裕があり、容量不足が問題となっている状況ではなかった。これらの点を踏まえて中間発表後に再検討を行った結果、本プロダクトの有効性は低い可能性があるという結論に至った。この結果を受け、私たちは課題設定から見直す必要があると判断した。
新たなるテーマ
私たちはテーマ決めから見直すことにした。全く新しいテーマにすることも検討し、チーム内で議論を重ねた。しかし、「鎌倉を綺麗に保ちたい」という思いは変わらず、この目標を軸に取り組みを進めていくことに決めた。
旧大佛亭次郎亭をターゲットに
そこでヘイセイズのゴミ拾いを行った場所、旧大佛次郎亭に着目した。旧大佛亭は鎌倉にも多く存在する文化財の一つであり、かつては大佛次郎さんによって管理されていたが、現在は一般の管理者によって維持されている。市が管理しているわけではない為、維持管理の負担が個人に委ねられている。また、周辺には空き家に面した暗い路地が複数存在しており、そこには食べ物のゴミやタバコのポイ捨てが見られる。特にタバコは火災につながる危険性がある。こうした状況から、景観の維持と火災のリスクの低減の両面から文化財を守る必要があると考え、旧大佛次郎亭をターゲットにすることにした。
インタビュー

大佛亭のおかみさんにインタビューを行った。その結果、裏道におけるタバコなどのゴミのポイ捨てに困っていることが明らかになった。また、監視カメラの設置も検討していたが、重要文化財である大佛亭の景観が損なわれる可能性があるため、導入を迷っているとのことであった。
1st プロトタイプ
「ヘイセイズ」のゴミ拾いに参加した際、人目の少ない場所ほど、ポイ捨てが多いことが確認された。このことから、周囲の視線が少ない、つまり、人の心の隙が現れるような状況においてポイ捨てを行いやすいのではないかと考えた。そこで、ポイ捨てを減らすためには、まず鎌倉の住民のゴミに対する意識を高めることが重要である。そのため、人(特に小学生などの若い世代)が集まりやすいレストランなどに設置できる装置として、ペットボトルを自ら潰してからゴミ箱に捨てる「トラッシュクラッシャー」を制作した。
材料
- 3Dプリンター
- ダンボール
- micro:bit
- 人感センサー
- サーボモータ
- スピーカー
- ネオピクセルLED
- マイクロSDカード
- カードリーダー
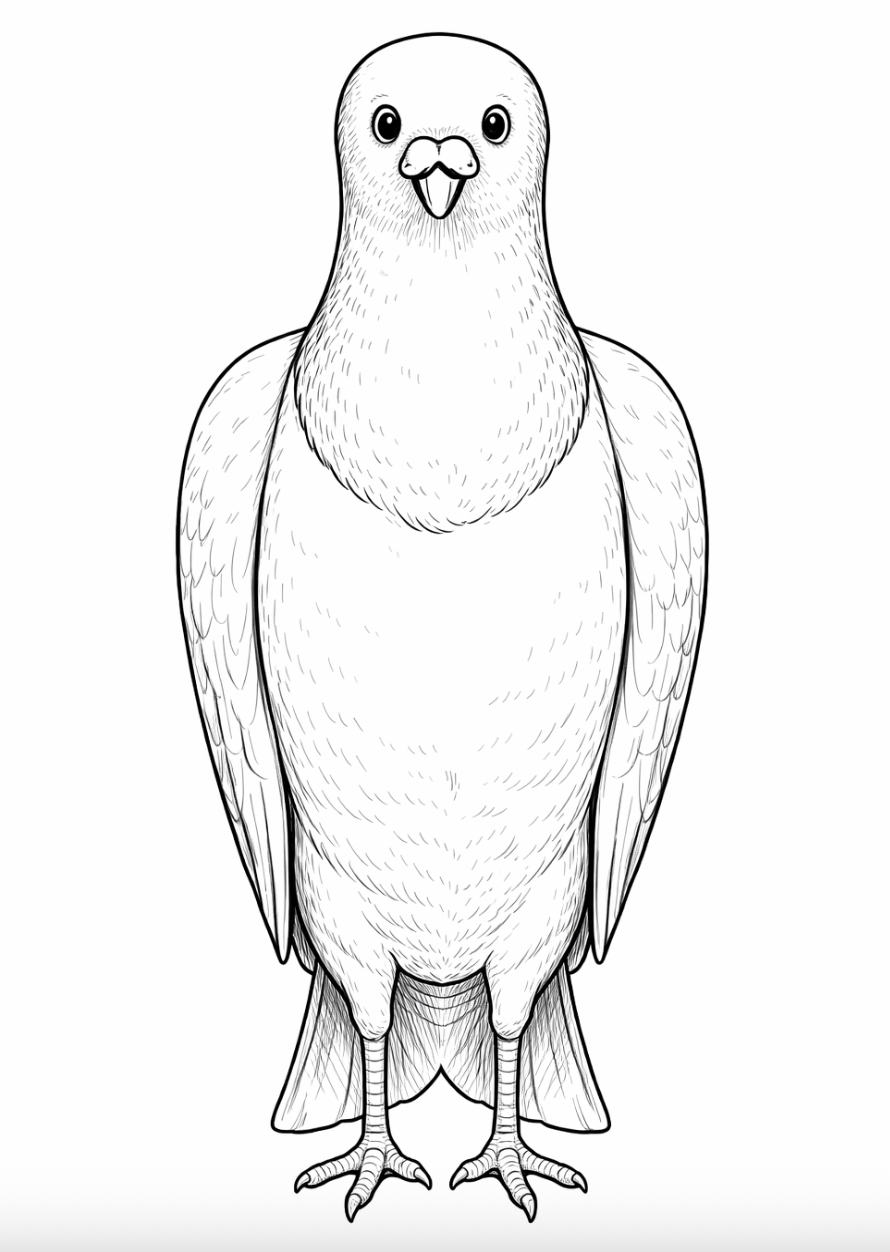
ハトのモデリングを作った流れ
Step 1
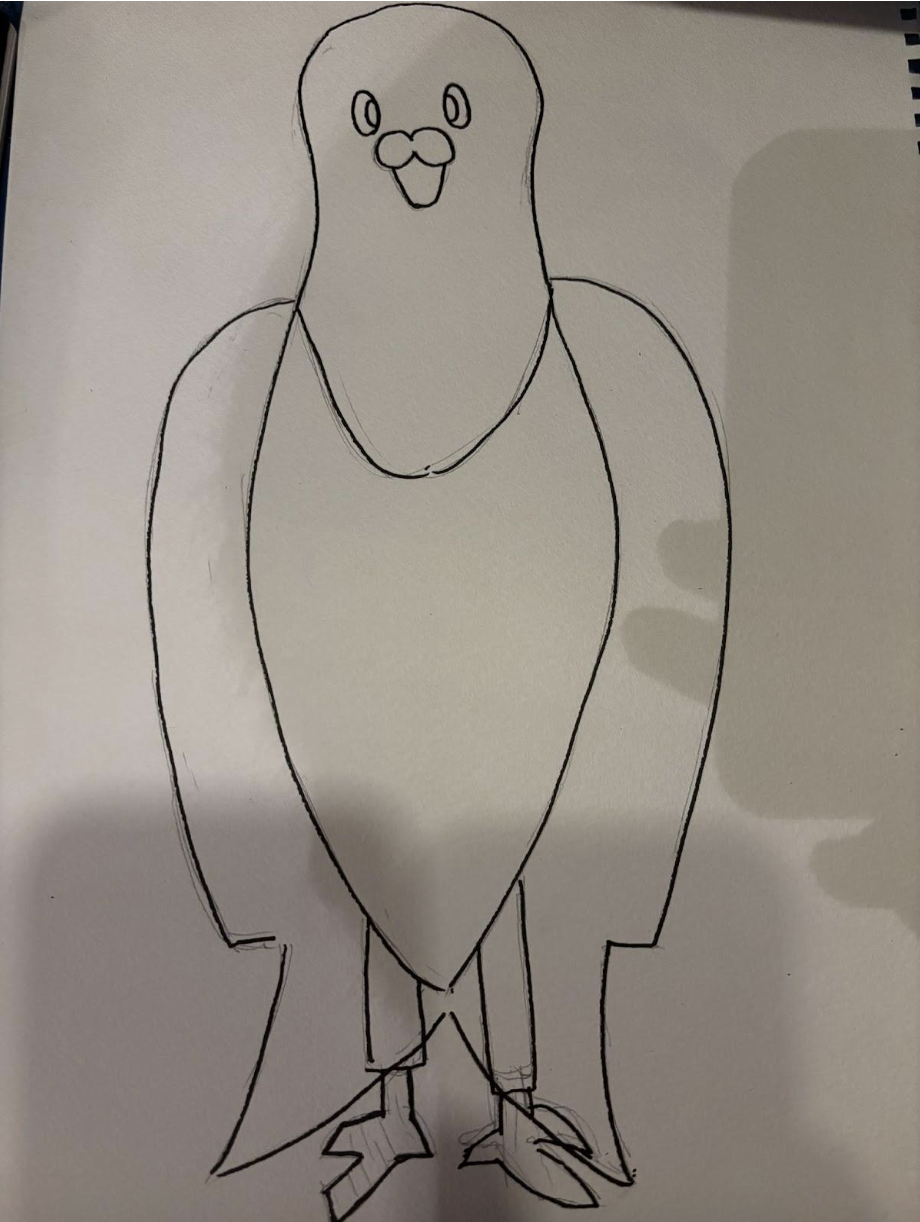
作りたいモデルのイメージを、紙に2Dのスケッチとして描く。
Step 2
そのスケッチ画像を ChatGPT などの画像生成AI に入力し、線の補正や着色を行い、より鮮明な画像にする。
Step 3
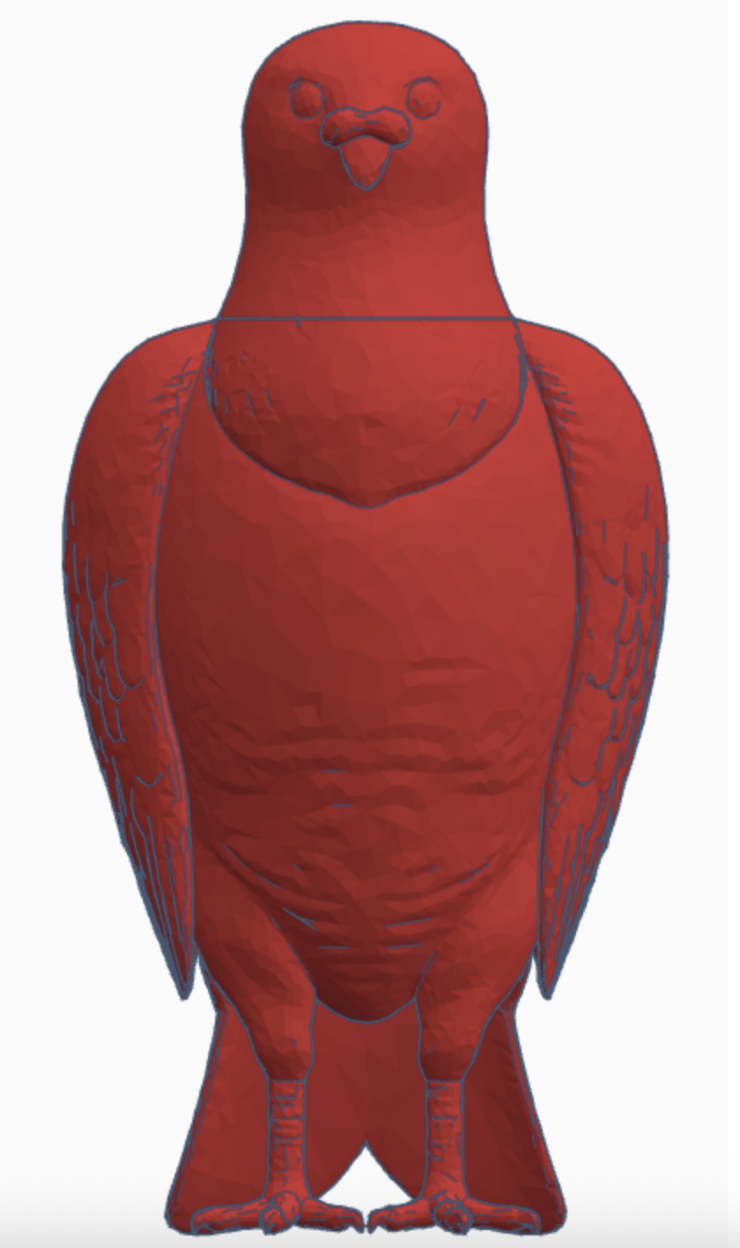
3Dモデリング生成AI を用いて、Step2で作成した画像をもとに3Dモデルを生成する。
Step 4
生成した3Dモデルを Tinkercad にインポートし、編集を行う。
Step 5
モデルの頭部と胴体を、それぞれ独立したパーツに分割する。
Step 6
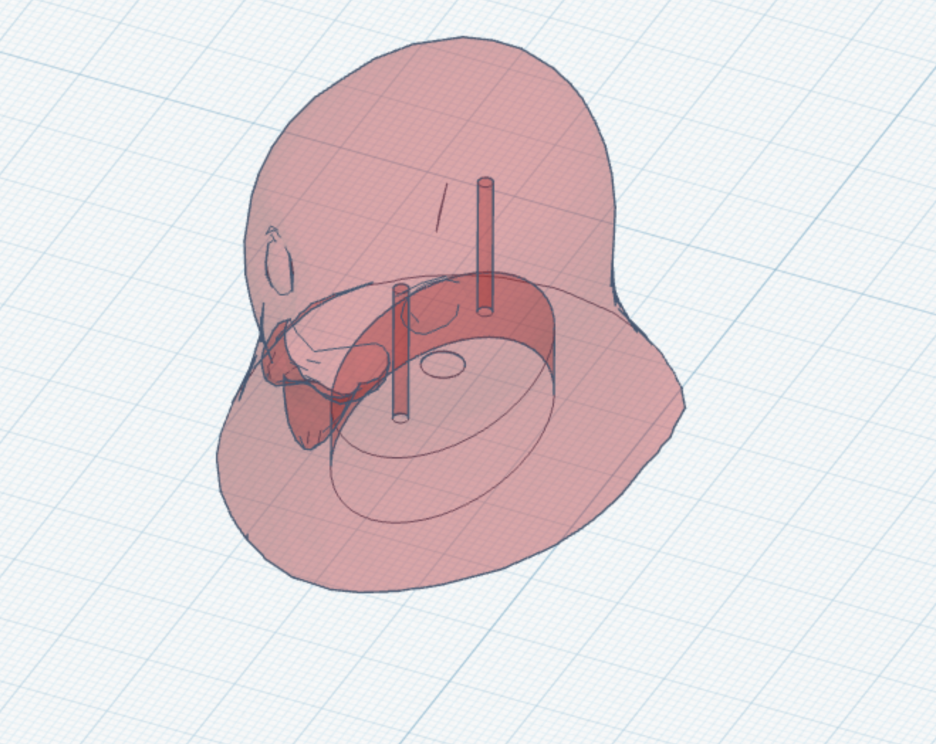
必要な箇所に穴や空洞を設計する。
理由: ・サーボモーターを格納するためのスペース確保
・ネオピクセルライトを組み込むためのスペース確保
・ネジ穴の作成
・配線を通すための通路の設計
・ネジ穴の作成
・配線を通すための通路の設計
Step 7

完成したモデルを3Dプリンターで出力し、完成とする。
プログラミングについて
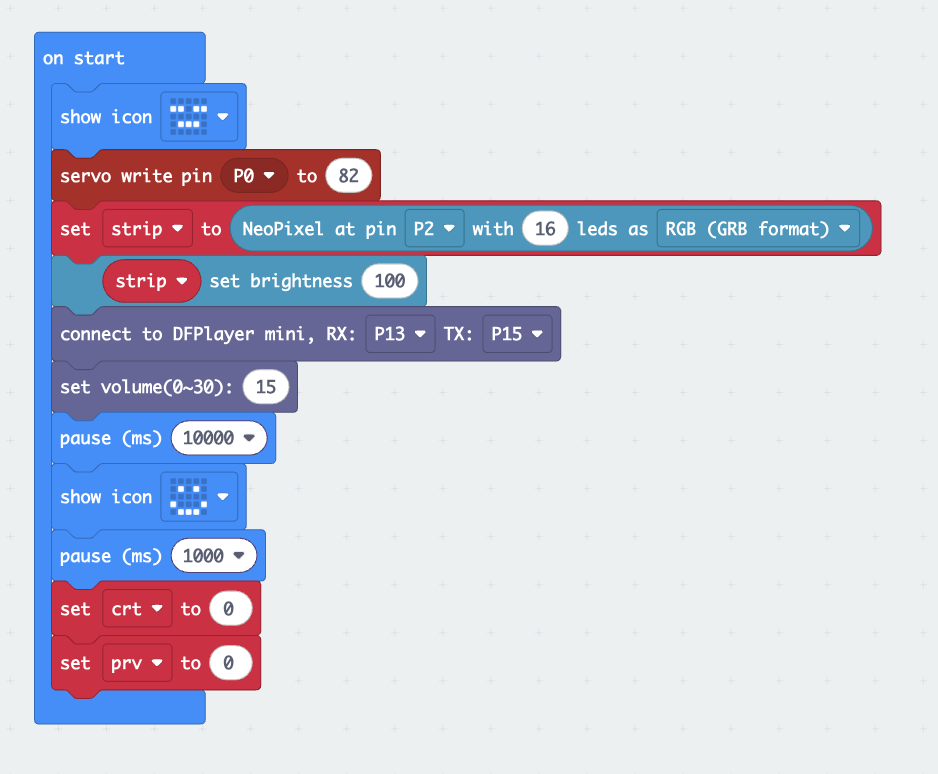
以下のプログラムを組んだ。
インプットとアウトプット
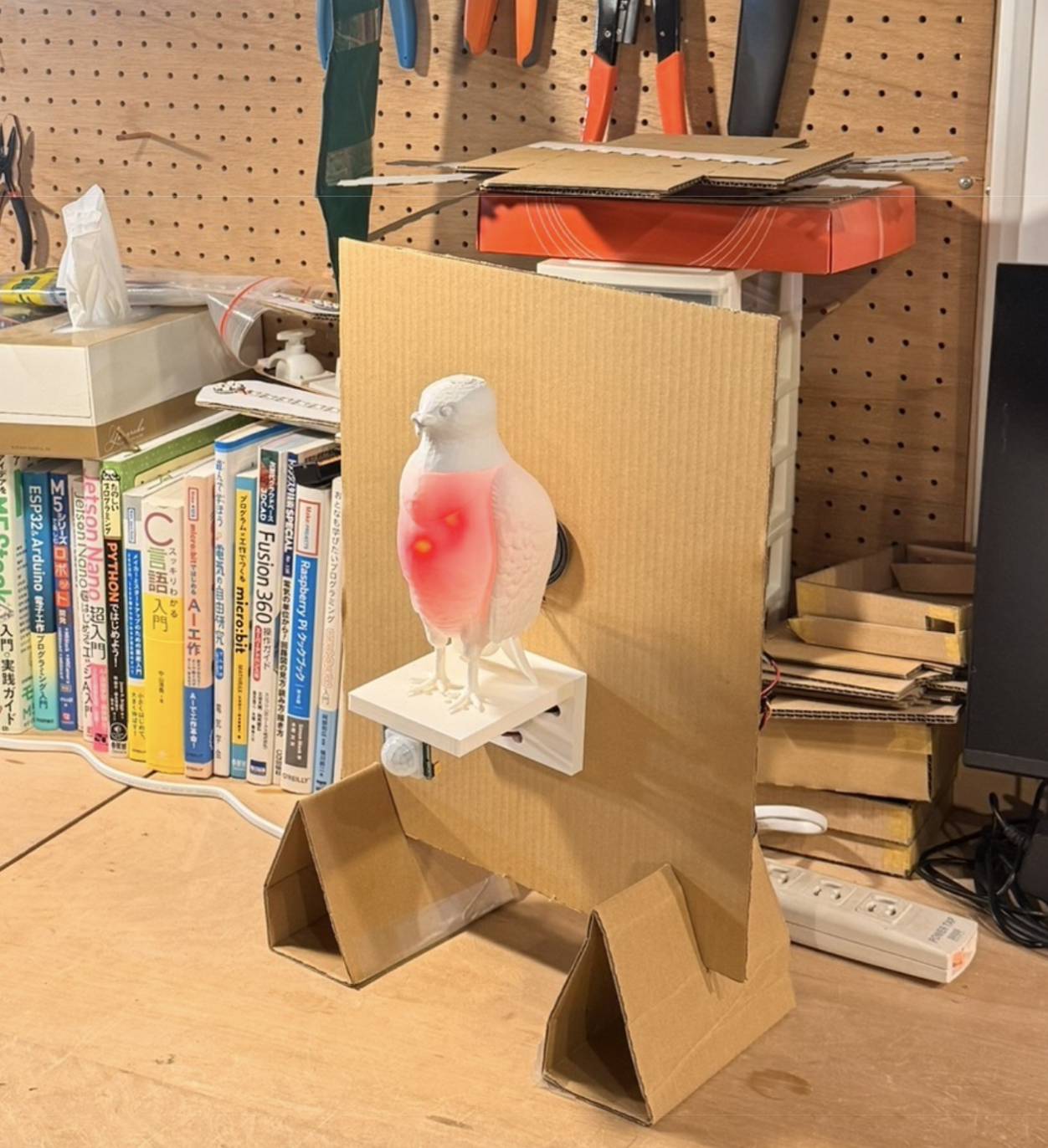
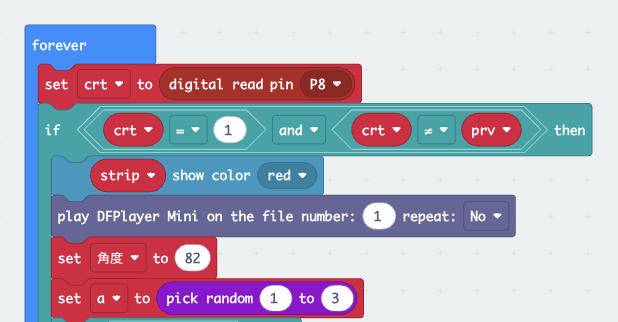
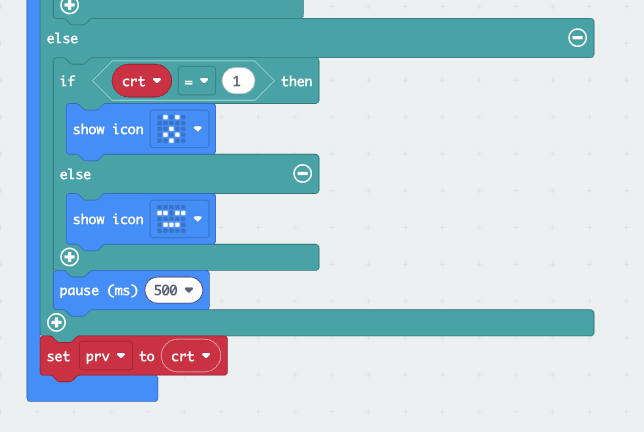
人感センサーにより人の接近を検知すると、システムが起動する。起動時には、鳩の胸が赤く発光し、microbitのLEDディスプレイがニコッとした笑顔が表示させると共に、鳩の首が動作する。
インプット:人感センサーによる人の接近を検知。
アウトプット:鳩の首が3パターンの動きをランダムに行い、胸部の発行およびLEDディスプレイによる表情表示がなされる。
インプット:人感センサーによる人の接近を検知。
アウトプット:鳩の首が3パターンの動きをランダムに行い、胸部の発行およびLEDディスプレイによる表情表示がなされる。
なぜ鳩にしたのか
文化財は歴史的背景を有しているため、防犯カメラのような近代的な機器を設置すると景観が損なう可能性がある。そこで、景観に調和するモチーフについて検討した結果、鎌倉に馴染み深い鳩であれば、大佛亭の路地に面する木々や周囲の環境にも自然に溶け込めるのではないかと考え、採用した。
2nd プロトタイプ


私たちが作った1stプロトタイプには幾つかの課題が見られた。
- 防水機能が備わっていない。
- 首の動きが単調である。
ハトを置く台を作った流れ
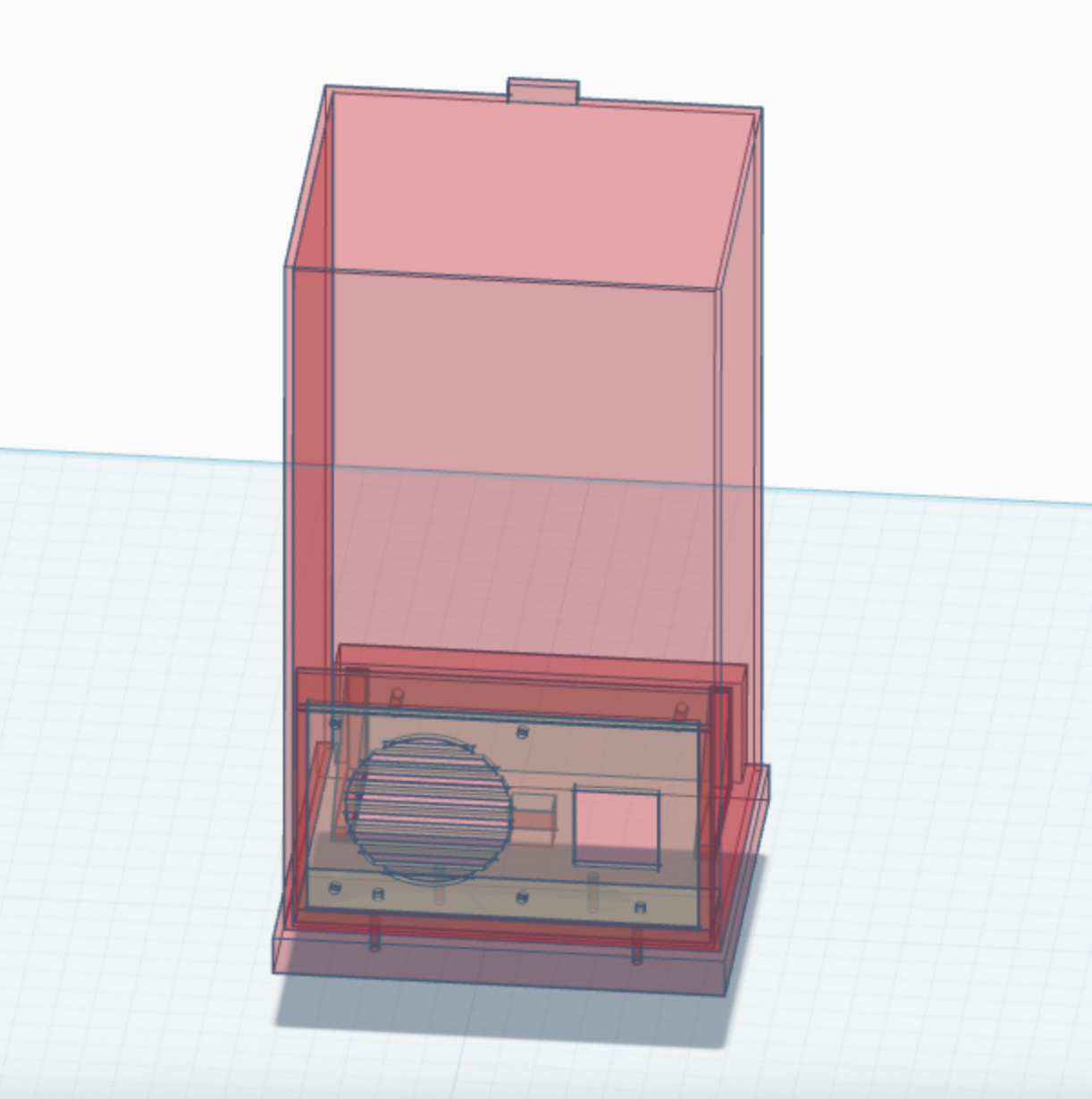
ハトを設置する台は、台座としての機能と、micro:bitやセンサーを収納する箱の機能を兼ね備えるように設計した。また、雨水の侵入による機械内部の故障を防ぐため、防水性を考慮した構造とした。
さらに、センサーを設置部分は網目状の構造とし、対象を正確に感知できるように工夫した。
さらに、センサーを設置部分は網目状の構造とし、対象を正確に感知できるように工夫した。
首の動きのパターンについて
本プロトタイプでは、鳩の首の動きを以下の3パターンに分類して設計した。
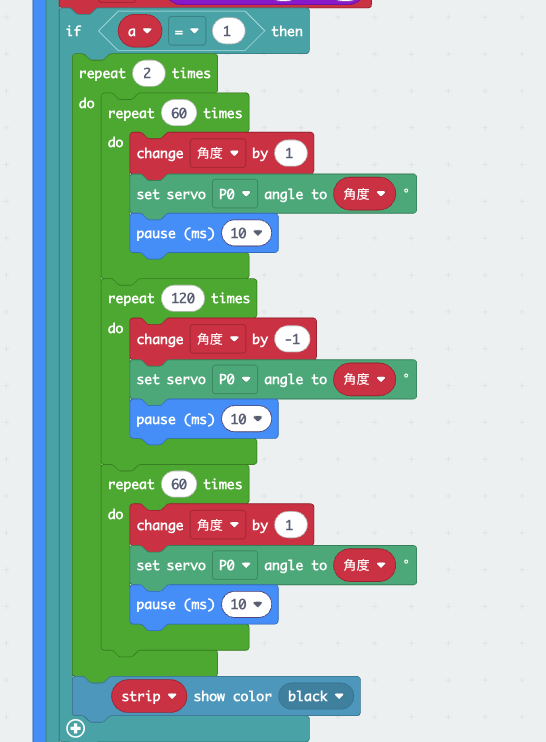
パターン1:なめらかに首を振る動き サーボモーターの角度を中心位置から左右にそれぞれ60°ずつ動かす。
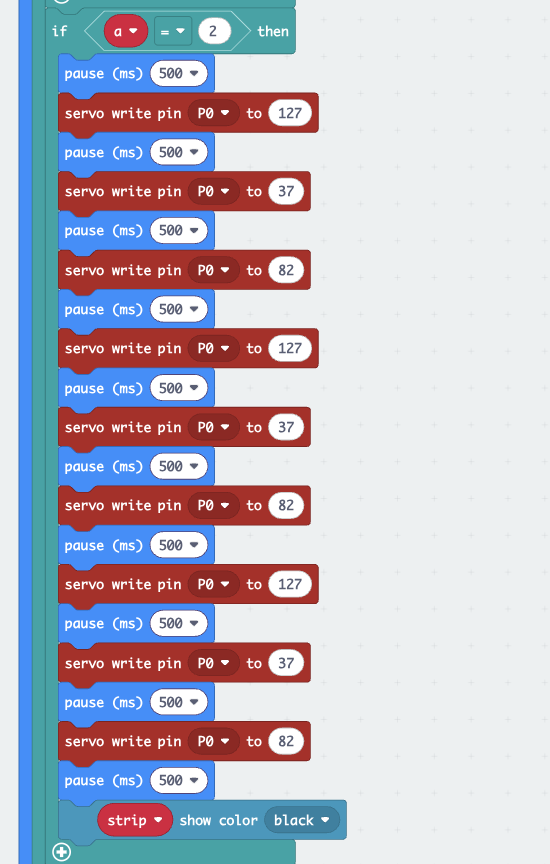
パターン2:決まった角度で首を動かす サーボモーターを 37° → 82° → 127° の順に動作させることで、段階的に左右に振る動きを再現した。 ※82°は理論上の中心である90°ではなく、実機で調整した結果、最も自然に中央に戻る角度として設定した。
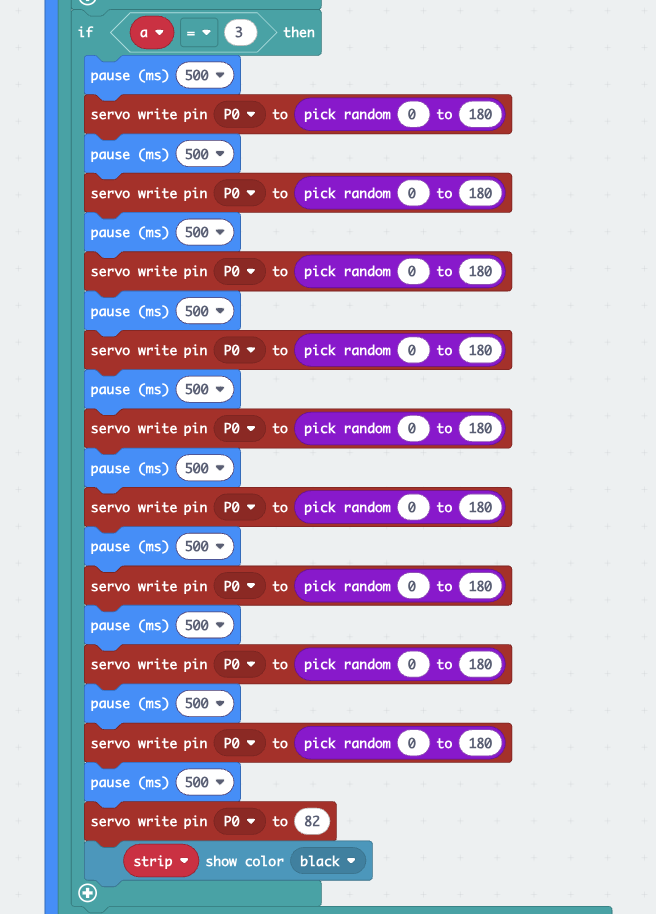
パターン3:ランダムに首を動かす サーボモーターの角度を 0°〜180°の範囲で乱数により決定し、不規則な首の動きを再現した。
パターン1:なめらかに首を振る動き サーボモーターの角度を中心位置から左右にそれぞれ60°ずつ動かす。
パターン2:決まった角度で首を動かす サーボモーターを 37° → 82° → 127° の順に動作させることで、段階的に左右に振る動きを再現した。 ※82°は理論上の中心である90°ではなく、実機で調整した結果、最も自然に中央に戻る角度として設定した。
パターン3:ランダムに首を動かす サーボモーターの角度を 0°〜180°の範囲で乱数により決定し、不規則な首の動きを再現した。
防水対策について
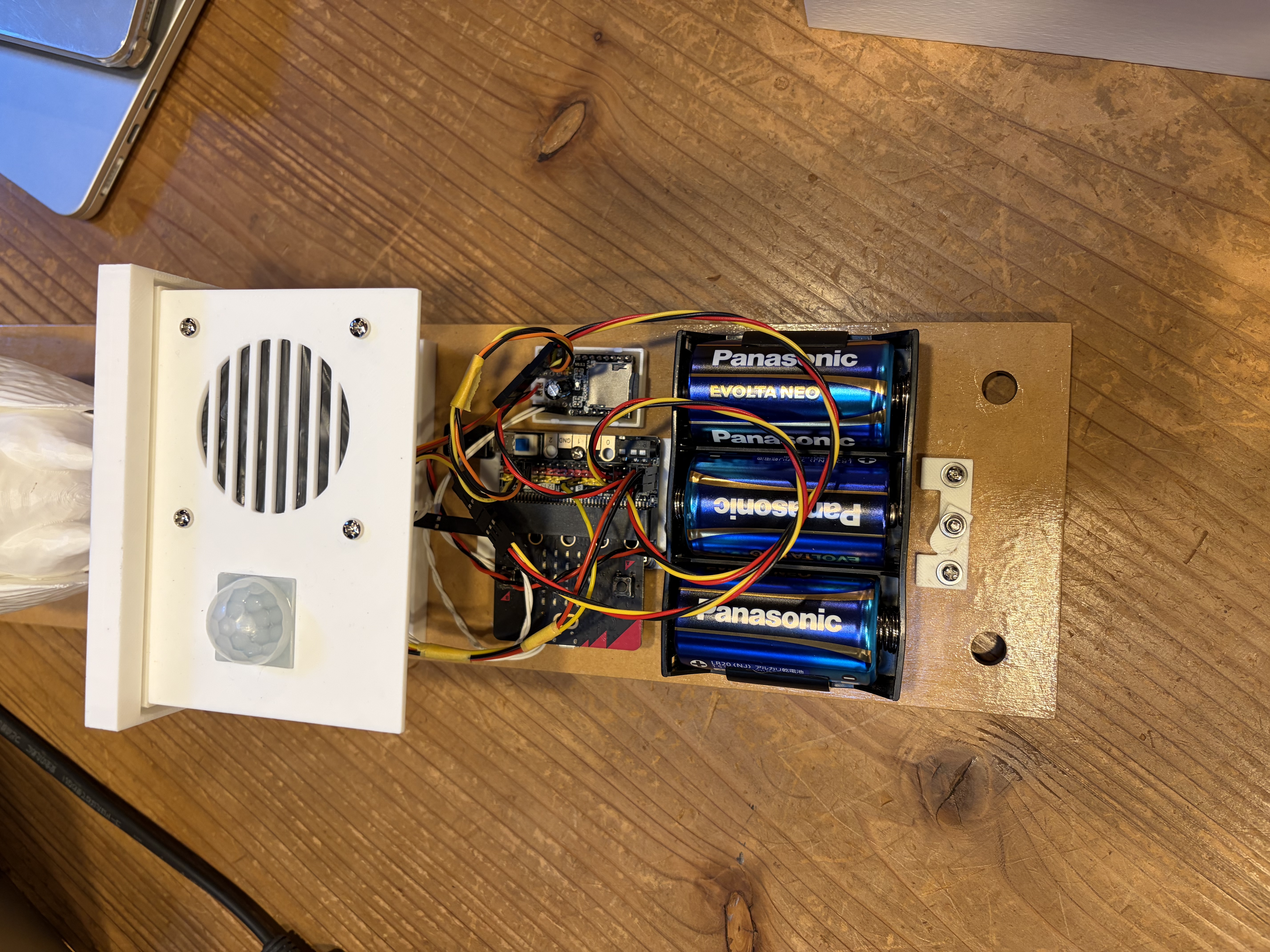
みるぽっぽは屋外に常設することを想定している為、雨水に夜機械の故障を防ぐ必要がある。そこで、スピーカーのところにはビニールを取り付け、露出していたmicro bitや電池などは3Dプリンターで出力したカバーで覆い、防水性を高めた設計とした。
みるぽっぽにしかできないこと
みるぽっぽは、人の意識をひきつけることで、自然にポイ捨てを抑制するという新しい形で文化財保全に貢献がすることができる。従来このような問題への対策として導入されている監視カメラは「監視する側」と「監視される側」という関係性であり、監視される側には面白さがない。一方で、みるぽっぽは人の動きに反応して発光や首振り動作を行うため、通行すること自体に面白さを生み出し、ポイ捨ての抑制を促す点に特徴がある。
実証実験

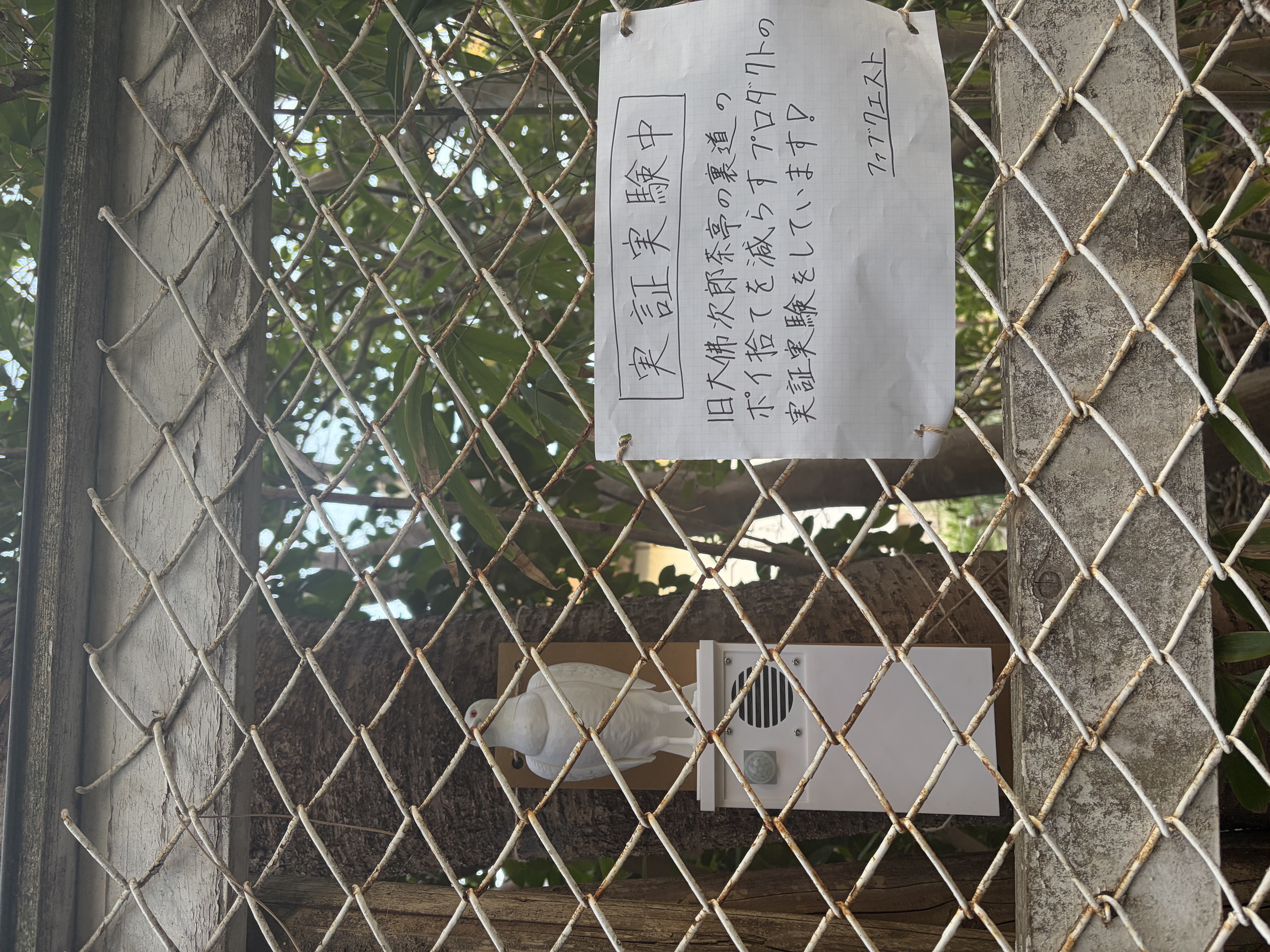
2ndプロトタイプ完成後、旧大佛次郎亭の裏道に設置し、実証実験を行った。また、通行人の反応を把握するため、約2時間にわたり対人調査を実施した。
対人調査
主に、裏道を通行し、本プロダクトに気づいた人にインタビューを行った。その結果、多くの人が「動き」よりも「音」によって存在に気づいたと回答した。鳩の動きに対して怖いと感じる意見も見られた。一方で、この裏道は隣接する空き家の影響もあり、落ち葉が多く、もともと清潔な状態とは言えない。そのため、「道が汚いとポイ捨てをしてしまうのではないか」という意見もでた。さらに、本プロダクトについて「自然環境の中に鳩がいることで心地よさを感じる」という肯定的な評価も見られた。加えてこの道は夜間に暗くなり、過去に盗難事件も発生していることから、防犯面での効果も期待できる可能性が示唆された。
対人調査を経て
対人調査の結果、以下の2点の課題が明らかになった。
①鳩の鳴き声だけではポイ捨て防止への効果が不十分であること。
②看板がないため、プロダクトの目的が伝わりにくいこと。 これらを踏まえ、鳩の鳴き声に加えて「ポイ捨て禁止」を明示する音声を追加することとともに、目的を明確に示す看板を設置することとした。
①鳩の鳴き声だけではポイ捨て防止への効果が不十分であること。
②看板がないため、プロダクトの目的が伝わりにくいこと。 これらを踏まえ、鳩の鳴き声に加えて「ポイ捨て禁止」を明示する音声を追加することとともに、目的を明確に示す看板を設置することとした。
旧大佛次郎亭の反応

旧大佛次郎亭のおかみさんは、本プロジェクトをとても前向きな評価を頂いた。特に、若い人が昔の文化財を守るために主体的な活動をしてる点について、高く評価しているとの意見を得られた。
3rd プロトタイプ
対人調査で明らかになった課題を踏まえ、以下の2点を追加した。
①鳩の鳴き声の「ここはポイ捨て禁止です。」と注意喚起の音声を加えた。
②手書きで看板をデザインし、それをレーザーカッターで出力した。 また、鳩のイラスト内に設置したQRコードを読み取ることで、Fabquestのホームページへアクセスできるようにした。
①鳩の鳴き声の「ここはポイ捨て禁止です。」と注意喚起の音声を加えた。
②手書きで看板をデザインし、それをレーザーカッターで出力した。 また、鳩のイラスト内に設置したQRコードを読み取ることで、Fabquestのホームページへアクセスできるようにした。
2回目の実証実験
音声と看板を追加した状態で、一晩大佛亭の裏道に設置し、再度実証実験を行った。(看板は塗装が間に合わなかったため、紙に記載したものを使用した) 設置前には、タバコの吸い殻が10本、その他のお菓子の袋などのゴミが3点確認された。設置後の結果として、ゴミの総数に大きな変化は見られなかった。一方で、看板の設置により立ち止まって興味を示す人が見られたことから、一定の関心喚起の効果は確認された。
今後の展望
今後は、鎌倉に存在する文化財、特に大佛次郎亭のように行政が直接管理していない場所を保全するため、本プロダクトの量産を検討している。また、大佛次郎さんは猫を好み、500匹ほど飼育していた背景を踏まえ、設置場所に応じて鳩だけでなく猫をモチーフとしたバリエーションの製作も視野に入れている。さらに、他の文化財においても、それぞれの特徴や象徴に応じたデザイン展開を行っていきたい。加えて、対人調査において、「目線が上に行ってしまい、鳩に気づきにくい」という指摘があっため、今後は設置位置の調整を行い、より視認性を高める改善を進めていく予定である。