判定用指輪
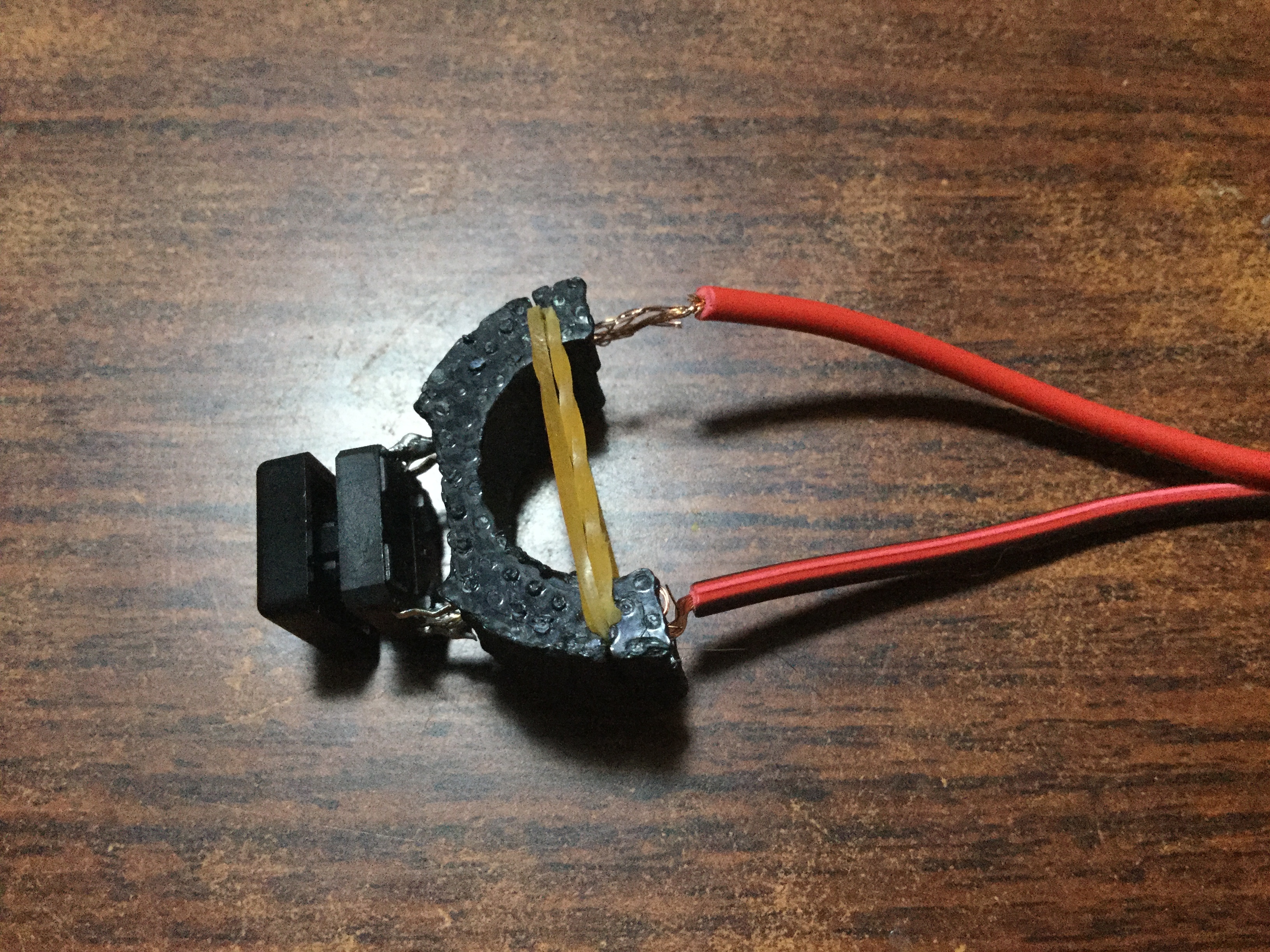
この指相撲で使用する2つの指輪の製作を行う
設計
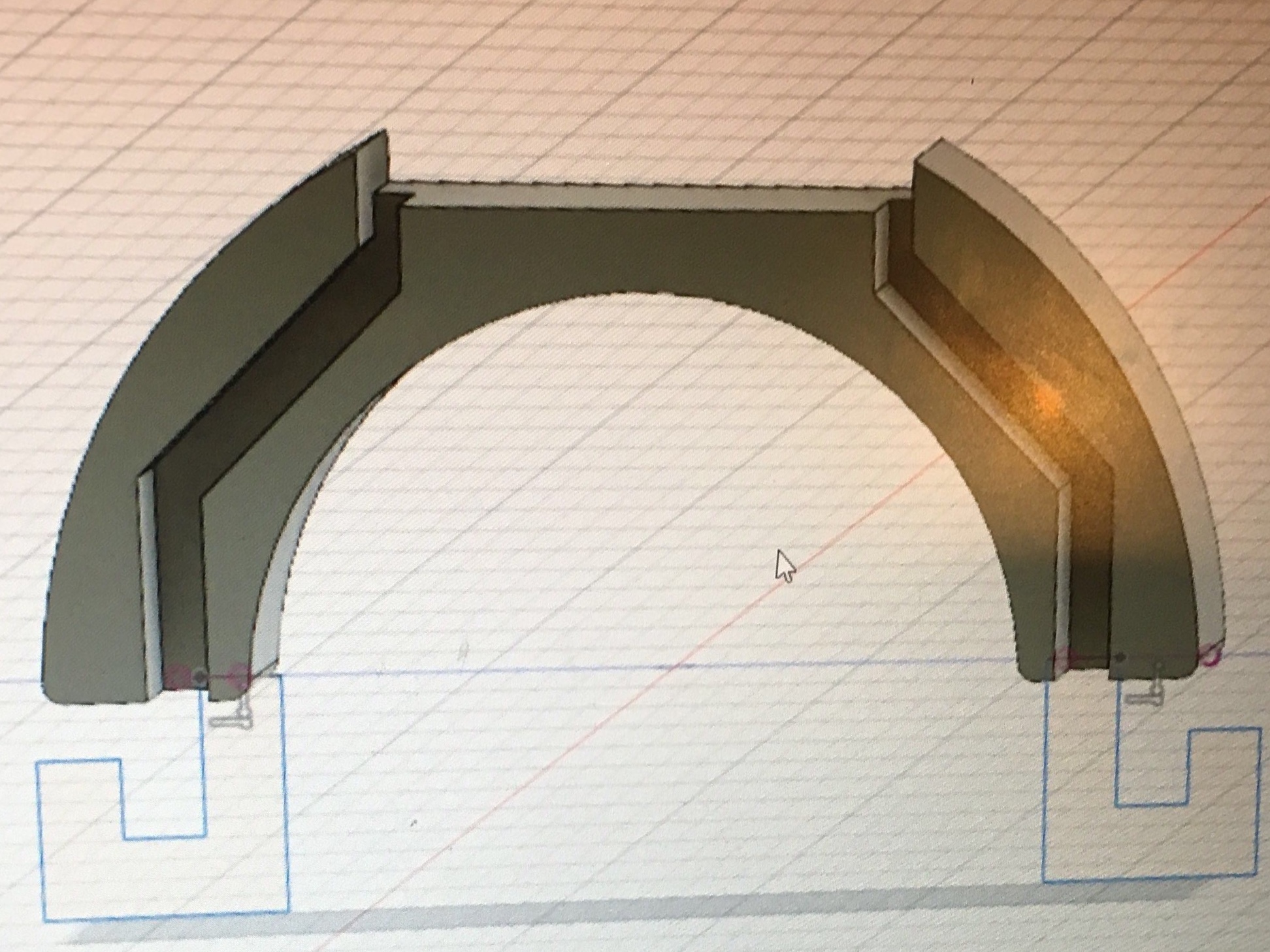
指輪の中に導線を通し、Arduino UNOへつなぐので1つの指輪を半分のパーツx2で作る
半分のパーツは半円型で、
- 上部にスイッチをはめるくぼみ
- スイッチの端子、導線を通し、下側から導線を出すための空洞
- 指に固定するための輪ゴムを引っ掛けるツメ
※写真は下部にJ型と、し型のフックのようなツメだが、側面の下のほうに切れ込みを入れたようなツメが良い
出力
設計したデータを3Dプリンターで4つ作り、指輪2つ分を用意する
中央判定装置
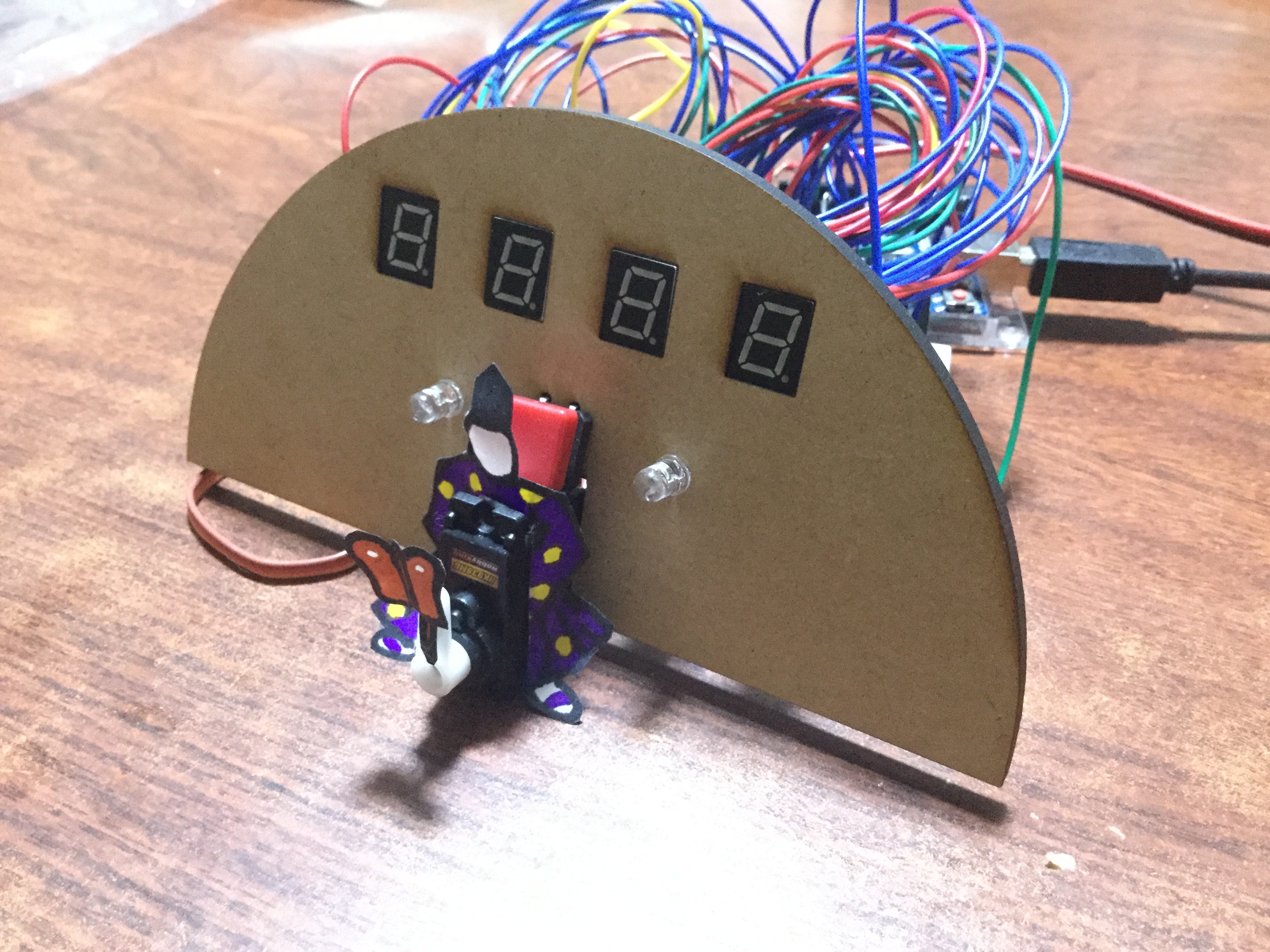
勝敗や時間を表示する台の製作を行う
設計

半円形のMDFに
- 7セグメントLEDx4
- 勝敗表示用LEDの端子2本x2(計4つ)
- サーボ
- リセットスイッチの端子4つ
※写真は設計ミスしており、実際は緑線は残り、赤点に穴がある
出力
MDF(4mm)をレーザーカッターで加工する
組立・配線
プログラミング
- 03.00→02.99という感じで開始前の待機時間をカウントダウンで表示
- 待機時間が00.00になったら、勝敗の決着時間(今回は5秒)から、指輪のスイッチを押した時間を引いてカウントダウンで表示(例 押してなければ05.00, 2.26秒押していれば02.74と表示される)
- 表示時間が00.00になり、勝敗がついたらサーボ(軍配)を勝ったほうに傾け、勝った方のLEDを光らせ、00.00表示のままにする
- リセットボタンが押されたら、サーボの角度をリセット、LEDを消し、1に戻る
※細かいルールや待機時間、勝敗決着時間はお好みで
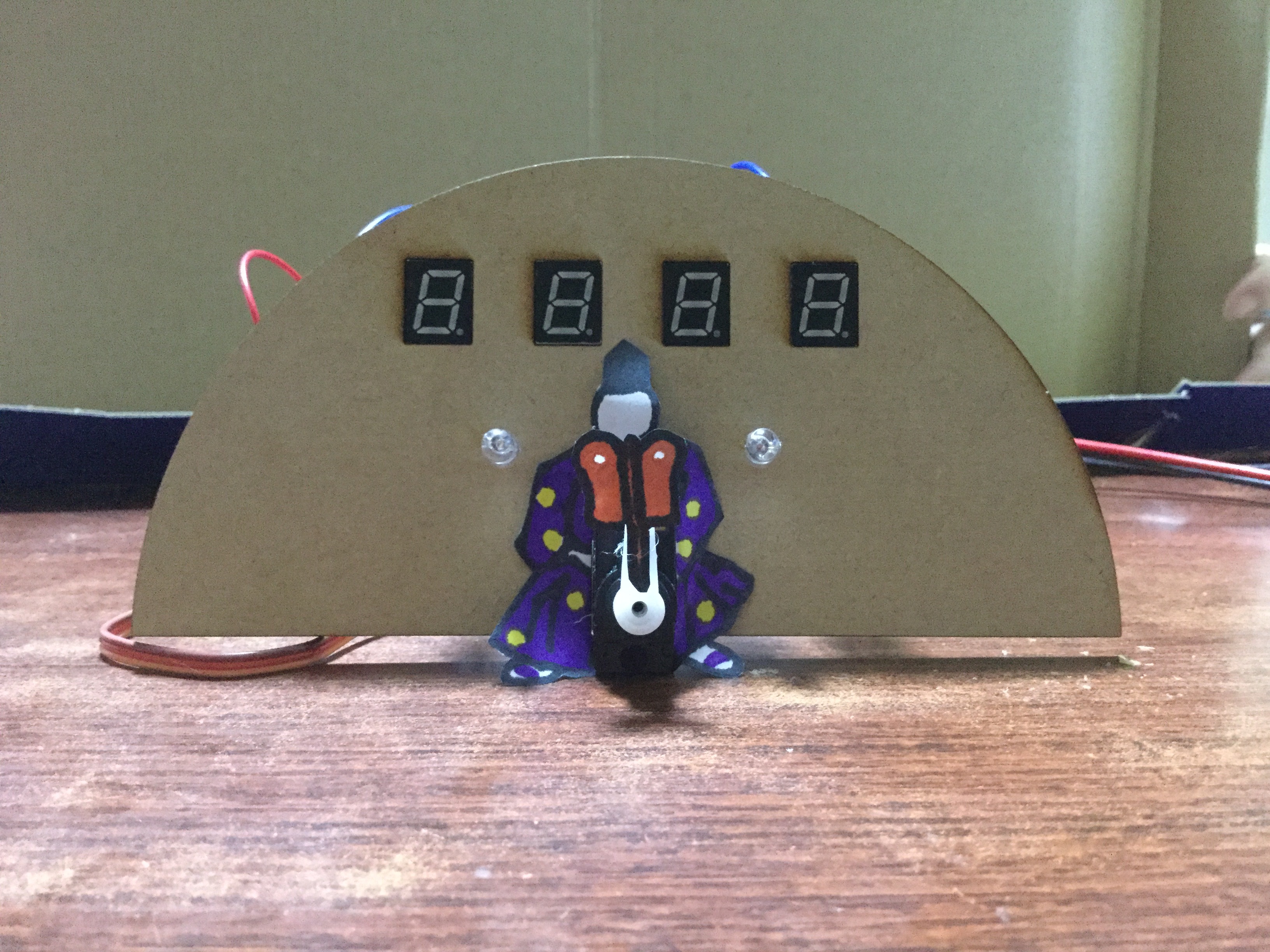
完成
指輪を親指にはめ、電源を繋ぎ、相撲を取りましょう!