「水掻き」身体拡張アタッチメントを製作する。


今回のFabnowでは人間の「水掻き」を拡張する(人の身体にフィットする)アタッチメントを製作することにする。
アイデア出しの段階では
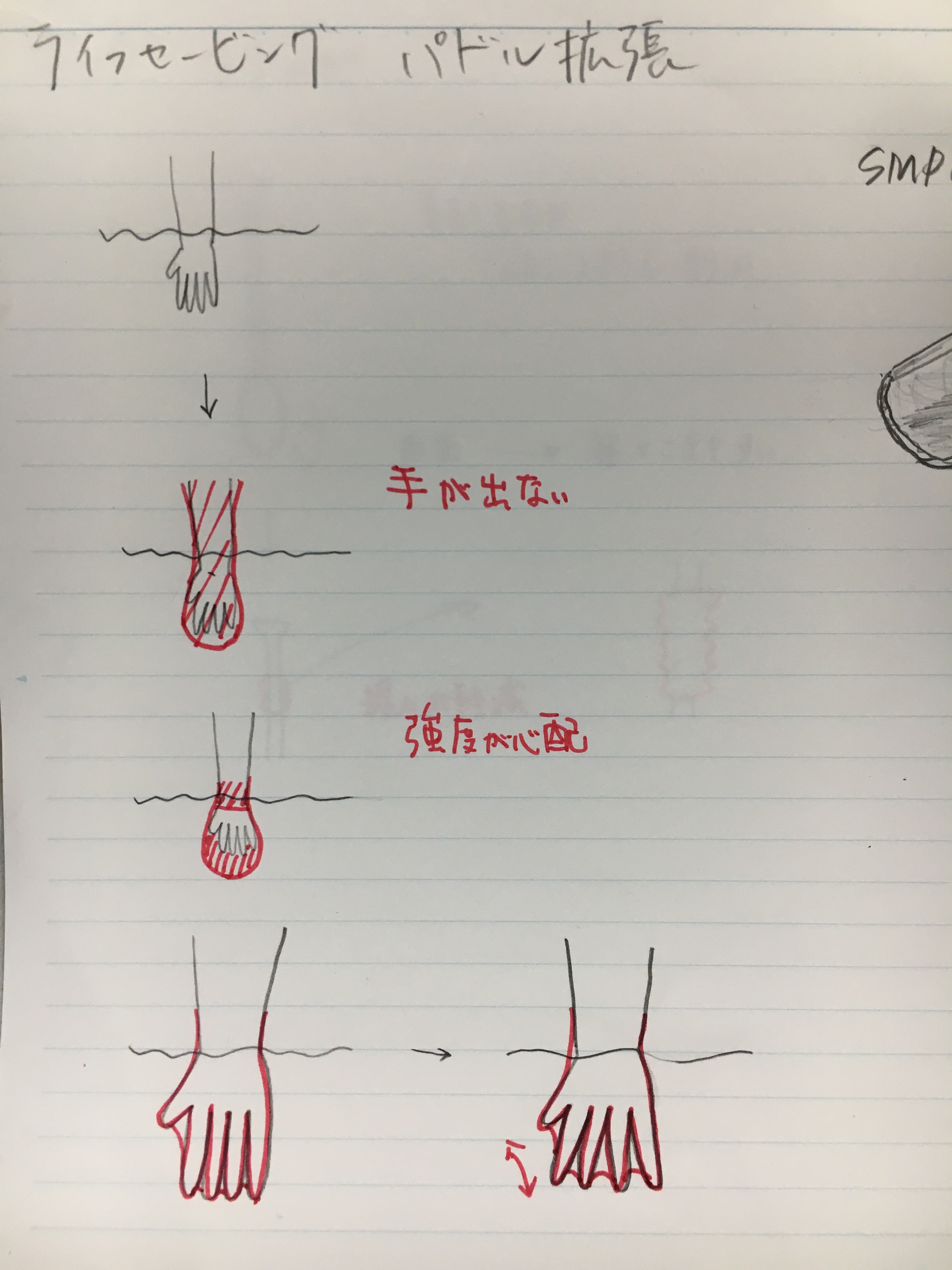
- ライフセービングのパドルボードのパドリング力 / 水中での泳力を拡張するアタッチメント
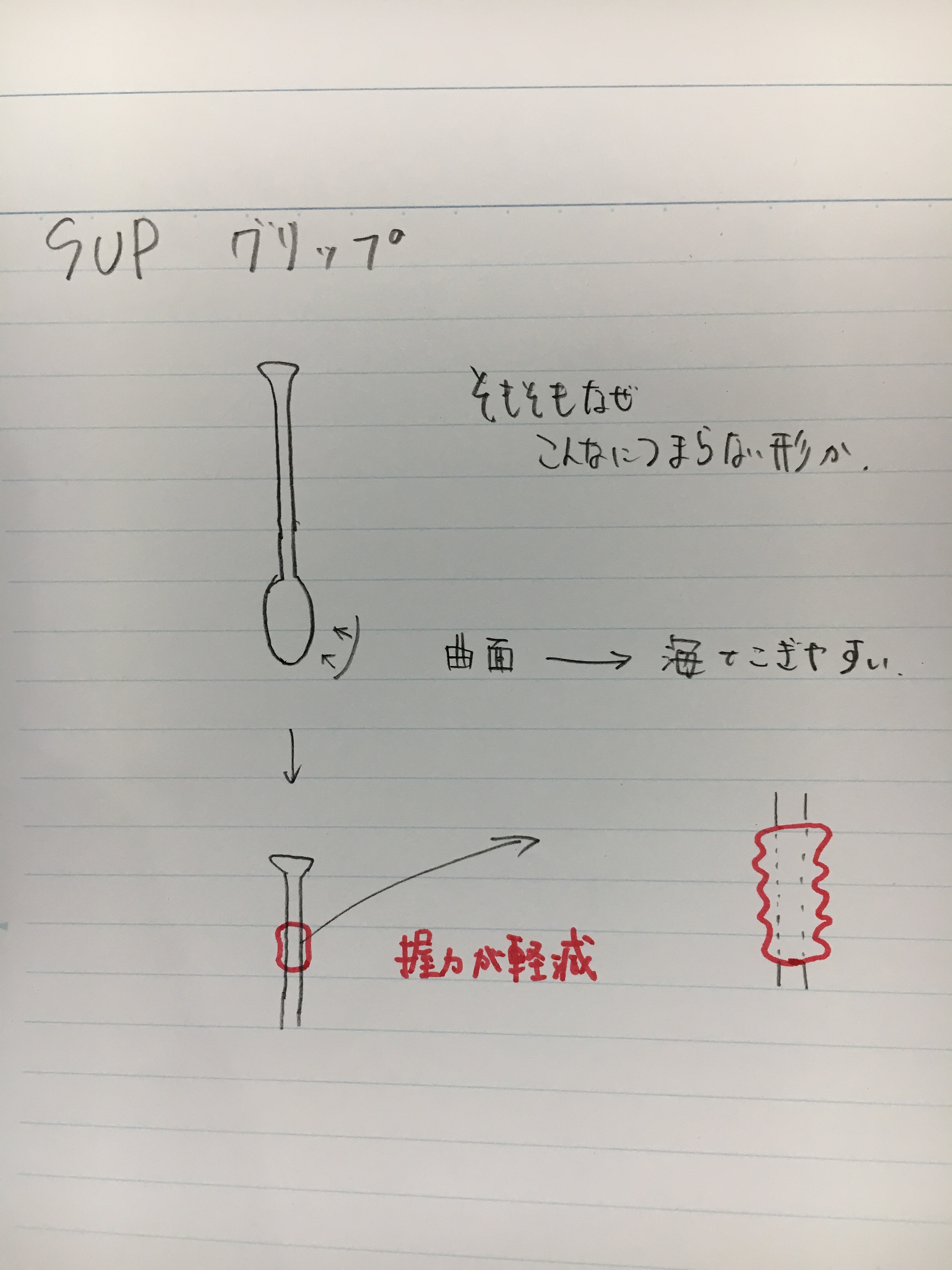
- SUP(スタンドアップパドルボード)のパドルのグリップ力を拡張するアタッチメント
を考えた。
どちらも実用性はあるが、一つ目の方が面白そうなものが作れそうと思い、今回はこちらを製作することにする。
自分の手を3Dスキャンする。

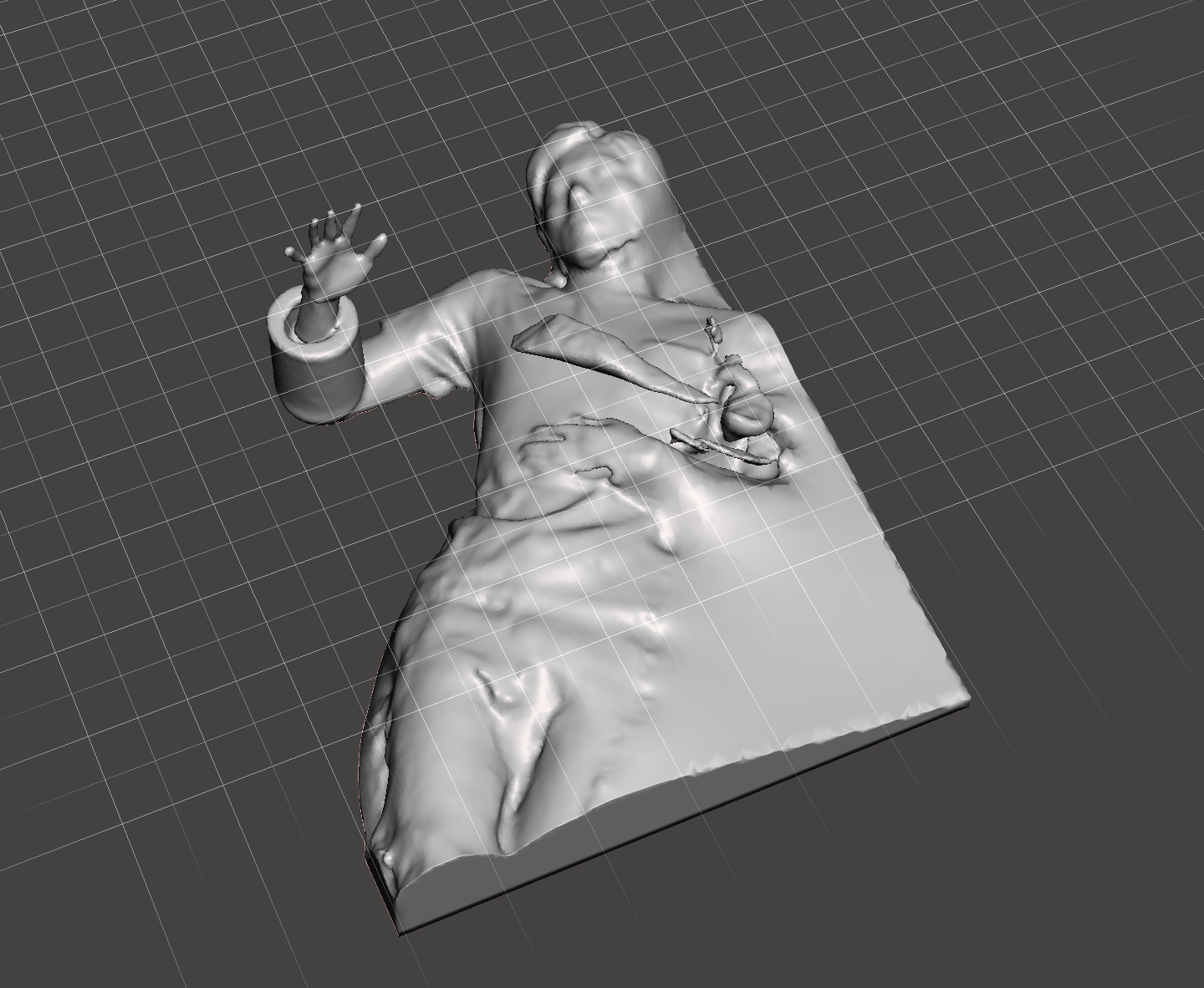
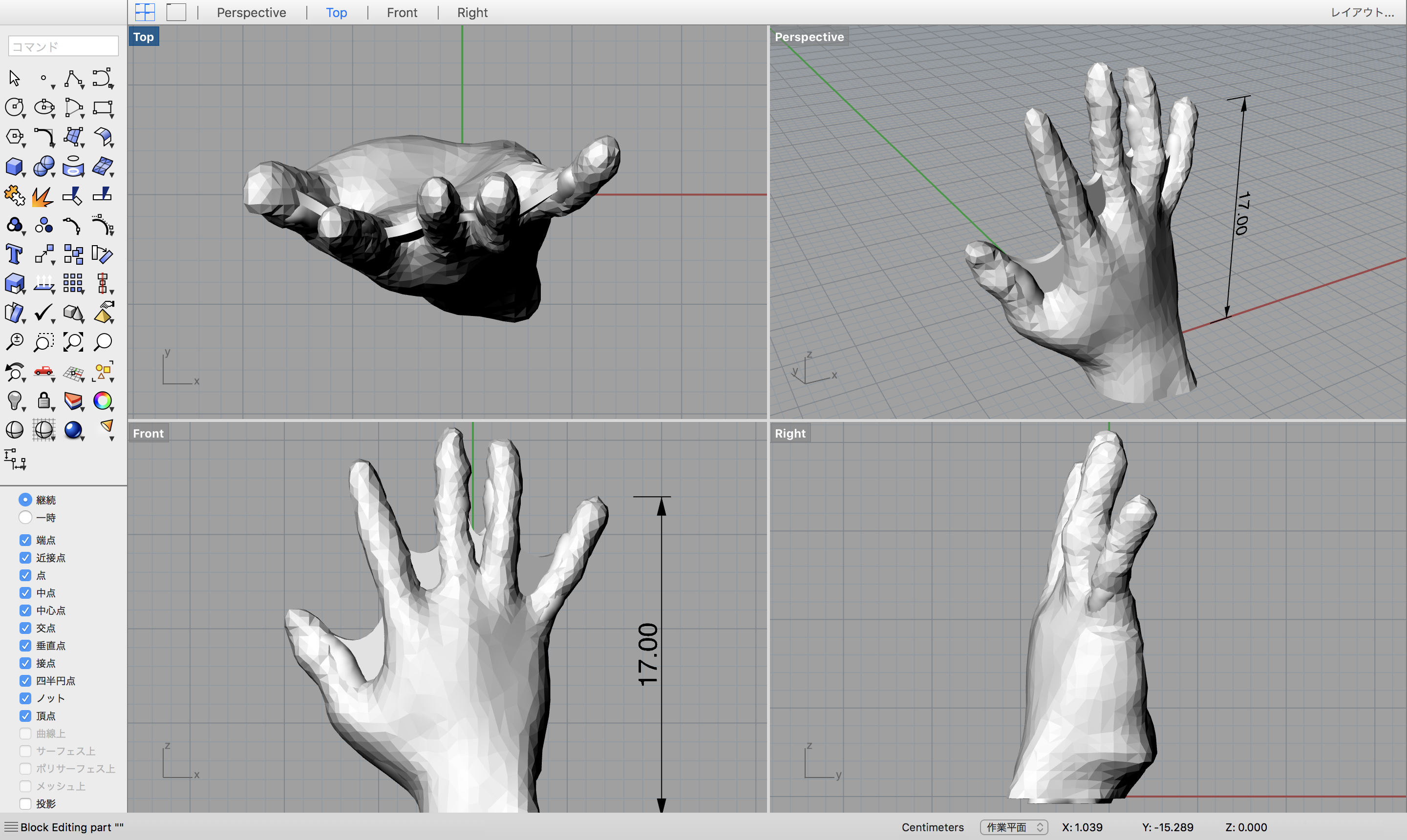
まずは、3Dスキャンした自分の手をもとにして、自分の手にフィットするモデルの製作を試みた。
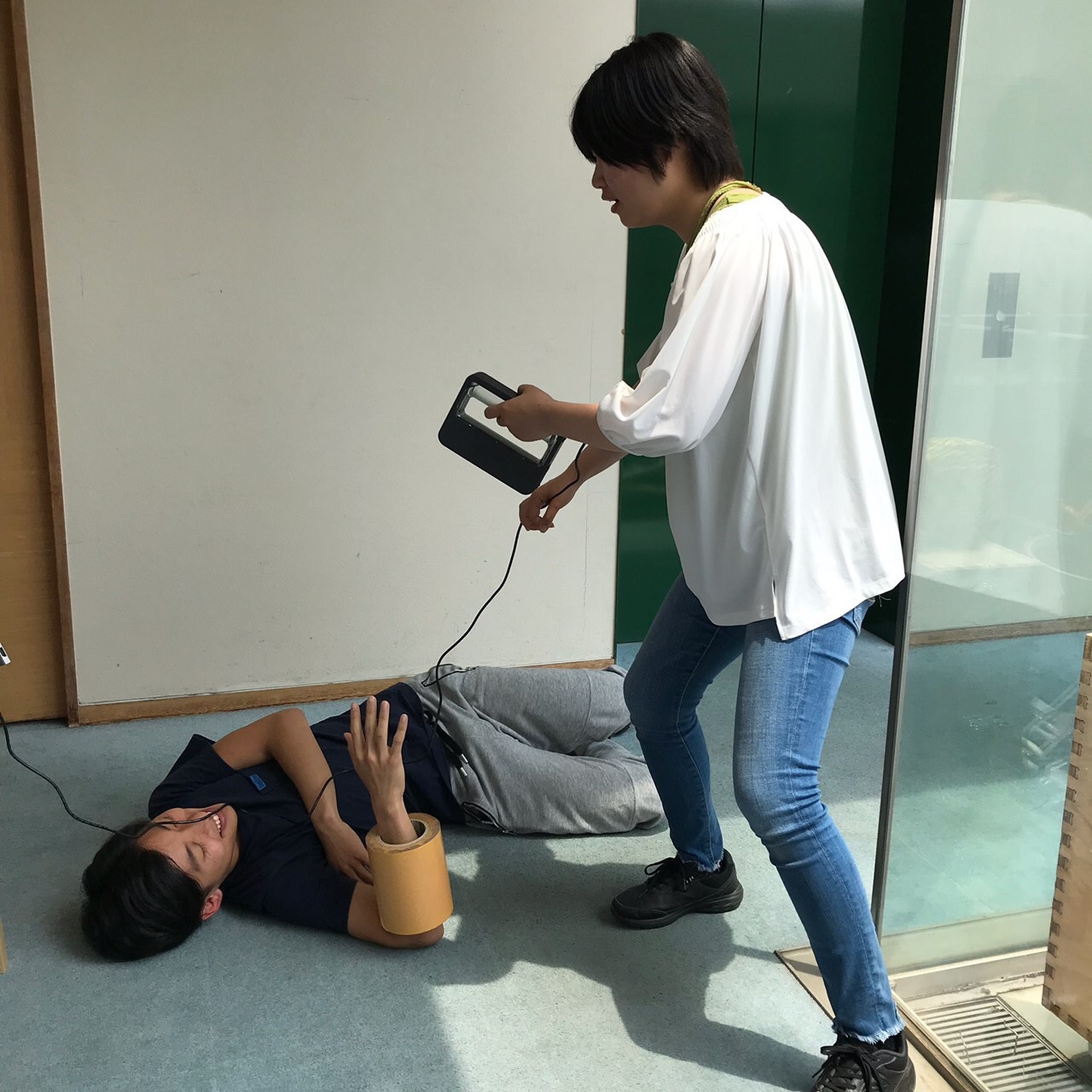
3Dスキャンには、3人(最低でも2人)必要になる。
手をスキャンするときには、どうしても指が動いてしまうため、ぐちゃぐちゃなデータになってしまう。
そのため、なるべく手を動かさない工夫として、上記の写真(5枚目)のように試みた。
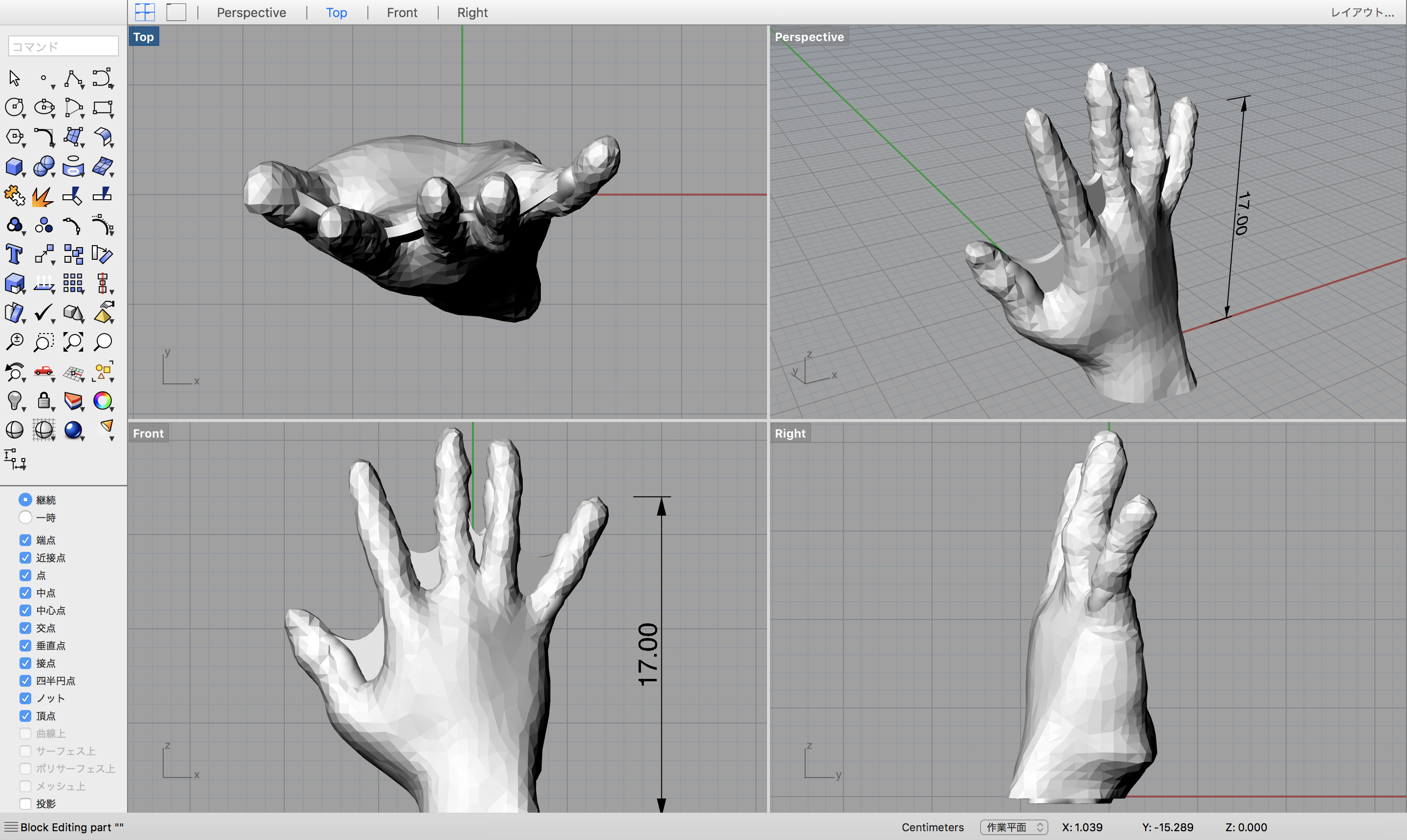
自分の手の3Dデータを元にモデリングをしてみる。
製作の手順
- 自分の手の3Dデータを読み込む。
- 水掻きを指の間につける。
- スケールして大きくする
- 元の大きさの自分の手を複製し、3までに出来たものからブール演算(引き算)をする。
↑このやり方では、モデルが相当大きくなってしまう&ブール演算がうまく行かなかったため、断念。
追記:スケールではなく、オフセットを使えばうまくいく。
アナログに自分の手をスキャンしてみる。
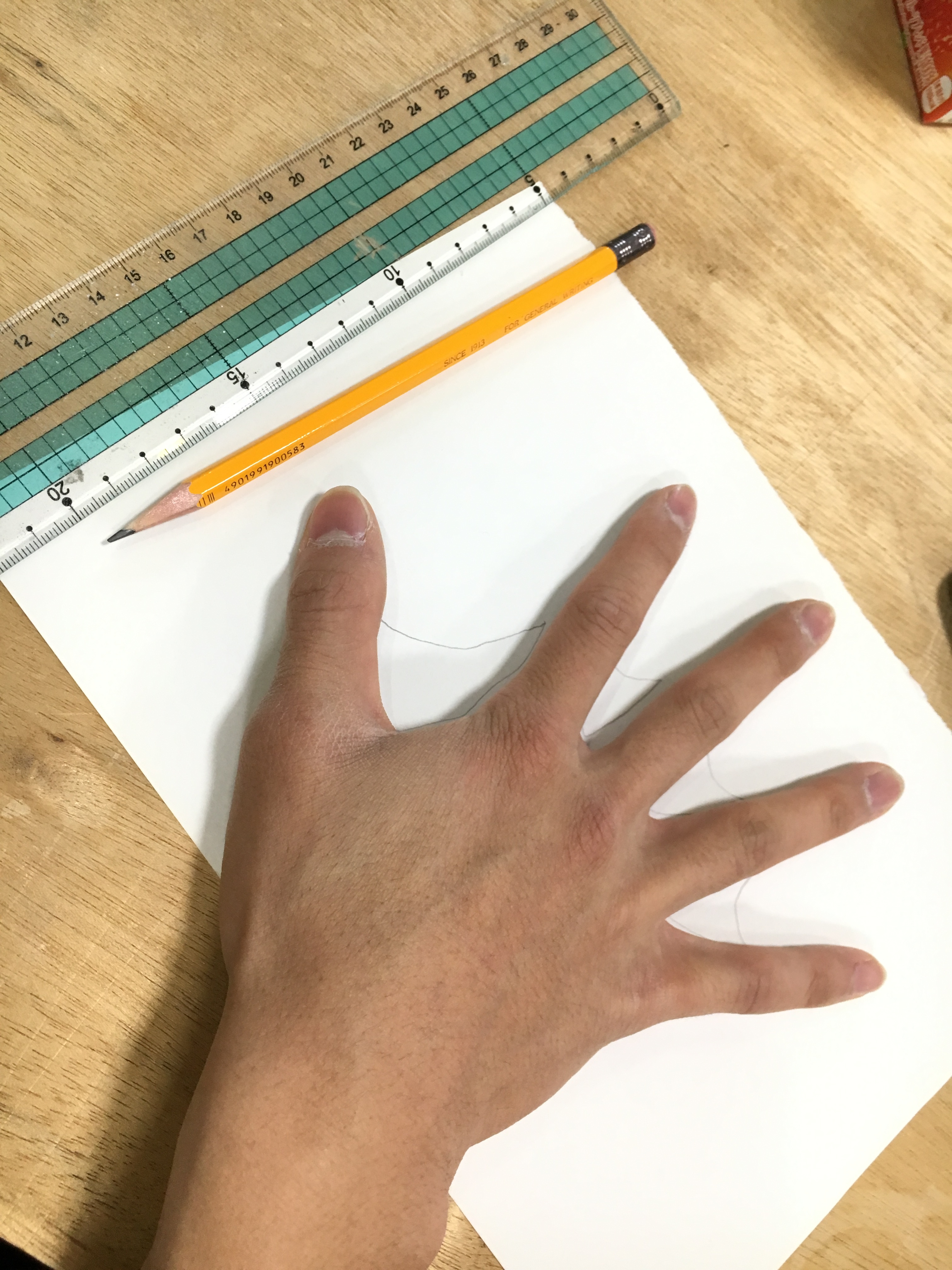

3Dスキャンしたデータによるモデリングが想像以上に難しかった為、アナログにスキャンすることを試みる。
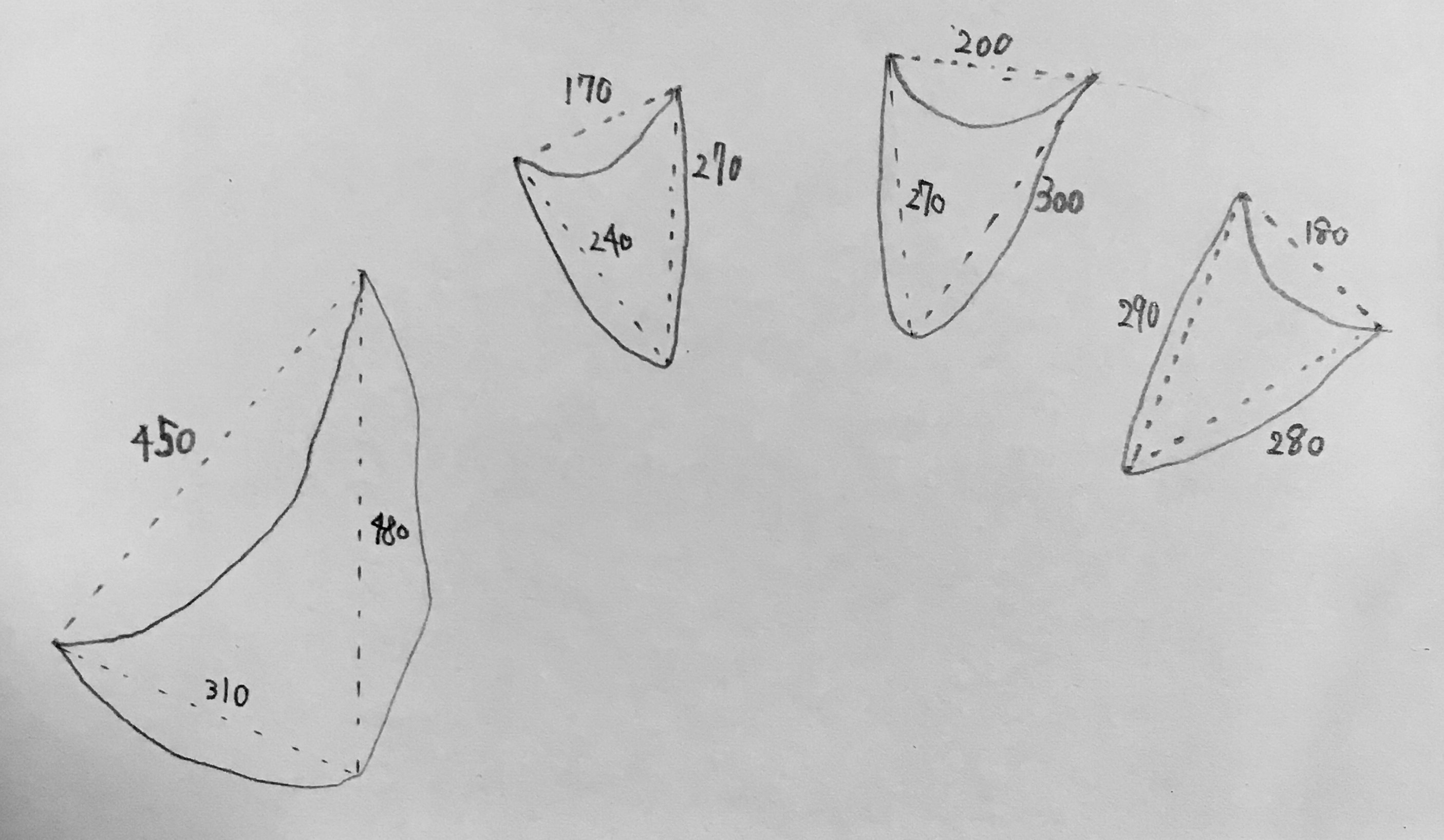
- 紙のうえで指の間を鉛筆でなぞる。
- 実寸サイズを記入する。
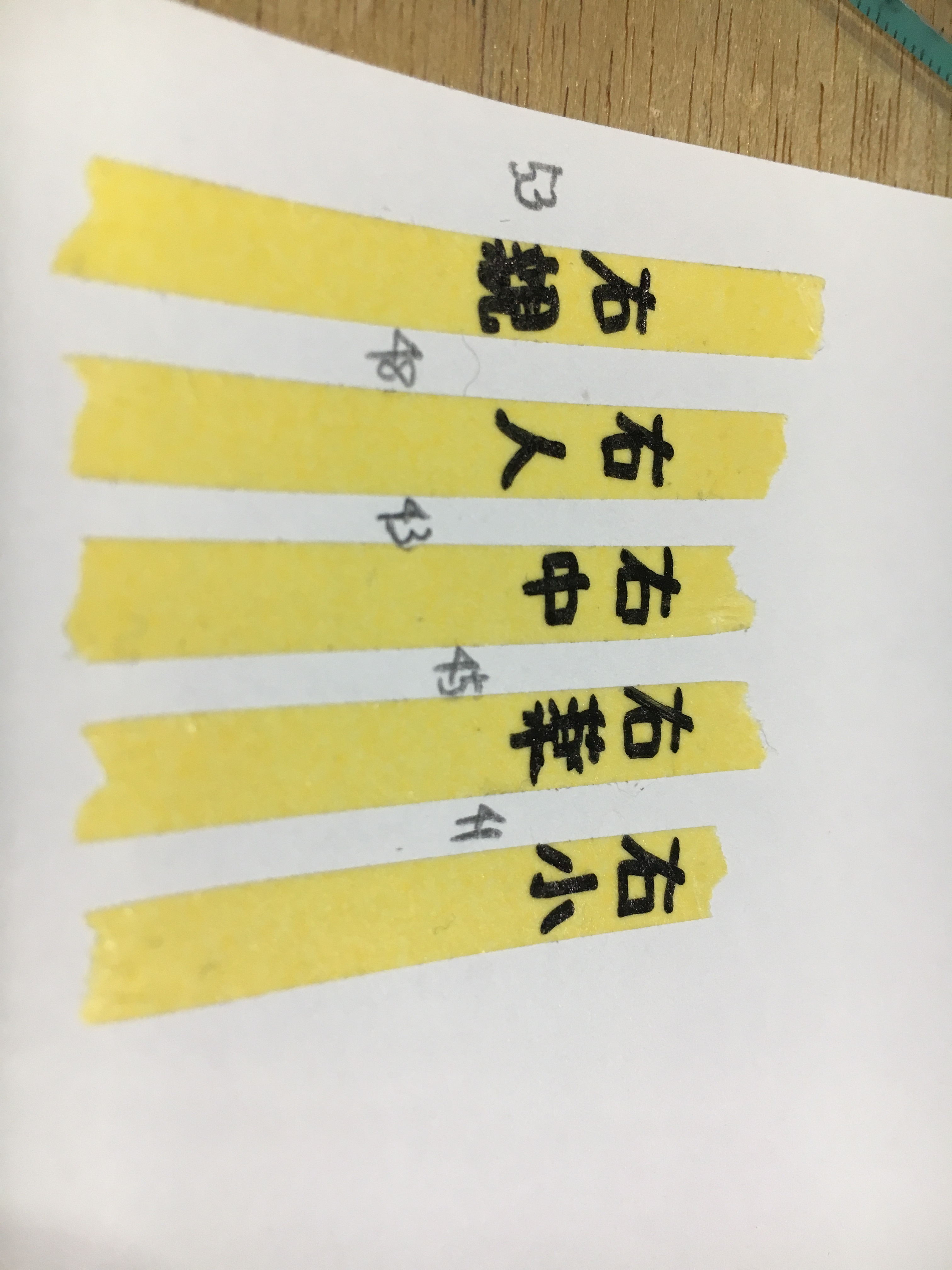
- 指の太さをみる為、マスキングテープを巻きつける
- 長さを記入する。
スキャンデータを元にモデリングをする。
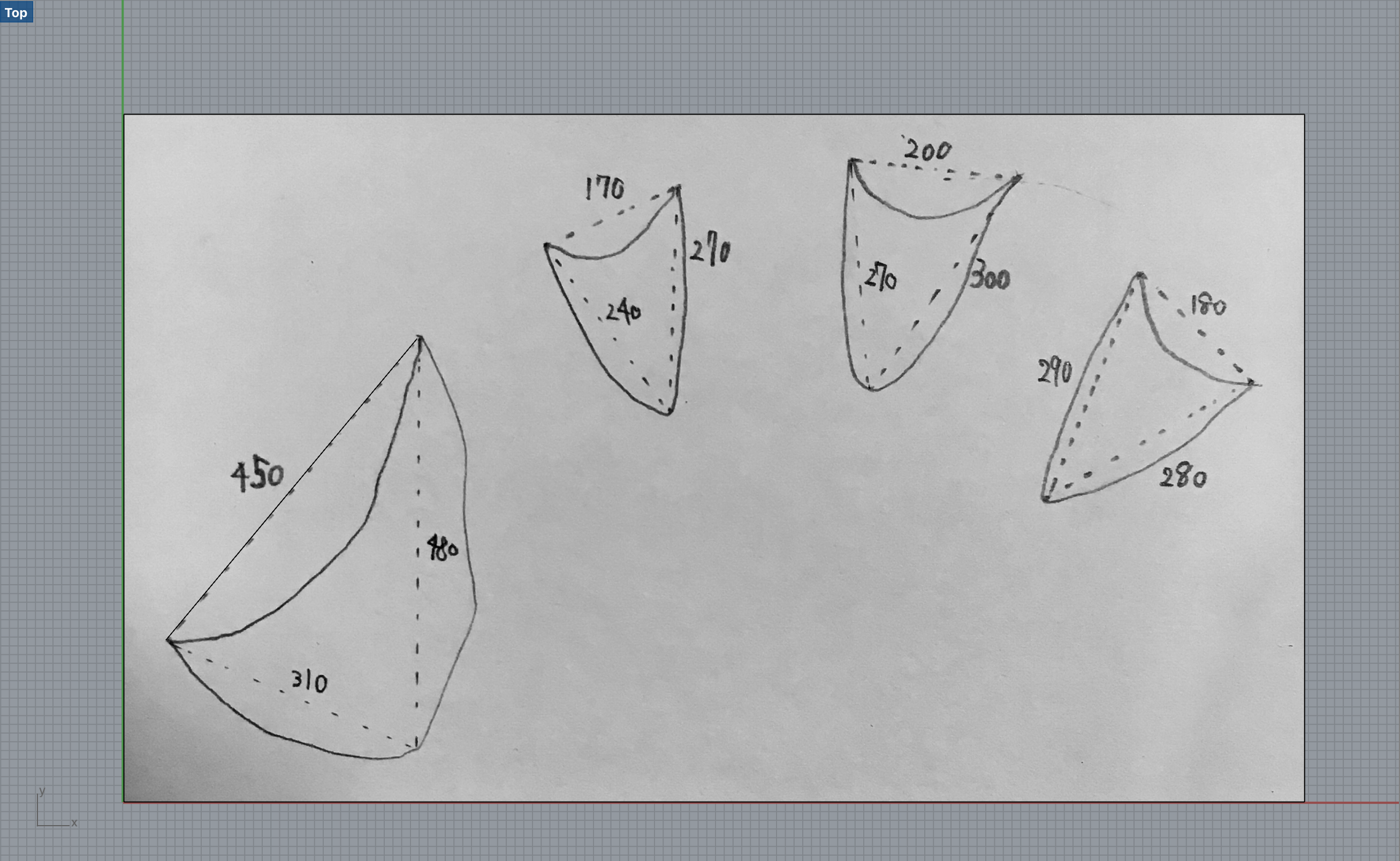
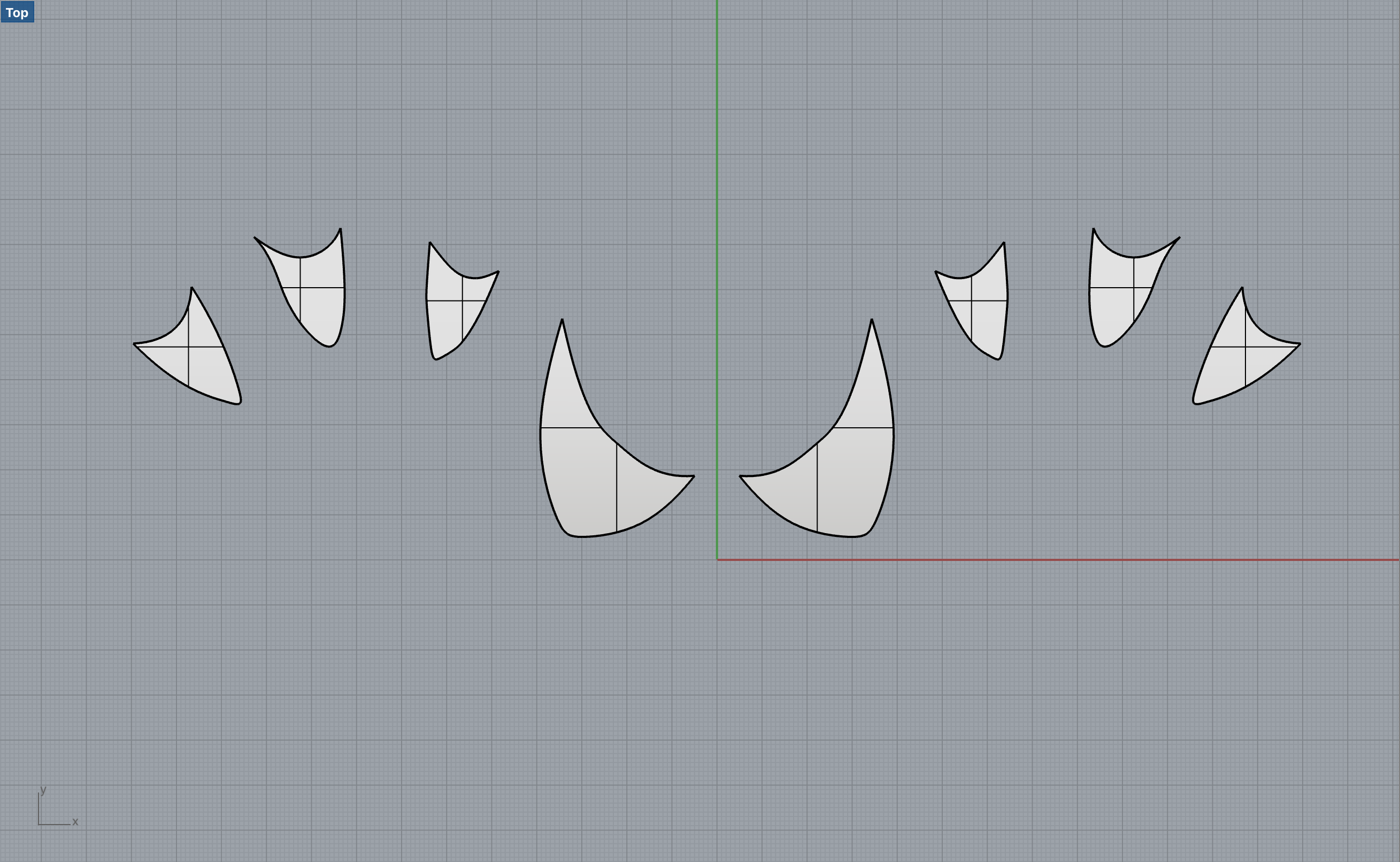
- 計測した紙の写真をrhinocerosに取り込む。
- 計測した数字と合わさるように写真の大きさを調整する。
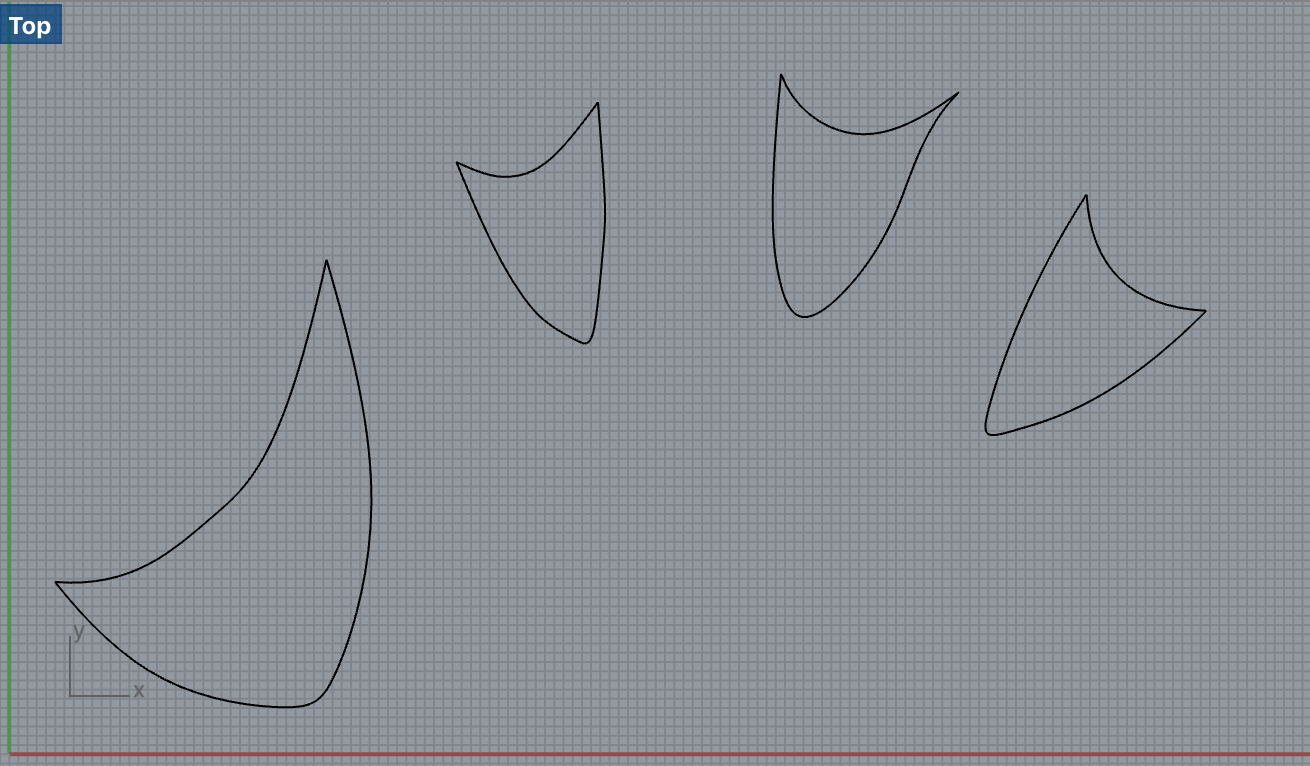
- 写真に合わせてトレースする。
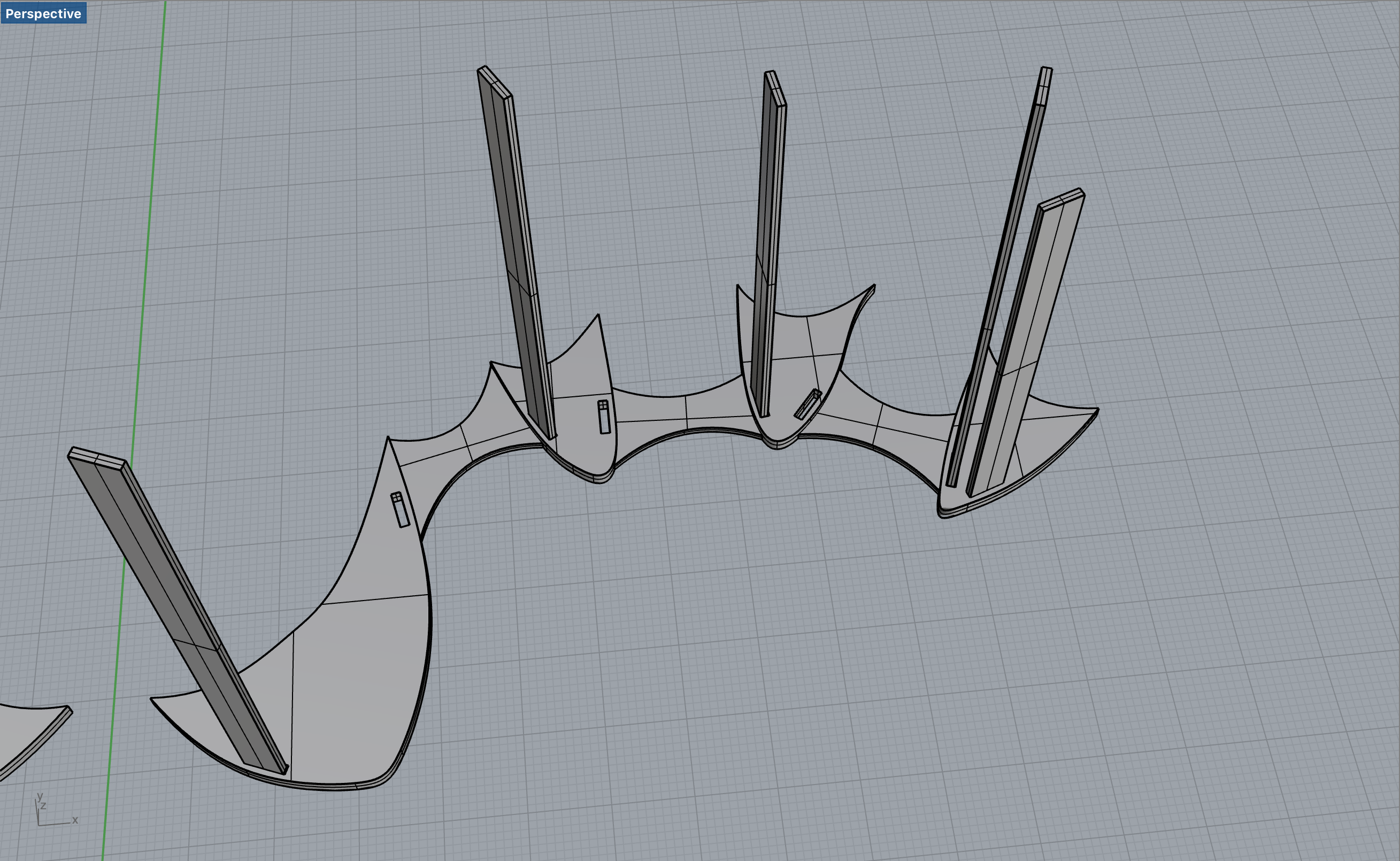
- 指にフィットさせるためのアタッチメント部分をつくる。
1回目の出力(SMP55)。

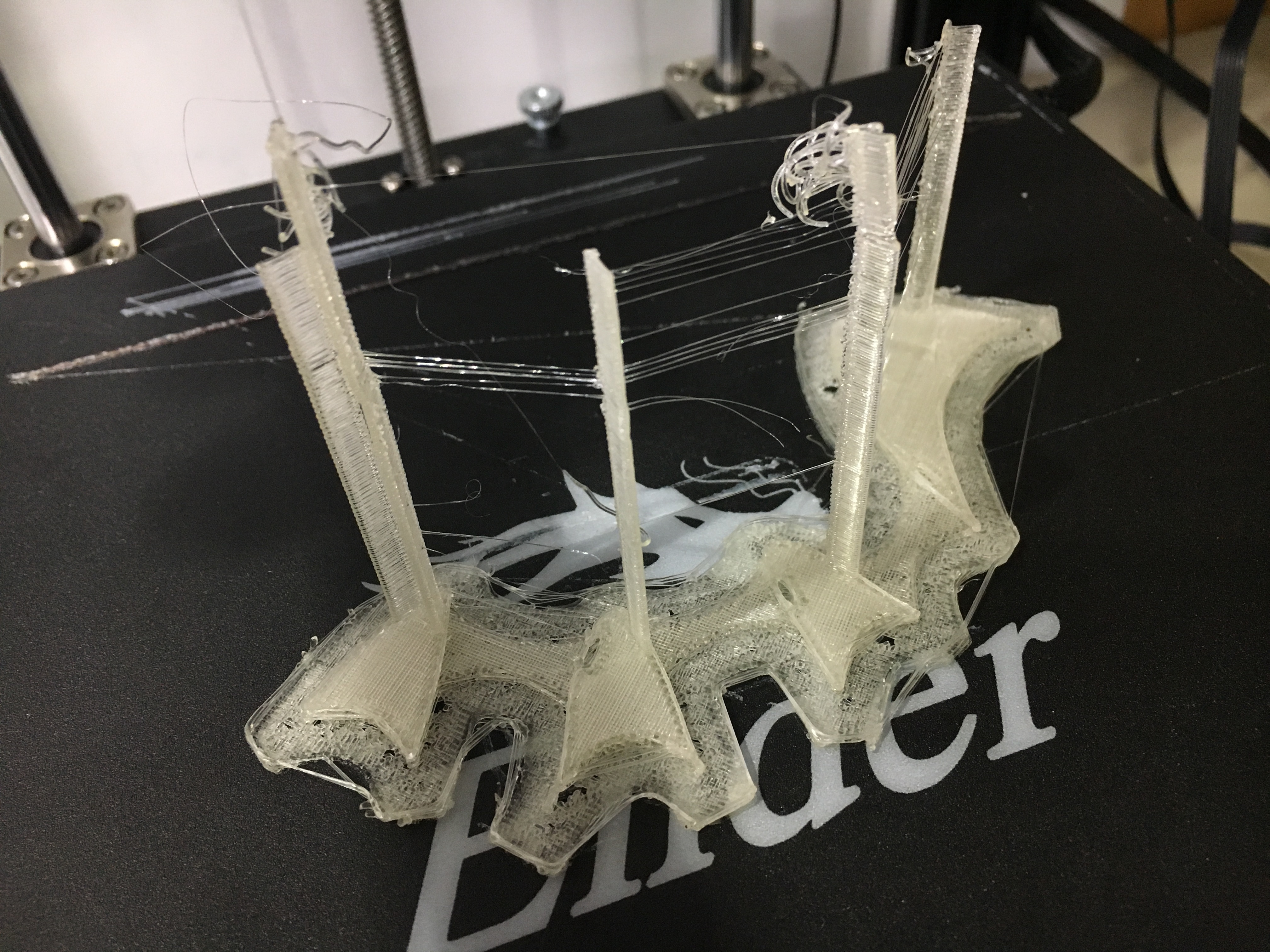
- ラフト部分にノズルがぶつかってしまう。
- 高さが出てくるとともに斜めになってしまう。
以上の理由により、1回目の出力は失敗。
2回目の出力(SMP55)。




前回からの改善点は、
- 取り付けのベルト部分を太くする。
- 水掻きの高さを大きくする。
以上の改善をすることによって、綺麗に出力できた。ところが、2枚目の写真のようにベルトを通す部分が塞がってしまった。
超音波カッターがなかった為、ベルトを通す部分の穴を開けることはできなかった。
SMPの性質を活かして自分の手にフィットさせる。
SMPは55℃で柔らかくなる為、その性質を活かして自分の手に巻きつけた。
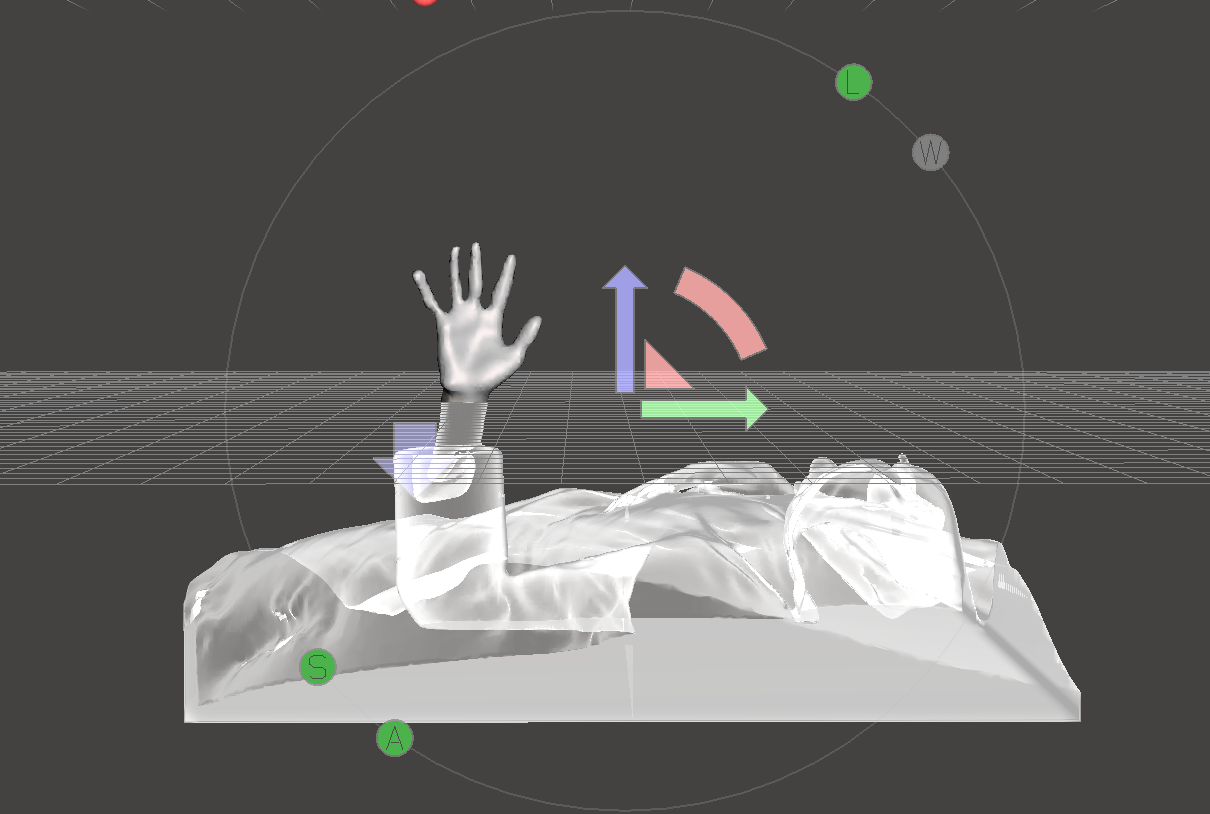
(上半身の3Dスキャンもしました。)
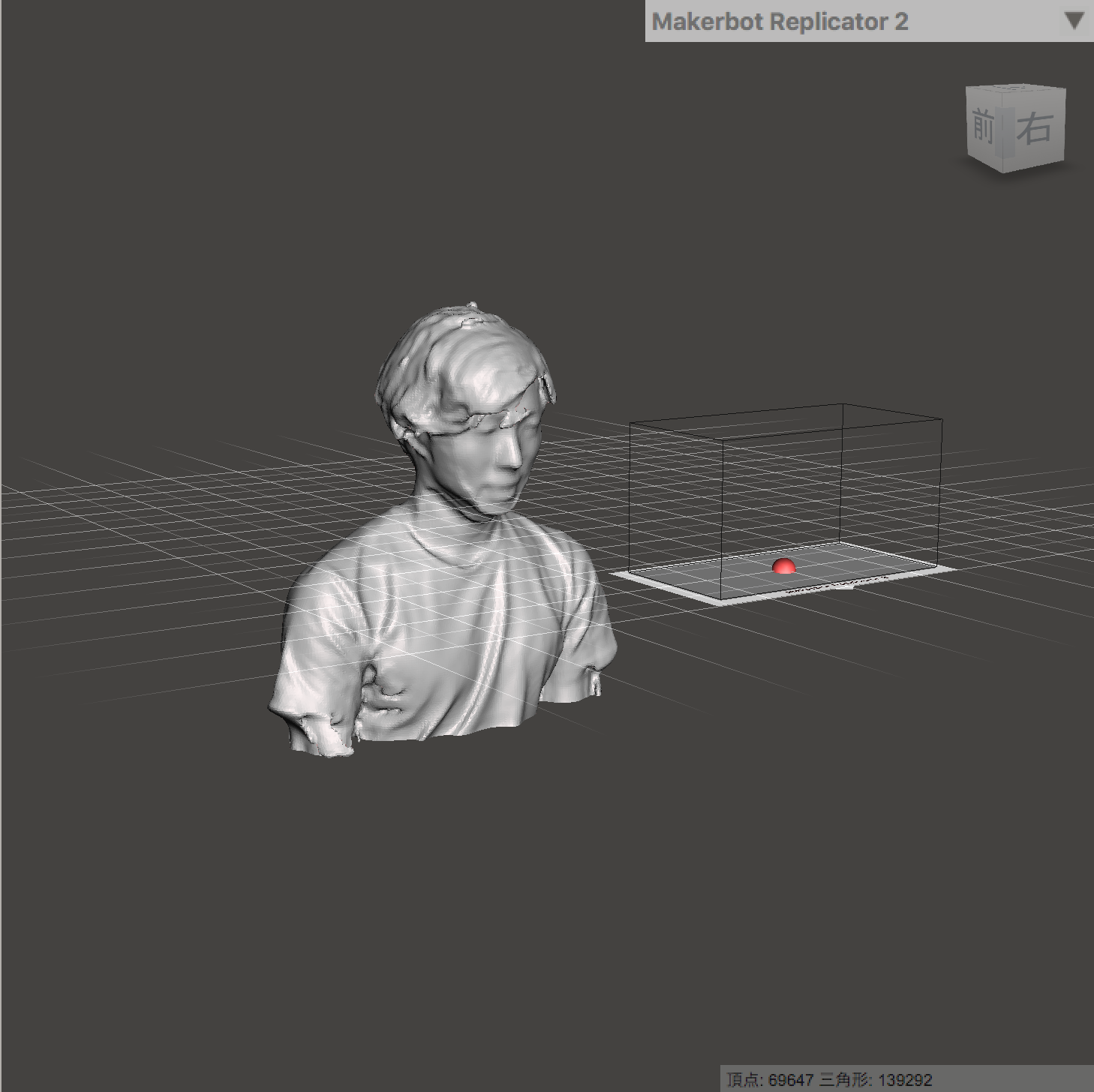
スキャンには Sense 1st Gen を使用。
改善し得る点
- 水を掴みやすい形にする。
- 手につけるため、丸みのある形状にしてなじませる。