メイン基板の準備
CY8CKIT-145を入手し、必要な箇所以外の切除、部品の取り付けを行いメイン基板を作成する。
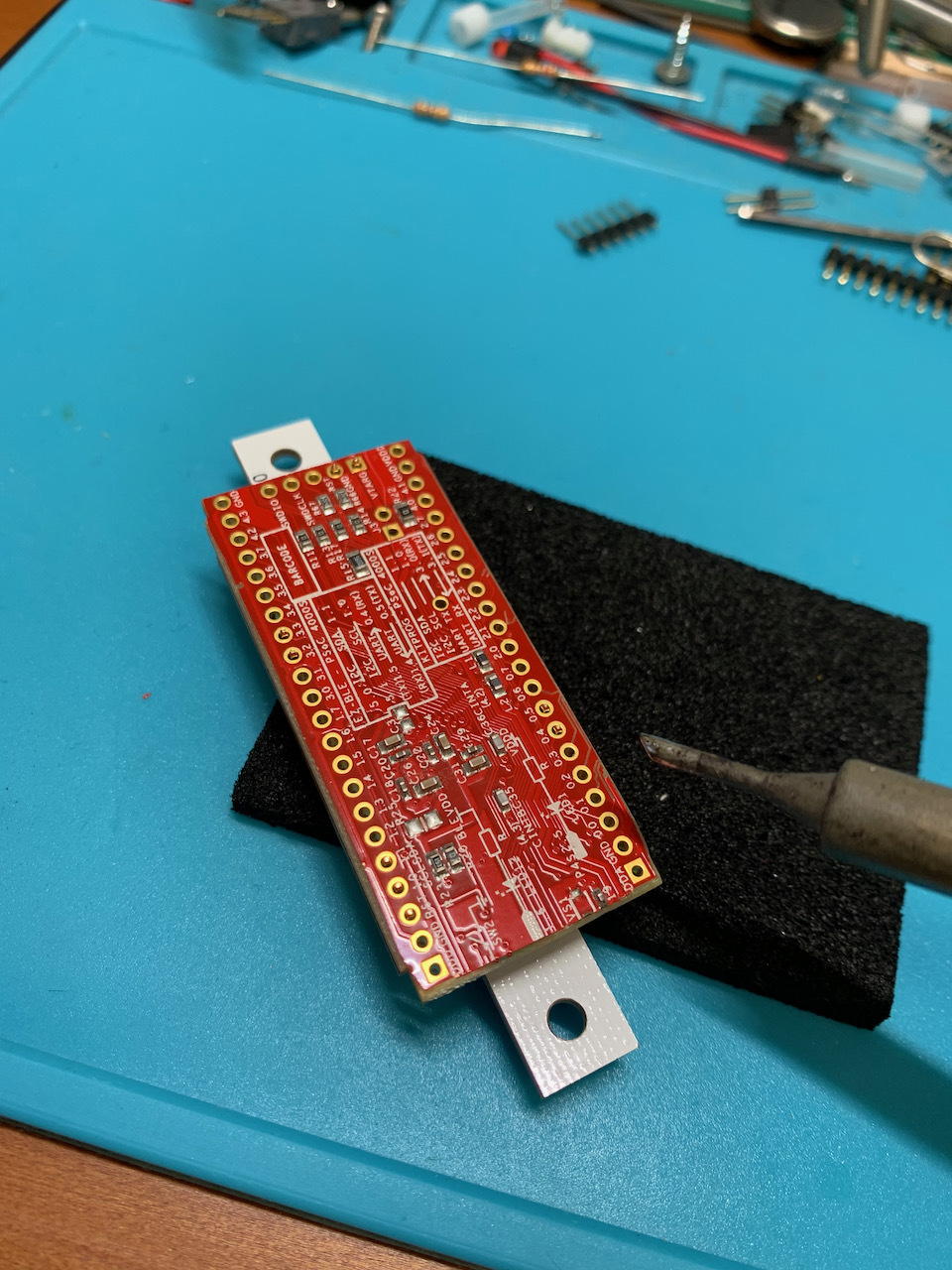
ボードの小型化

写真のように、CY8CKITの基板のタッチセンサーのへりの位置あたりを糸鋸で切断。
周りの子基板も切断

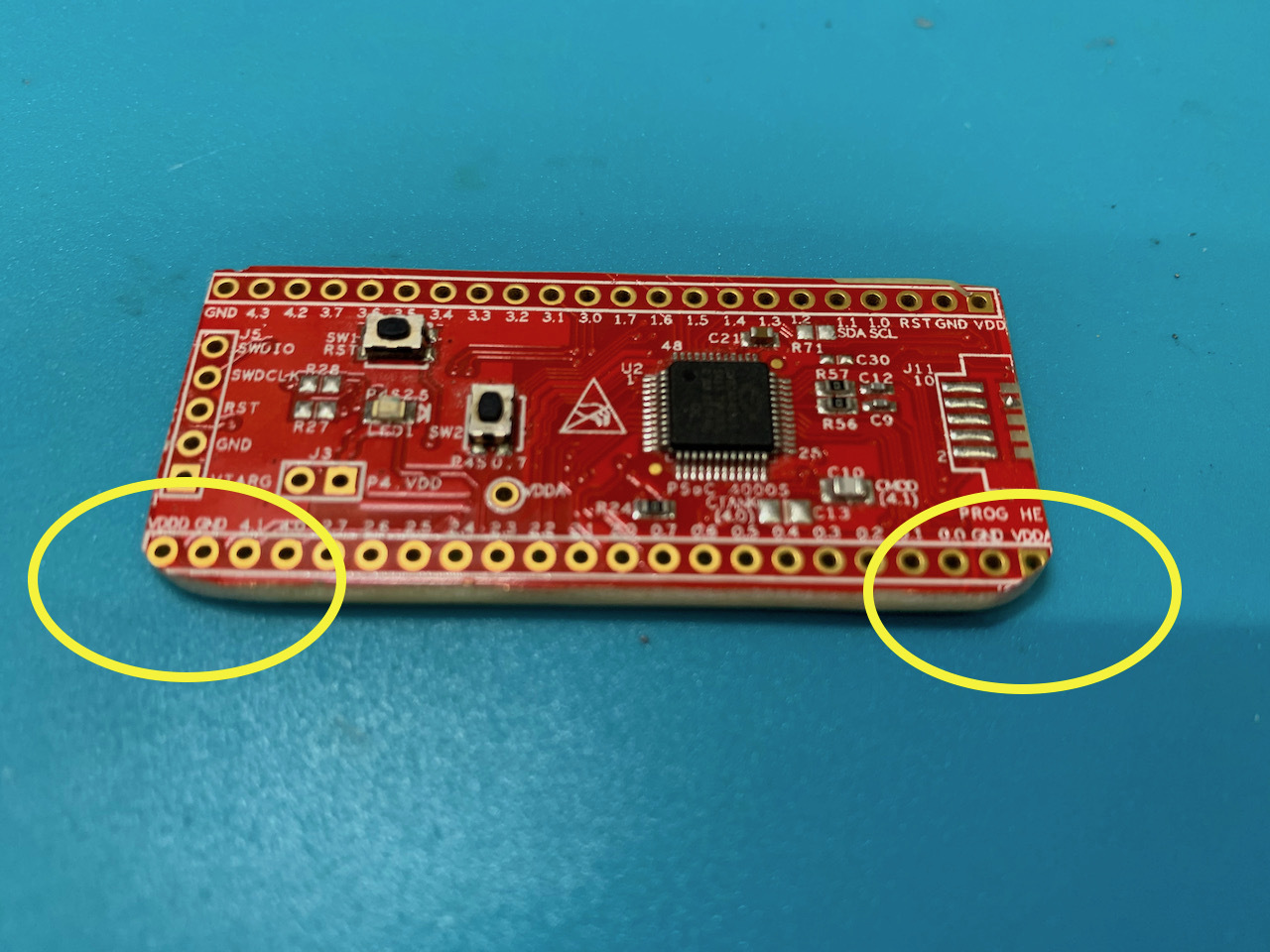
もともと、切断できるようになっている、センサー用の基板、及び書き込み機の基板も切断。
切断部はやすりなどできれいにしておくこと。
また、切断部に複数の信号線が通っているので、これらの処置をきちんとしておくこと。(一度、切断後、隣り合う線が接触していた)
また、p1.2に繋がっているR71の抵抗を除去。
あと、下側の両隅がセンサーサポータに当たるので、少しだけ削って角を丸めておきます。
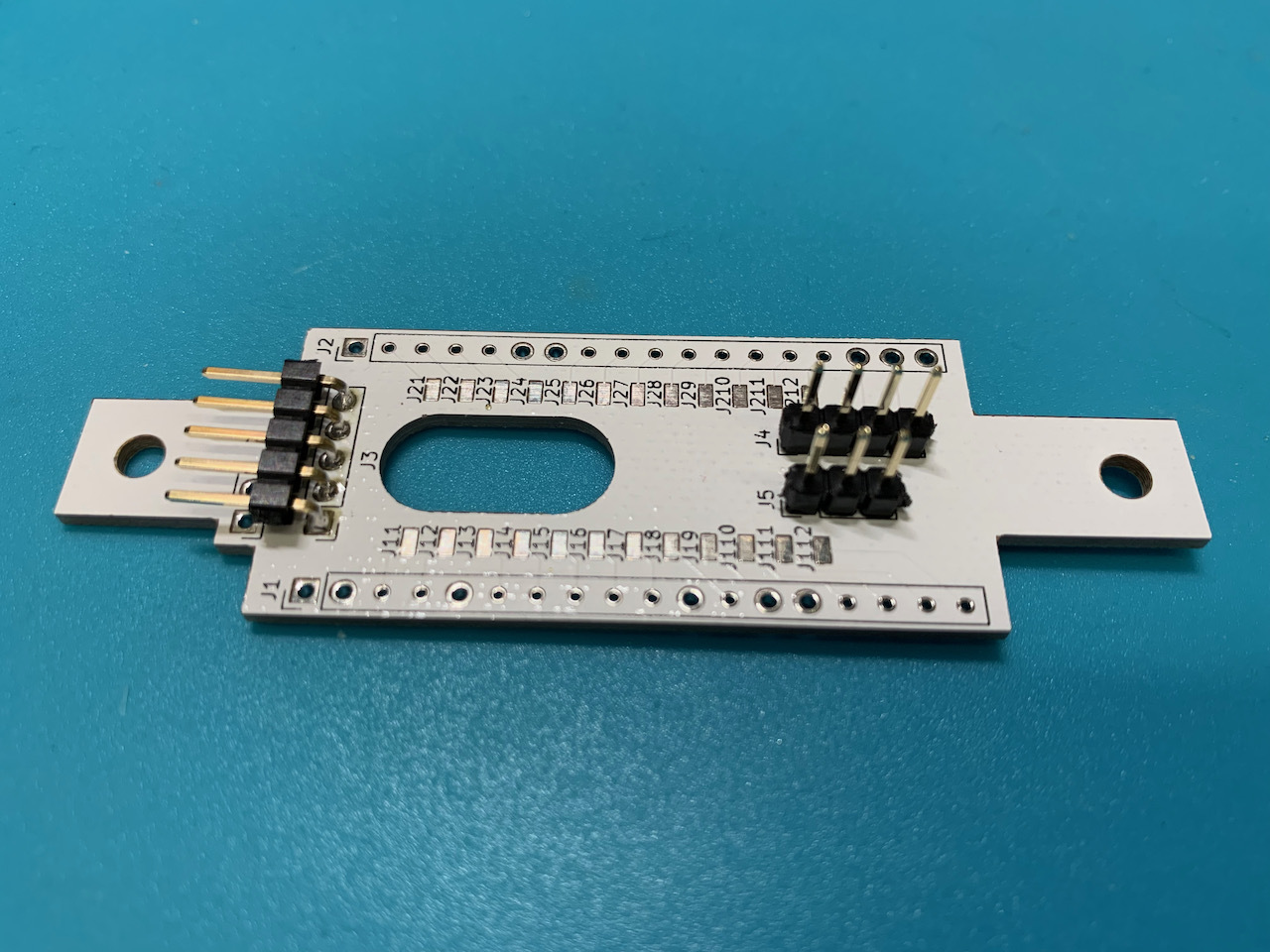
各端子の役割
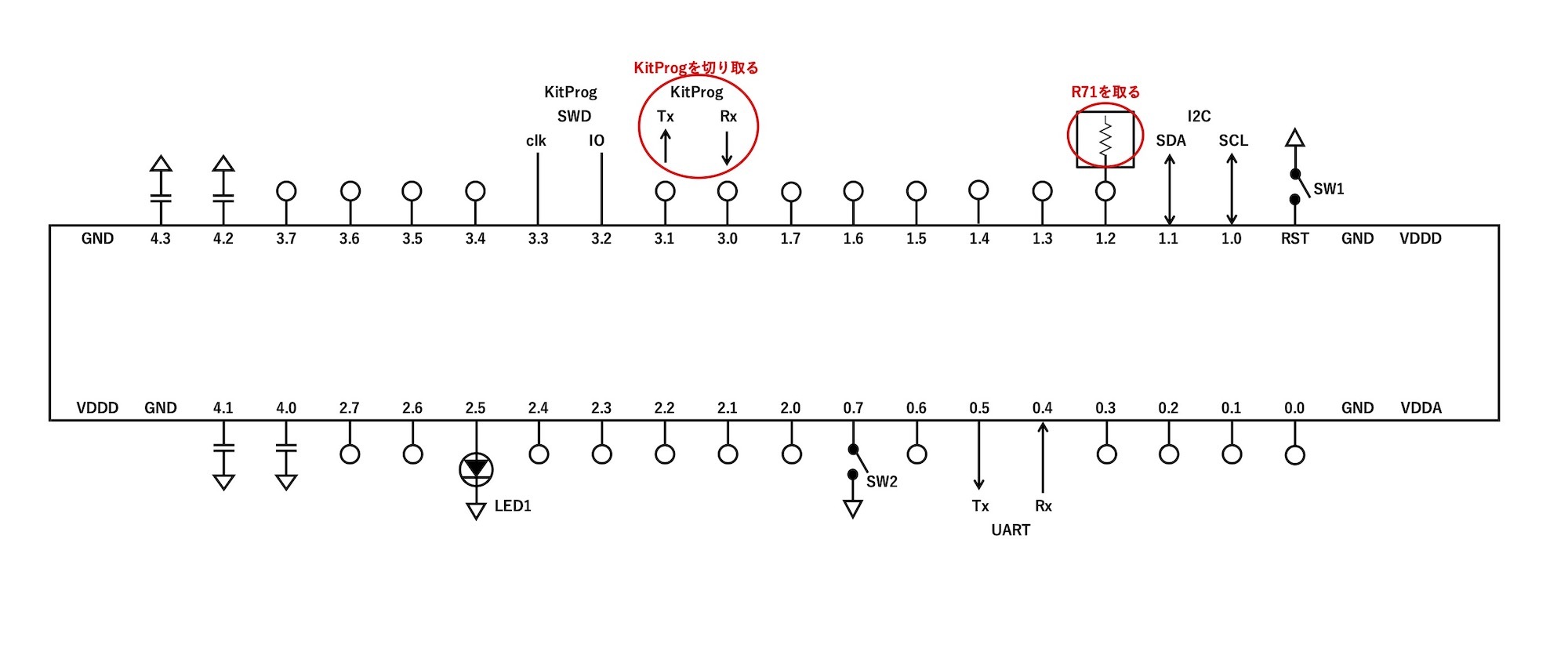
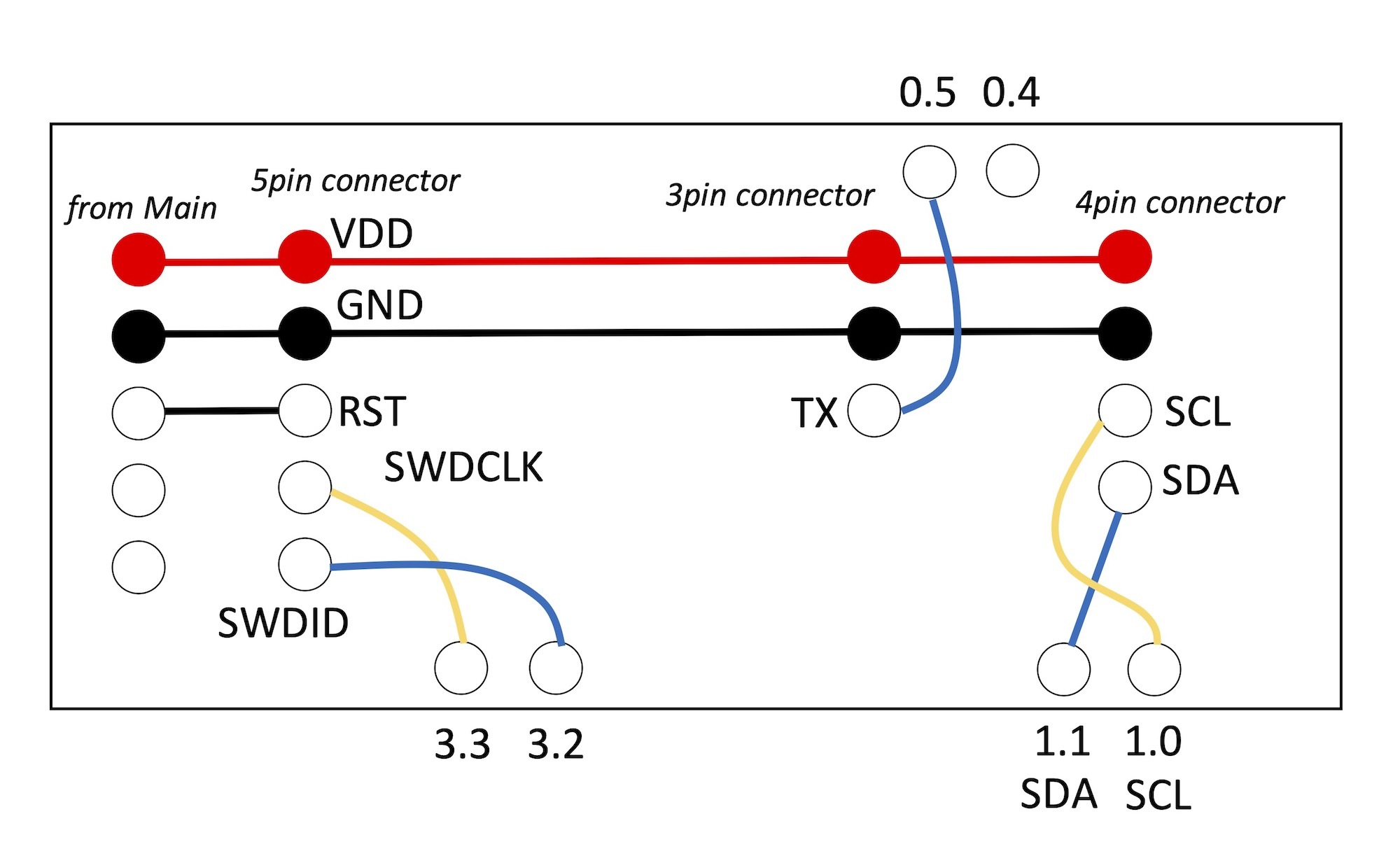
小基板を切り取った状態の基板の端子の役割は、この図の通りです。
図に書いてある通り、端子には I2C, RST, SWD, UART があります。
またそれ以外の丸印が書いてあるピンは静電タッチセンサとなります。
連結用のピンをはんだ付け
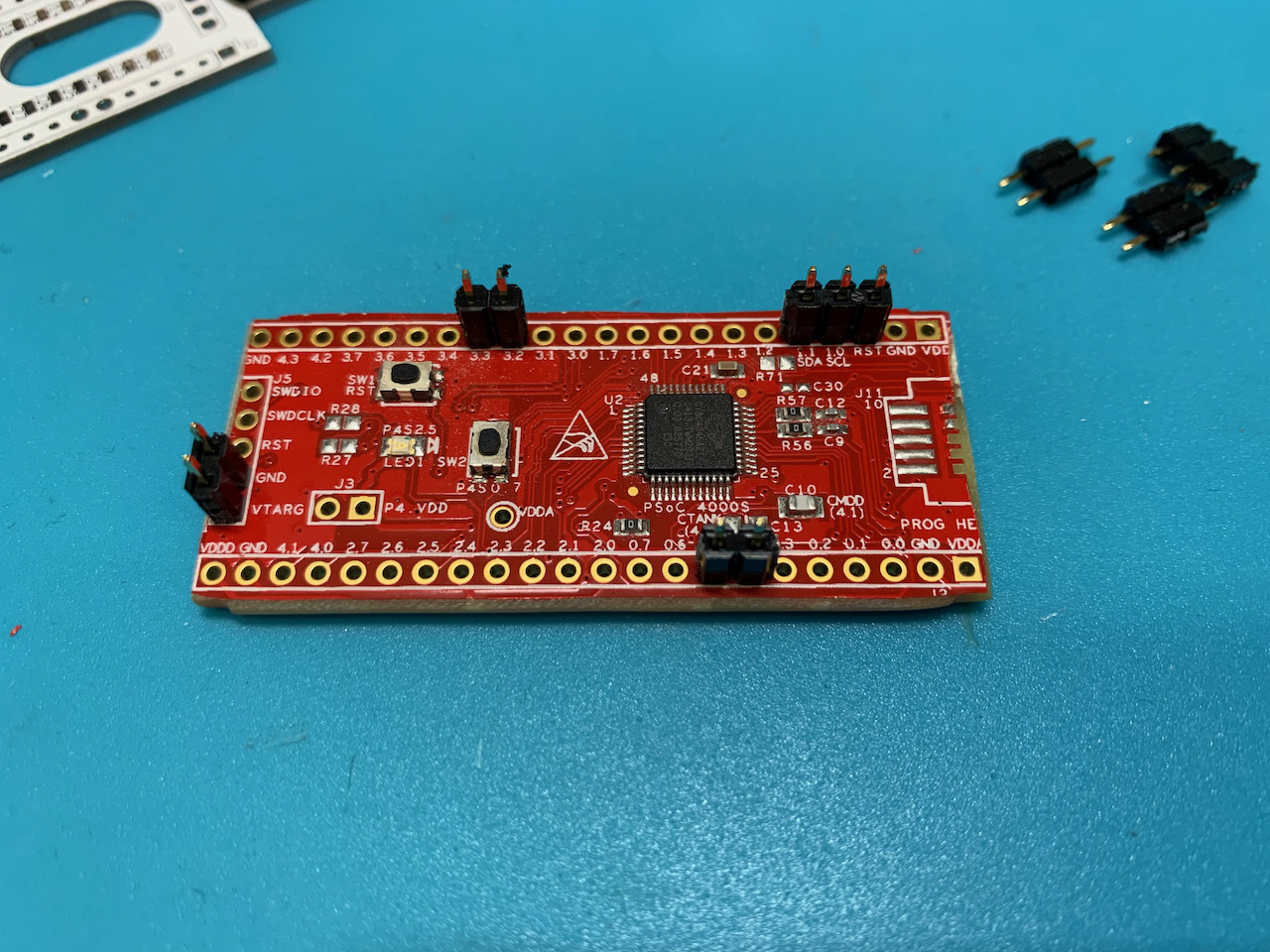
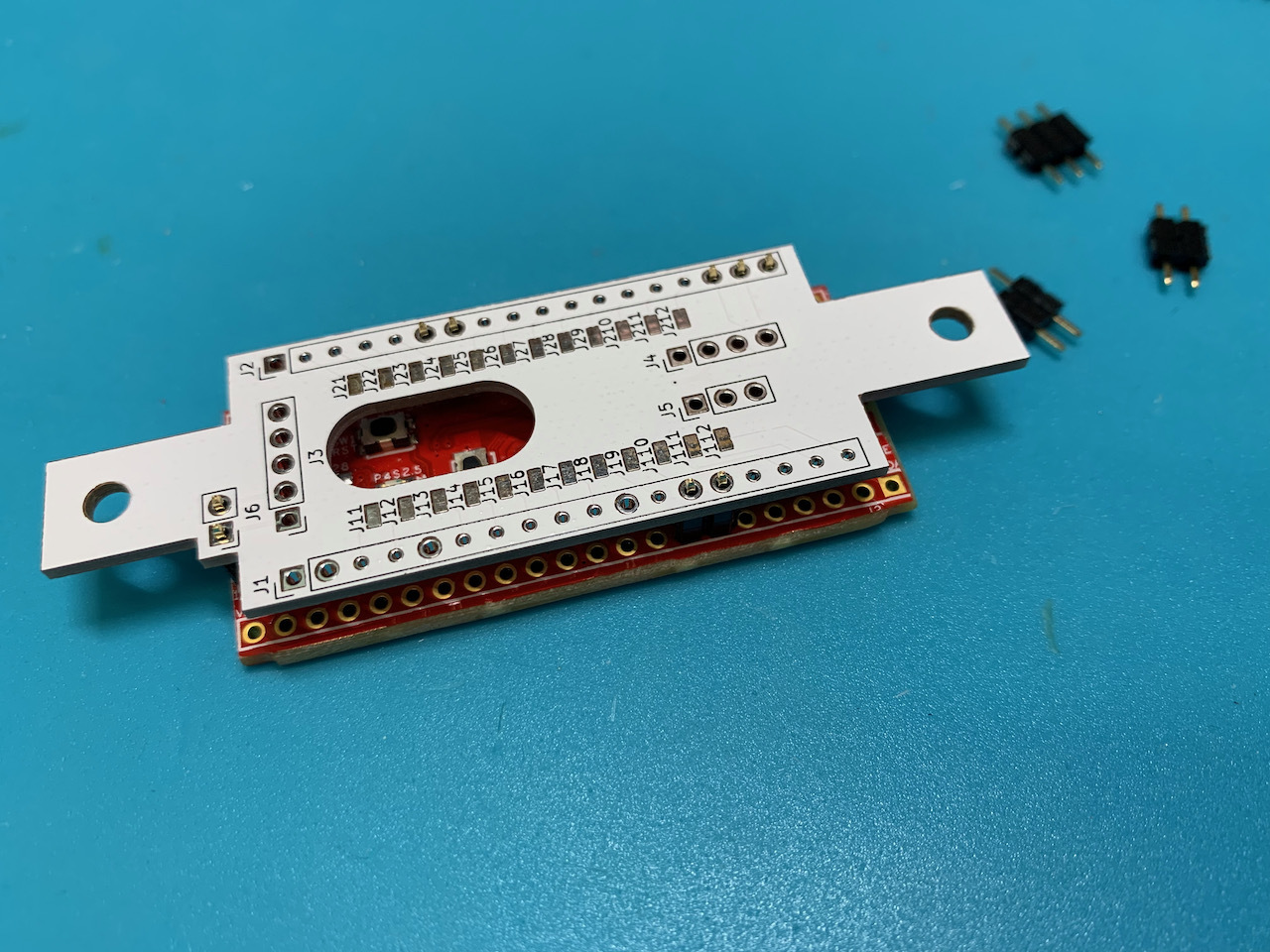
チップやスイッチの付いている側に、5mmの高さの連結用のピンをハンダ付けする。
ハンダ付けするのは、書き込み用の5pinのうちVTARG, GNDの2端子、RST&p1.1&P1.0、p0.4&p0.5、p3.2&p3.3、の計4箇所。
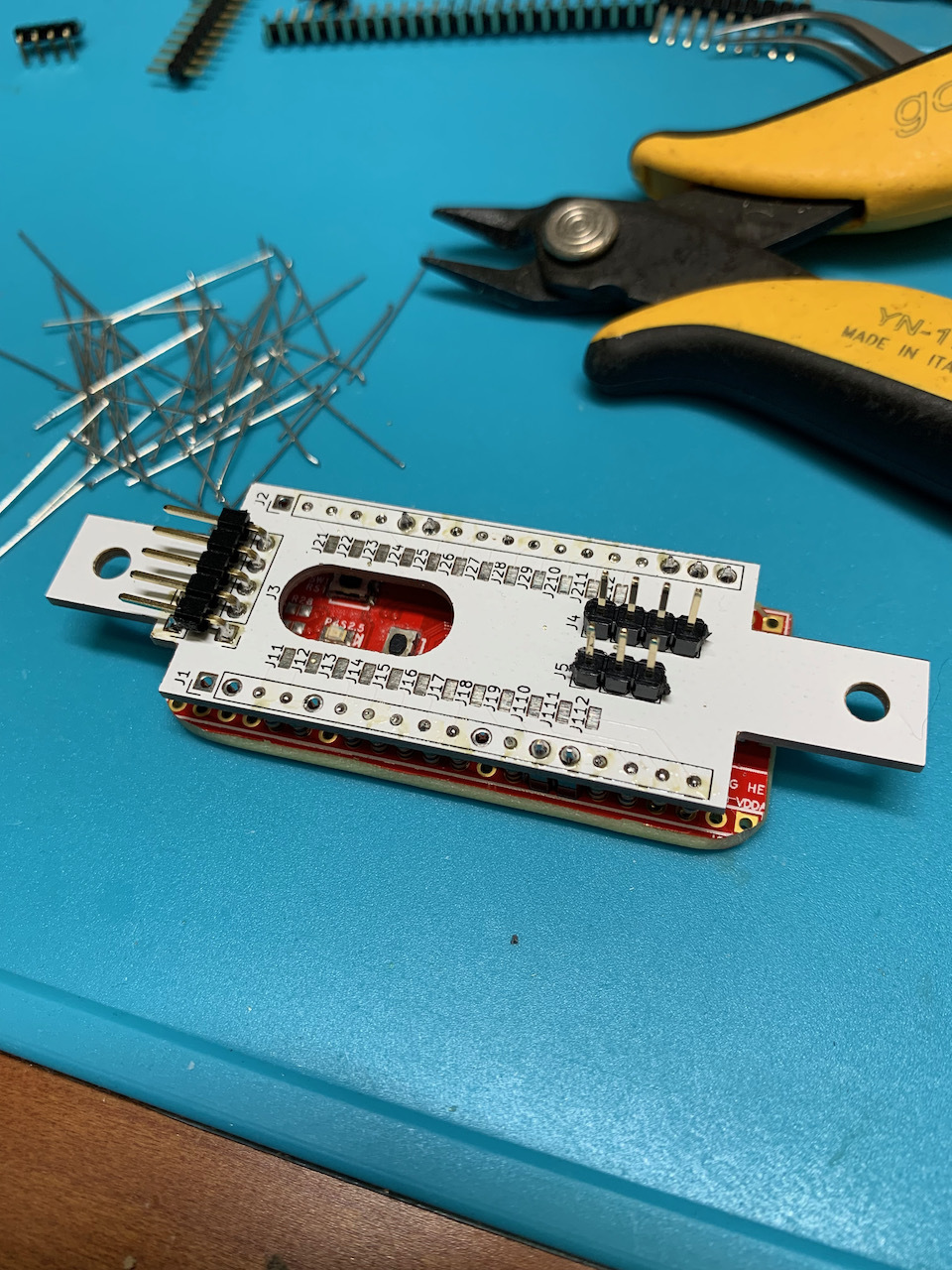
一度、ピンを置いて、サブ基板とサンドイッチ状態にした後、裏返してメイン基板の裏側からハンダ付けする。
サブ基板の準備とメイン基板との合体
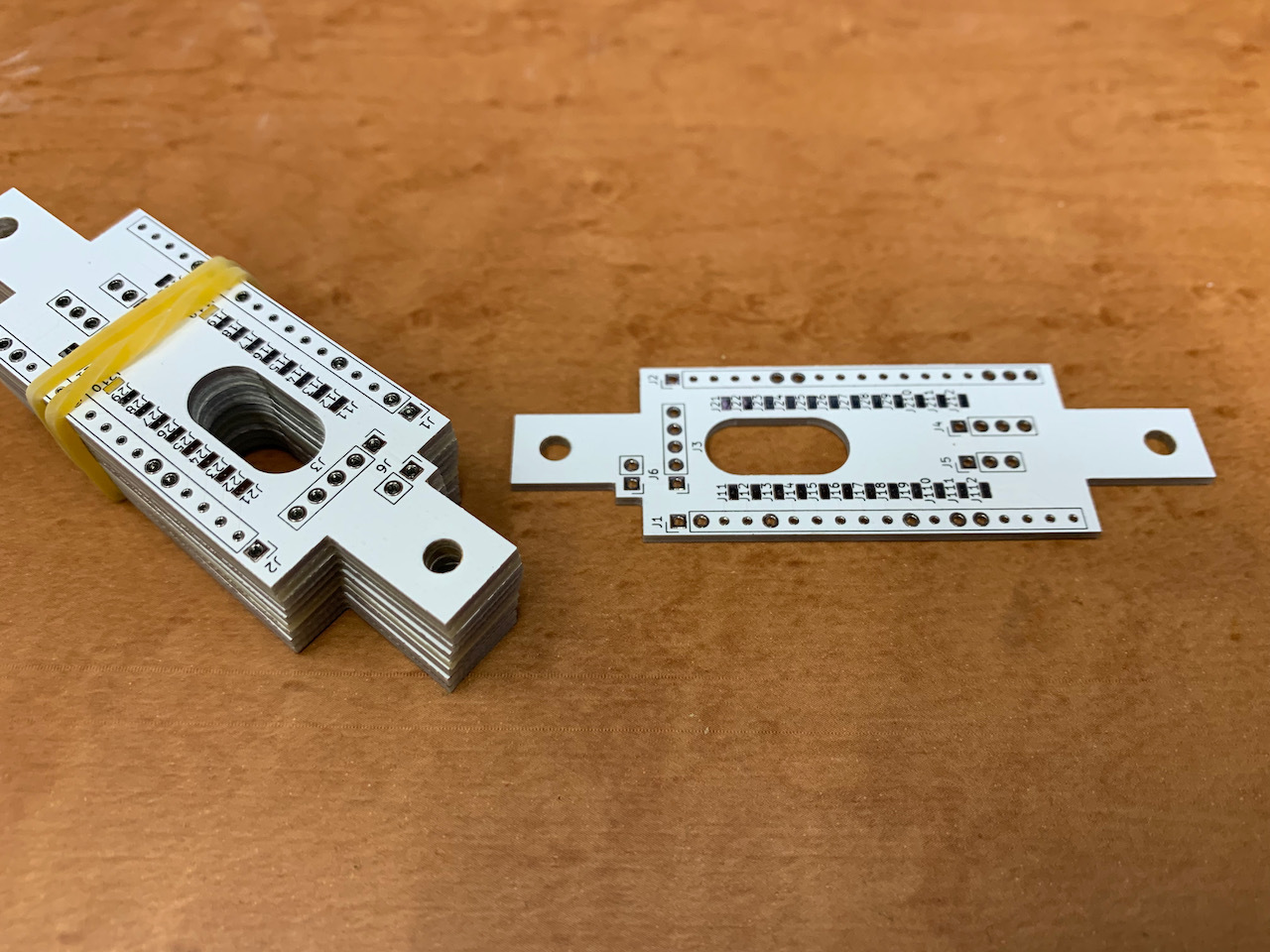
発注して製作してもらったサブ基板をメイン基板と合体させます。
サブ基板にピンヘッダをハンダ付け
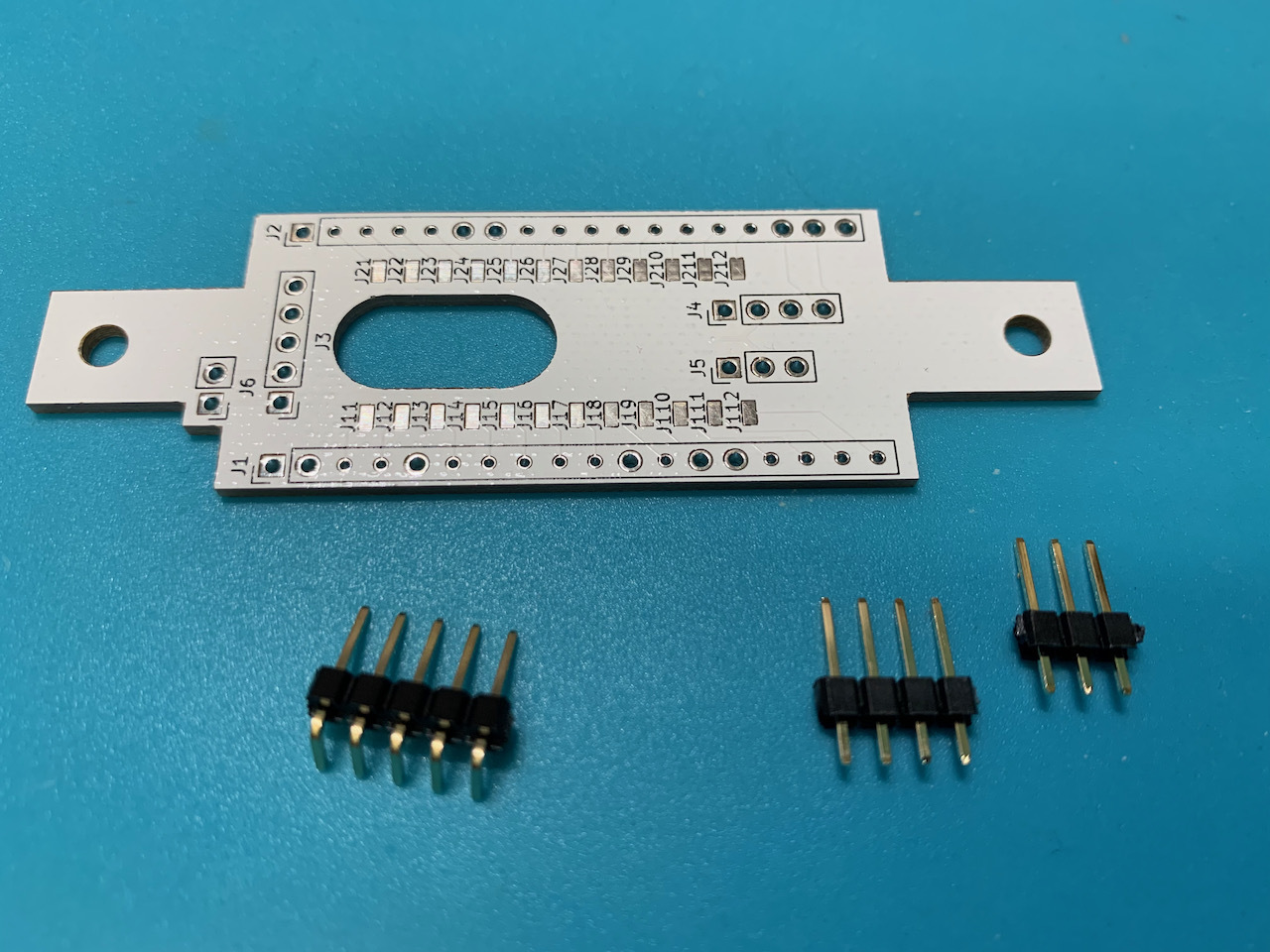
サブ基板に5pin/4pin/3pinのピンヘッダをハンダ付けします。
560Ωの抵抗の取り付けとメイン基板の合体
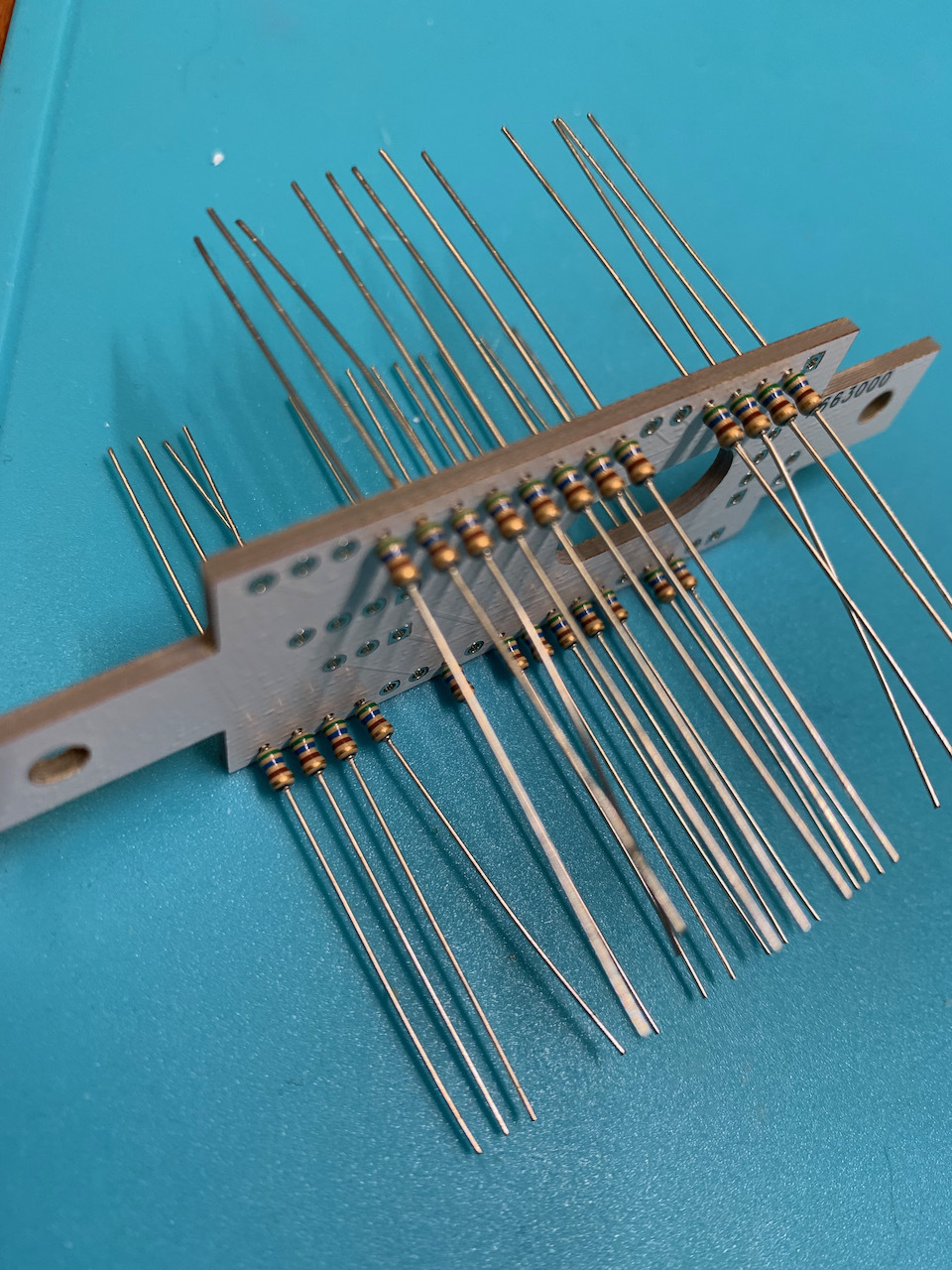

まずサブ基板に560Ωの抵抗を差し込みます。
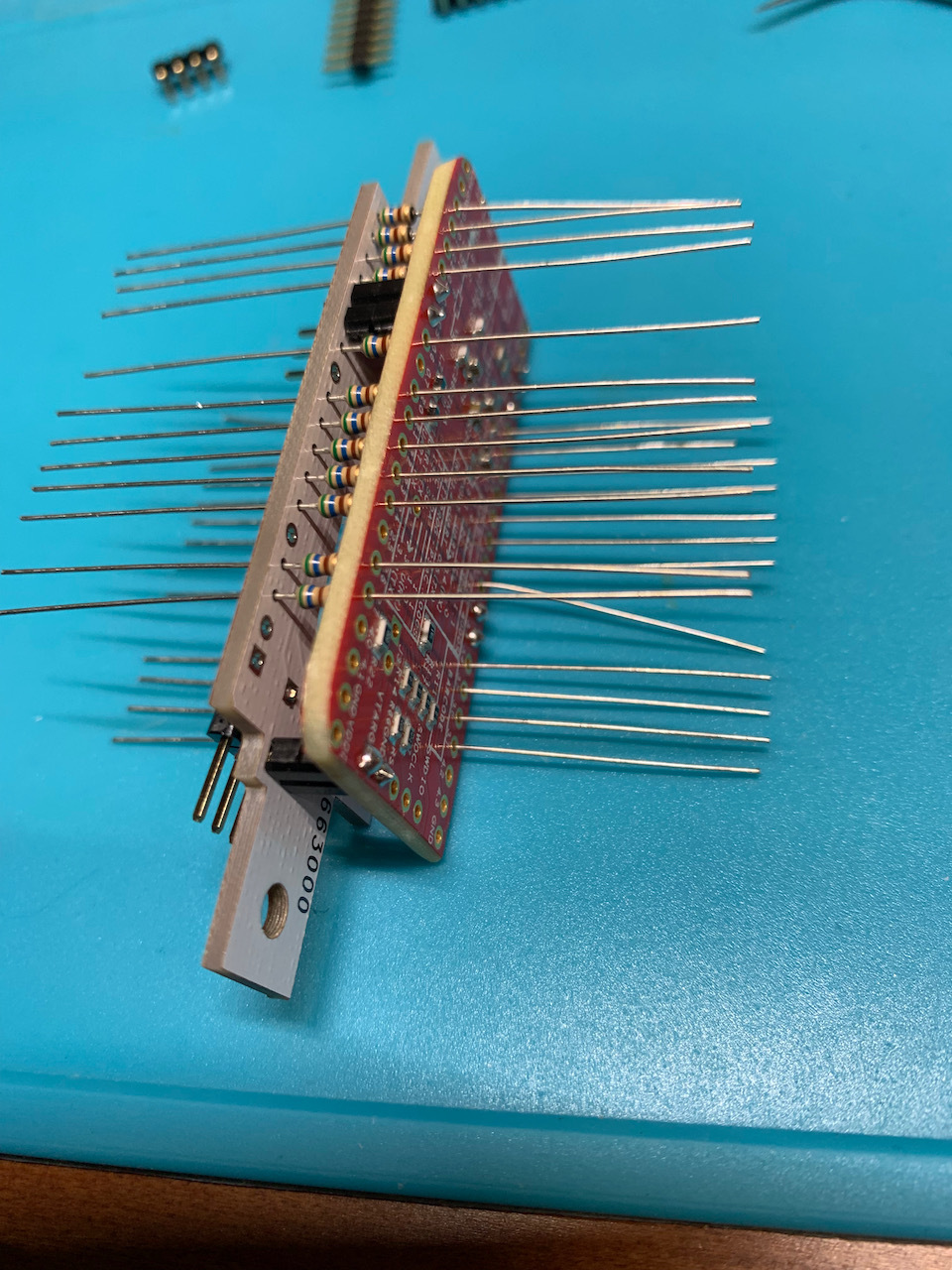
次に、メイン基板の両側のピンの穴にピンセットを使って、一本一本抵抗の足を挿していきます。
サブ基板とメイン基板で抵抗を挟み込んで、最後に各ピンをハンダ付けします。
ユニットの3Dプリント
ユニットを3Dプリンタで印刷し、静電センサーを取り付けて、円筒の内側に当てるセンサーを製作します。
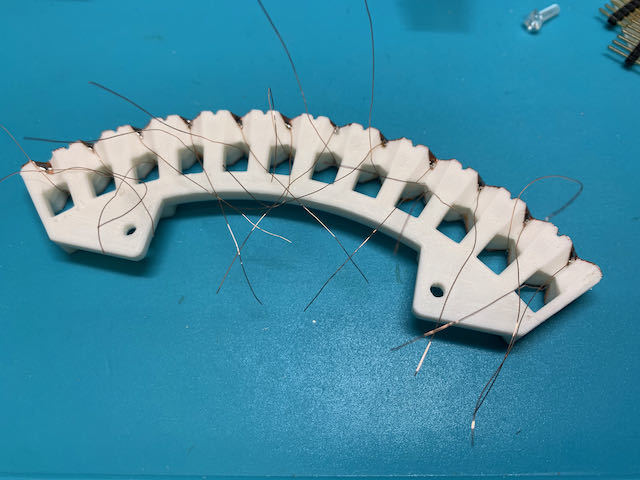
サポータを3Dプリント
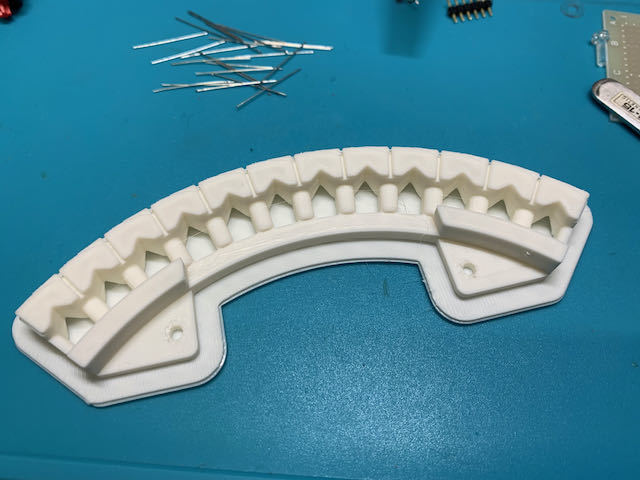
3Dプリンタにてセンササポータを出力。ラフトをきれいに剥がします。
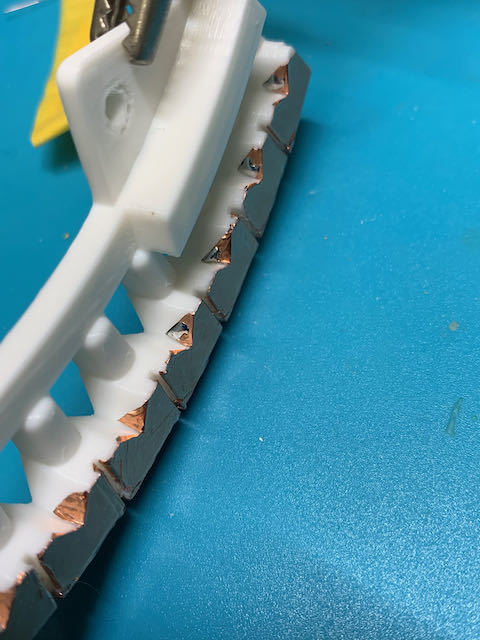
銅箔テープを貼る

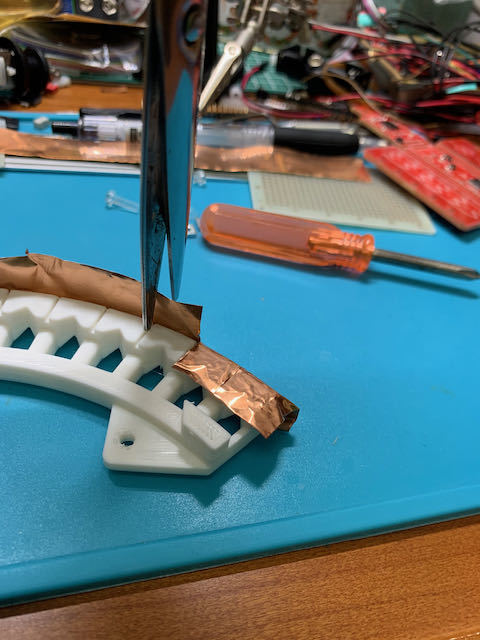
写真のように一枚の銅箔テープを貼って(15cm×3cmあればOK)、天井側は写真のように縦に切り込みを入れてから、テープを折り込んで、センサ部分を覆っていく。
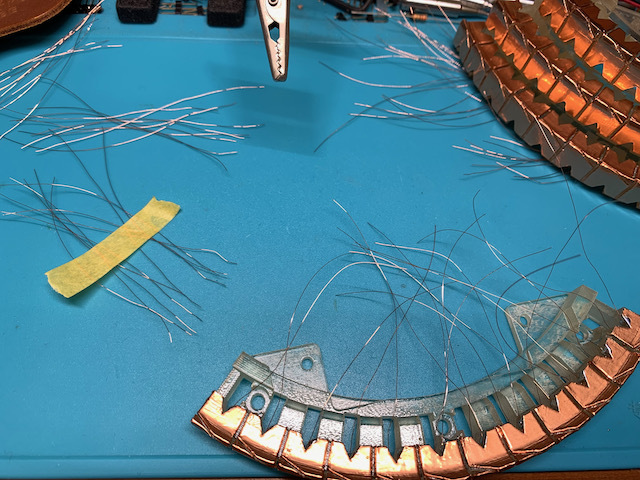
電極を溝に沿って切り離す
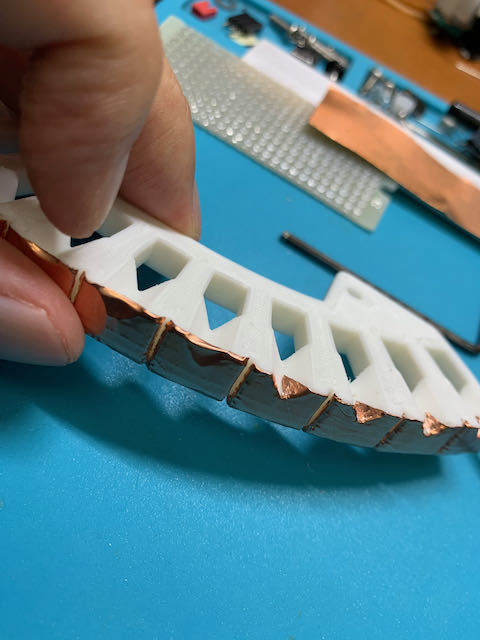
センサ部に貼った一枚の銅箔を、サポータに印刷された溝に沿って24個のセンサーになるように分離する。
カッターを慎重に扱い、導通しないように電極が目視で分離していることが認識できる程度に切り離すこと。
また、各センサーには三角形の切り欠きがあるので、切り欠きを上にしたとき、三角形の左辺側に切り込みを入れ、右辺を内側に折り曲げてサポータ本体に貼り込む。
ポリウレタン線をハンダ付け
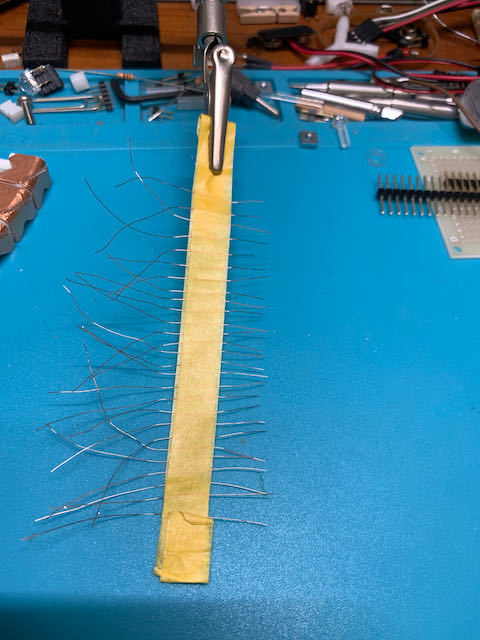
三角形の切り欠け部で折り曲げた銅箔の上に、ハンダを軽く置いておき、その場所に皮膜を剥いだポリウレタン線をハンダ付けする。
なお、ポリウレタン線は最長で7cm程度となるので、8cm程度に切っておけば問題なし。
基板とサポータの組み立て
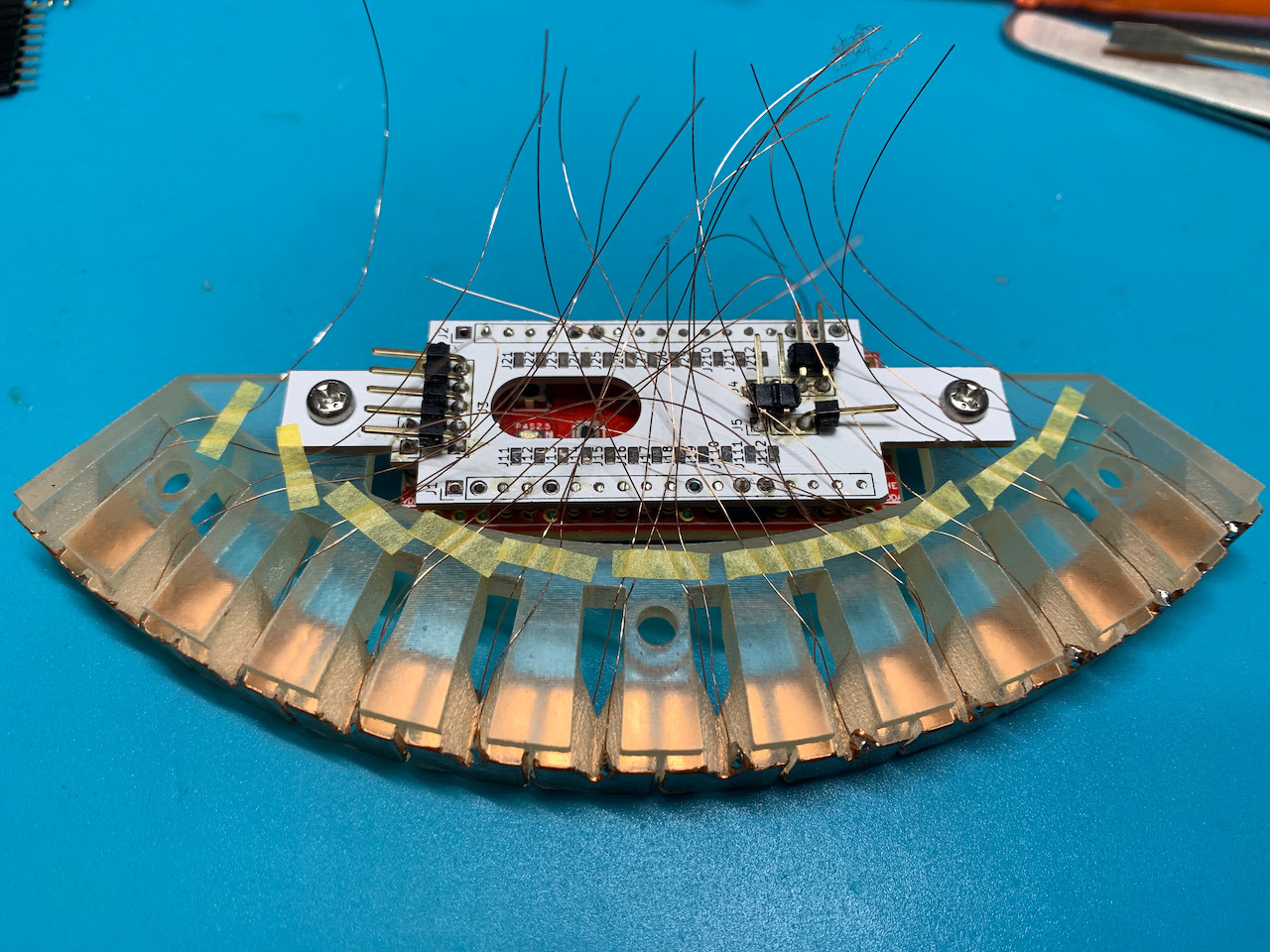
基板をサポータにネジ止めし、各静電センサからのポリウレタン線を基板に繋ぎます。
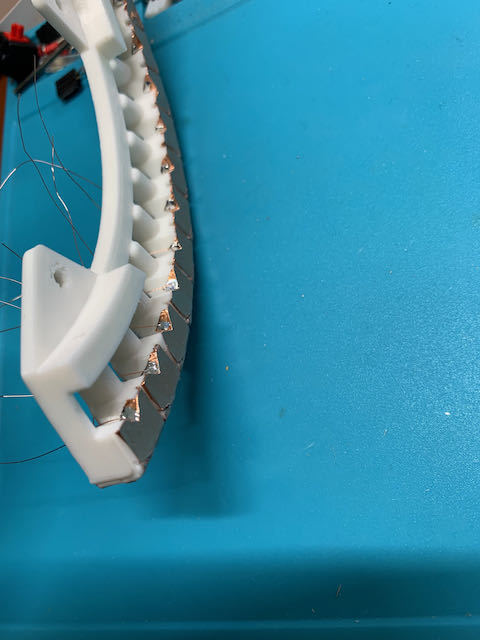
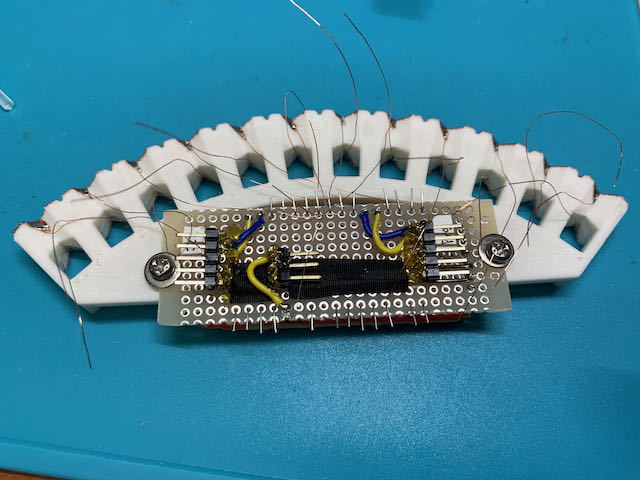
基板をサポータにネジ止めする
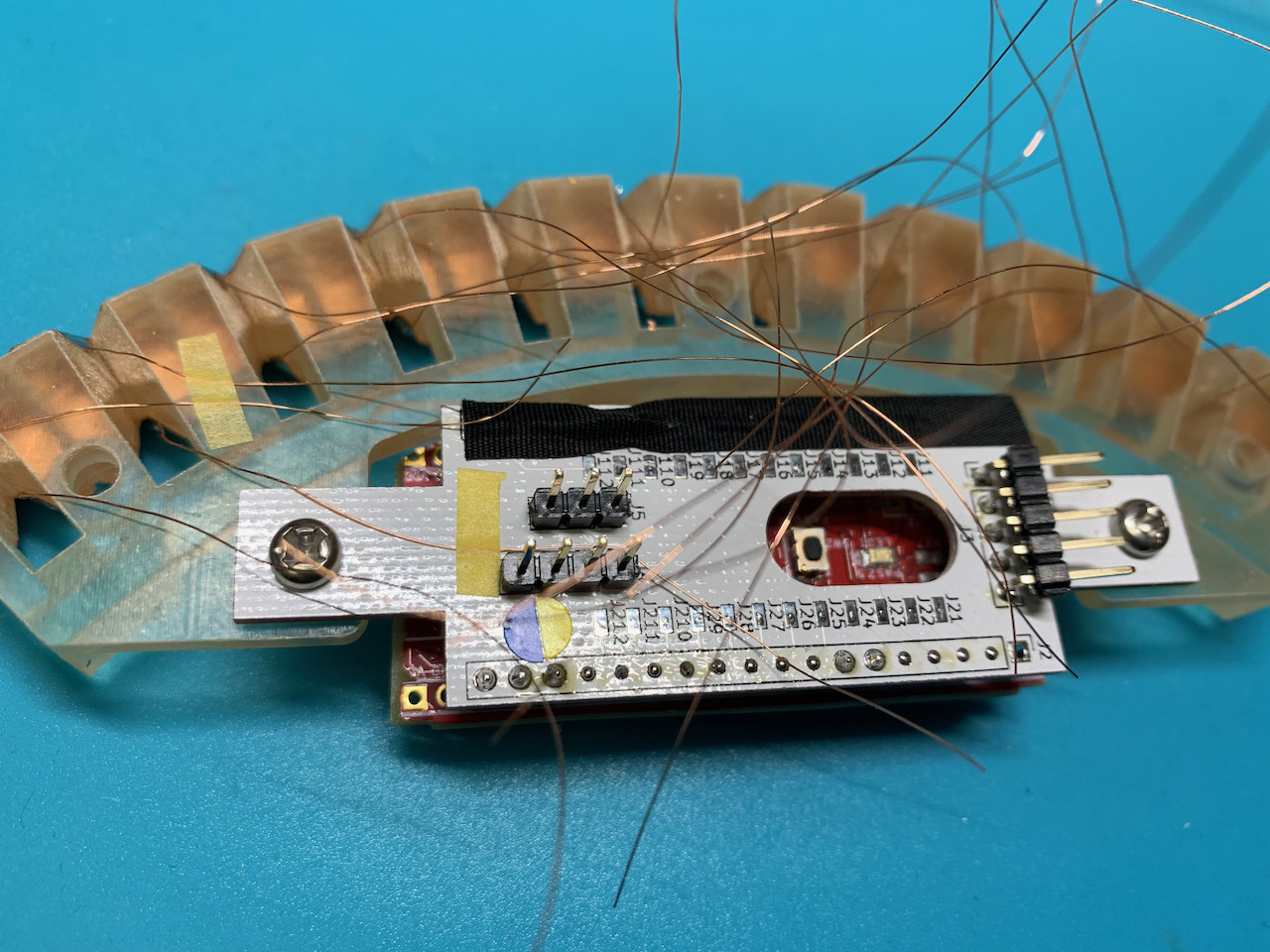
写真の向きに基板をサポータにネジ止めします。
また、各センサにハンダ付けされたポリウレタン線を整理し、基板の接点に近づけるようにまとめて、テープで軽く固定しておきます。
また、基板の内側の端子を、ポリウレタン線がなるべく接しないように絶縁テープで覆っておきます。写真では、黒く細長くテープが貼ってあるのがわかると思います。
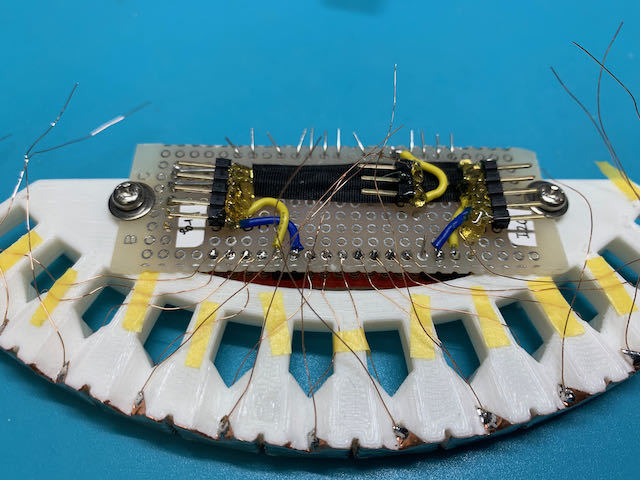
ポリウレタン線を基板にハンダ付け
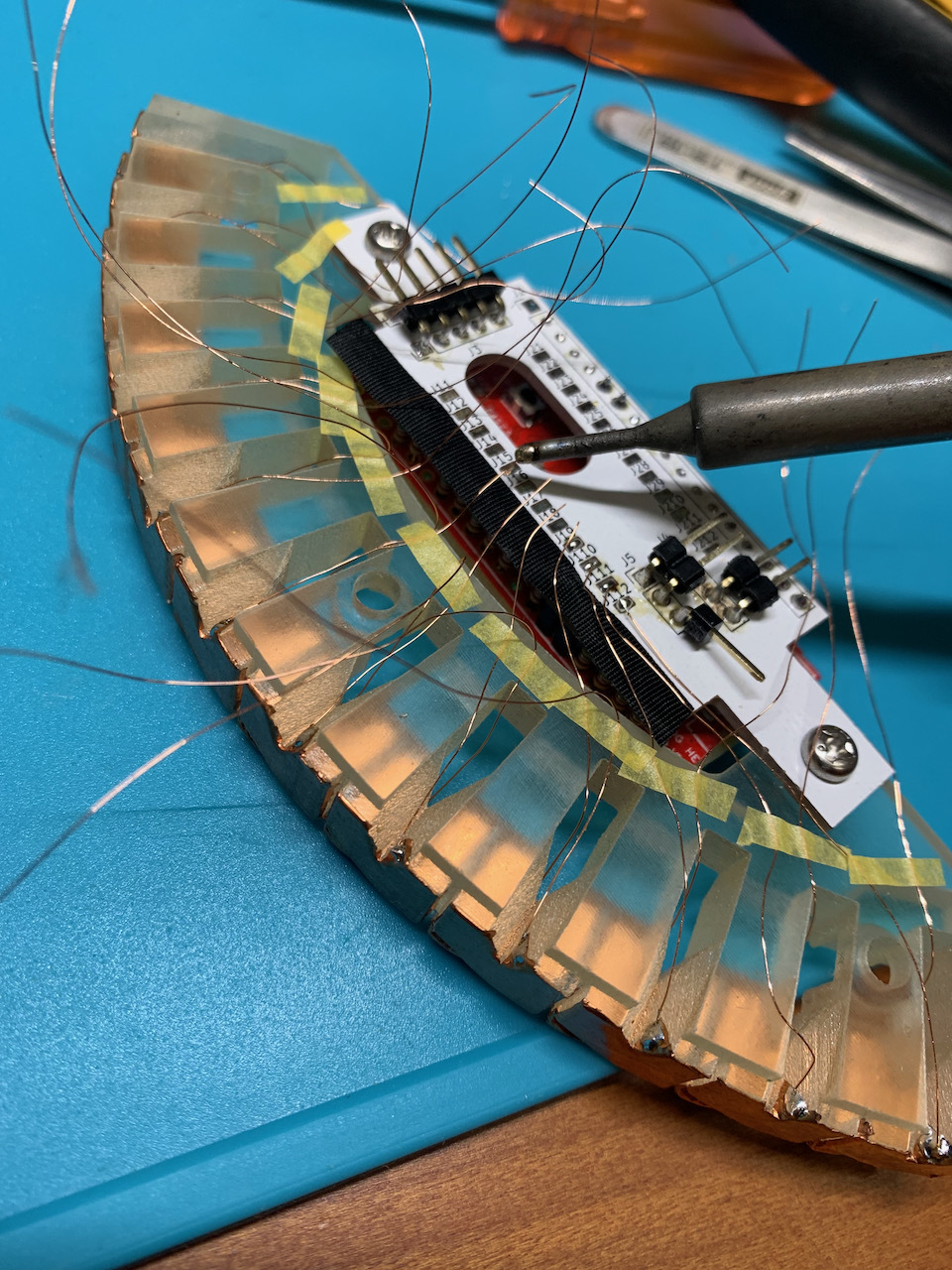
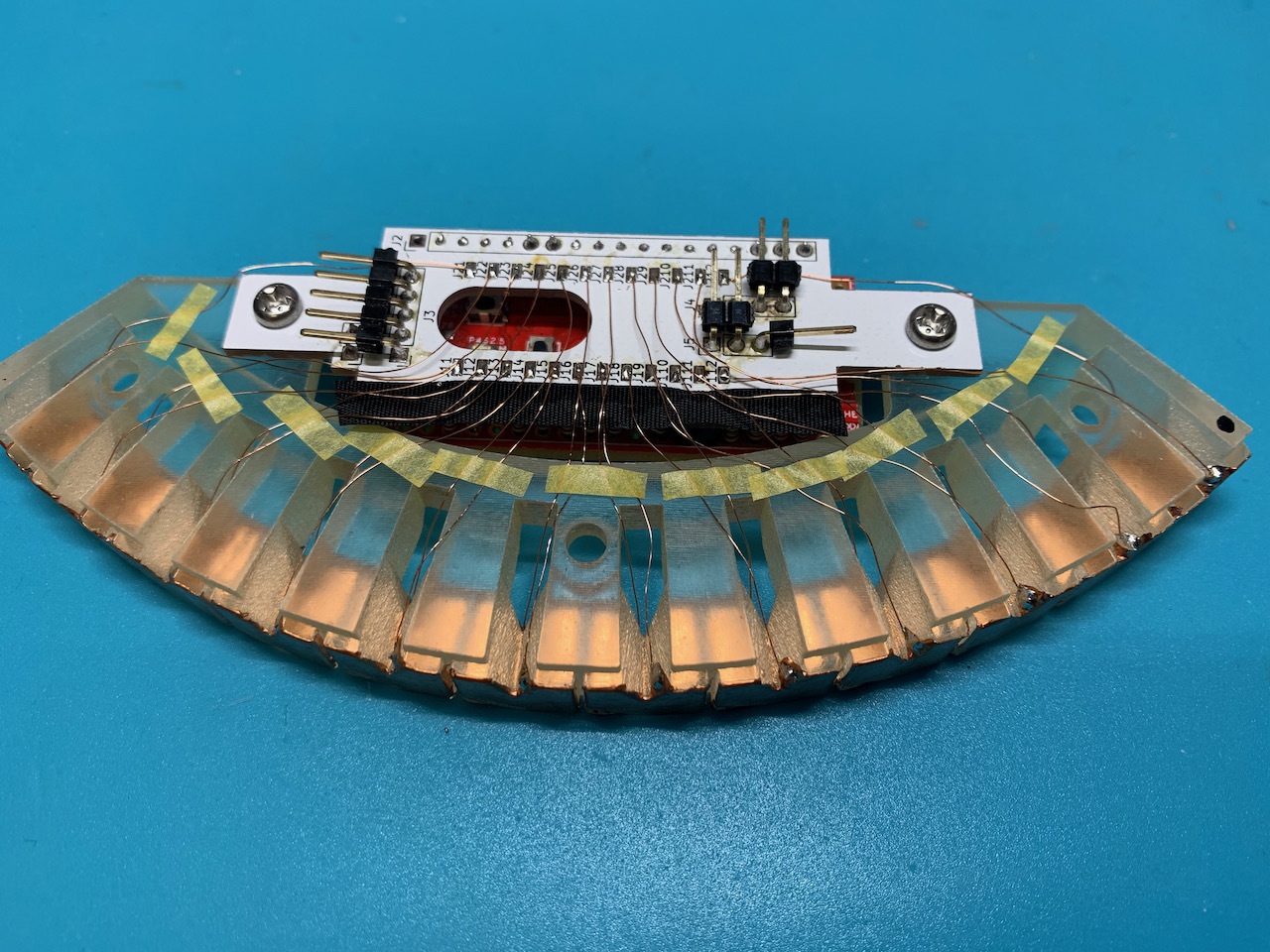
上面側のセンサーからのポリウレタン線を内側(センサ側)の端子に、側面側のセンサーからのポリウレタン線を外側の端子に、それぞれハンダ付けしていきます。ハンダ付けしながら、ポリウレタン線を適宜テープなどで固定しておきます。
センサユニット用ケーブル作成
円筒にはセンサーが4つ必要になるので、それらを接続するためのケーブルを作成します。センサーの一つがI2Cのマスターになり、その他の3つがスレーブになります。
必要なもの
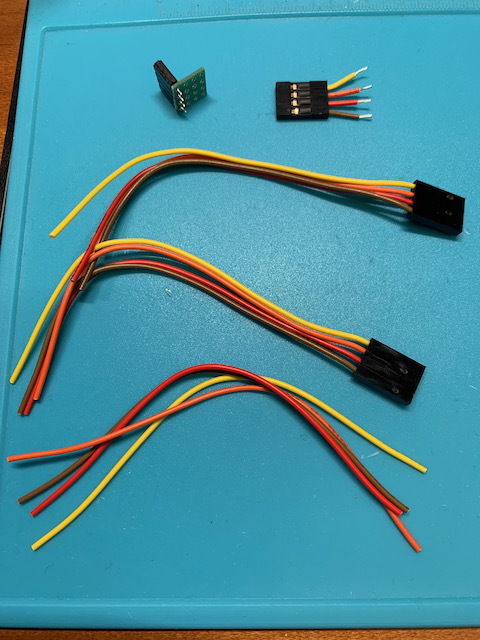
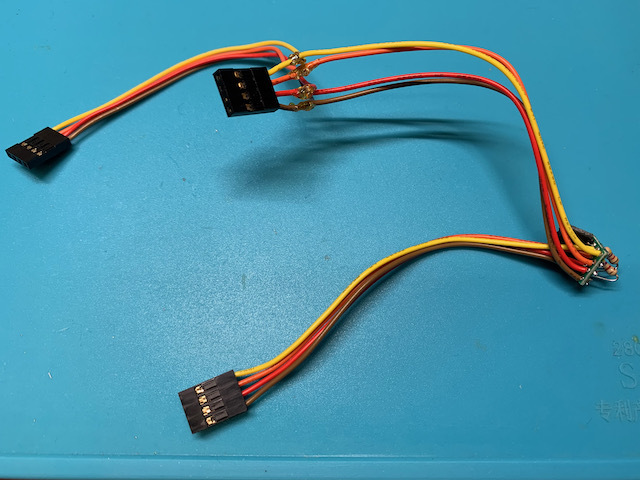
写真のようなケーブル関連部品が必要です。
- [A]メスの4pinソケットとそれにハンダ付けする小型基板
- [B]4pinピンヘッダ用のメスコネクタ、ケーブル長さ極小
- [C]4pinピンヘッダ用のメスコネクタ、ケーブル長さ10cmを2本
- [D]4本のケーブル、長さ10cm
二股配線
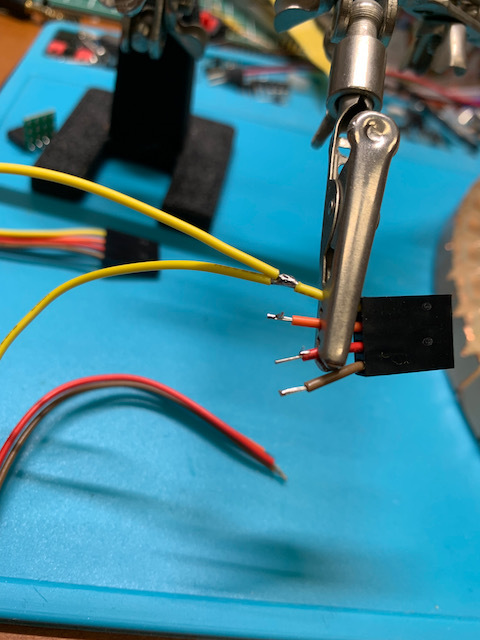
[B]極小メスコネクタのケーブルに、長さ[D]10cmのケーブルと[C]メスコネクタ付きケーブルを、二股状にハンダ付けします。
ハンダ付け後絶縁しておきます。
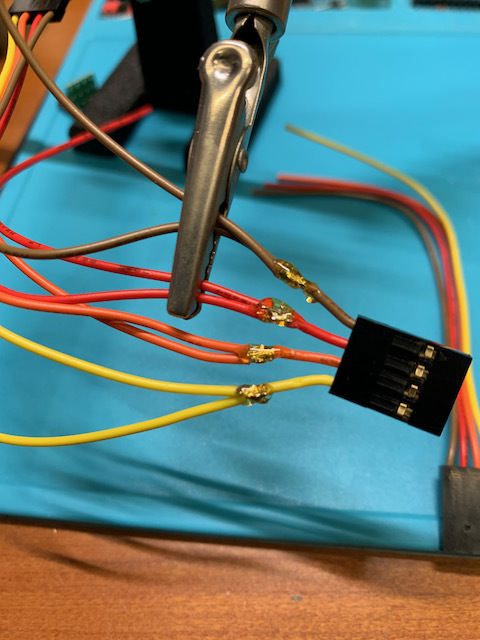
基板にケーブルをハンダ付け
写真のように、[C]10cmのメスコネクタ付きケーブルと、先ほど作った二股ケーブルの[D]ケーブル側を、[A]基板にハンダ付けします。また、各ケーブルと基板に付けてあるコネクタを配線します。
また、4.7kΩのプルアップ抵抗も付けておきます。
プログラム書き込み
円筒に配置するには、4つのセンサユニットが必要です。そして4つともプログラムを書き込むときは、全て別のセッティングにする必要があります。
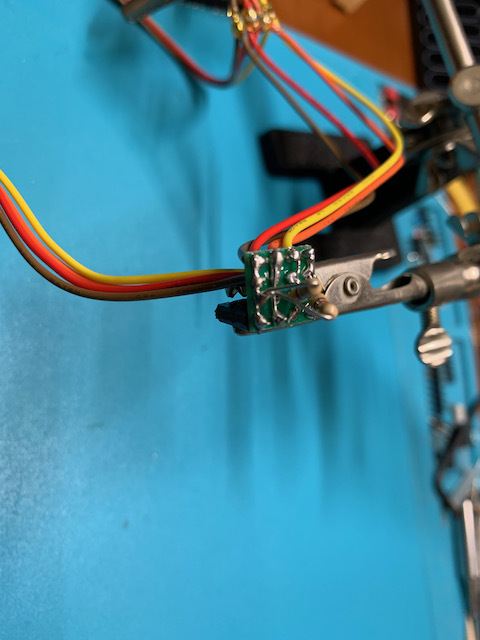
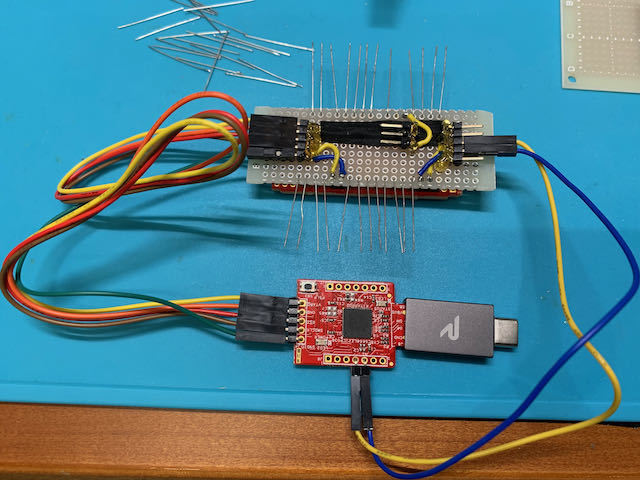
書き込み時のケーブル接続
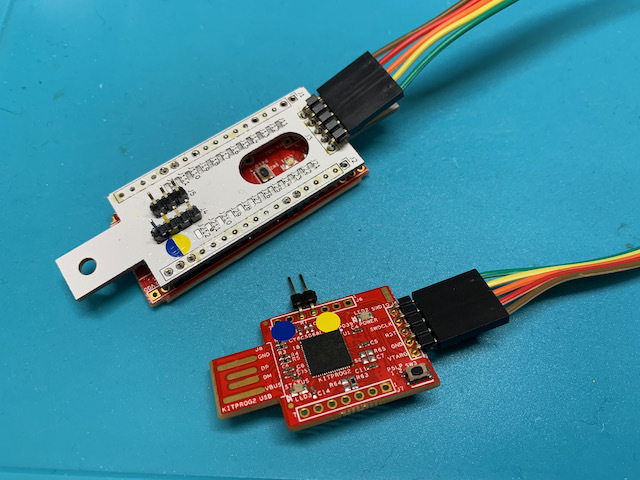
写真のように、書き込み用の基板とセンサー基板をケーブルで接続する。
Masterの書き込み
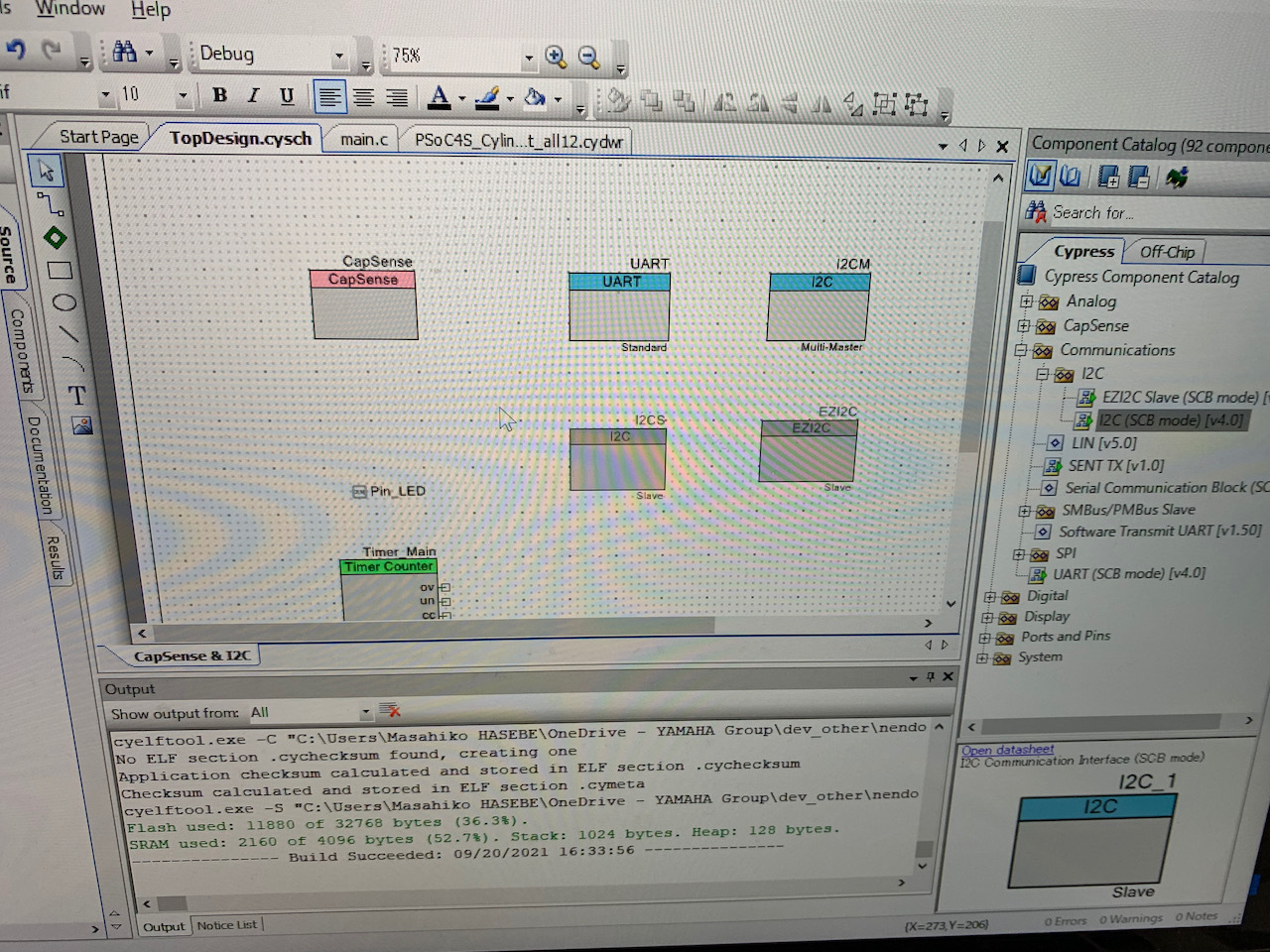
PCに対してシリアルを出力するボードはMaster Boardとなる。
まず、PSoC Creator で、PSoC4S_CylinderEdgeDetect_all12 のプロジェクトを開く。
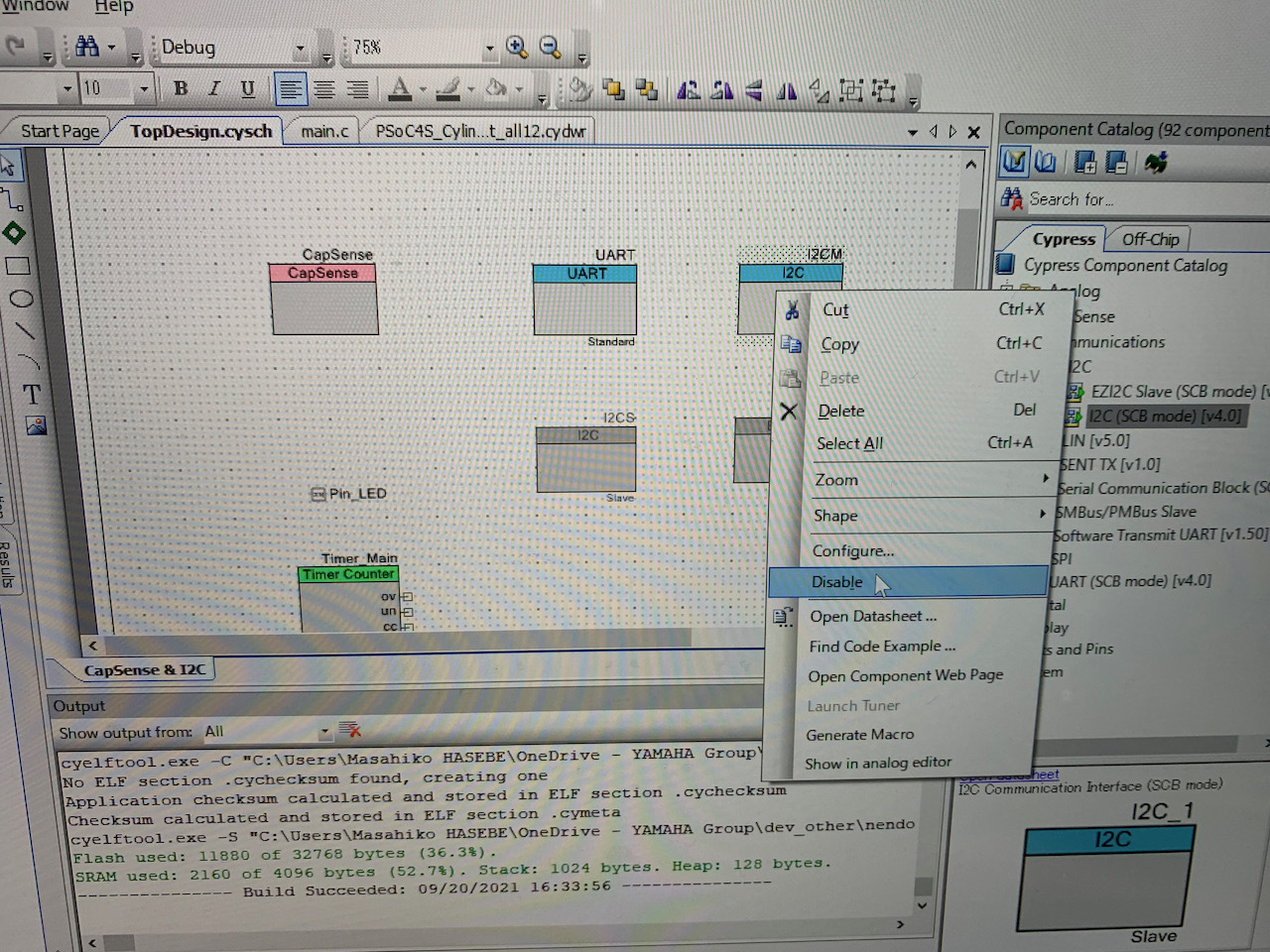
TopDesignで、
UART : enable
I2CM : enable
I2CS : disable
EZI2C : disable
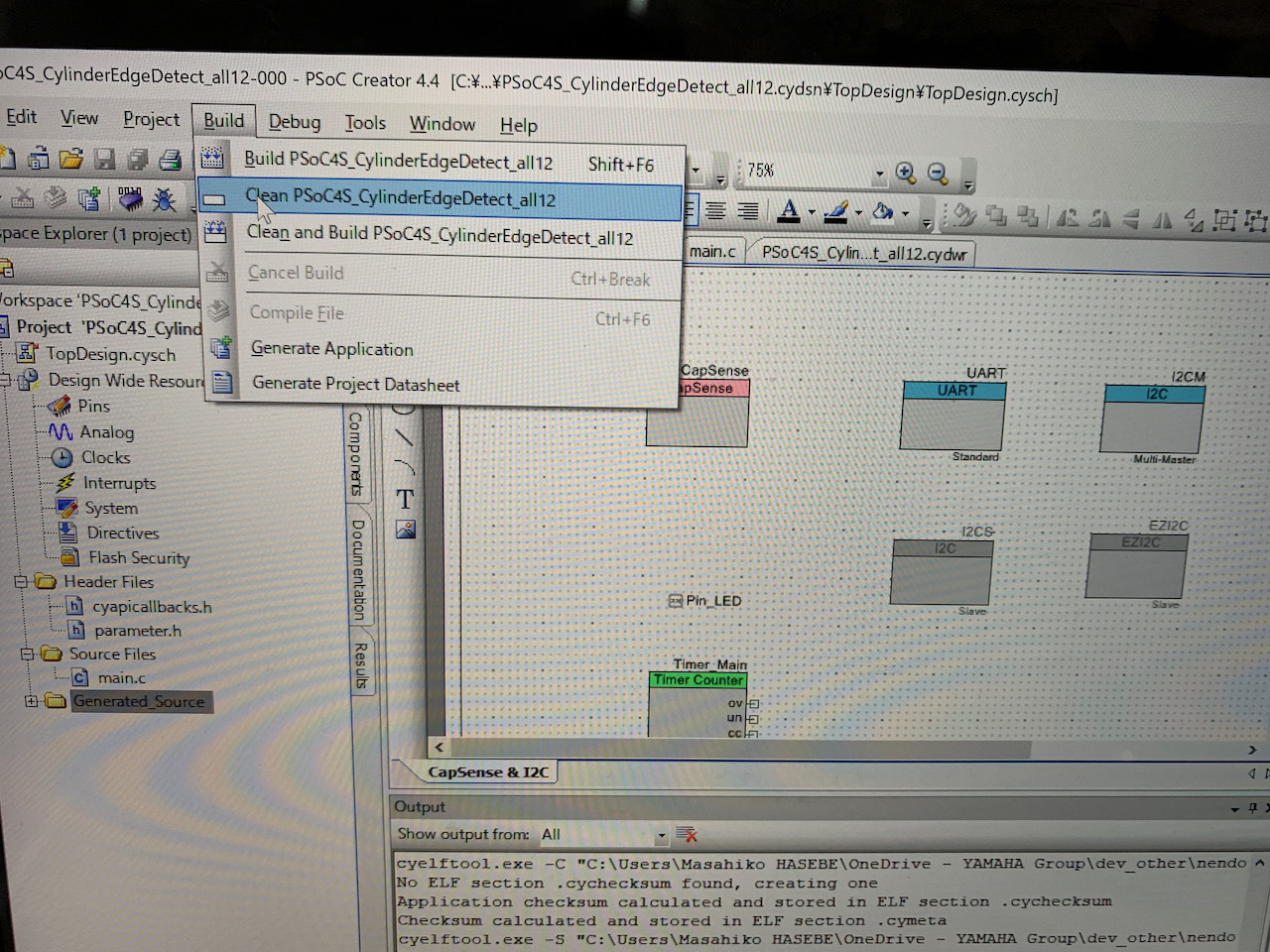
main.c で、
BOARD_TYPE を MAIN_BOARD にして、clean->build
Slave 1-3 の書き込み
TopDesignで、
UART : disable
I2CM : disable
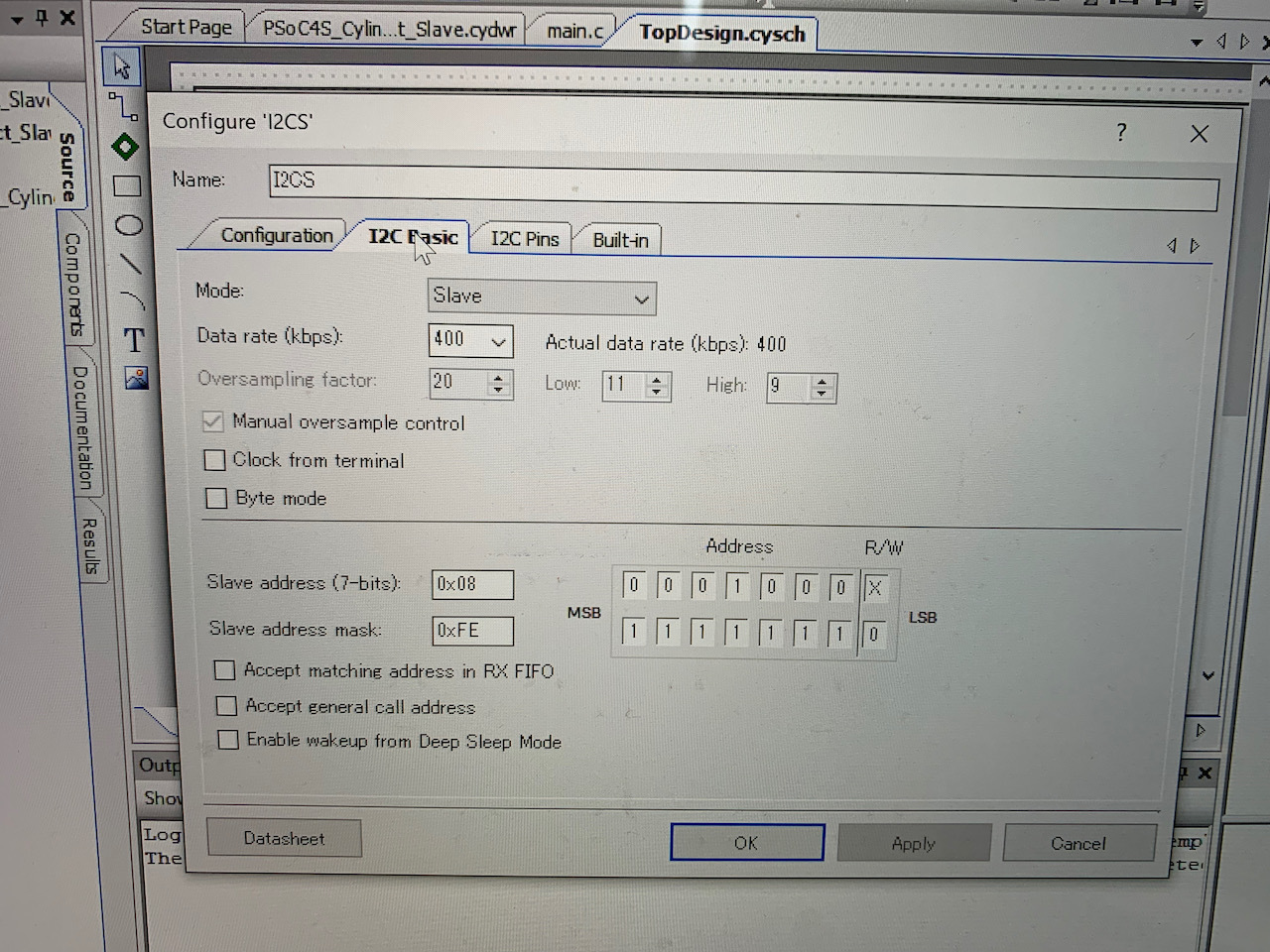
I2CS : enable
EZI2C : disable
なお、I2CSをダブルクリックしてI2C Basicタブの Slave Address を、0x08, 0x09, 0x0A に変えることで、Slave 1-3 を切り替える。
main.c で、
BOARD_TYPE を SUB_BOARD にして、clean->build
CapSensorのTuner
タッチセンサの感度の様子を見たい場合、Tunerを使って調べる。
TopDesignで、
UART : enable
I2CM : disable
I2CS : disable
EZI2C : enable
main.c で、
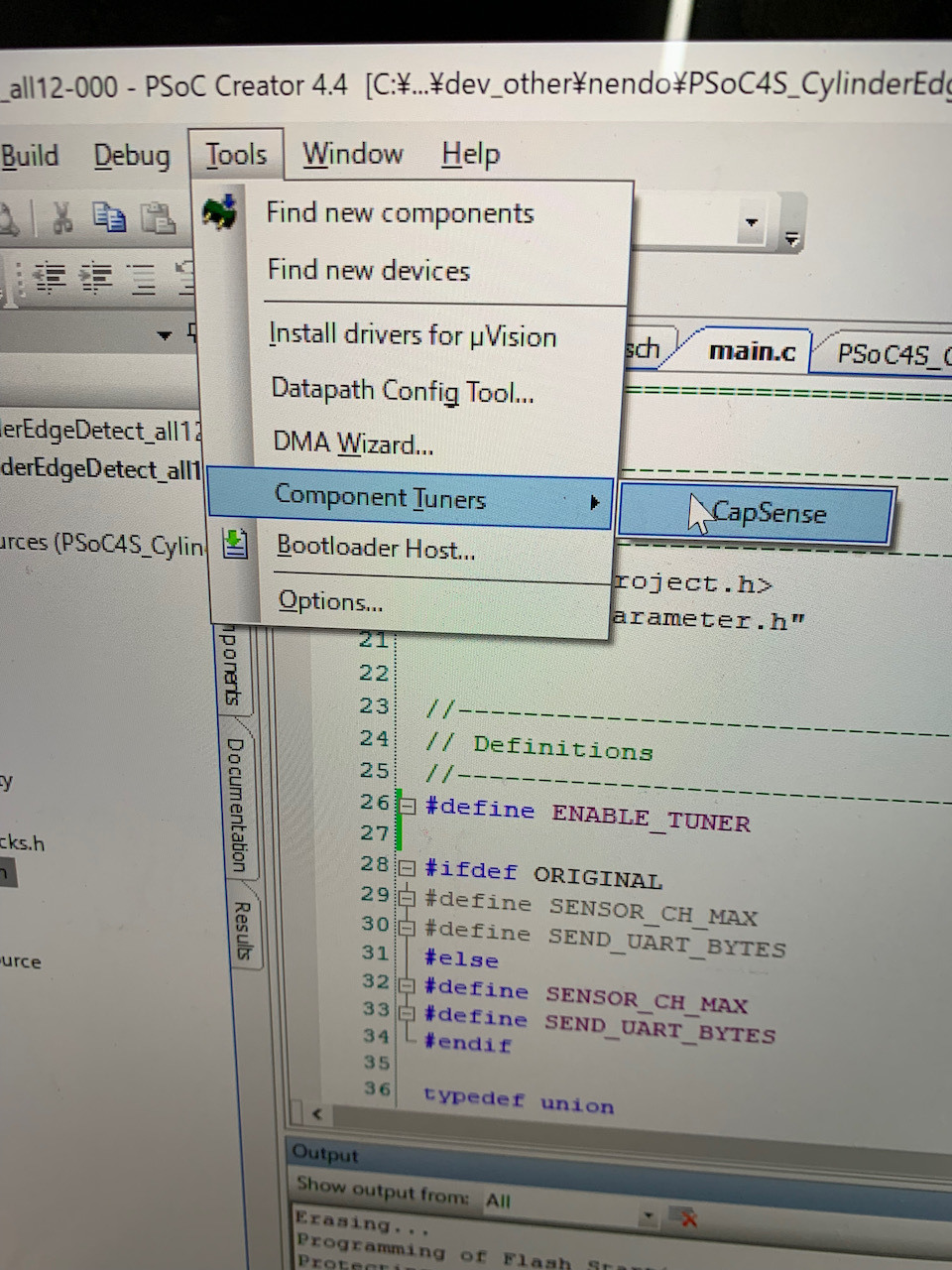
BOARD_TYPE を TUNER にして、clean->build
Tunerは、Toolsメニューから Component Tuners -> CapSense から起動。
感度調整
Finger capacitanceの値を変更
SmartSense (Full Auto-Tune) mode – 0.1 pF to 1 pF with a 0.02-pF step. なので、この値の範囲で感度を調整してみる。 値が小さいほど、感度が高くなる。
以下は昔の内容です。
サブ基板の準備とメイン基板との合体(旧)
72mm×47mmのユニバーサル基板からサブ基板作成。メイン基板と合体させる。
サブ基板のカット
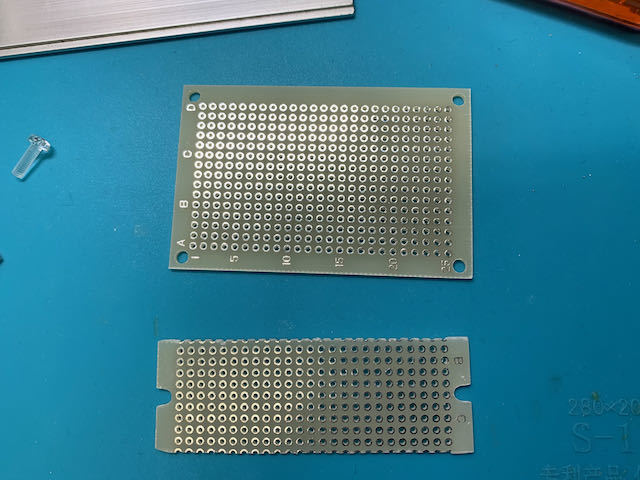
長辺側を切り取り、幅が25mm程度になるようにする。上の基板の場合、穴三つ目あたりに切り込みを入れて基板を割る。
また、短い辺の真ん中あたりに、ねじ止め用の切り込みを入れる。ネジ穴は70mmの距離なので、基板は穴ではなく、U字型の切り込みとなる。
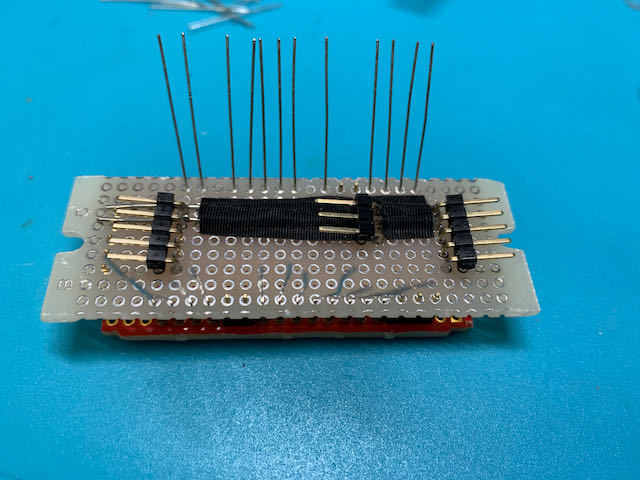
ピンヘッダのハンダ付け
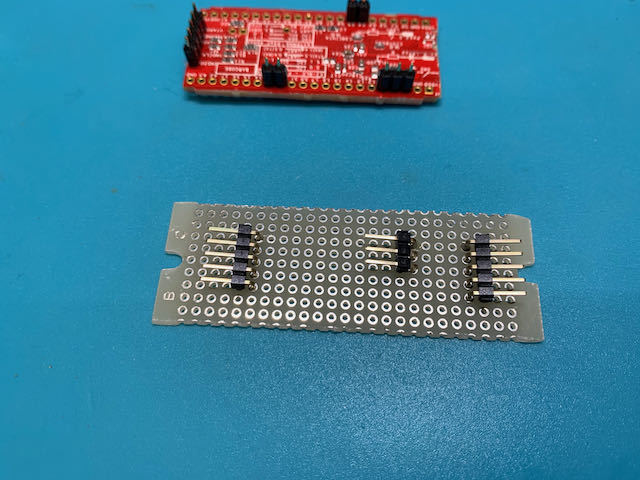
上のような位置に5pin、3pin、4pin(写真では5pin)の横向きのピンヘッダをハンダ付けする。
ただし、基板側の足をだいぶ浮かせ、横向きのピンは出来るだけ基板と距離を取るようにする。
横の配線図に示したとおり、三つのピンヘッダに対してVDDとGNDの配線を行う。その後、配線を絶縁テープで隠す。
メイン基板と合体
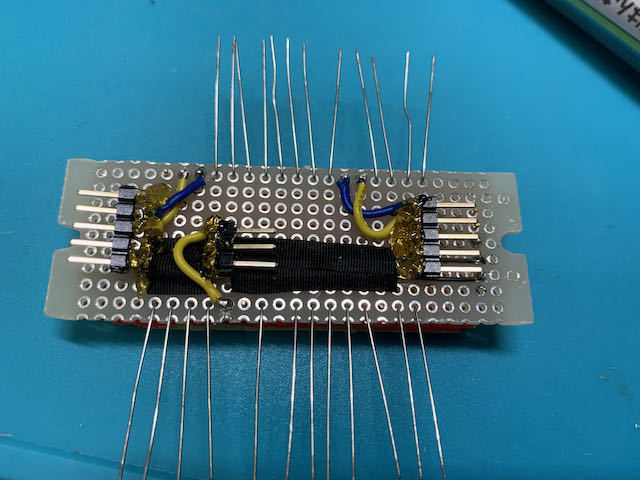
メイン基板の抵抗の足をうまくサブ基板の穴に通して合体する。
上の配線図の通りに、書き込み端子のSWDCLK, SWDIO, Tx, IC2SCL I2CSDA を配線する。
プログラムの書き込み
書き込み用ピンヘッダと切り取った書き込み用基板を繋げ、また静電センサの動作確認用にI2CのSCL/SDAも接続。
PSoC CreatorをPCで立ち上げて、プログラムを書き込む。特製ケーブル作成
4つの
基板とサポータを組み立て(旧)
基板とサポータを組み合わせ、センサーにハンダ付けしたポリウレタン線を基板にハンダ付けする。
基板をサポータにねじ止めする
写真のようにサブ基板の切り込みの位置にネジとワッシャーとナットを用いて、サポータとねじ止めを行う。
ポリウレタン線を基板にハンダ付け
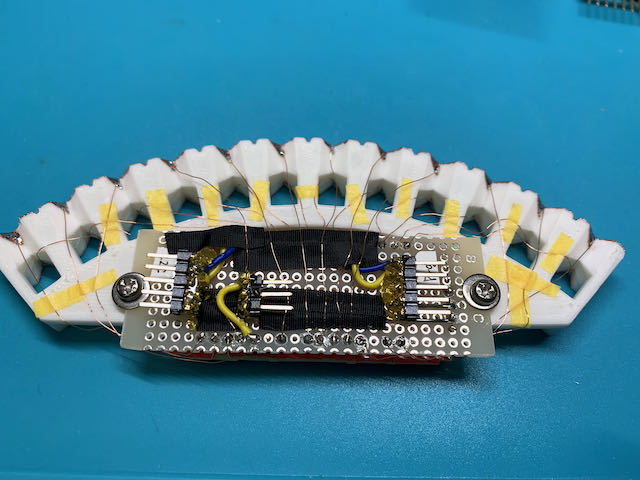
センサーにハンダ付けされているポリウレタン線を、今度は、基板側にハンダ付けする。
回路通りに、合計24箇所行う。
センサーの出来上がり
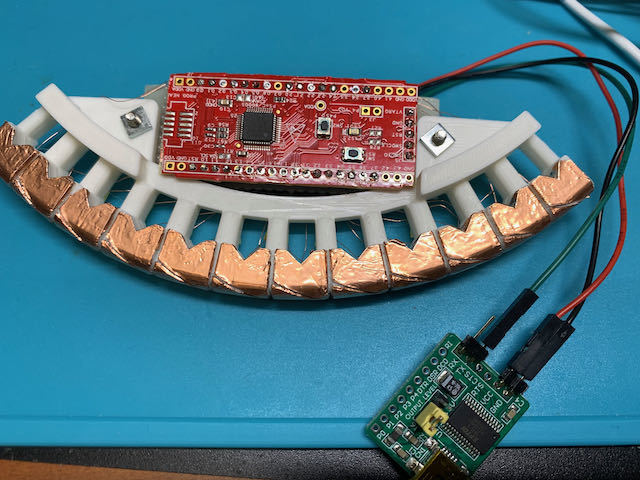
これでセンサーが一つ出来上がり。USBシリアルの基板を取り付け、動作確認をしよう!
このセンサーを4つ繋げることで円周全体のセンシングをカバーする。