Materials
これらメインとなるパーツ+3Dプリントまたはアクリル板を用いて作るアタッチメントパーツによって構成されます。
- Arduino
- サーボモータ
- ボタン(モーメンタリ押しボタンスイッチ)
- 手(3Dプリントしたもの)
- ベル

ボタン(モーメンタリ押しボタンスイッチ)

ベル

ダイソーで108円で買ったものを使っています。
Tools
プログラム
- Arduino IDE
- Zortrax m200
レーザーカッター
- Trotec speedy300
Making
全体のおおまかな流れ
- テキトーな棒でベルを鳴らす、プロトタイプを作る
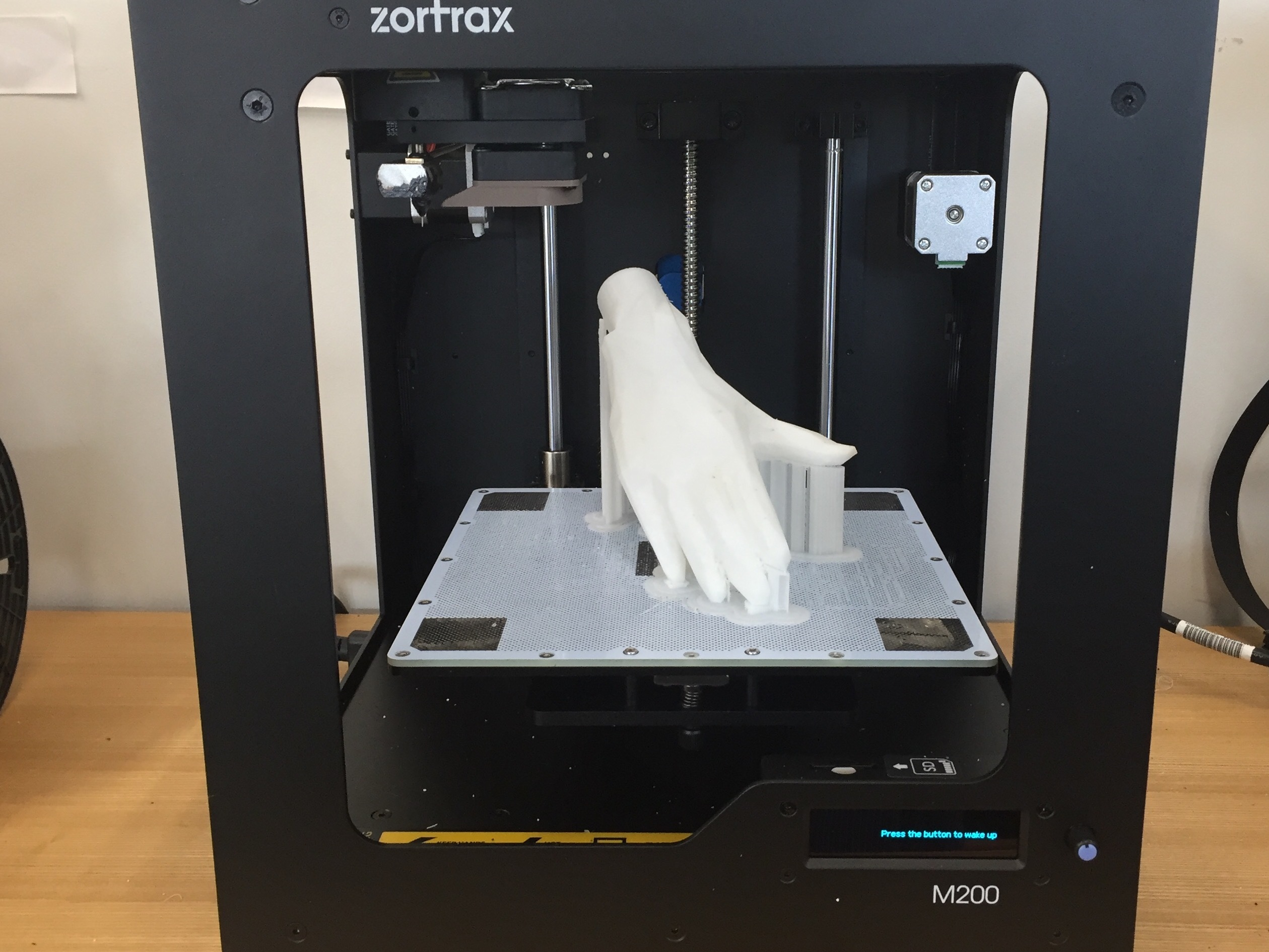
- テキトーな棒の代わりに手を3Dプリントして取り付ける
- アタッチメントパーツを作って取り付ける
テキトーな棒でベルを鳴らす、プロトタイプを作る
Arduinoの基本的な使い方は別途参照してください。
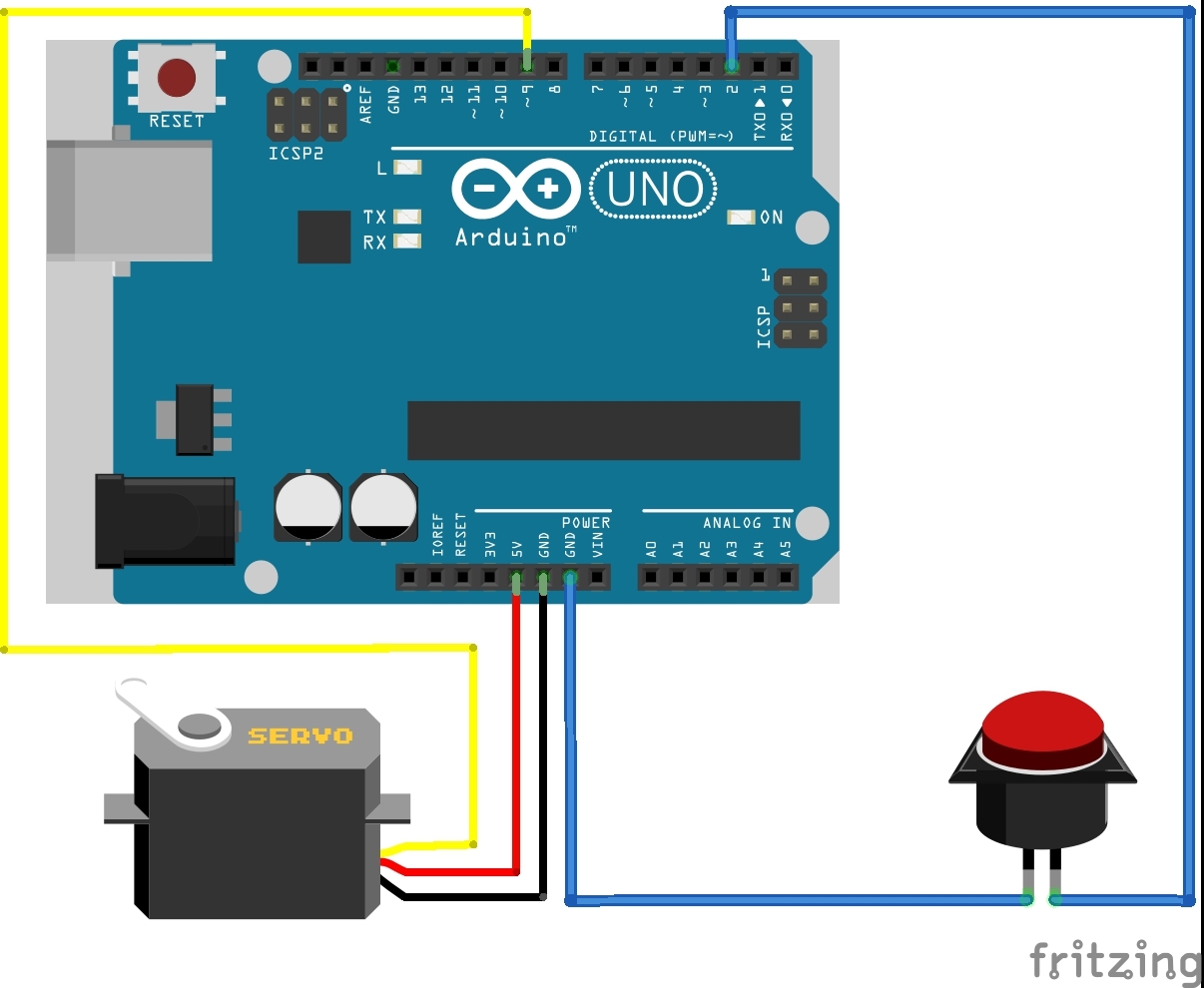
- 図のようにArduinoのピンにサーボモータ、ボタンをつけます。
- プログラム(HandyHandTimer.ino)をArduinoに書き込みます。
- 電源はPCのUSB端子or単3電池×4本(6V)から取り、ボタンを押すと3秒後にサーボモータが動いたら動作確認はおわりです。
- 最後にベルを押すためにサーボモータにテキトーな棒を取り付けたら、プロトタイプの完成です。
アタッチメントパーツを作って取り付ける
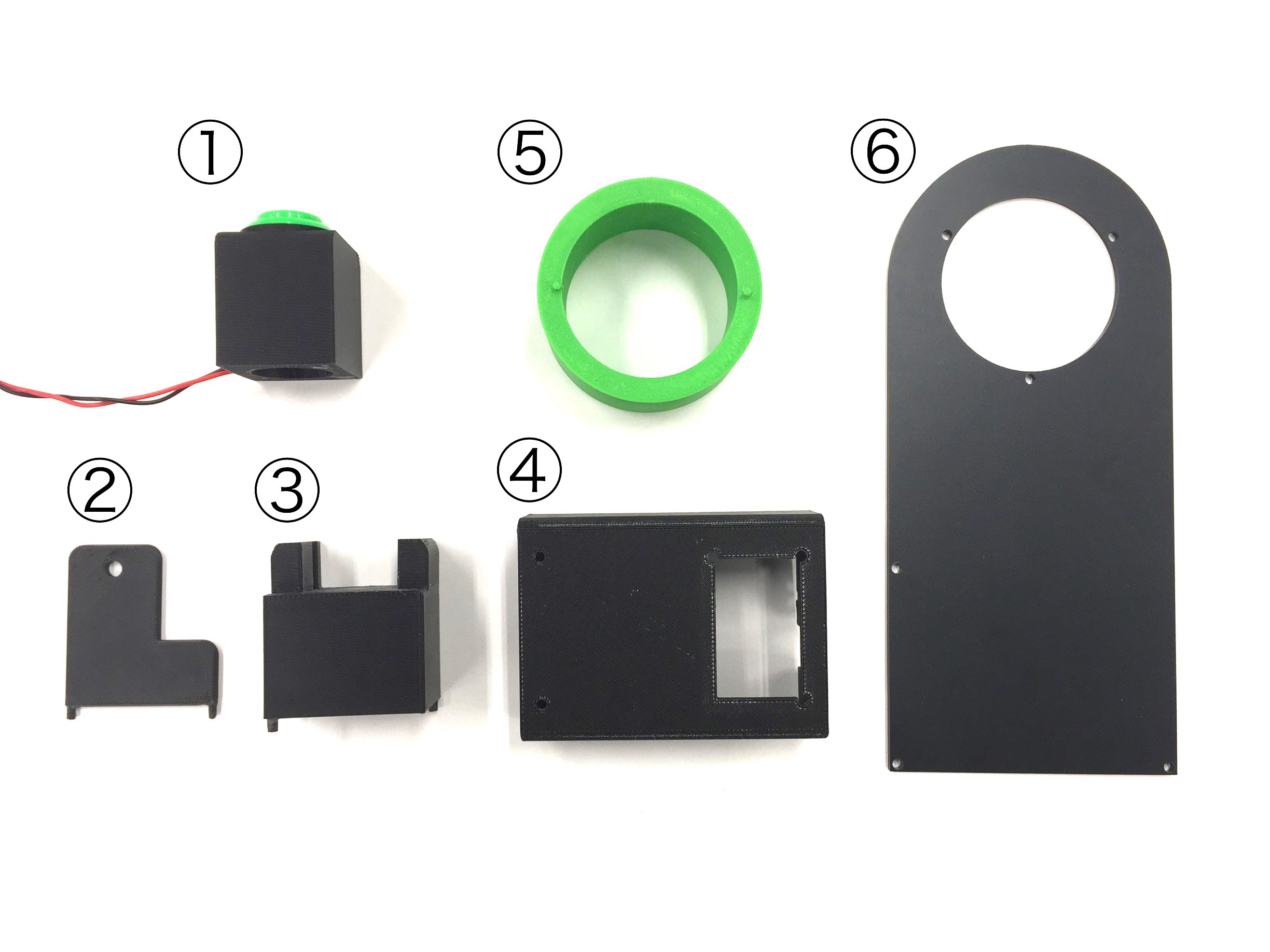
①〜⑤までのアタッチメントパーツを3Dプリンタで出力します。⑥のパーツは3mm厚のアクリル板をレーザーカッターで加工して切り出します。
- スイッチをはめこむパーツ(attachment_1.stl)
- 手を支えるパーツ(attachment_2.stl)
- サーボモータをはめこむパーツ(attachment_3.stl)
- Arduinoを格納するパーツ(attachment_4.stl)
- ベルをのせるパーツ(attachment_5.stl)
- 手とベルの位置を固定するパーツ(attachment_6.pdf)
完成

完成!
Option
入力ディスプレイを付ける
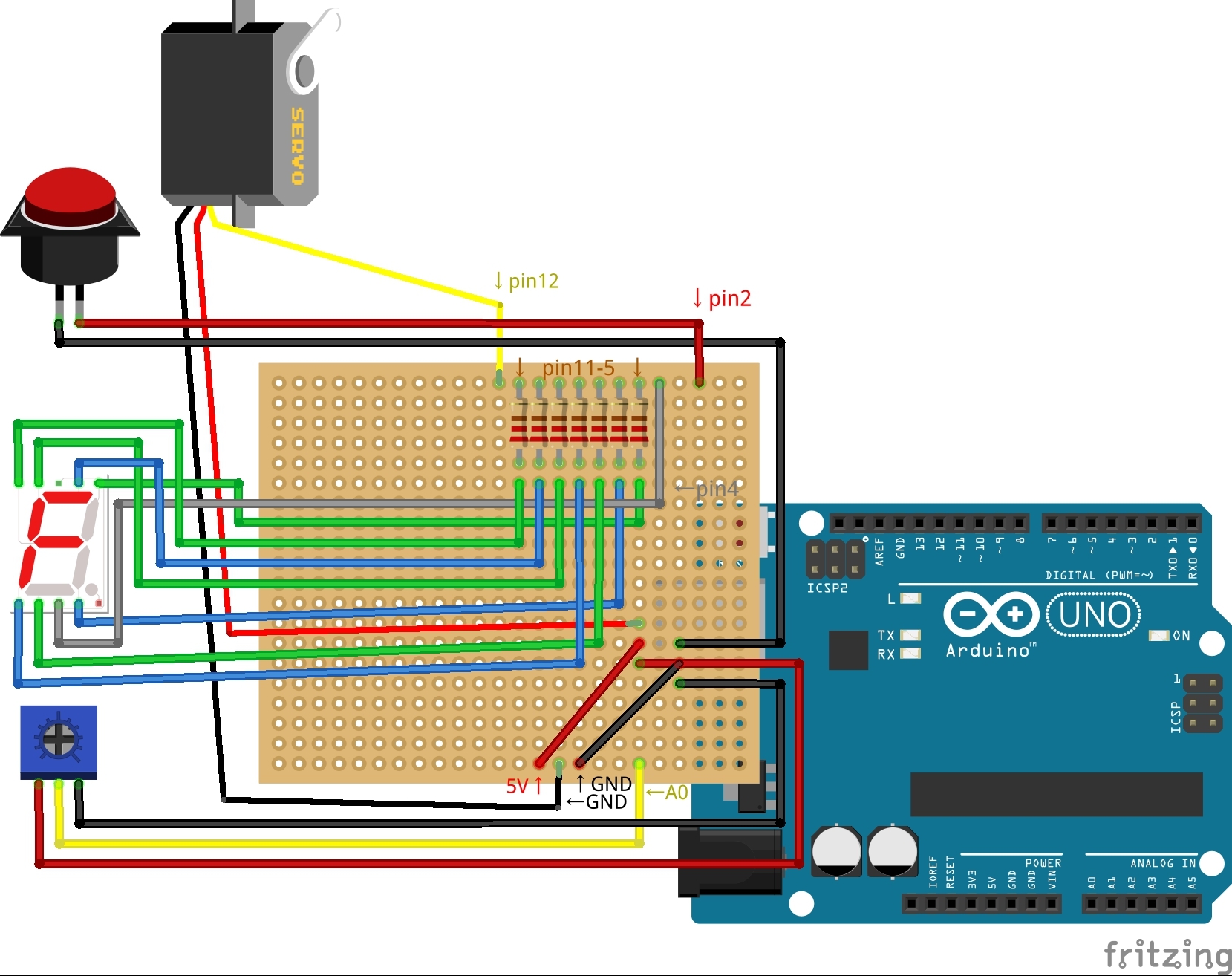

- 図のようにブレッドボードとArduinoのピンにサーボモータ、ボタンに加えて可変抵抗と7セグメントLED(7セグ)をつけます。
- 可変抵抗のつまみをひねって設定時間を決められるプログラム(HandyHandTimer_7seg.ino)をArduinoに書き込みます。このプログラムでは7セグの数字に対応して0~9分の設定ができるようになっています。
- ボタンを押すと設定時間後にサーボモータが動いたら動作確認はおわりです。
- アタッチメントパーツ①と④は7セグ用のものを使ってください。(attachment_1_7seg.stl、attachment_4_7seg.stl)
- 組み立てたら完成です!
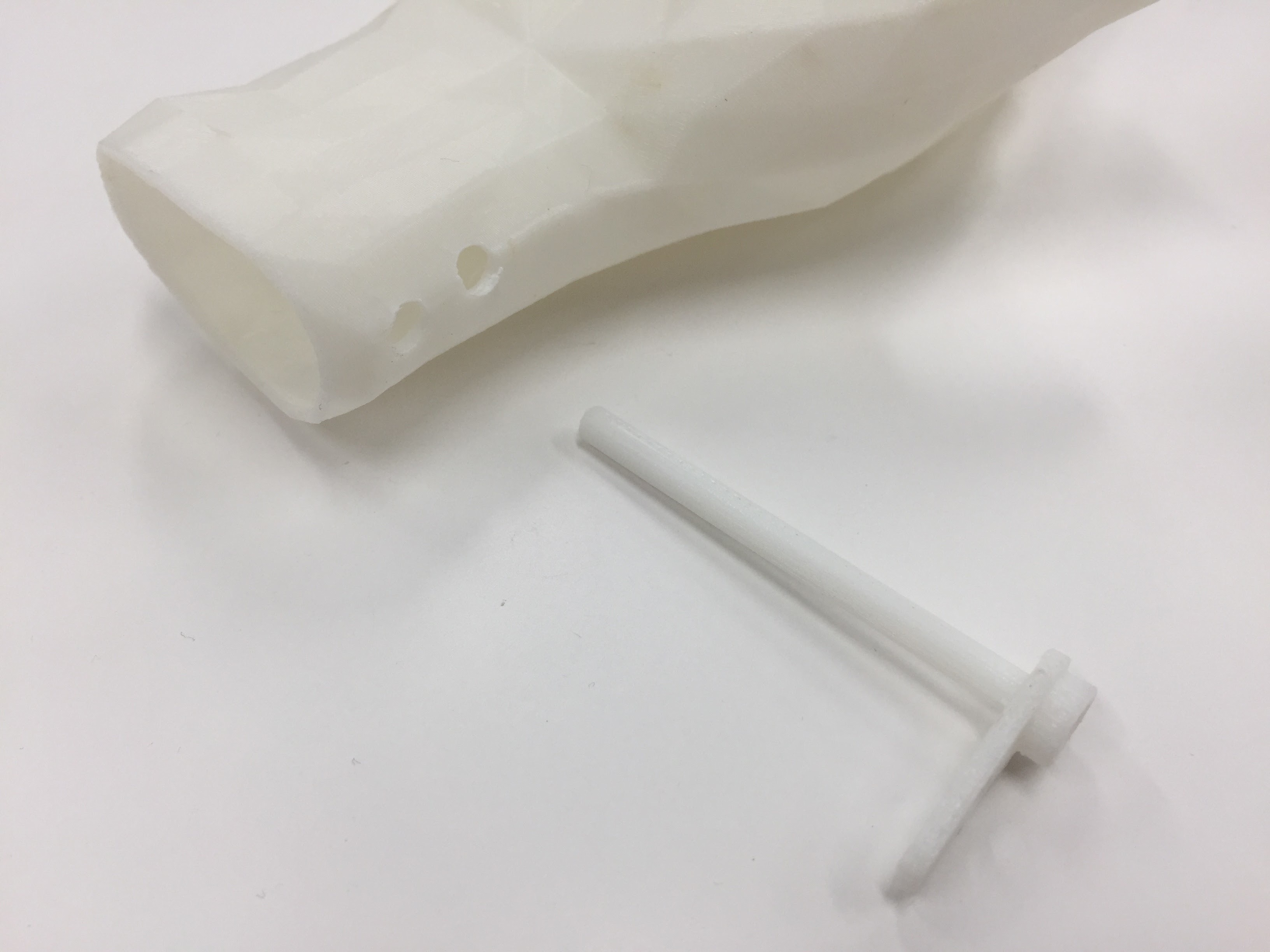
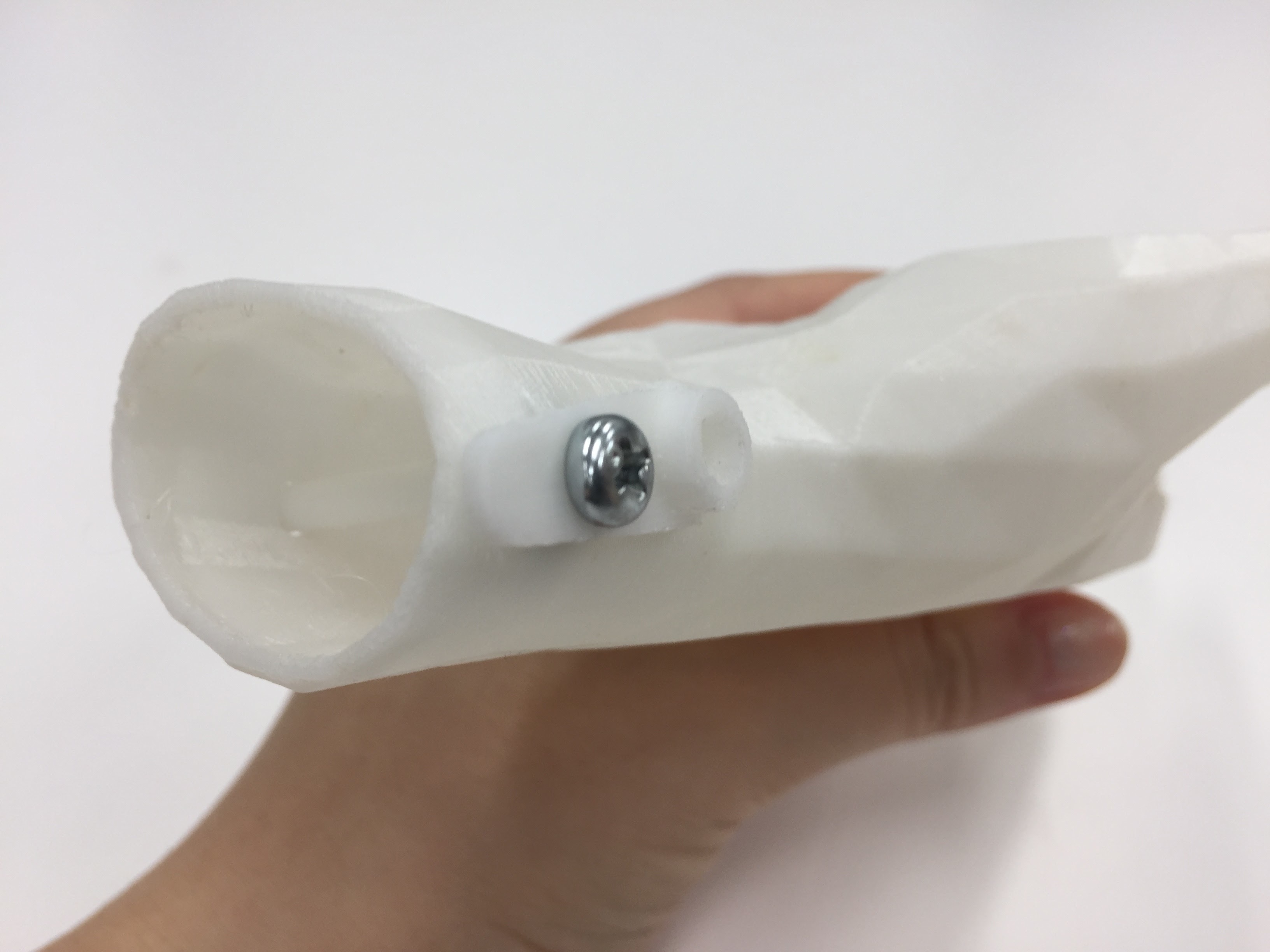
自分の手の3Dモデルを使う

- 3Dスキャナーを使って自分の手の3Dモデルを作ります。(自分の手を自分でスキャンするのは難しいので誰かに手伝ってもらう必要があります)
- モデルを修正・編集したあとモーターに取り付けられるように直径4mmの穴を親指側に1cm間隔で2つ、そのうち1つは小指側まで貫通するように穴を開けます。