必要なもの
今回は「ウェットティッシュを取り出す際,汚れた手で箱に触れなくてはならない」という問題に着目し,これをできるだけシンプルに解決しようと試みました.
多くの方がこの問題を解決できるよう,安価で入手性の高い材料,整えやすい環境を意識して開発を進めていきました.
材料
必要な材料,機器は以下のようになっています.
いずれも通販や百円ショップで売られている,入手性の高いものになっています.
2.Arduino UNO
3.サーボモーター(SG90)
4.MESH(人感,ボタン,GPIO)
5.ウェットティッシュ(シルコット消毒ウェットティッシュ-詰め替え用)
開発環境
Fusion360
AUTODESK提供のCADソフトで,学生であれば無料で使用できます.
3Dプリンタ
造形範囲が200mm×200mm×200mmの物を使用しました.
Arduino IDE
Arduinoにプログラムを書き込むためのソフトウェアです.
MESH
IoTをより身近に感じることのできるファームウェアです.
設計
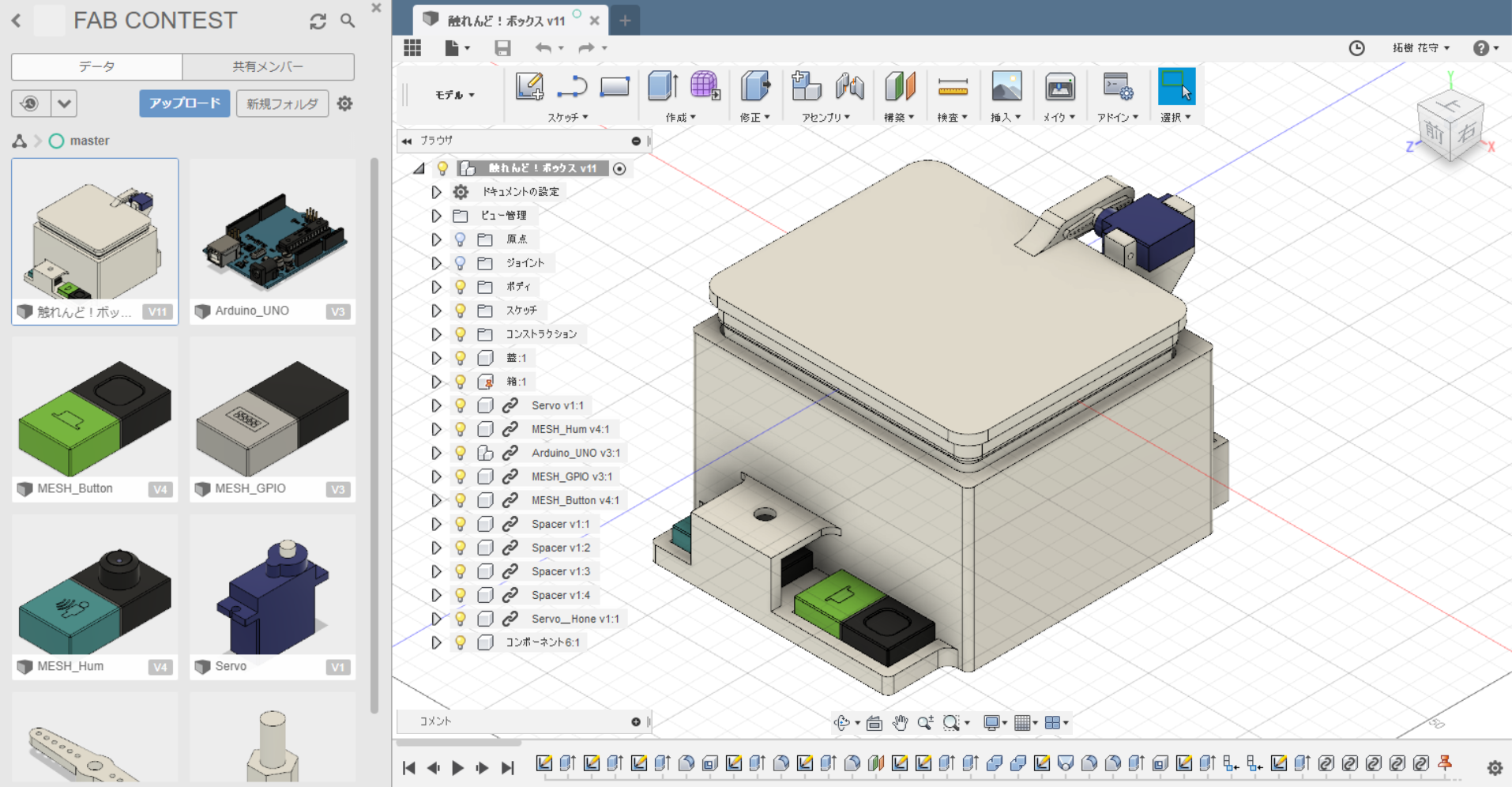
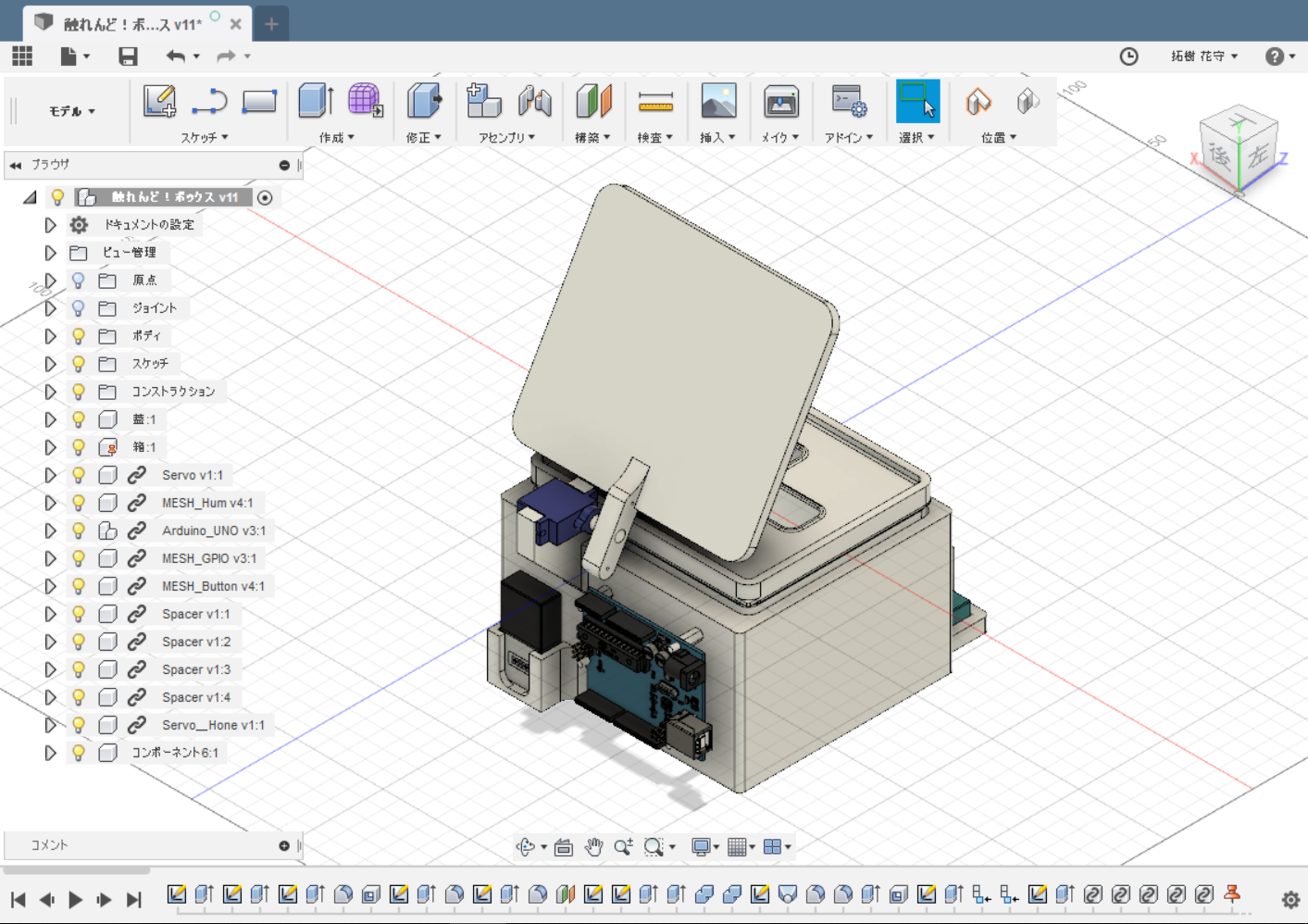
Fusion360を使用し,設計を進めていきます.MESHの各センサやArduino,サーボモータなどの既製品は仕様書などを参考に3Dデータを起こしていきます.出来上がった既製品のデータを適切な空間に配置していき,それらの間をつなぐようにフレームや蓋を作成していきます.
アセンブリで干渉なく動作することを確認し,3Dプリンタで出力する部品をSTL形式で保存し,設計は完了です.
部品加工
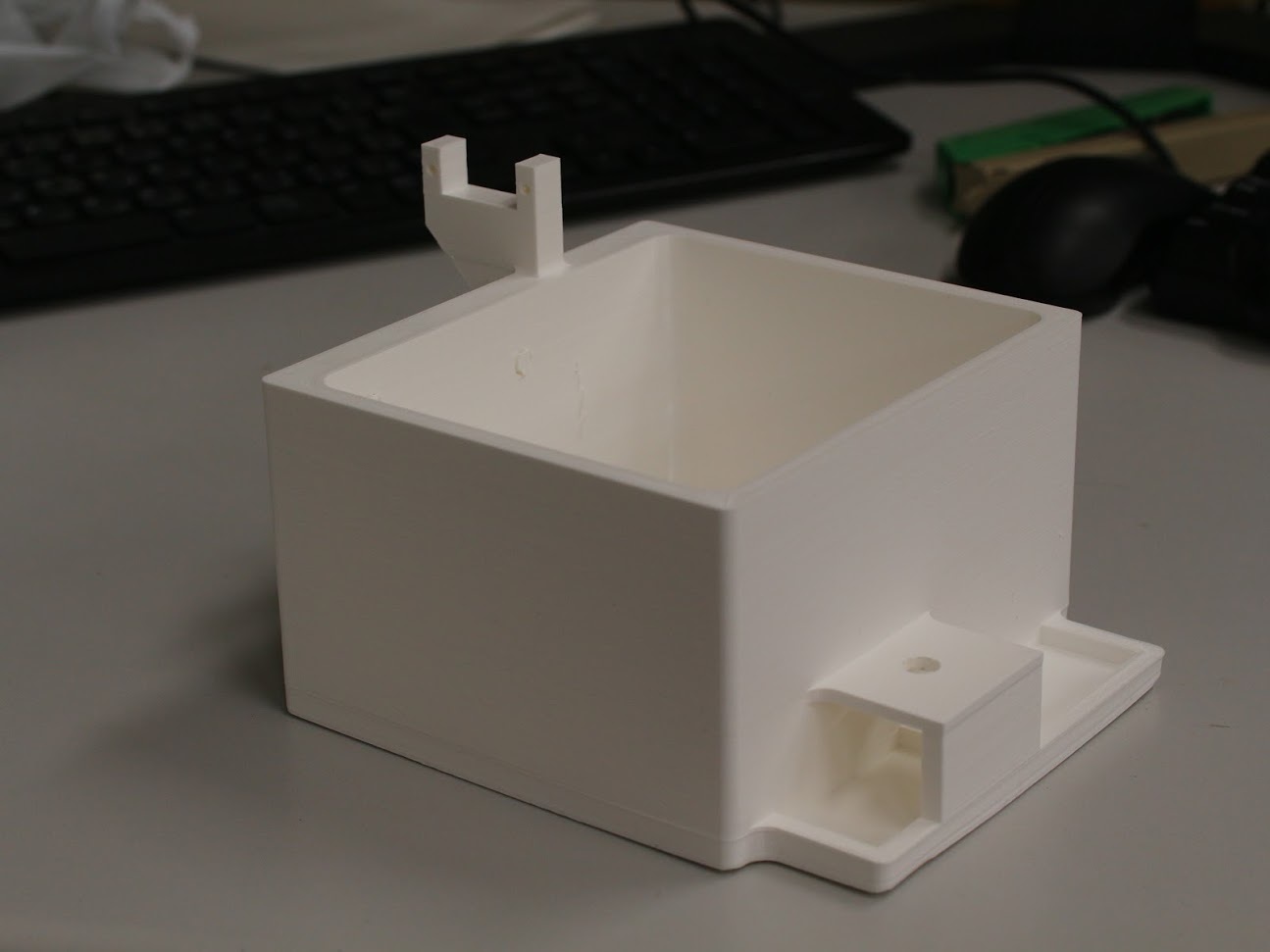



設計が完了した部品を3Dプリンタで出力し,追加工していきます.具体的に施した加工は,以下のようになっています.
1,3Dプリンタパーツのバリ取り,ヒートガンによる形状修正
2,3Dプリンタパーツへサーボホーンなどの部品を固定
3,箱の底に穴を開け,3Dプリンタパーツと固定
プログラム
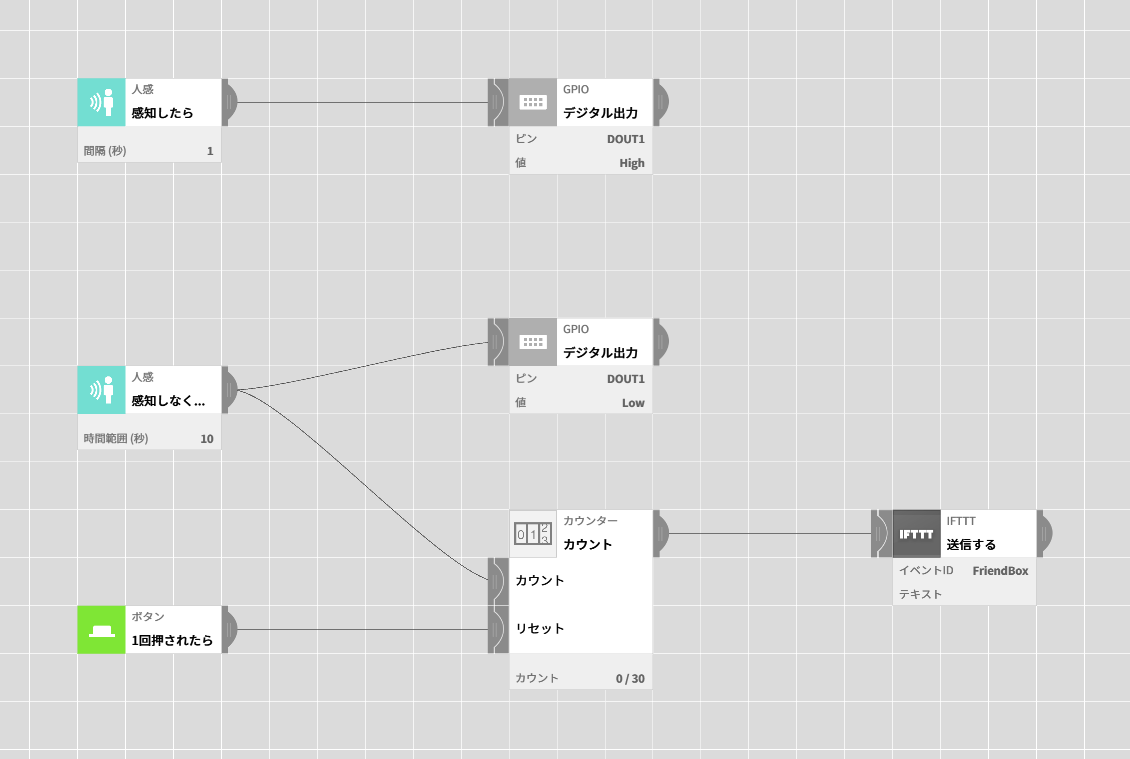

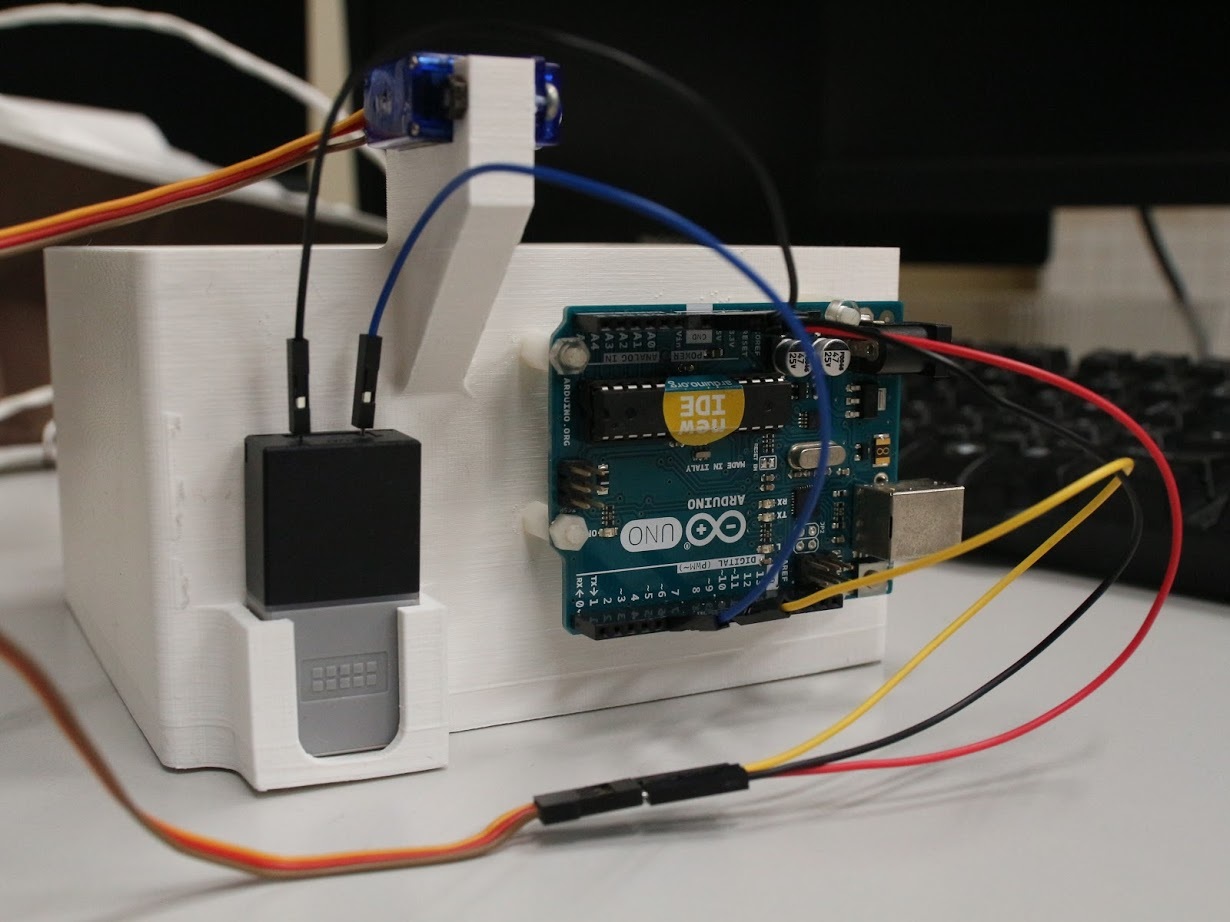
触れんど!ボックスはMESHとArduinoを併用したシステムによって動作しています.
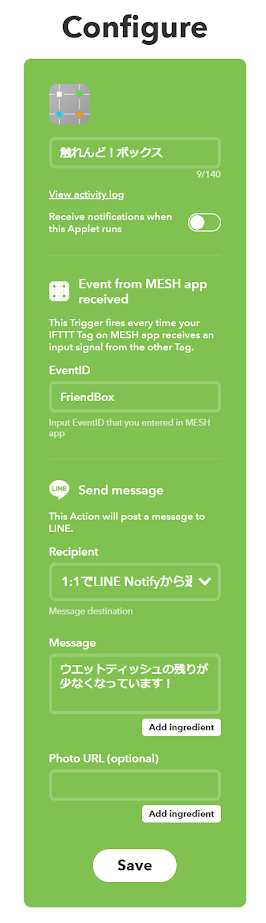
人感センサによって手を検出してGPIOから信号を送るまでをMESHで,信号を受けてサーボを動作させる部分をArduinoで制御しています.更にMESHとIFTTTを連携させ,開閉の回数をカウントして残量が少なくなった際にスマートフォンへと通知を送信するという処理も行っています.
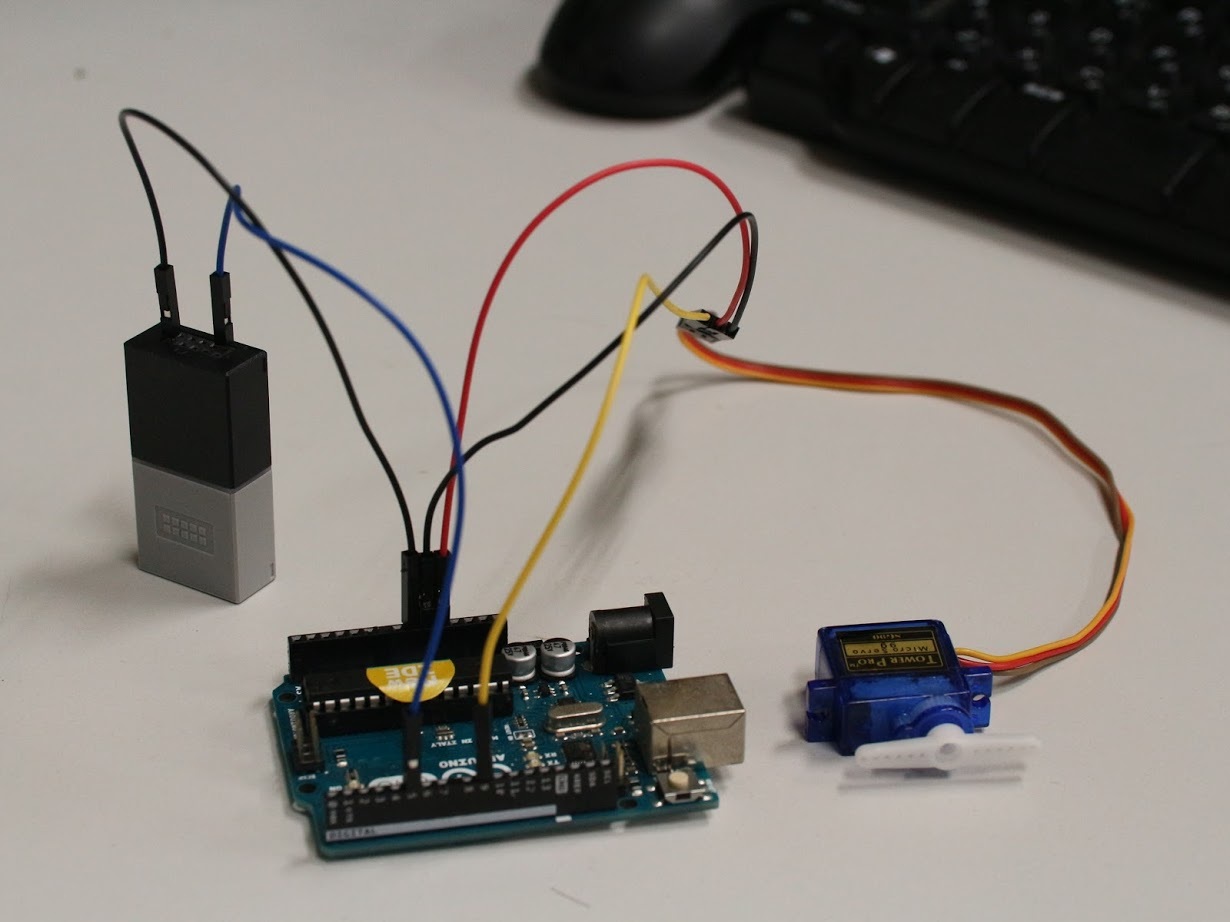
今回は回路を筐体に組み込む前に,上記の処理を正常に行えるかどうかの確認のため,動作試験を行いました.
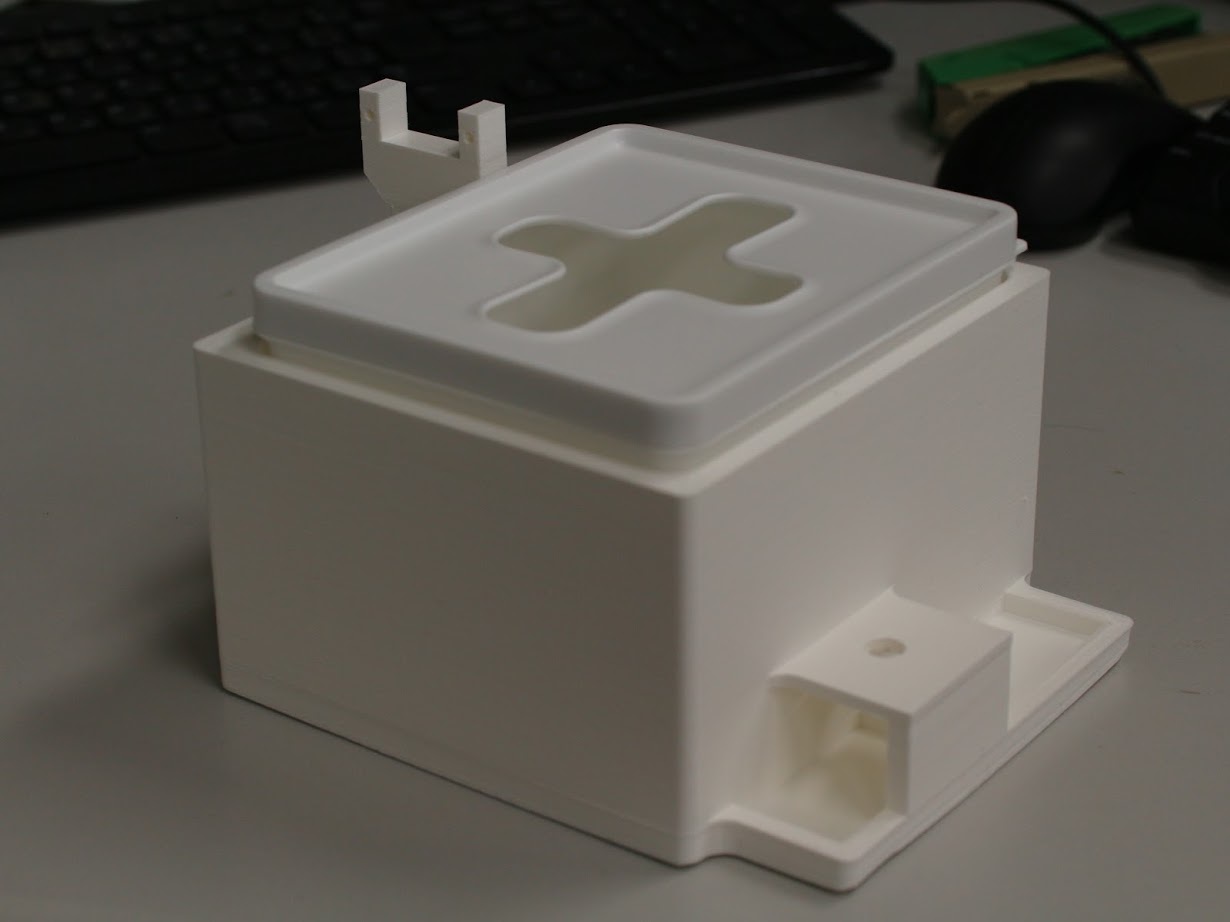
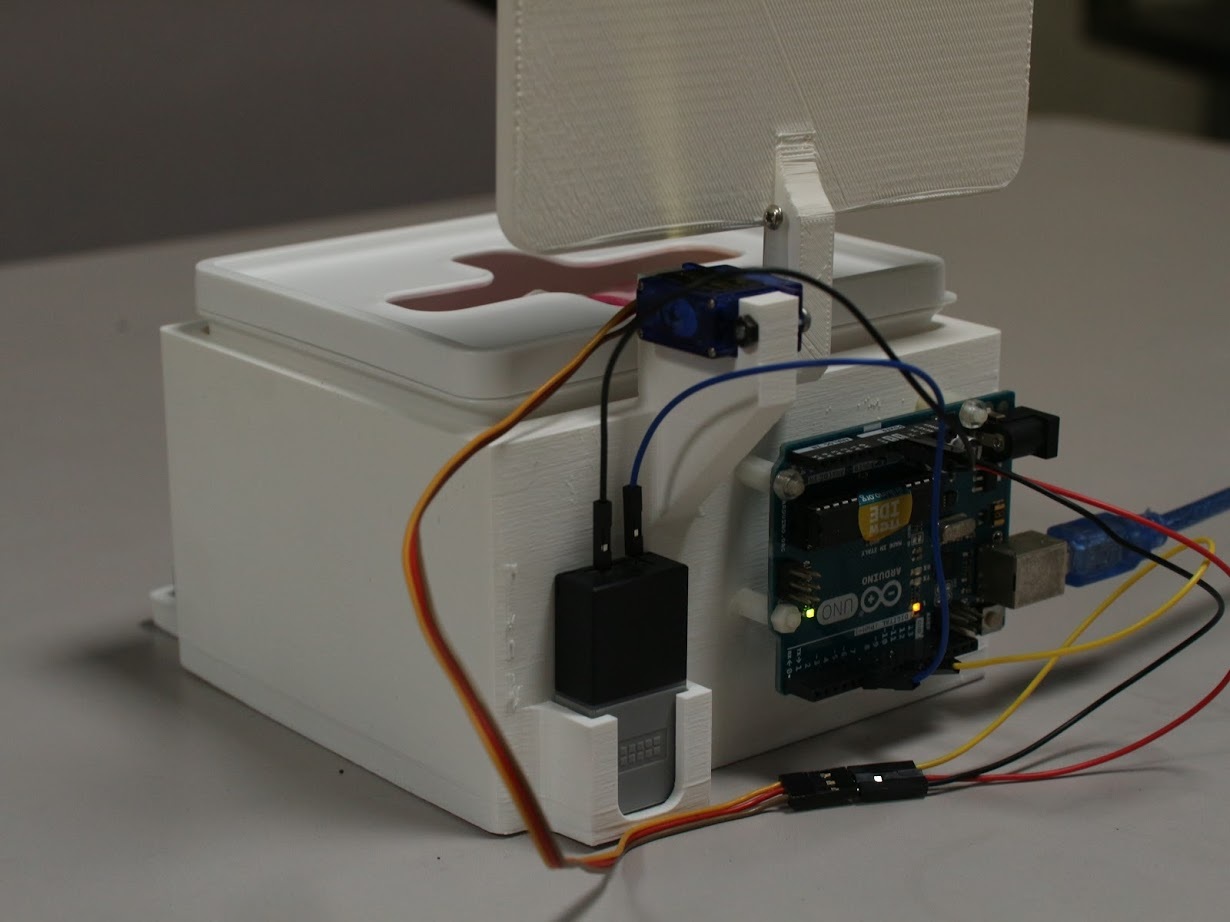
組み立て
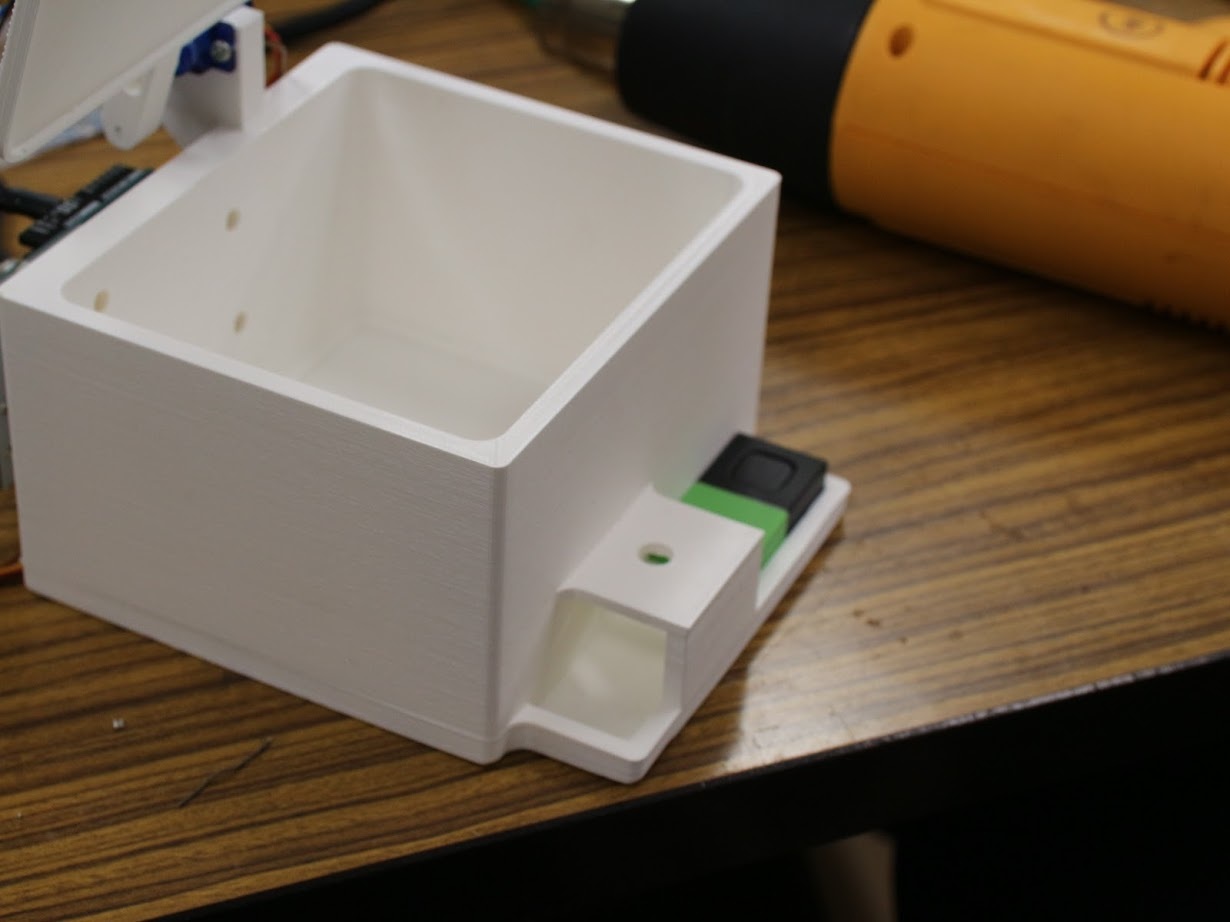
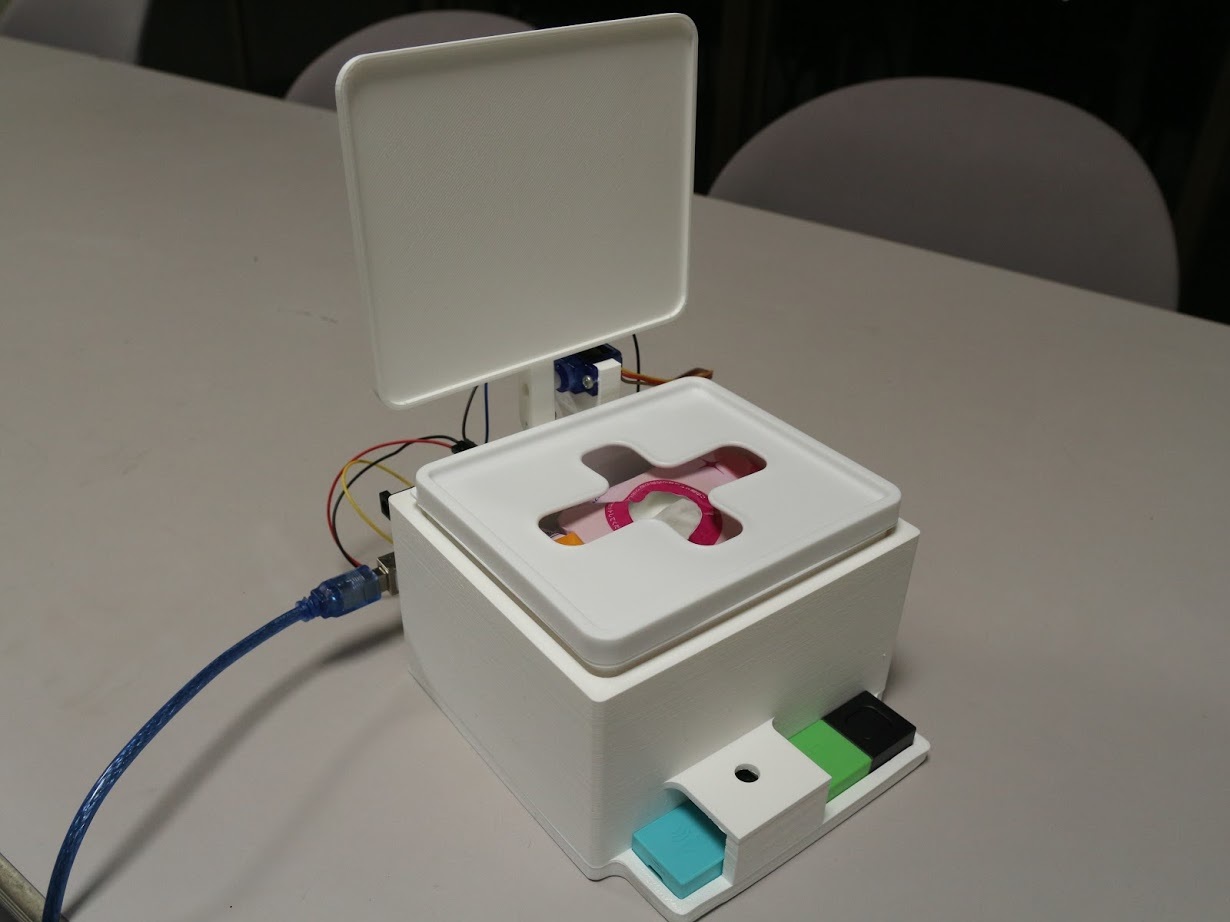
出来上がった筐体にMESHの人感センサ,ボタン,回路などを組み付けていきます.組み立てが完了したら,触れんど!ボックスの心臓部であるウェットティッシュを開封し,箱の中へ入れます.
動作確認
手をかざした際にしっかりと蓋が開き,ウェットティッシュを取るのに十分な時間をおいて蓋がぴったりと閉じることを確認します.
使用するウェットティッシュの詰め替えパックの種類によっては,本体を重くしないとウェットティッシュを取る際に移動してしまったり,枚数の違いで誤ったタイミングに通知がきてしまうこともありますので,注意しましょう.