マイコン部分を組み立てる
ロボットの動きを制御するためのマイコン部分を作る。
部品のハンダ付け
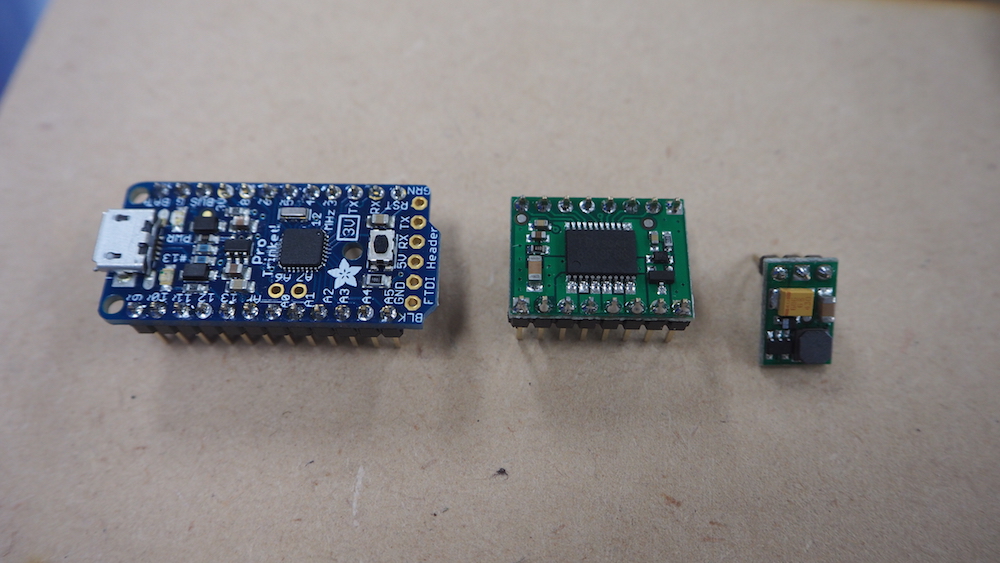
モーダ―ドライバ、レギュレータにピンヘッダをハンダ付けする。
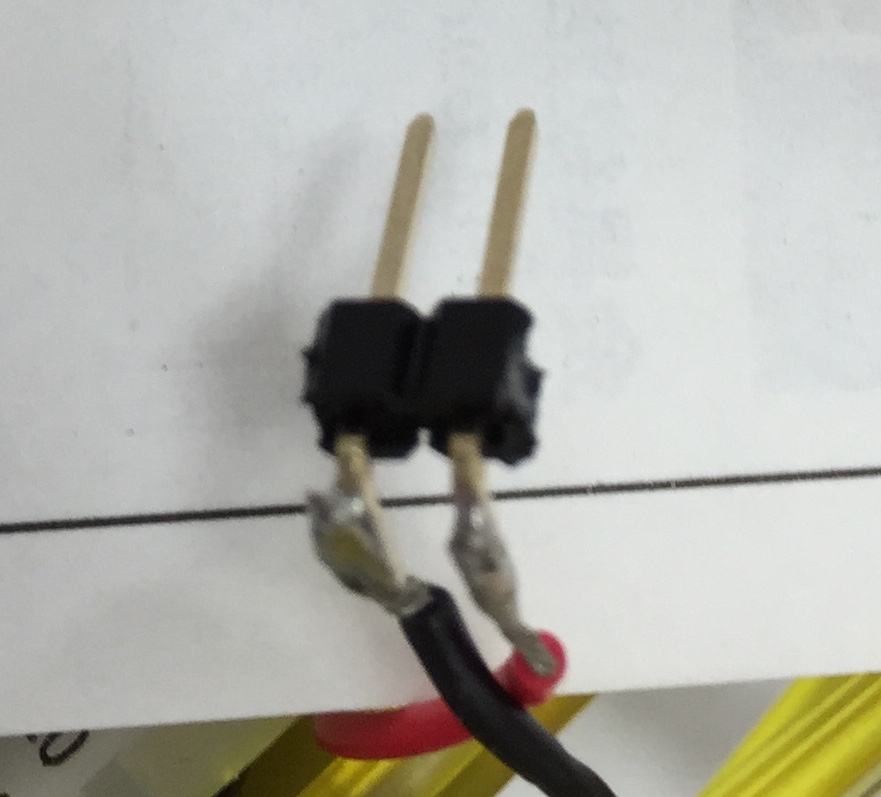
モータと電池ボックスのワイヤの先も、ピンヘッダ2本を付けておくとブレッドボードに刺しやすいのでつけておく。
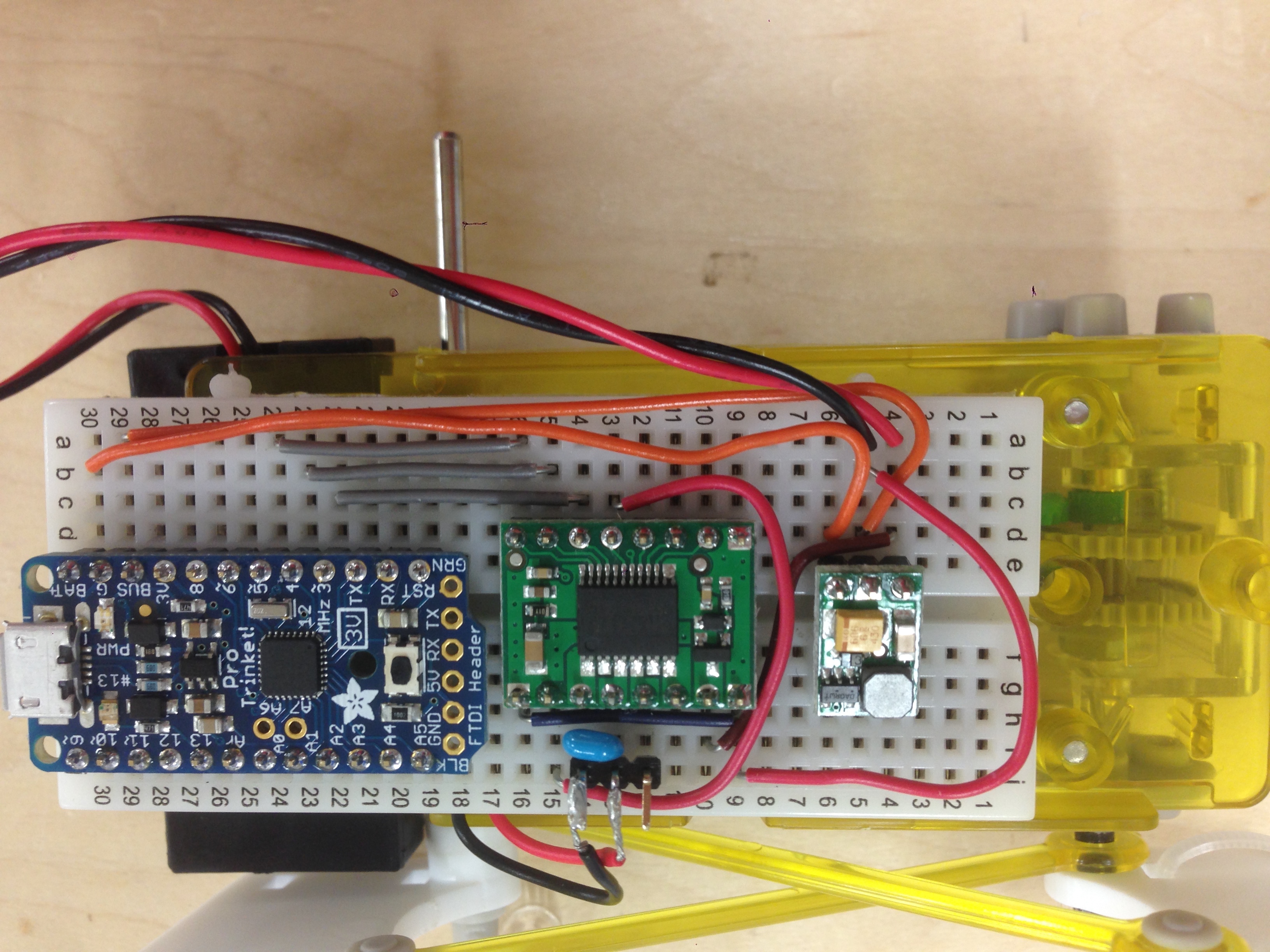
部品の配置
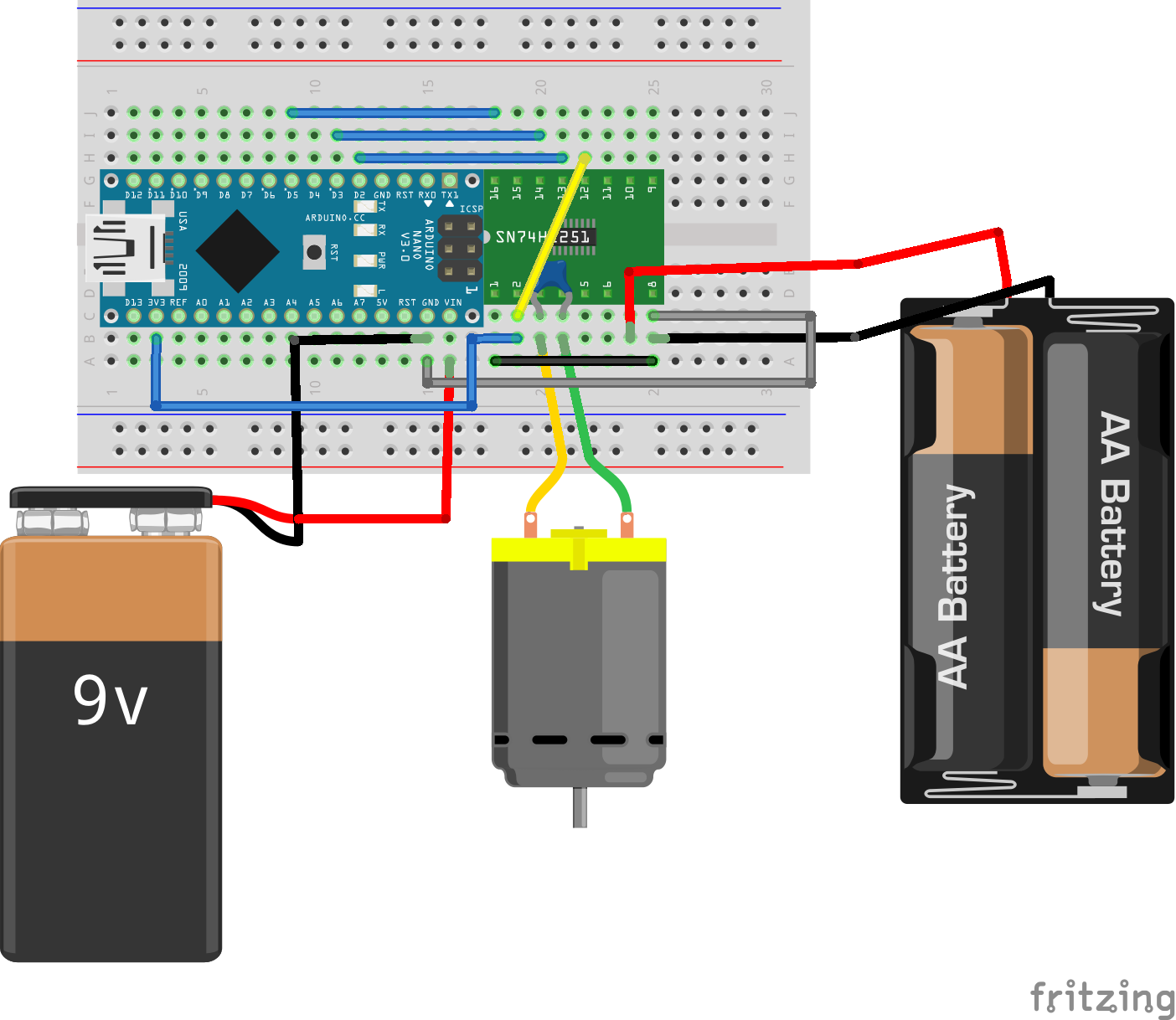
それぞれの部品を、回路図を参考に部品を配置する。(※向きに注意。前工程の写真や部品裏のピン名称を参照)
ブレッドボードは筺体のサイズに合わせるため、両端の二列は外しておく。
モータはギアボックスに取り付けられているので、後で配線する。
スピーカーと距離センサの配線
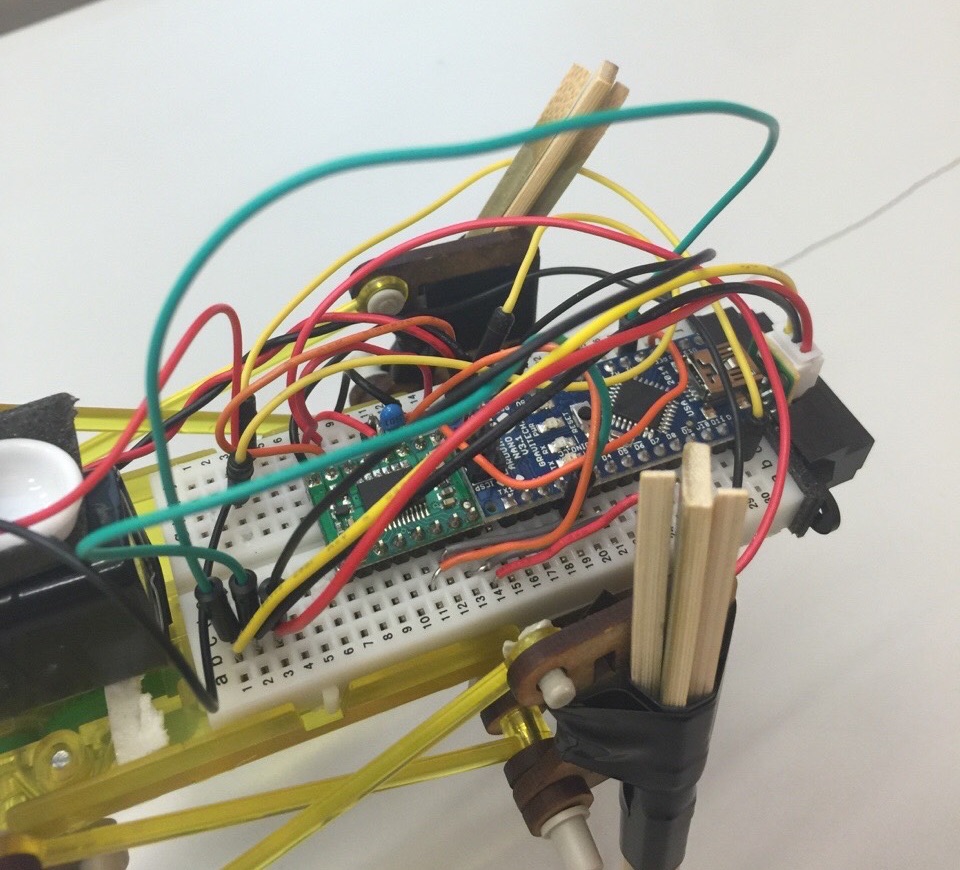
図のように配線する。
今回はブレッドボードのスペースに制限があったため、ごちゃごちゃした配線になっている。
スケッチのアップロード
配置したら下記のスケッチプログラムをArduinoにアップロードする。
書き込み方
・ArduinoIDEをダウンロード,インストール Arduino IDE
・IDEを開いたら、ツール->マイコンボードの中からArduino Nano w/Atmega328を選択
・シリアルポートを選択 tty... かcu...
スケッチプログラム
スケッチプログラムの中身
1.前方の対象物との距離が400未満の場合(前進/スピード200)・ if(sensorValue < 400 )の400の部分を変更することで対象物とどれくらいの距離になるまで歩き続けるかが変更可能
・analogWrite(5, 200)の200の部分を変えることで歩く速度を変更可能
2.前方の対象物との距離が400より大きい場合(停止/警報音)
・ tone(SPEAKER,tone,BEATTIME) ; のtoneの部分を変えることで警報音の音程を変更可能 delay(BEATTIME) ;BEATTIMEの部分を変えることで一音の長さを変更可能

木の枝を脚につける
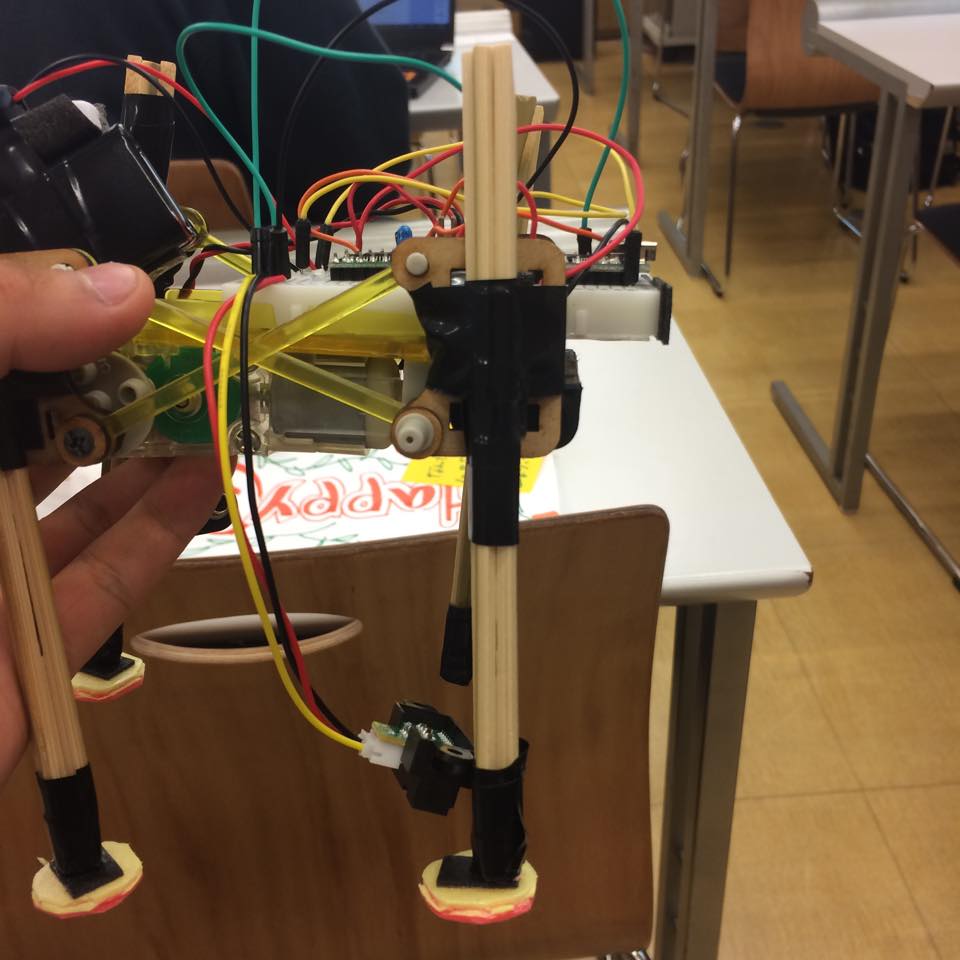
足用に用意した竹串を2本で1ペアとし、テープでとめる。
それをロボットに両面テープおよび普通のテープを使って左右前後にずれないように固定。
足元には、滑り止めおよび、足裏の面積を大きくするために、クッションボードを円形に切り取り、両面テープで接着。
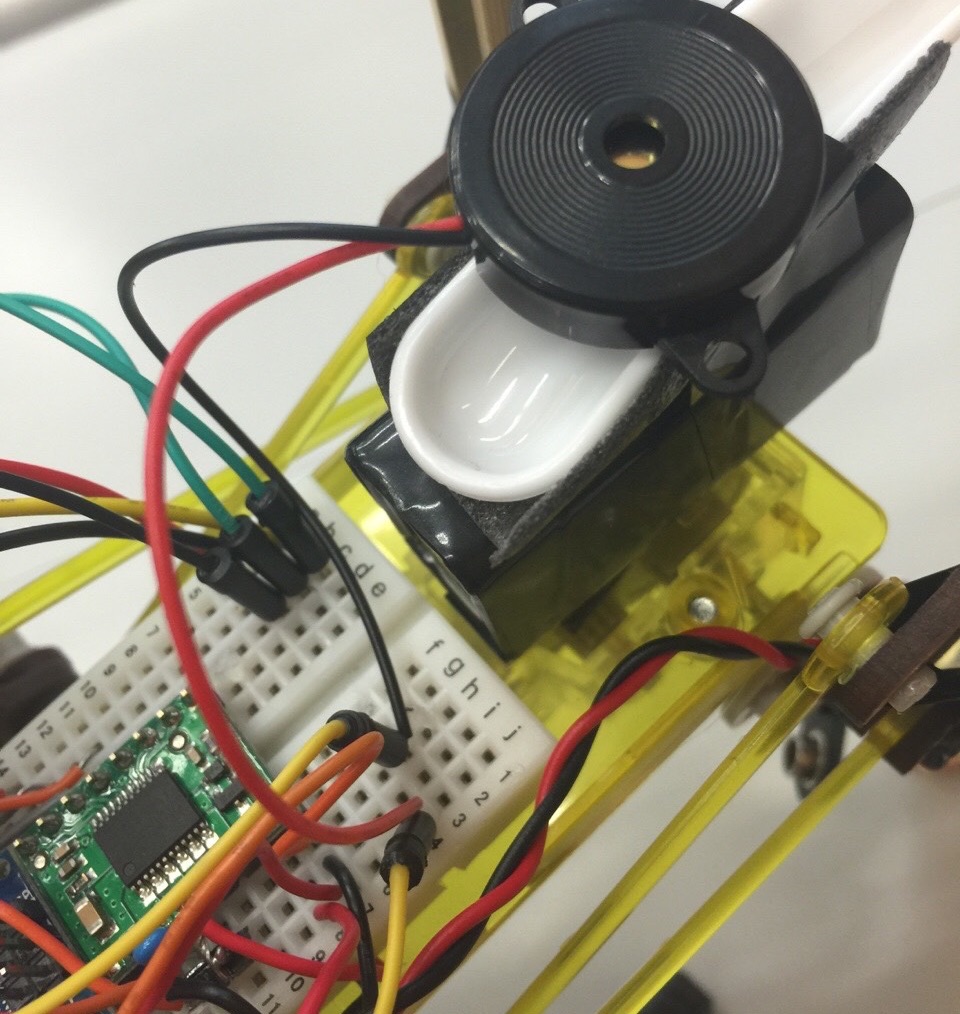
「れんげ」を取り付ける

一番重要である「れんげ」を取り付ける。
れんげは、お菓子を乗せるのに必要となるため、角度が水平になるように注意する。
センサーを取り付ける
距離センサー
前方に距離センサーを設置し、障害物となるものとの距離を測る。
スピーカー
障害物を検知した際に、音が出るスピーカーを搭載する。
完成
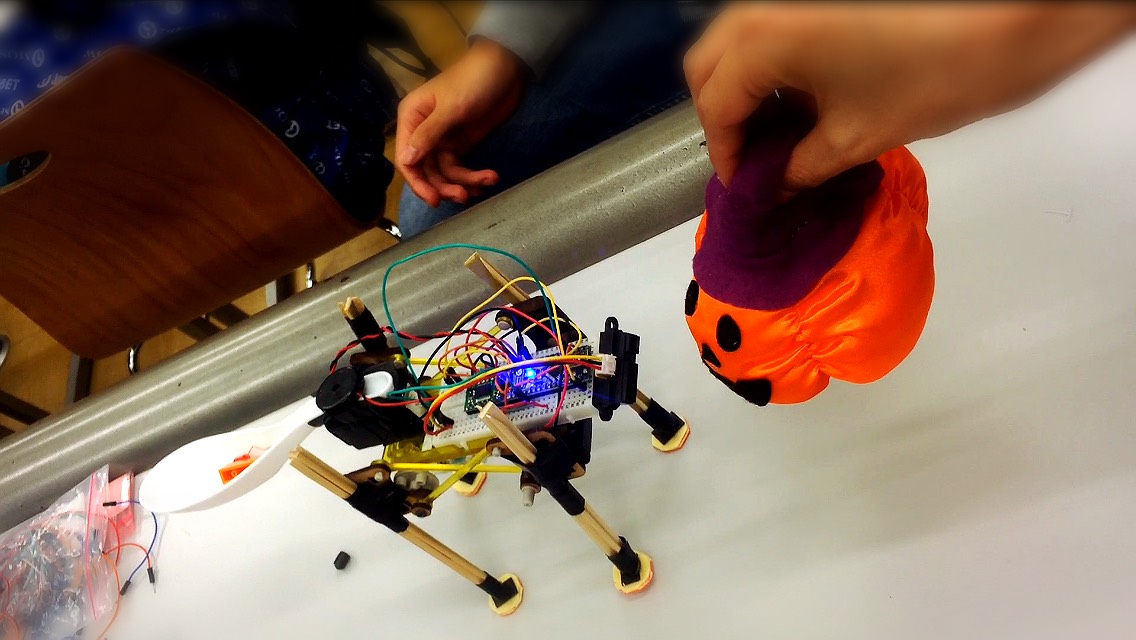
❤ハロウィンのお菓子をくれるロボット「れんげ」❤
product by なんでもぽけっと
かぼちゃ「お菓子ちょうだい❤」
れんげ「(止まる)(メロディ流れる)」
かぼちゃ「(お菓子もらう)ありがとう(^o^)」
使った機能:音センサー、距離センサー
再現動画
https://youtu.be/TzfA4NPnoT8
ハロウィンに使ってね❤

★こんな時★
「子どもたちにお菓子をあげたいけど、
お出かけしなきゃならない!」
「トリックオアトリートに付き合ってあげたいけど、
ずっとは疲れちゃうわ・・・」