機構部分
サーボホーンの取り付け調整
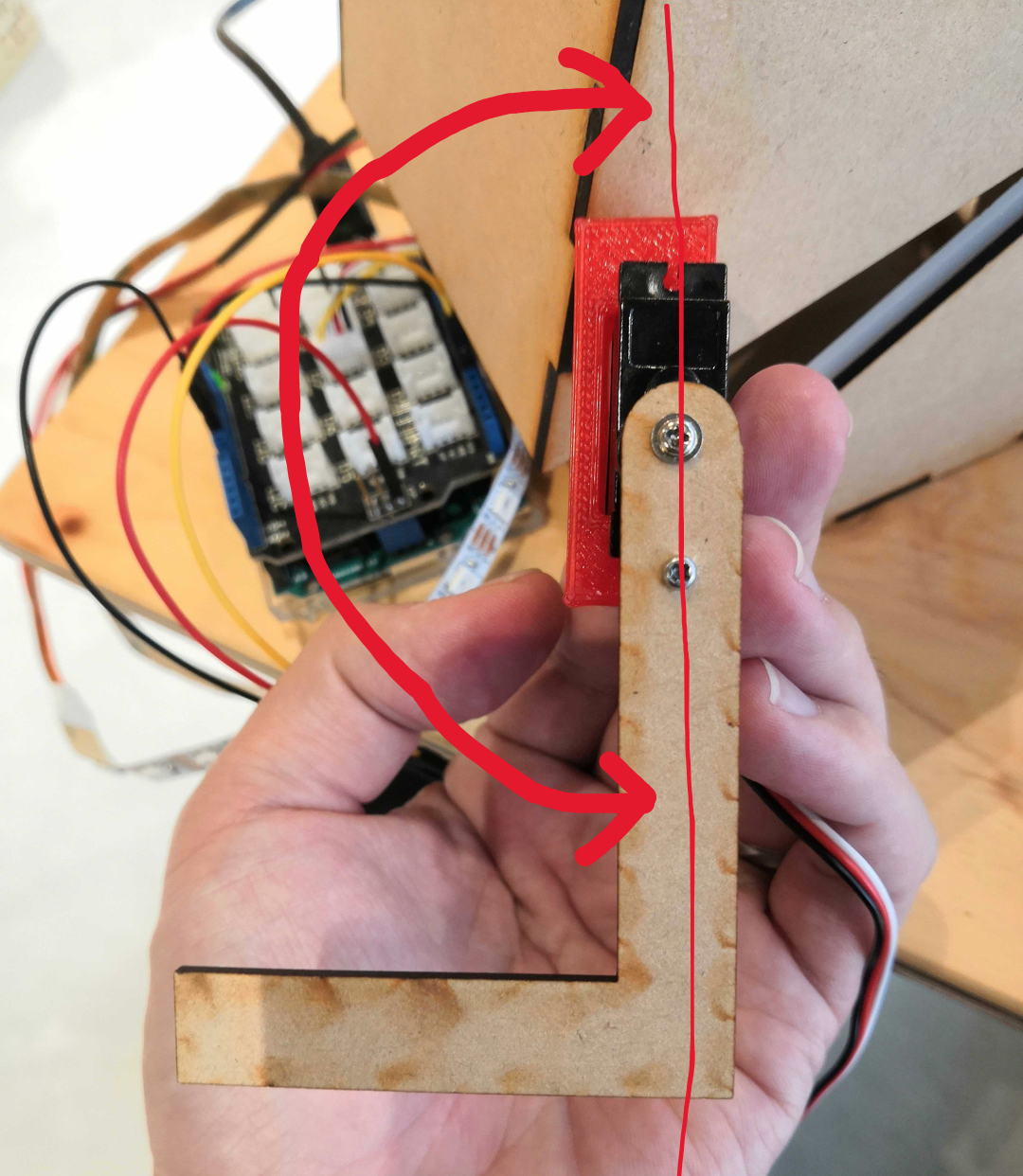
注意:この作業は適当にやっても構わないが、その場合はArduinoスケッチ内のANGLE_UNLOCKとANGLE_LOCKの定数を調整すること。
- サーボのラベルが見えるようにサーボマウント(写真赤色のもの)に取り付ける
- マウンターに取り付けたあと、サーボホーンを写真の様な可動域になるように取り付ける
電気部分
配線する
- Arduino UNOにGROVEベースシールドを接続する
- GROVE超音波距離センサをGROVEベースシールドのD7コネクタに接続する
- サーボ(SG92R)のシグナルピン(オレンジ色)をArduinoの5番ピンに接続する
- LEDストリップのシグナル(DI)をArdinoの6番ピンに接続する
配置する
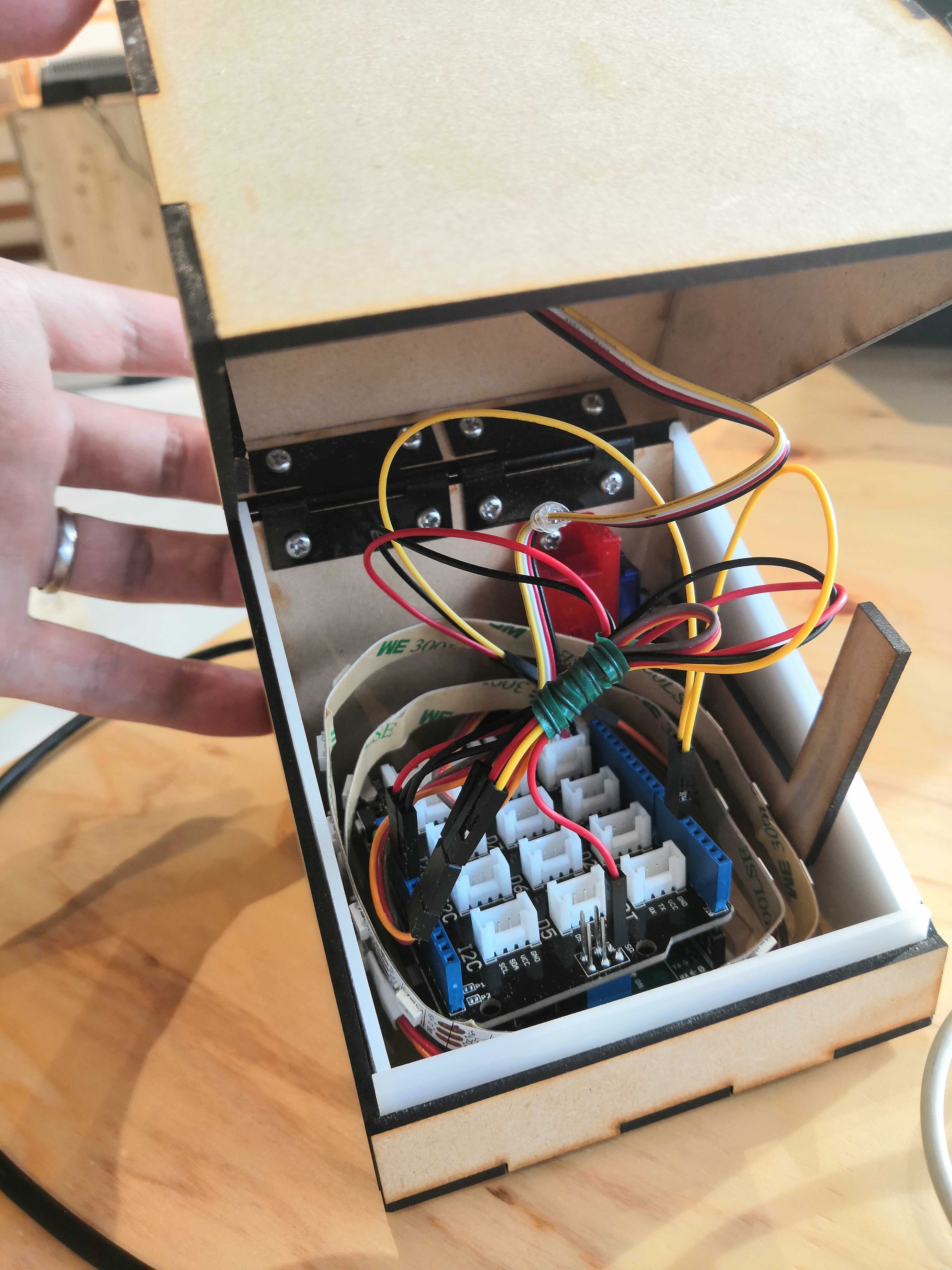
- LEDマトリクスをArduinoに1週させる
- サーボのアームにケーブルが絡まないようにする
電源と接続する

- ハコの裏にUSBケーブルを挿すための穴を開けておき、裏からケーブルを挿し込む