必要なもの
今回はクラス展示用のロボットなので簡単な構造を意識して製作しました。
製作的材料
必要な材料は以下の通りです。
1.アルミ軸(φ12、φ10)
今回の製作では材料の都合上φ10の軸を使用していますφ12で統一できます。
モーターと軸の固定にはφ20の軸から作られたカラーを使用しています。
2.mdf(t = 4)
3.DCモータ(RS-385)(RS-555)
4.フランジ
今回の製作では10mmのアルミ板をNCフライスで加工したものを使用,3Dプリンタでも製作可能です。
5.クリアファイル
6.カラー付きウレタンローラ(外径80、内径12、厚さ30)
7.キャスター
全方位に対応しているものを使用します。
8.木工ボンド
9.つば付きベアリング(内径12,外径21)
10.Cリング
11.ねじ等
回路的材料
開発環境(製作)
1.SolidWorks2013
2.レーザーカッター(加工範囲600*300)
3.卓上ボール盤
4.卓上旋盤
開発環境(回路,プログラム)
設計
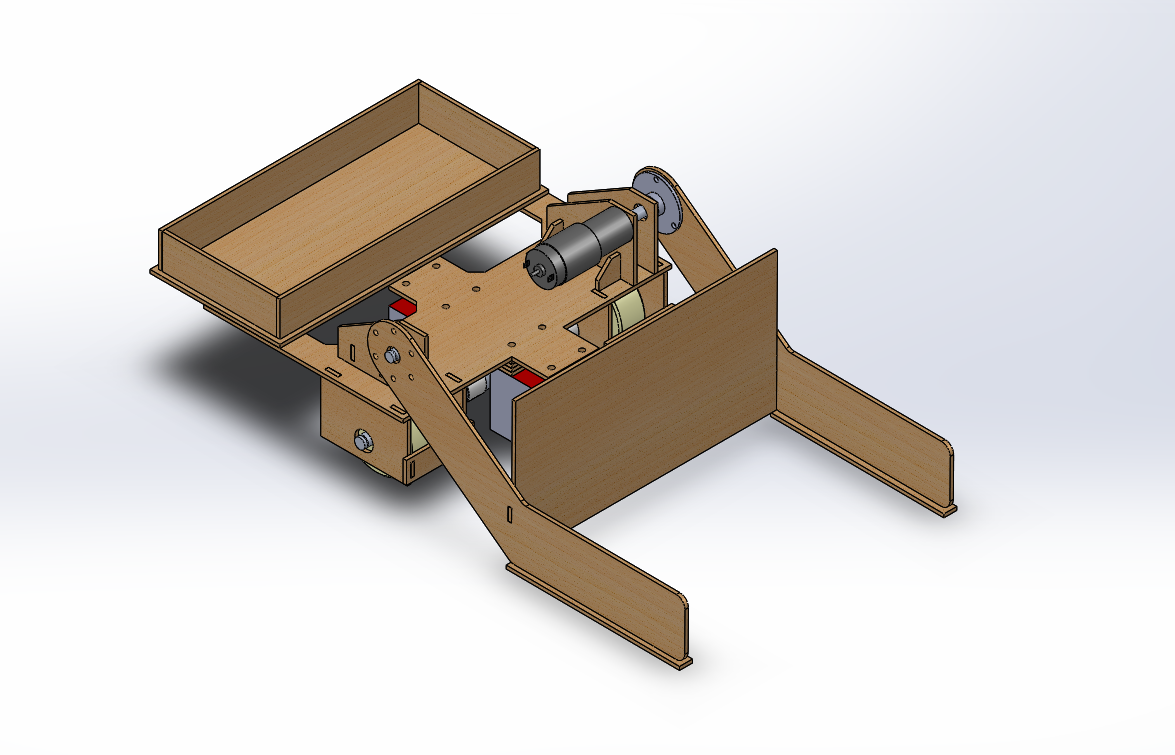
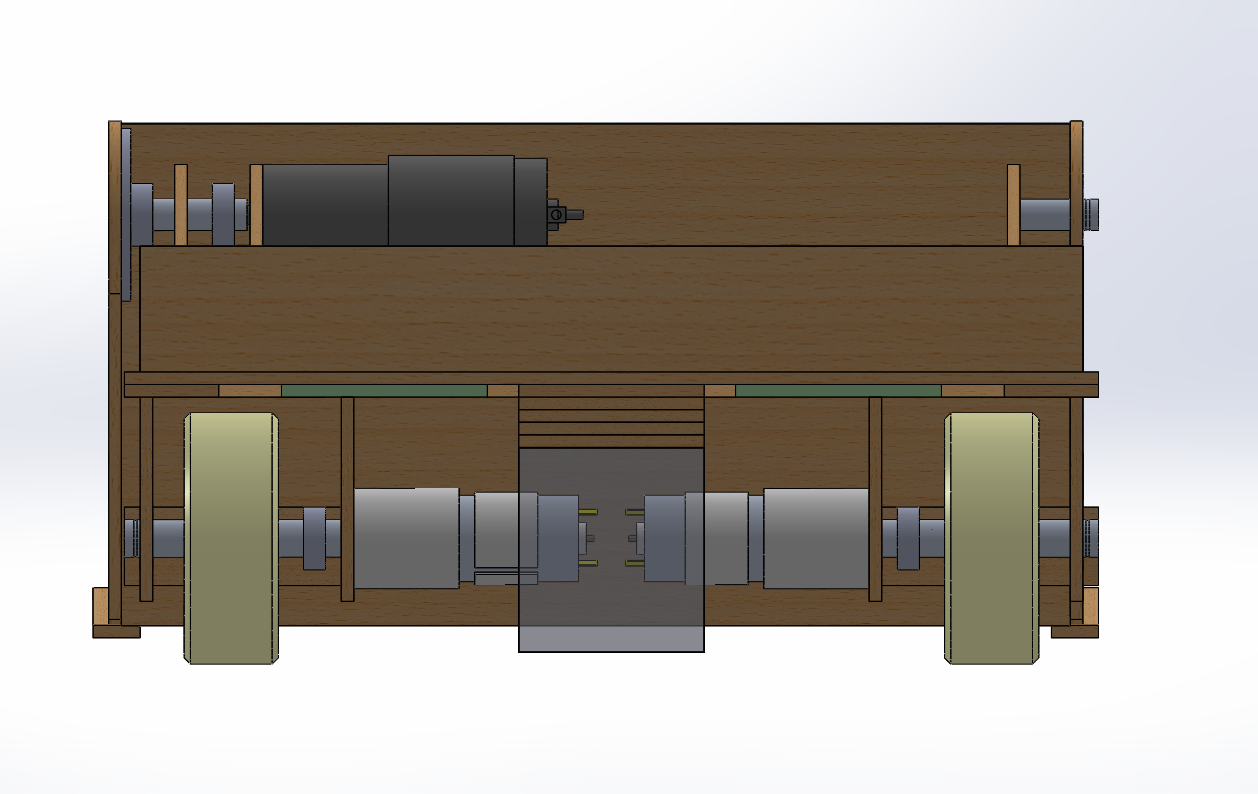
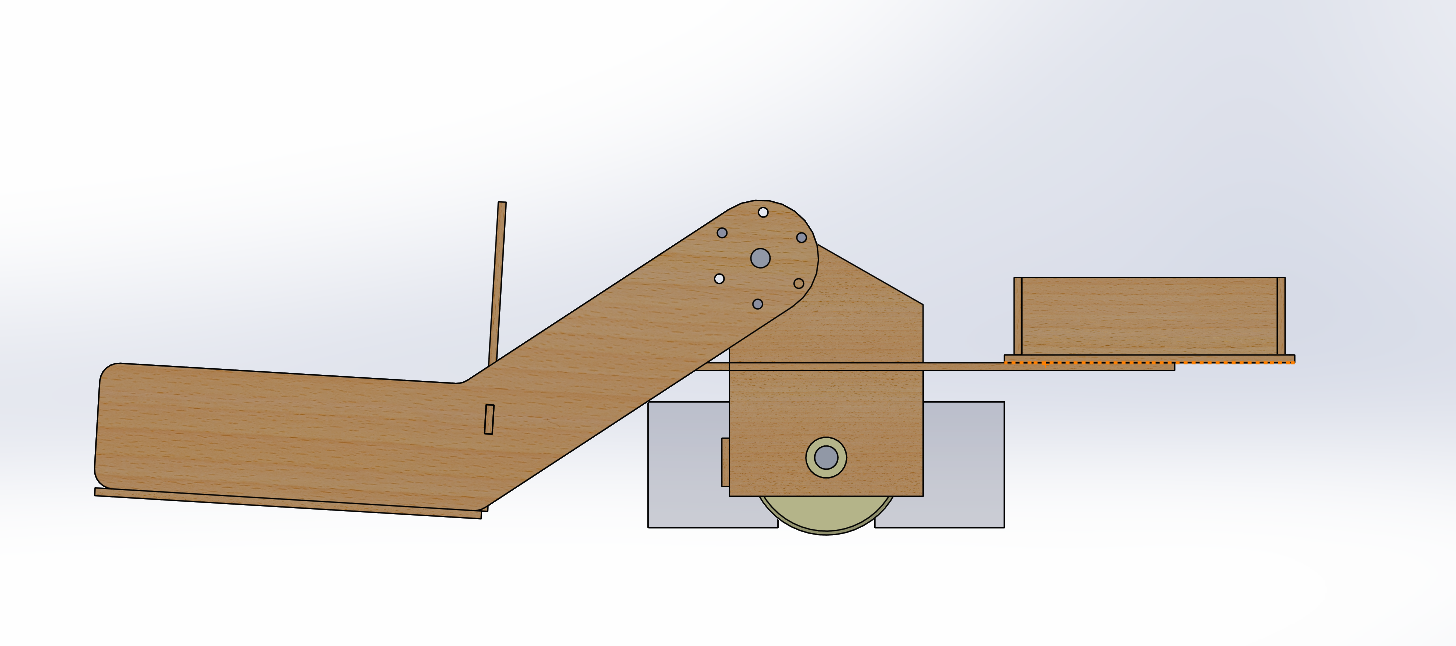
今回は使用済みの軸やカラー,フランジを再利用しているためフランジなどは実際のものとは少々形状の異なるものを,使用しています。
また、キャスターは簡略化されています。
加工

設計をもとに加工していきます。
mdfの加工はレーザーカッターを用いて行い、軸などは旋盤で加工します。
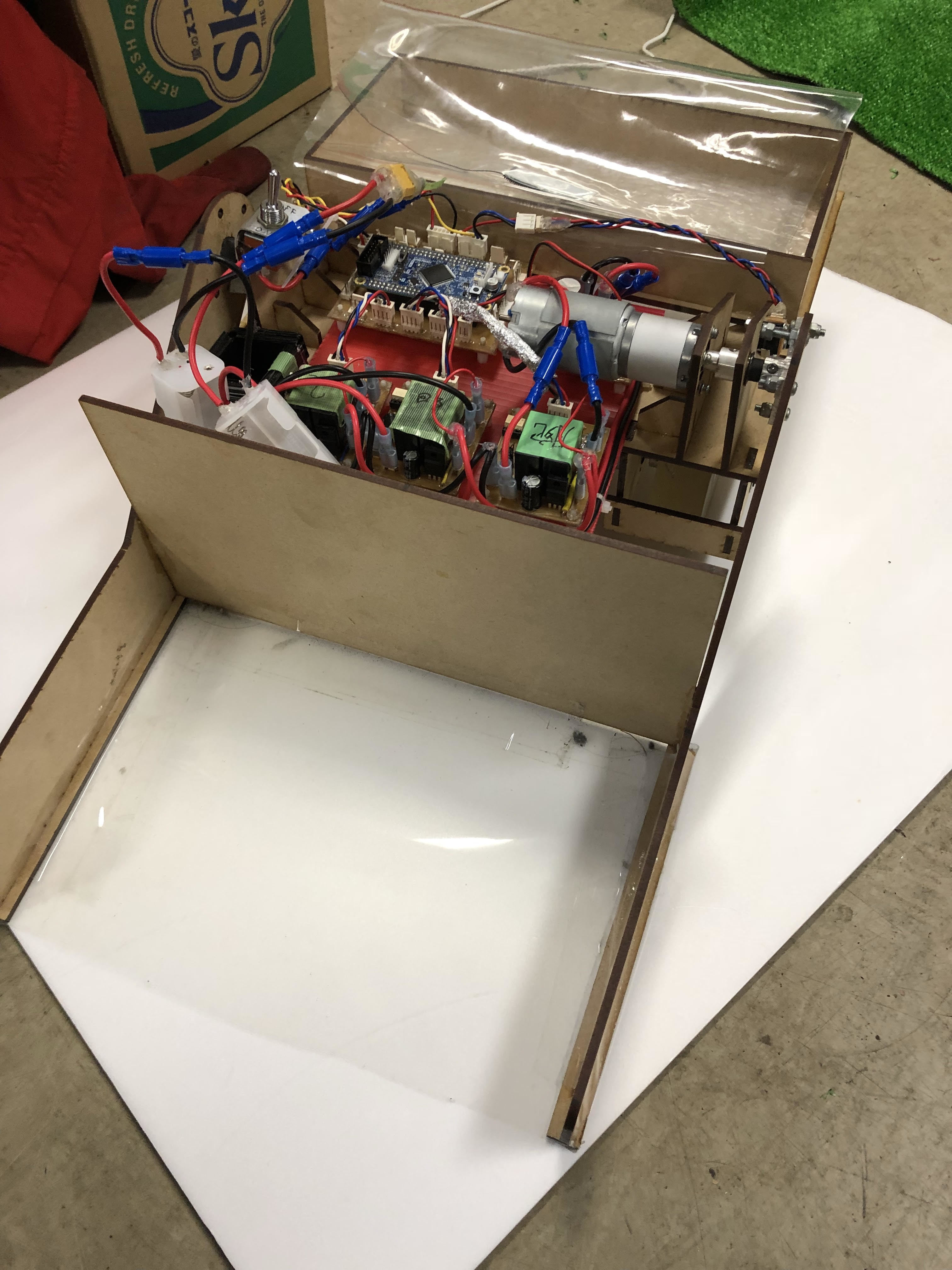
回路製作
ロボットを制御するためのマイコンと、モーターを動かすためのモータードライバ を接続します。
マイコンはそのままでは接続出来ないので、専用のマザーボードを作成。
モータードライバは12v、5Aで駆動するドライバを製作。
今回使った回路
マイコン(RX62) マザーボード × 1
モータードライバ × 3
DCDCコンバータ(12v-5v) × 1
プログラム
コントローラから送られてくるデータを処理し、そのデータに応じてモータを回します。腕を動かす部分のモータは上端と下端にリミットスイッチが付いており、それが押されるところまで動かすとその方向にモータが回らないようになってます。
組み立て
設計を見ながら組み立てます、mdfを組む際には木工ボンドを挿し強度を高めます。
また、クリアファイルを加工して回収部に貼り付けボールが回収できるようにします。
動作確認

コントローラの入力通りに動作しているか、ボール回収の動作に問題はないか、これを用いたゲームの難易度などを確認し、高専祭で遊びに来た人々が遊べるように調整をしていきます。