ロボットについて考えてみる
ロボットの使い道がよくわからなかった。pepperロビやマノイ、ボッコなど様々なものがロボットとして販売されているが、ハッカソンなどを見ていてもどうもぴんとこなかった。
産業用ロボットと買えるロボット
産業用ロボットは、機能を果たすために様々な進化を遂げている。ものづくり工房にあるロボットハンドもその一つで、動かし方次第であらゆる機能を果たすことができる。一方で個人が購入できるロボットとはコミュニケーションを促進するためのものとして作られているものが多く、pepperくんもあれだけ高度なロボットハンドが付いているにもかかわらず、ドアノブを握って回すことはできない。asimoもやっとドリンクを運ぶことができるようになってきたぐらいだ。
DMM.make ROBOTS
弱いロボット
先日WiredConferenceで、弱いロボットというものが紹介されていた。そのロボット自身はゴミを掴んで自分のゴミ箱に入れることはできないが、それを周りの人に促すような動きをするというもので、とてもおもしろかった。
手動と自動化の間
これを見て、C向けのロボットはある一つの機能を持たせて、自動化とは違う、アニミズムのような感覚を生まれさせれば価値が生まれてくるのではないかと考えた。
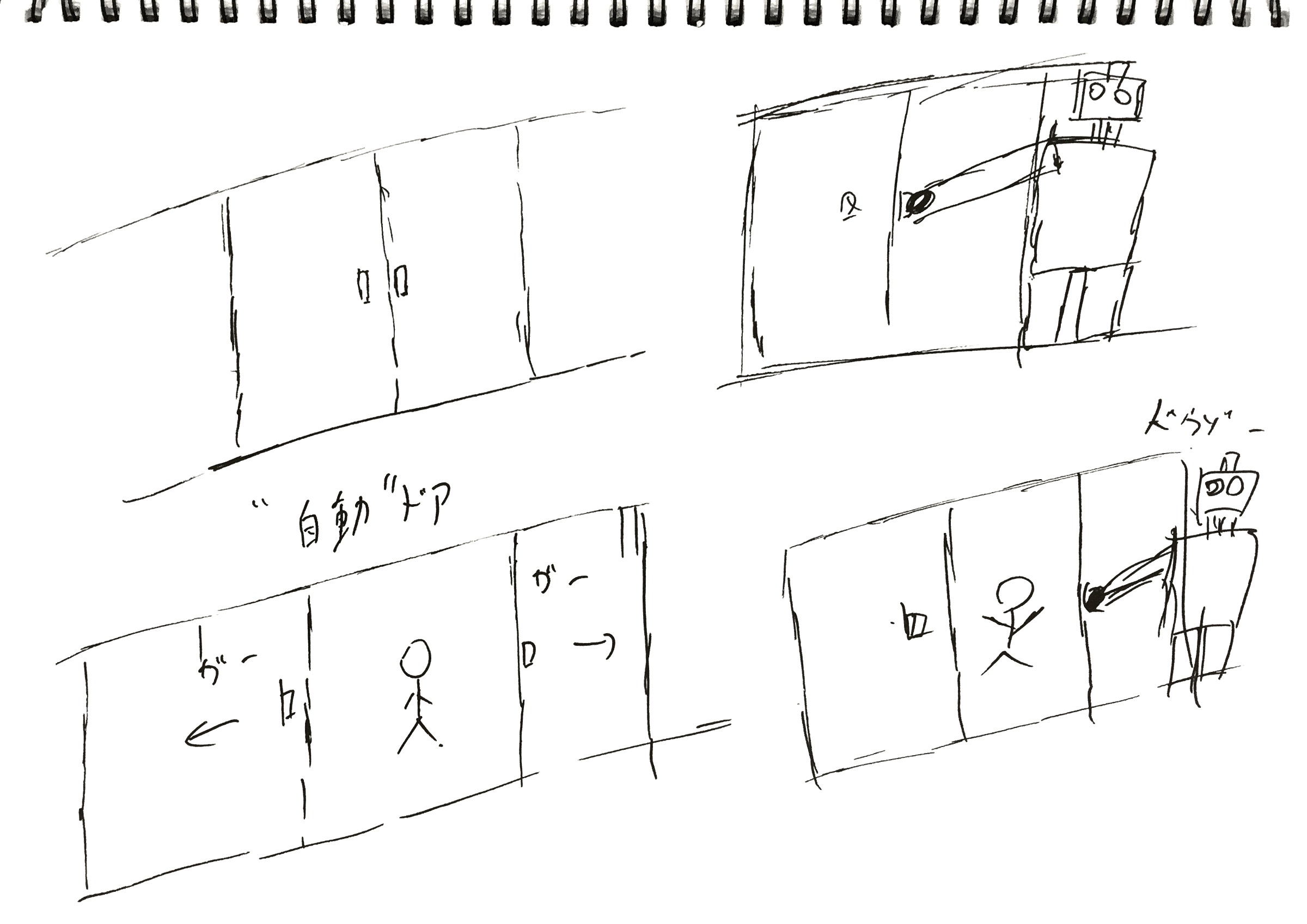
ゴミ箱のフタを開けるロボット



ロボットと言っても難しく、大きい物は一週間では作れないので、なにか小さくてモーターで動かせるものを探した。
そして、ゴミ箱の蓋を開けてくれるロボットを作ることにした。
実際にSFCのサブウェイにあるフタ付きのゴミ箱を採寸した。
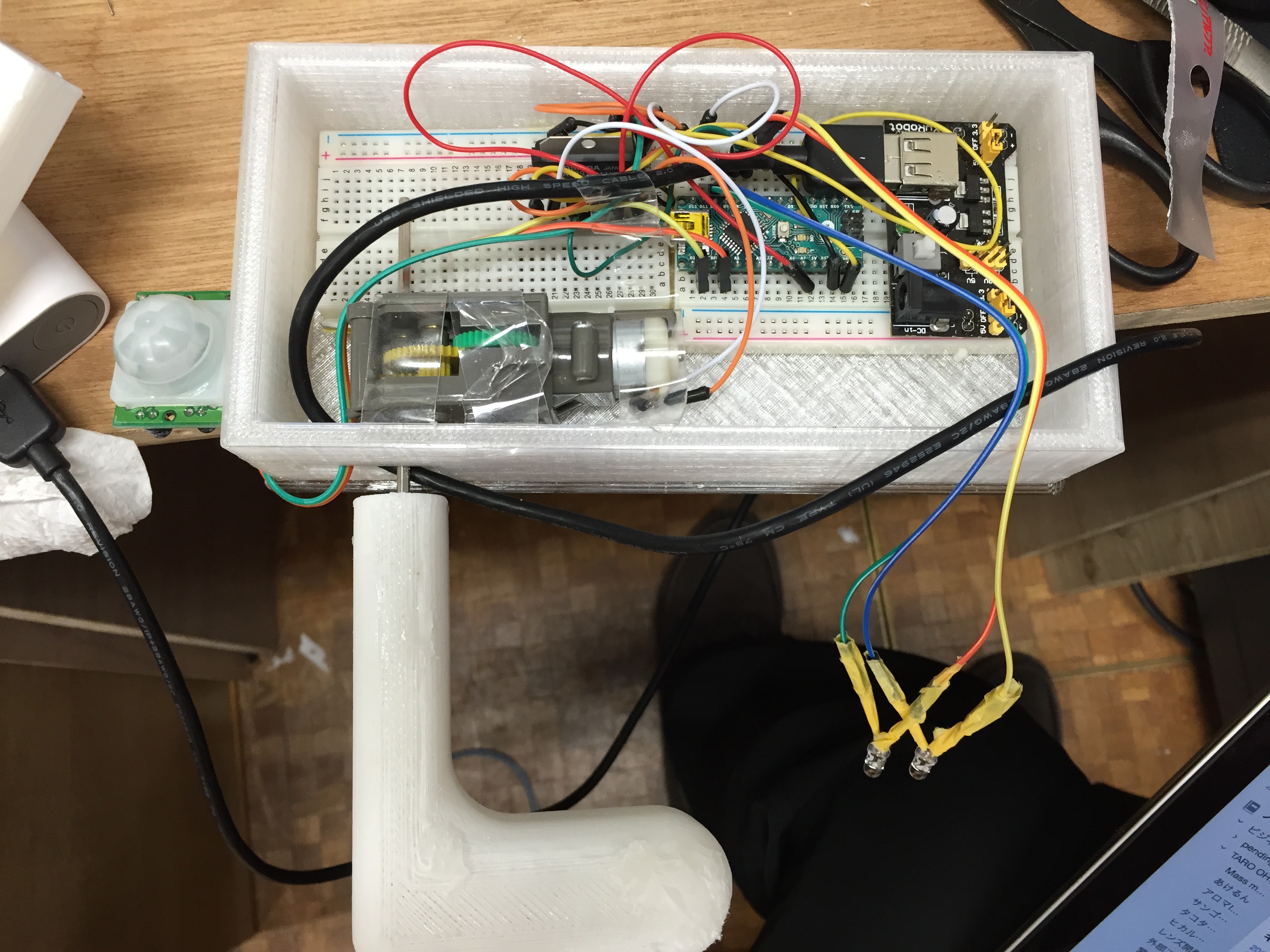
中身
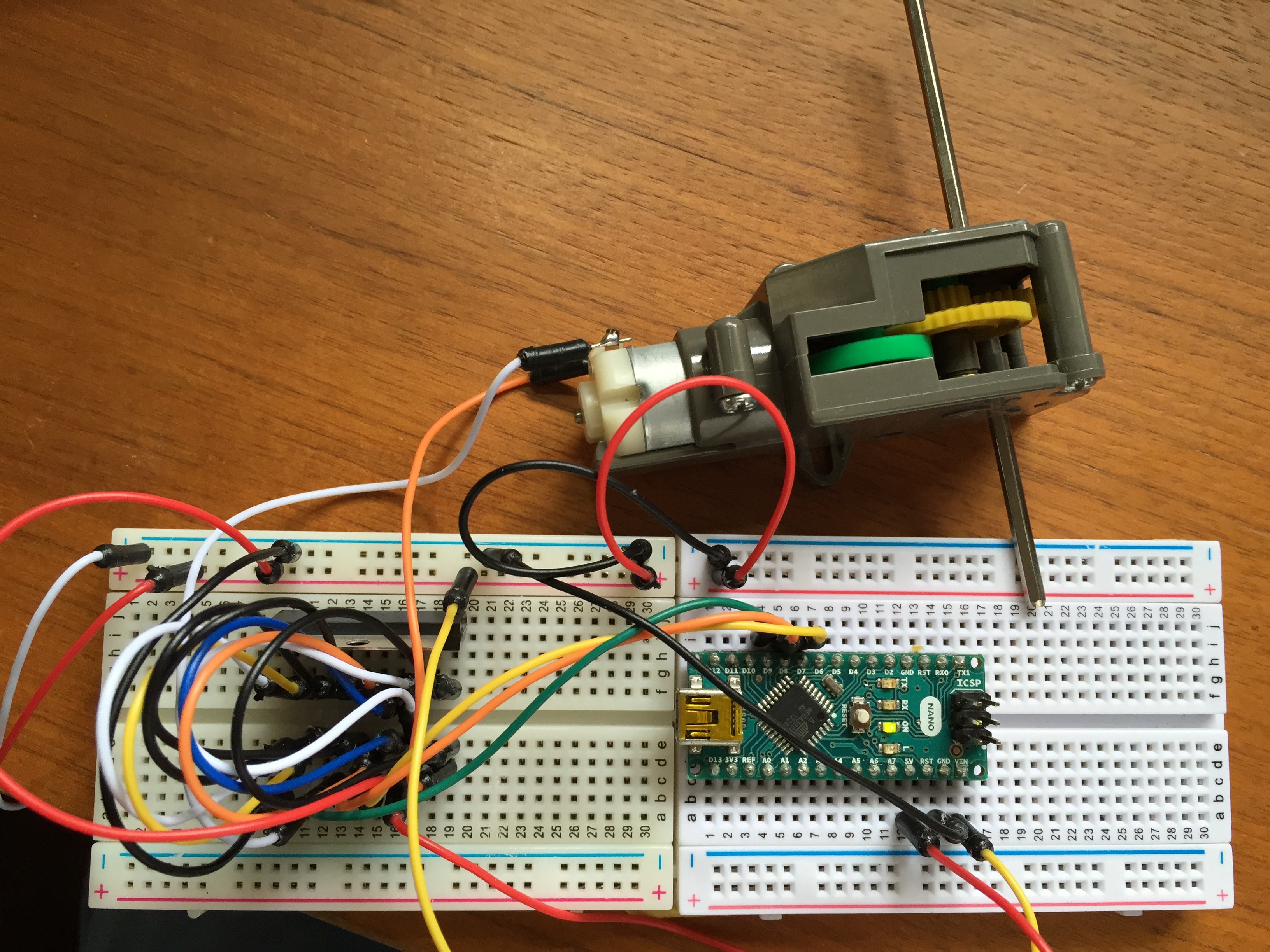
ArduinoNanoを使って、モーターを動かすことにした。
ドライバーにはTA7291Pを使用。
以下のサイトを参考にして配線・プログラムを書いた。
動作
人感センサーをつけてプログラム
センサの値をシリアル通信で
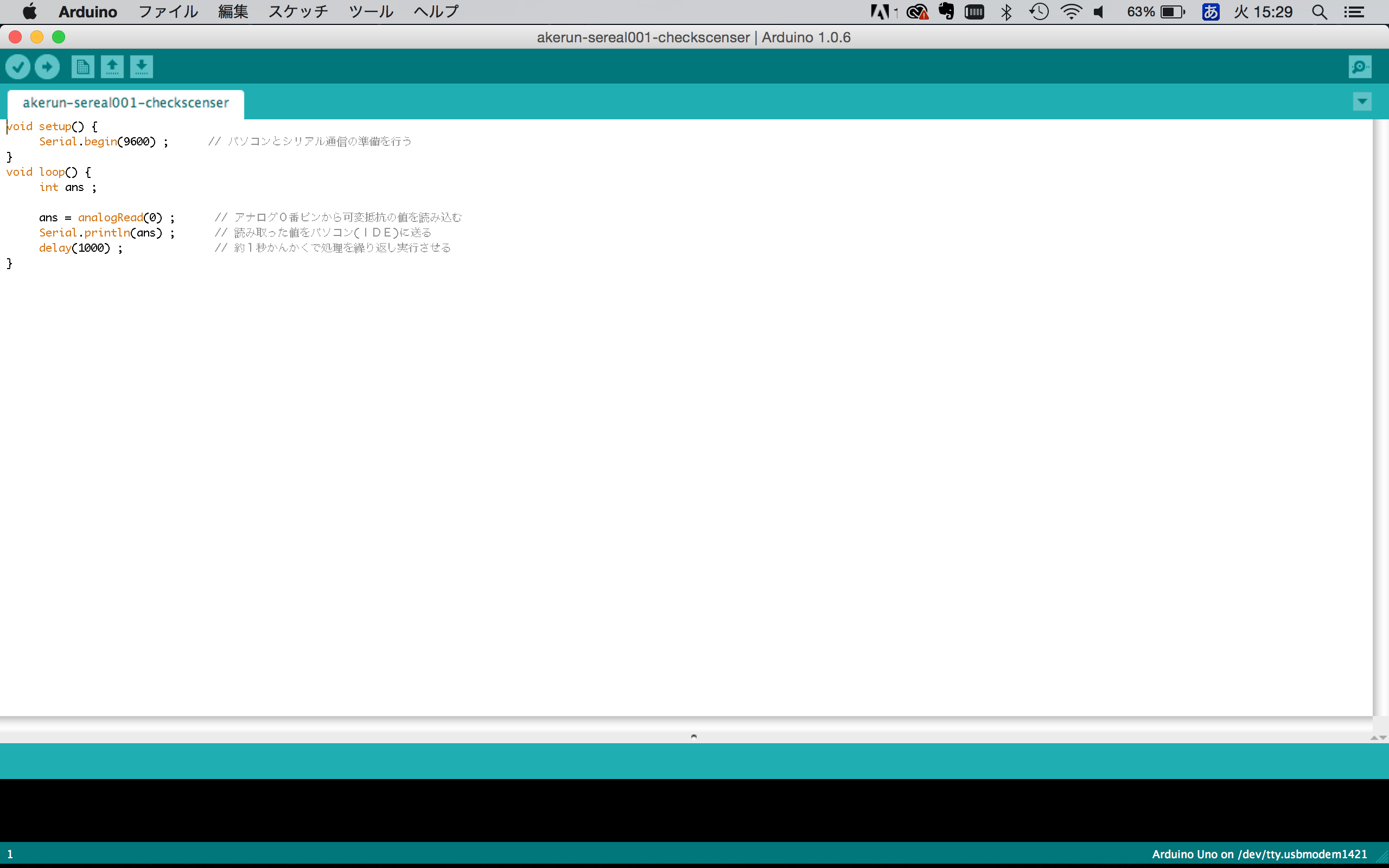
PIRセンサの値をシリアルで確認すると、0 か 600前後だったためanalogInにして500にしきい値を設定した。
Digitalでも良いとされていたが、0がどの程度綺麗に出ているかわからなかったのでAnalog念のためAnalogに。
プログラム完成
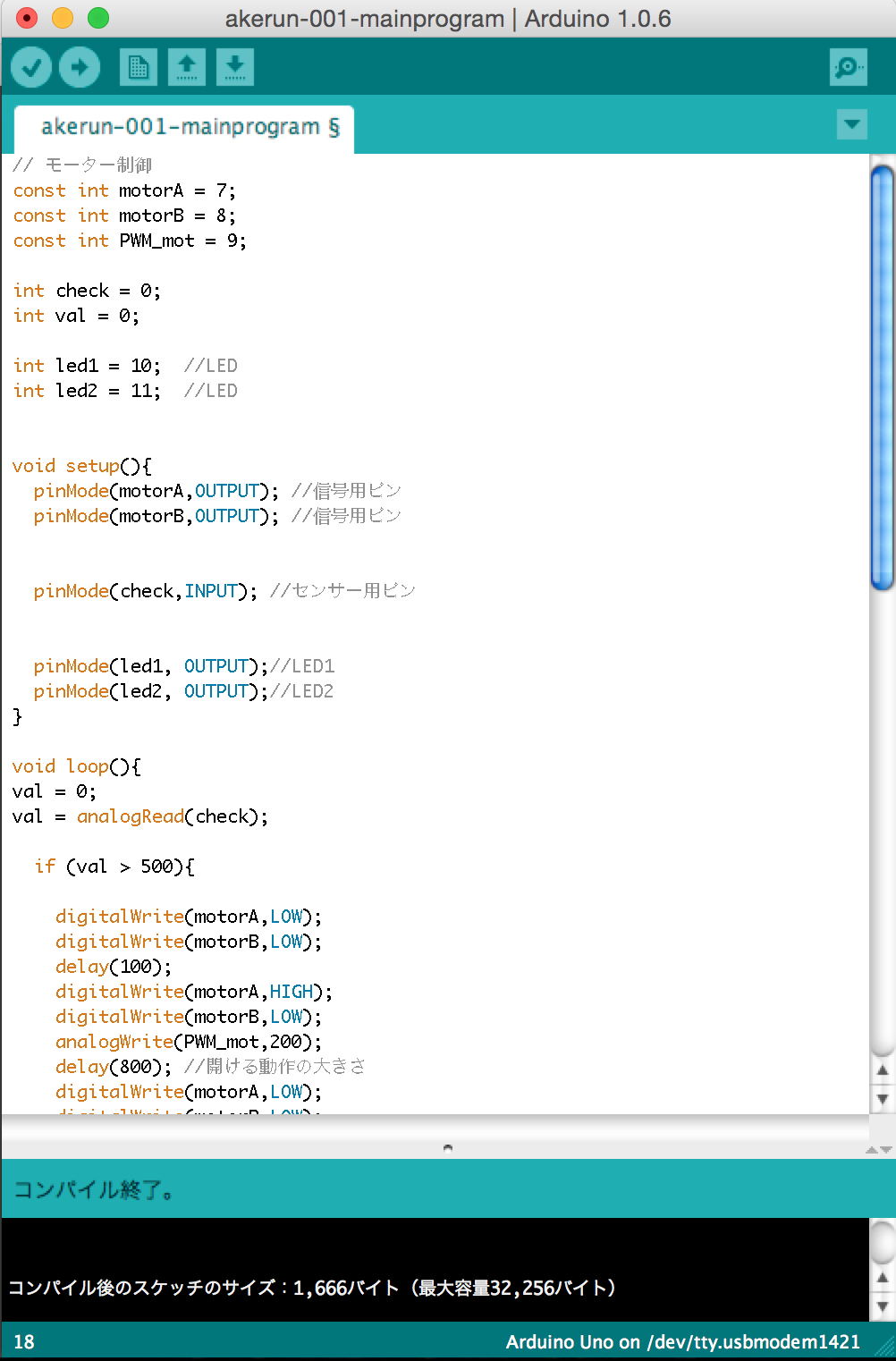
せっかくなので、開けている間眼が光るようにした。
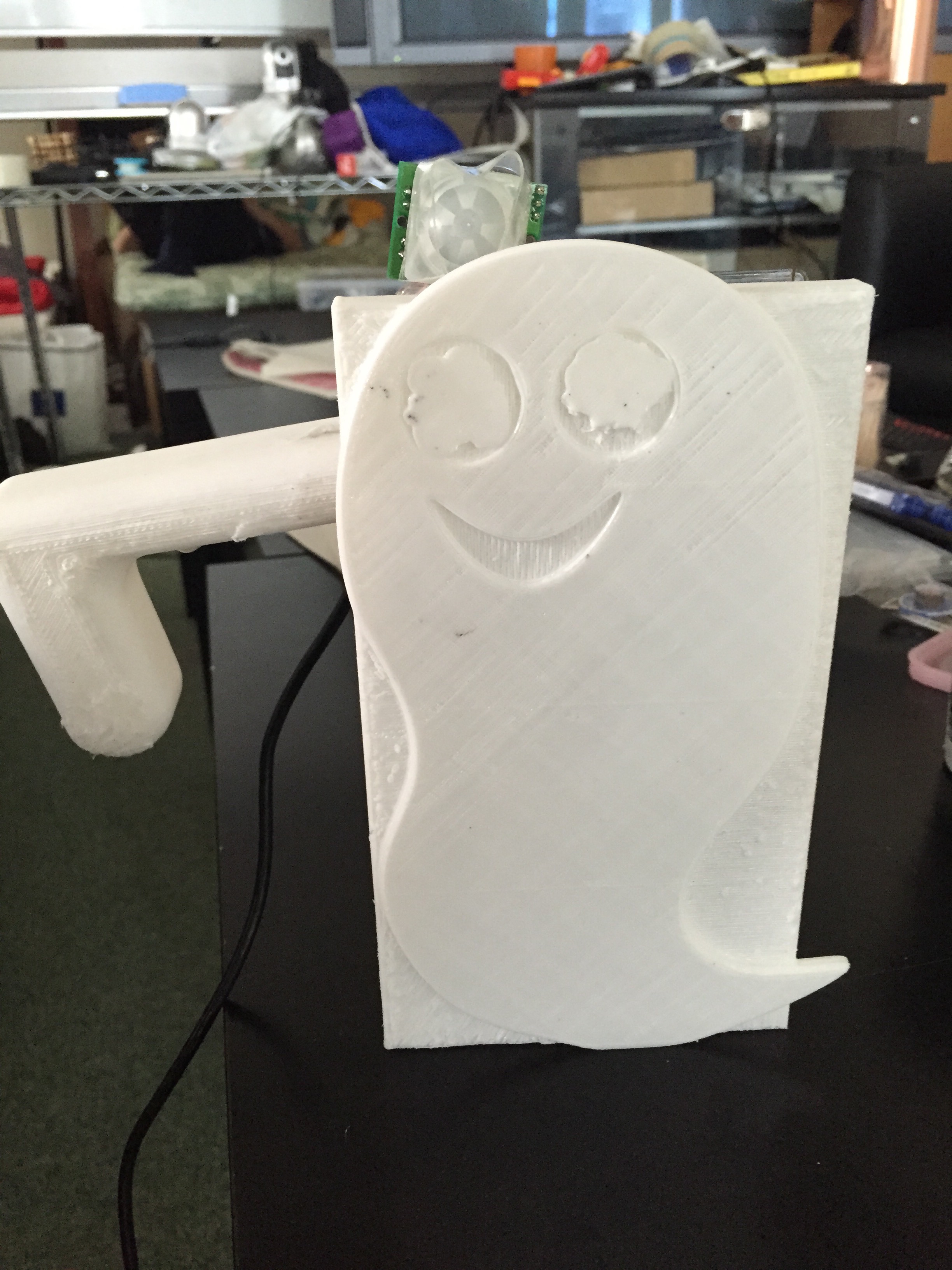
中身ができたので、外装を作っていく。
ハンドル部分
ハウジング
今回は貼ってはがせる両面テープを使った。
完成
実際の利用 学生生活課が検討中
Subwayのゴミ箱を採寸して作ったので、Subwayに設置のお願いをしたところSubwayの責任者の方からはOKが出た。ただし、学生生活課に一応申請してほしいとの事だったので、学生生活課へ。
学生生活課にお願いしたところ、書面で企画書を出してほしいとの事だったので作成し提出。30日朝一で課長と検討してメールを出すと言っていただいたが、まだ許可が出ていない。許可が出次第実際に設置して実験してみたいと思う。
カスタマイズ
猫の手