前回のモーター
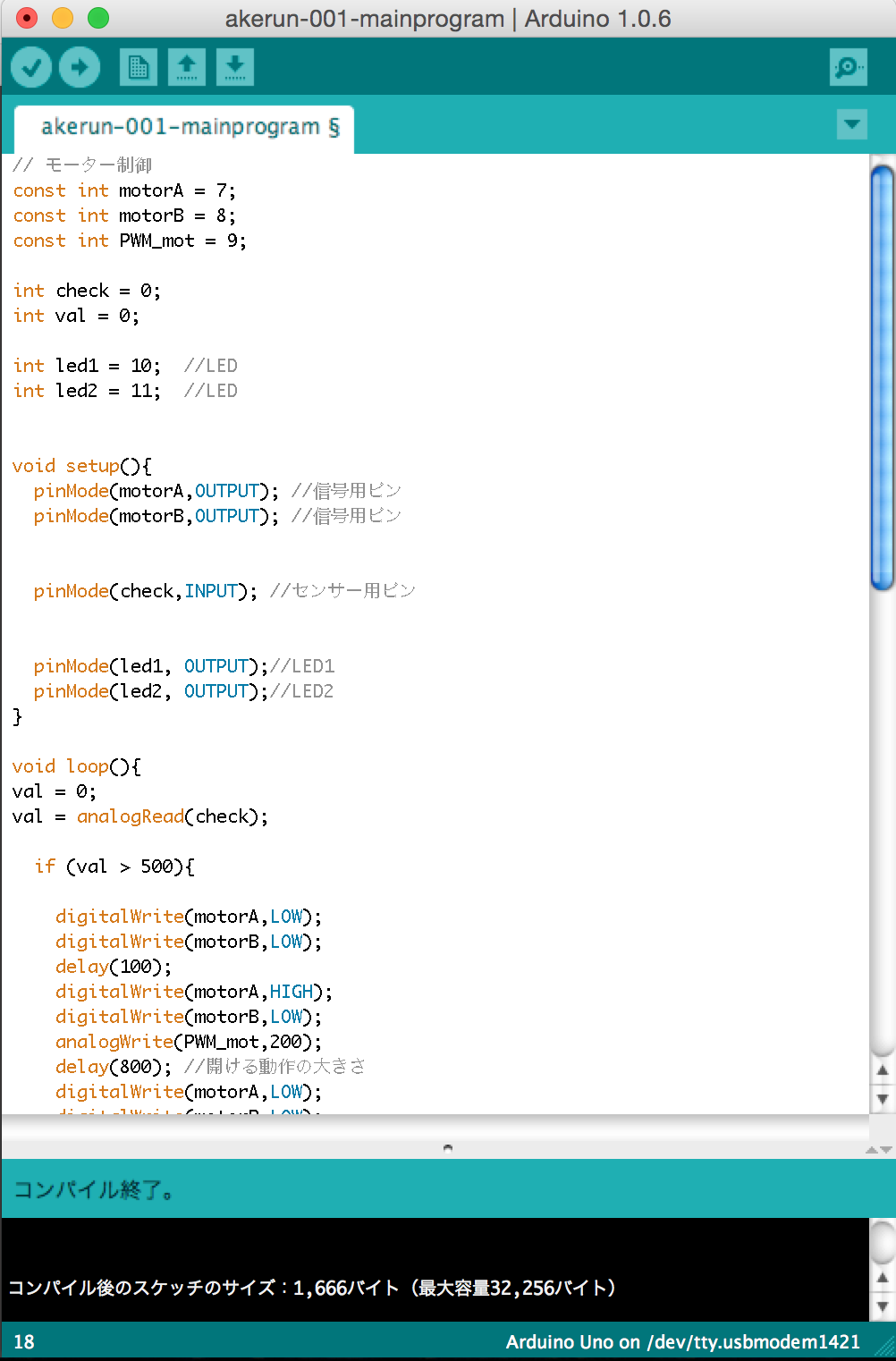
前回のゴミ箱を開けるロボットは、正転・反転をdelayを使って時間で見ているだけであり、特にモーターの位置を見ているわけではなかった。結果、実際にゴミ箱のフタを開けるような場面では開ける方は余り開かず、戻す方だけ勢い良く戻ってしまいどんどん腕が前に来てしまうという問題があり、それをdelayの値を調整することで無理やり解決していた。
理系の友人に注意される
前回でモーターの制御をしたつもりになっていたが、理系に行った友人にそもそもフィードバックを伴わないものは制御でも何でもなくただ動かしただけだと注意され、フィードバック制御の基礎という授業のテキストを貸してくれることになった。
そこで今回はロータリーエンコーダの仕組みを理解するため、自分で作ってみることにした。
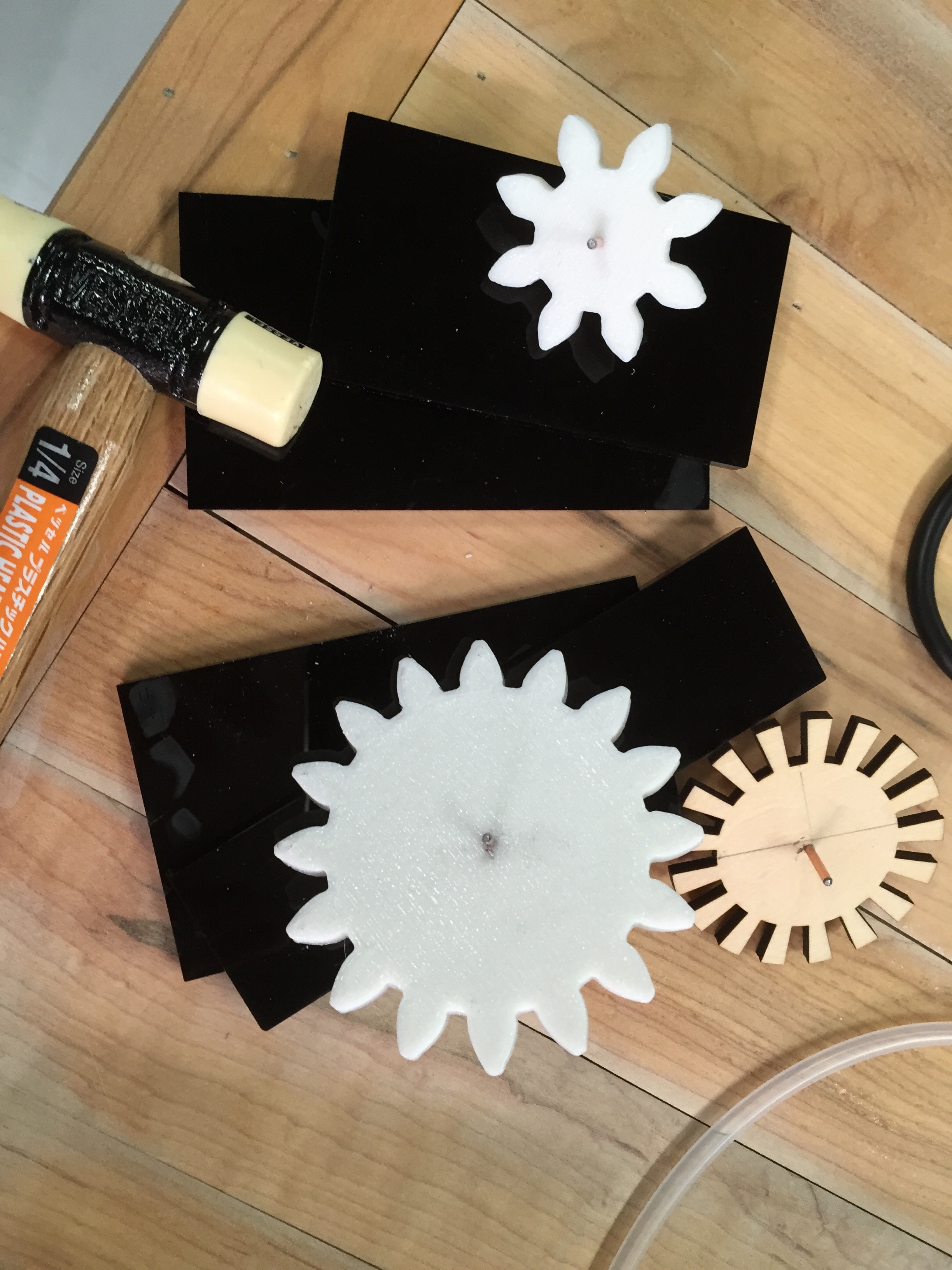
レーザーカッターで羽を作る
レーザーカッターでエンコーダの羽を作る。
3Dプリンターでもつくろうかと考えたが、スライスの時点でくびれの部分が怪しかったのでレーザーカッターで作ることにした。
図書館trotec
オペレーション・設定はFABコンサルの方が行ってくれました。
とても怪しい部分
Geargenサイトでギアを作る
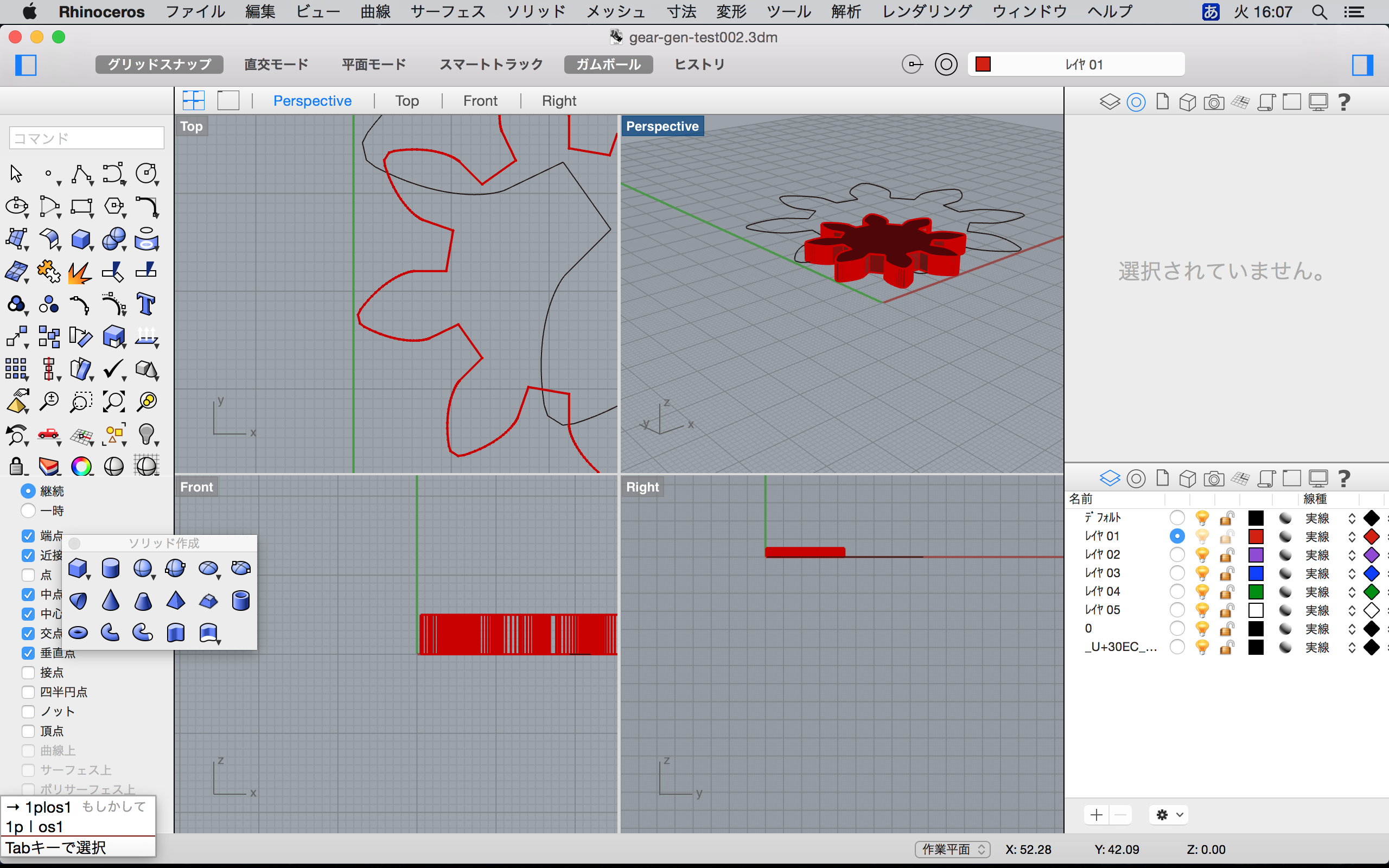
Gear Generatorのサイトでギアを作成し、rhinocerosで押し出した。
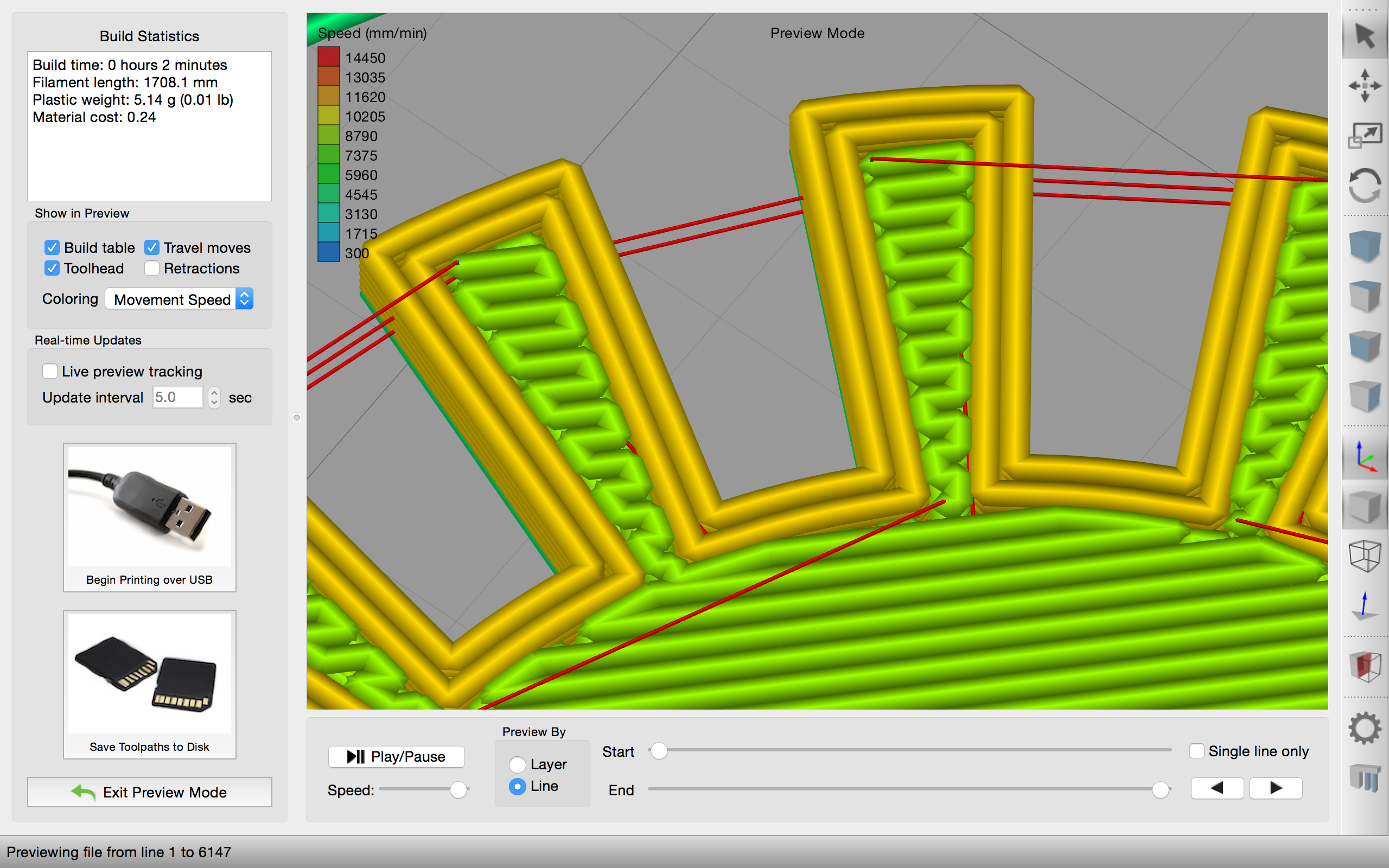
ギアは今回は3Dプリンターで作ることにした。
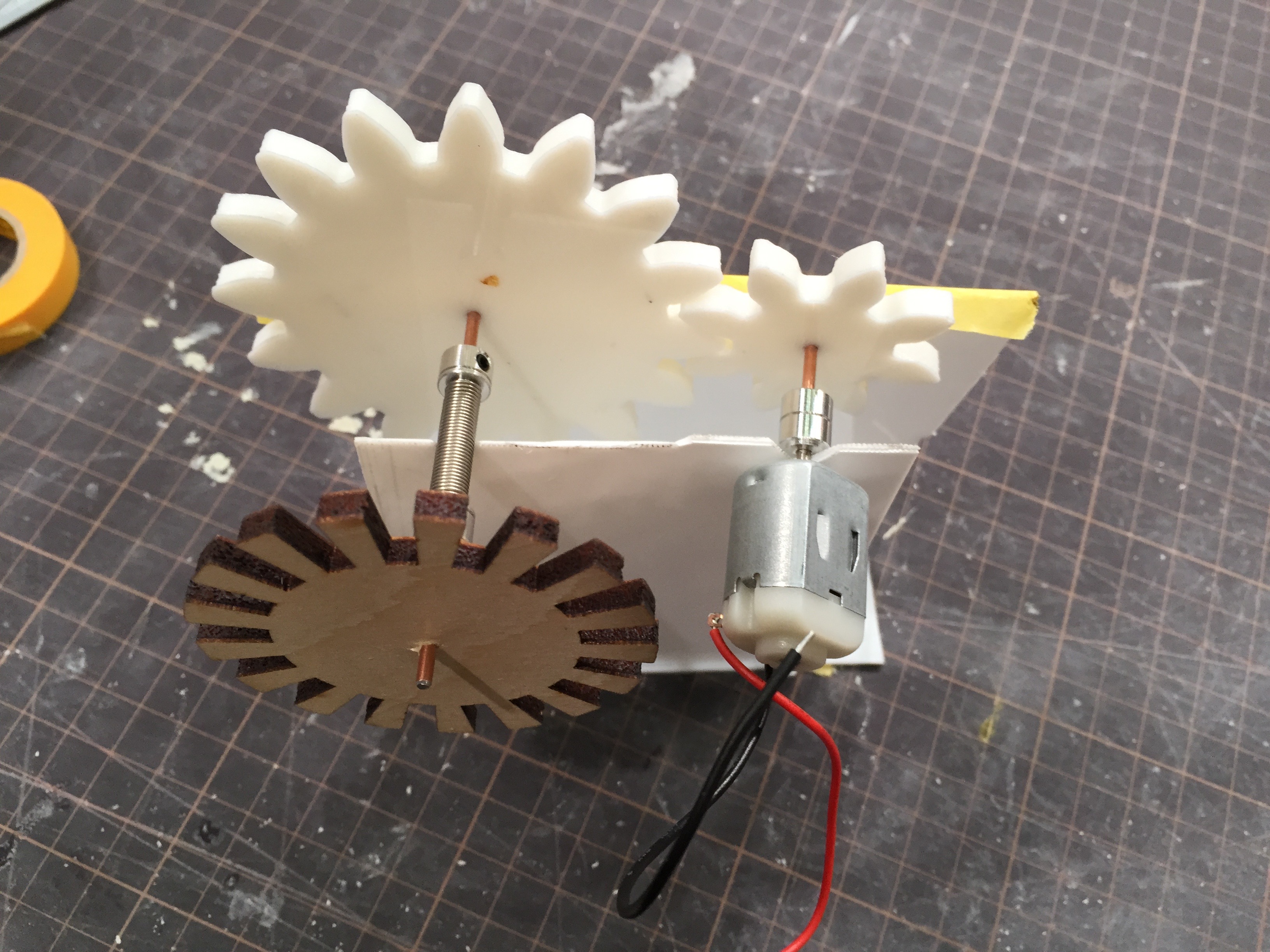
3Dプリンターでギアを作るにあたって
前回はこのジョイントの部分がかなり怪しく、エポキシのパテを入れても強度があまりなかった。そのため今回はInfillを100%で出した。その結果、金属の芯をハンマーで打ち込むぐらいしっかりとしたジョイントを行うことができた。
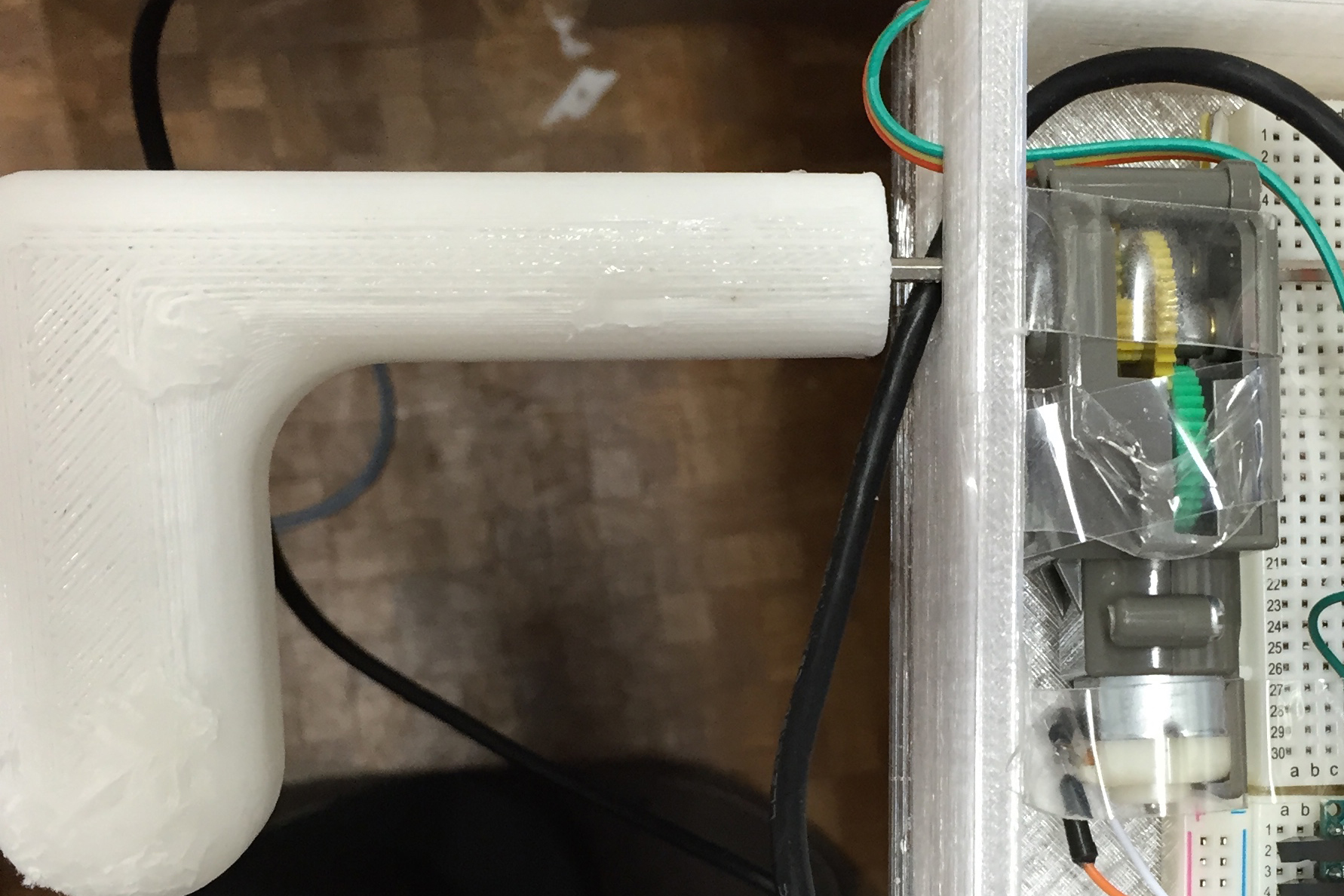
打ち込み
仮組
プラ板で大体のサイズをみる。
Fusion360で枠を作成
組み込みプログラミの入り口 割り込み が登場
今回はセンサーを常に監視して、反応があった際にカウントを足し、また元に戻るということが必要だったため、割り込みを初めて使った。
このサイトを参考にし、割り込みを初めて行った。