各部品の作成
Fusionにて「はかりに関する各部品」を作成する際の寸法や説明を記載します。
手順に関する画像を同時に乗せるので、クリックして見ながら読むと理解しやすいと思います。
作成の際は、後にアセンブリを行うため部品ごとの作成をお願いします。
今回の作成はなるべく3Dプリンターでの印刷も目途に行いましたが、後述する歯車のモーションスタディの件も含め実際の駆動は未確認です。あくまでPC上での機構教材のようなイメージで閲覧ください。
なるべく細かく記載しますが、難しい場合は各部品のデータをダウンロードすることもお勧めします。
外枠の設計
「外枠」~step1~
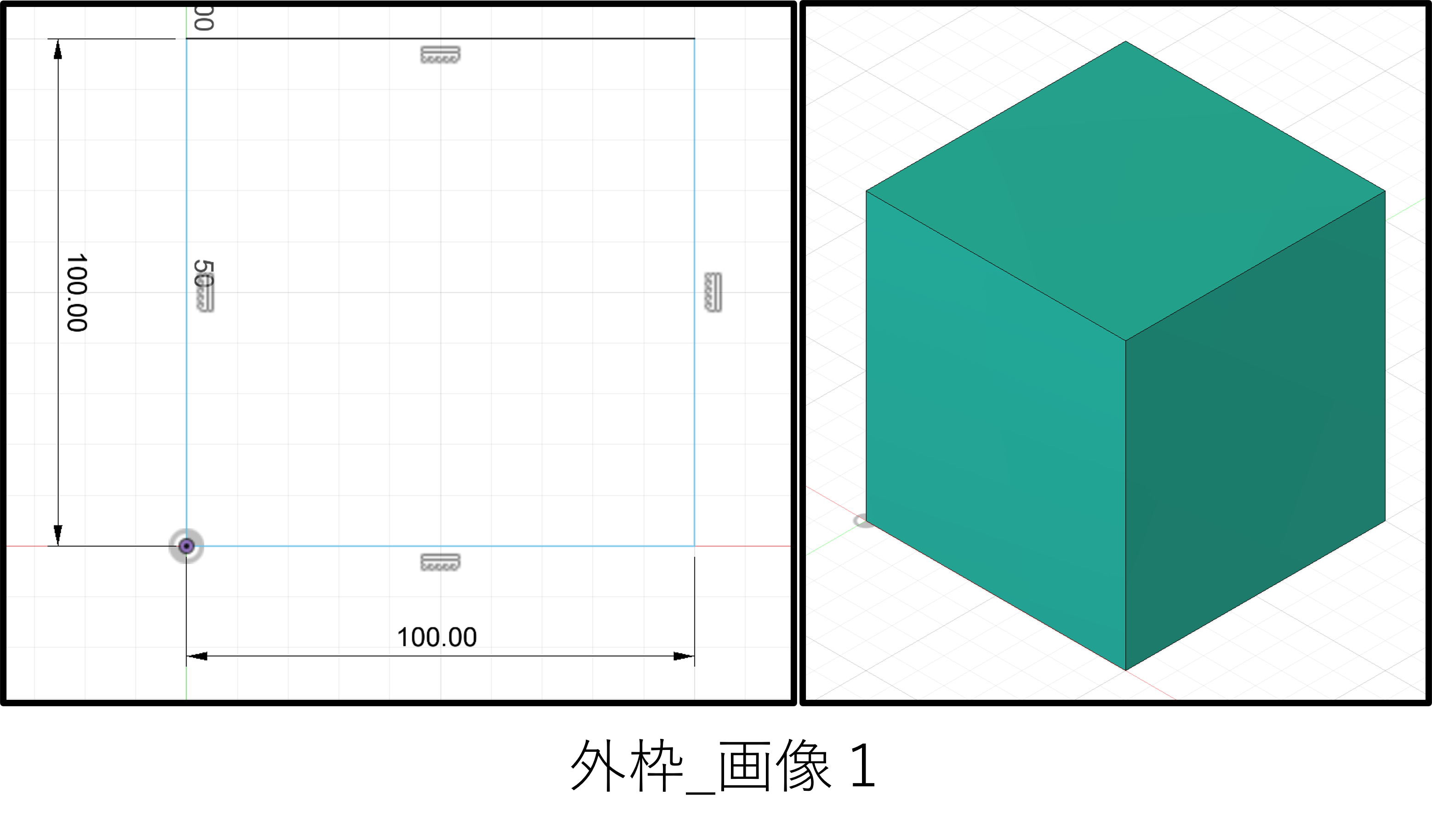
原点から縦横100mmの正方形を描き、押し出しで高さが110mmの箱を作成します。
「外枠」~step2~
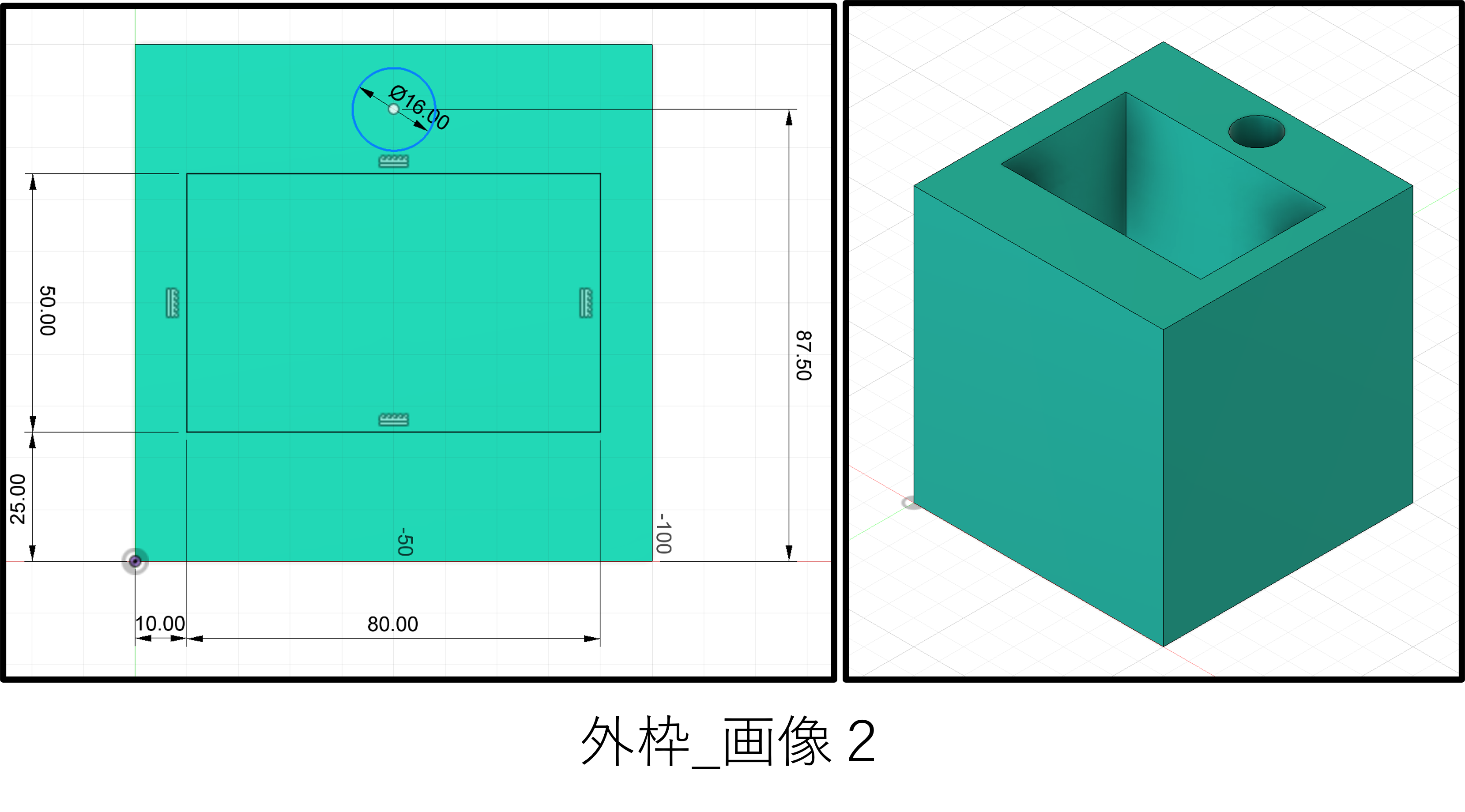
上面を選択して、縦50mm×横80mmの四角形とΦ16の円形を描きます。
四角形は縦幅が両側25mm , 横幅が両側10mm残るよう作成します。
円形は原点から縦87.5mm , 横50mmの位置に作成します。
その後、押し出し[切り取り]にて下部へ90mm切り取ります。
※四角形のくり抜きは上皿などが、円形はねじパーツが取り付けられるよう設計しています。
「外枠」~step3~
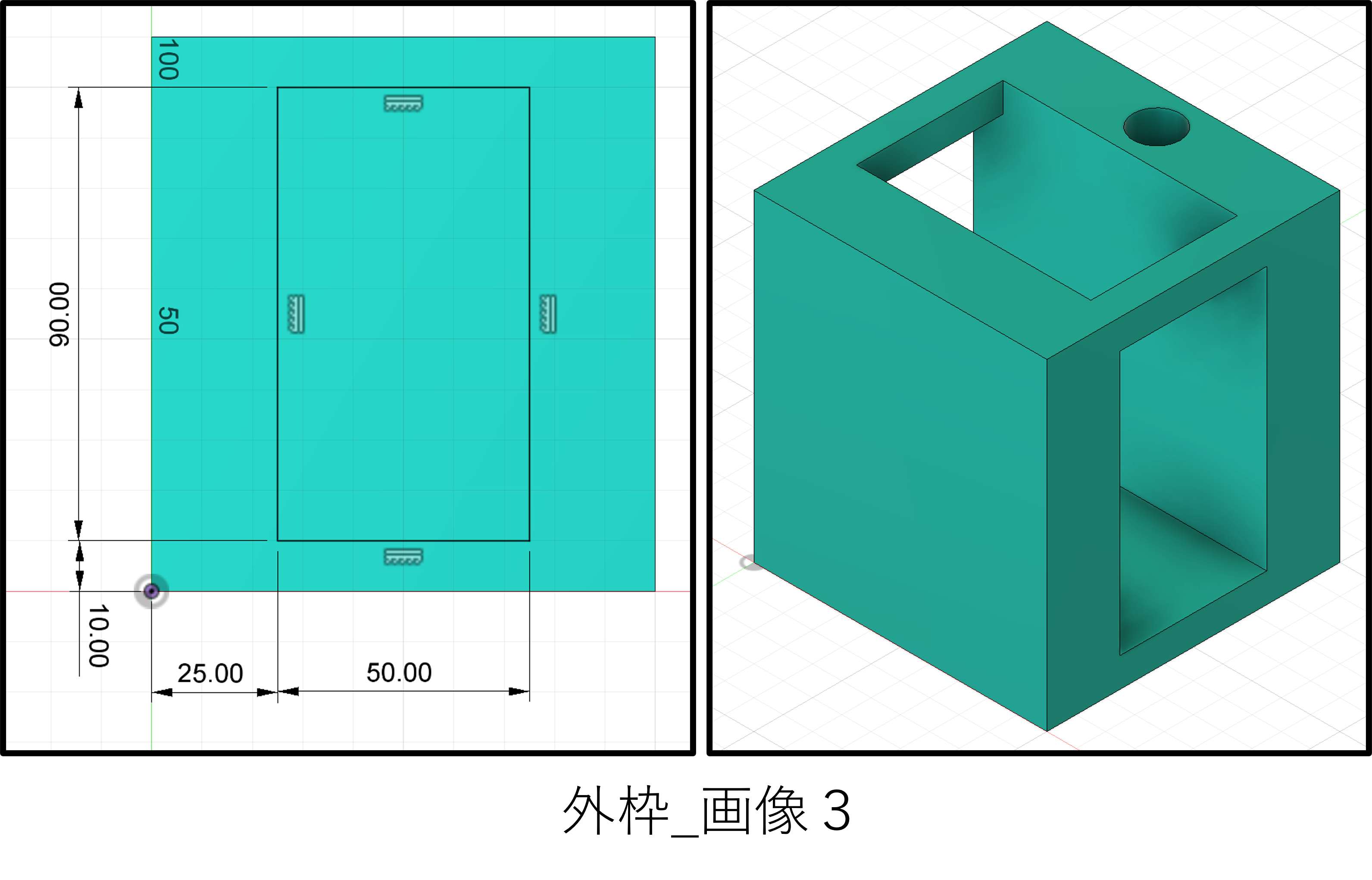
側面(どちらでも可)を選択して、横50mm×高さ80mmの四角形を描きます。
四角形は横幅が両側25mm , 高さ幅が両側10mm残るよう作成します。
その後、押し出し[切り取り]にて反対側まですべて切り取ります。
※動作を確認するための窓穴です。
「外枠」~step4~
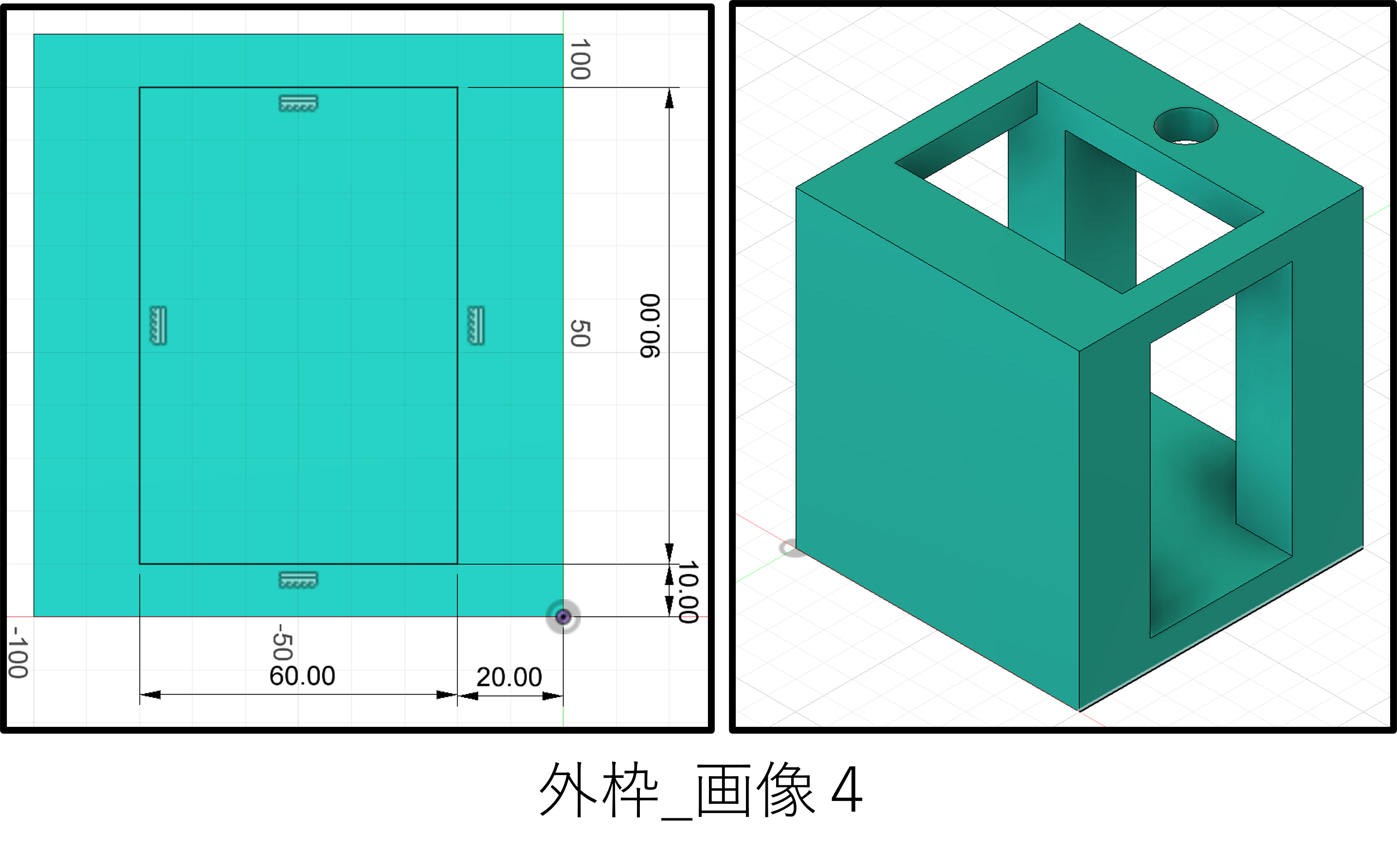
後面を選択して、縦60mm×高さ90mmの四角形を描きます。
四角形は縦幅が両側20mm , 高さ幅が両側10mm残るよう作成します。
その後、押し出し[切り取り]にて前面方向に厚み分の25mmを切り取ります。
※部品を取り付ける&動作を確認するための窓穴です。
「外枠」~step5~
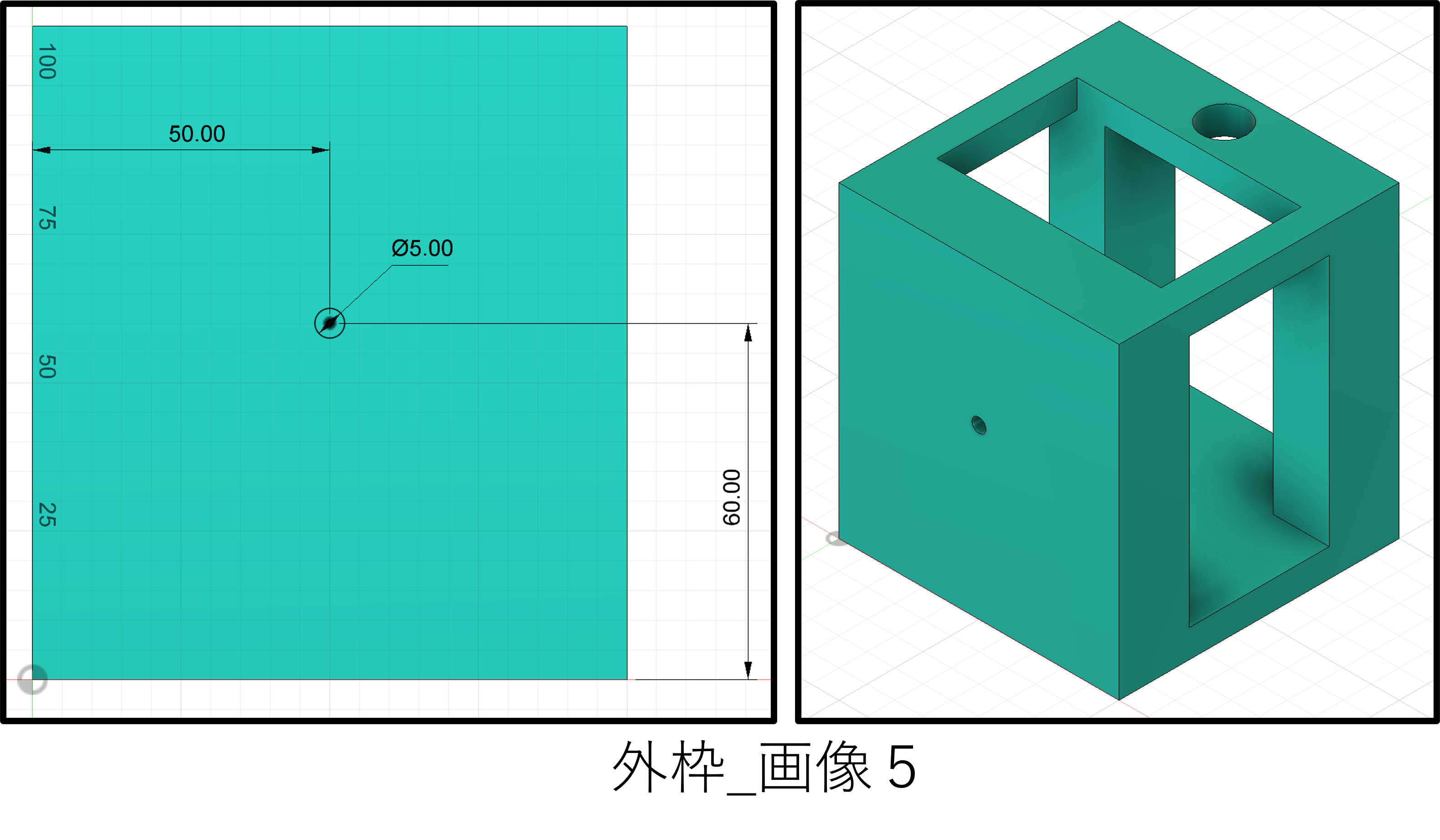
上面を選択して、Φ5の円形を描きます。
円形は原点から縦60mm , 横50mmの位置に作成します。
その後、押し出し[切り取り]にて後面方向に厚み分の20mm切り取ります。
※はかりの読み取り針が設置できるよう穴を開けます。
「外枠」~step6~
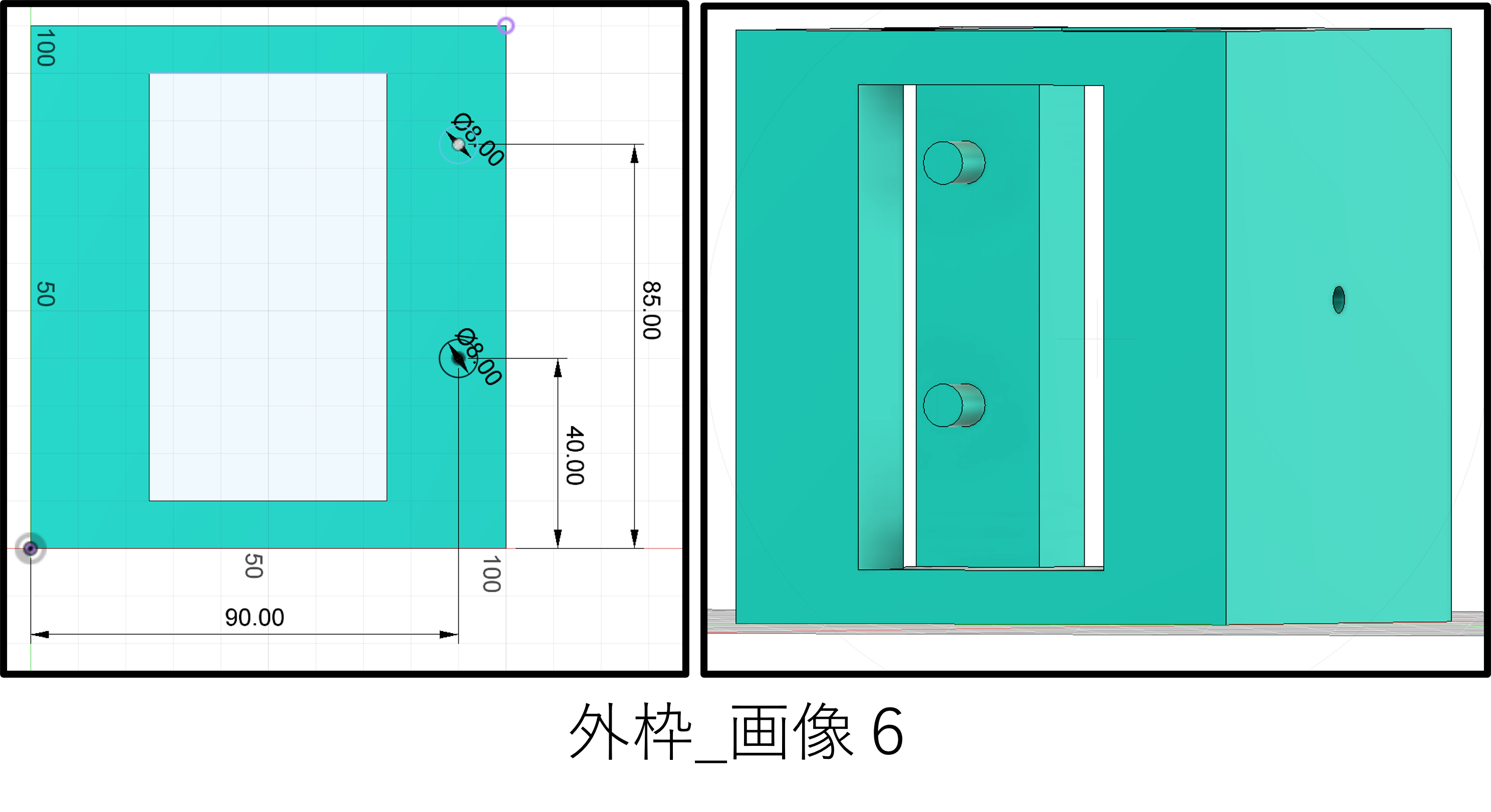
側面(どちらでも可)を選択して、Φ8の円形を2つ描きます。
円形は原点から横90mm , 高さ40mmおよび85mmの位置に作成します。
その後、押し出し[結合]にて反対側に30mm押し出します
(外枠_画像6)。
反対側の側面にも同様の作業を行い、突起を作ります。
※リンクを取り付けるための突起を作成します。
「外枠」~完成~
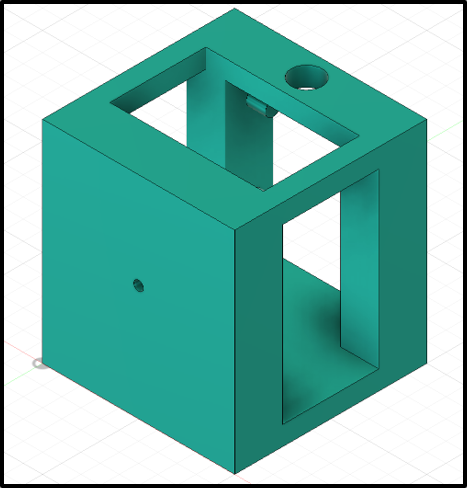
以上で外枠が完成しました!!
上皿の設計
「上皿」~step1~
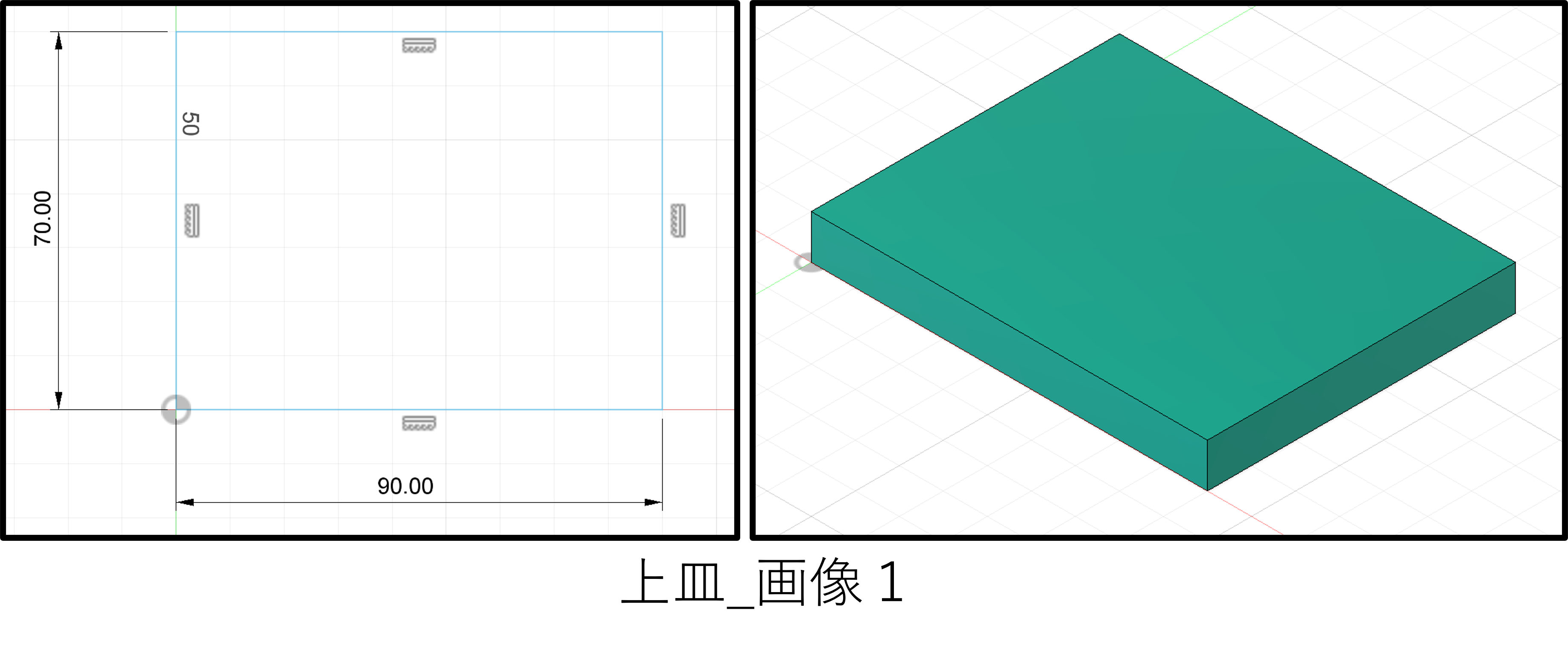
原点から縦70mm、横90mmの長方形を描き、押し出しで高さが10mmの箱を作成します。
「上皿」~step2~
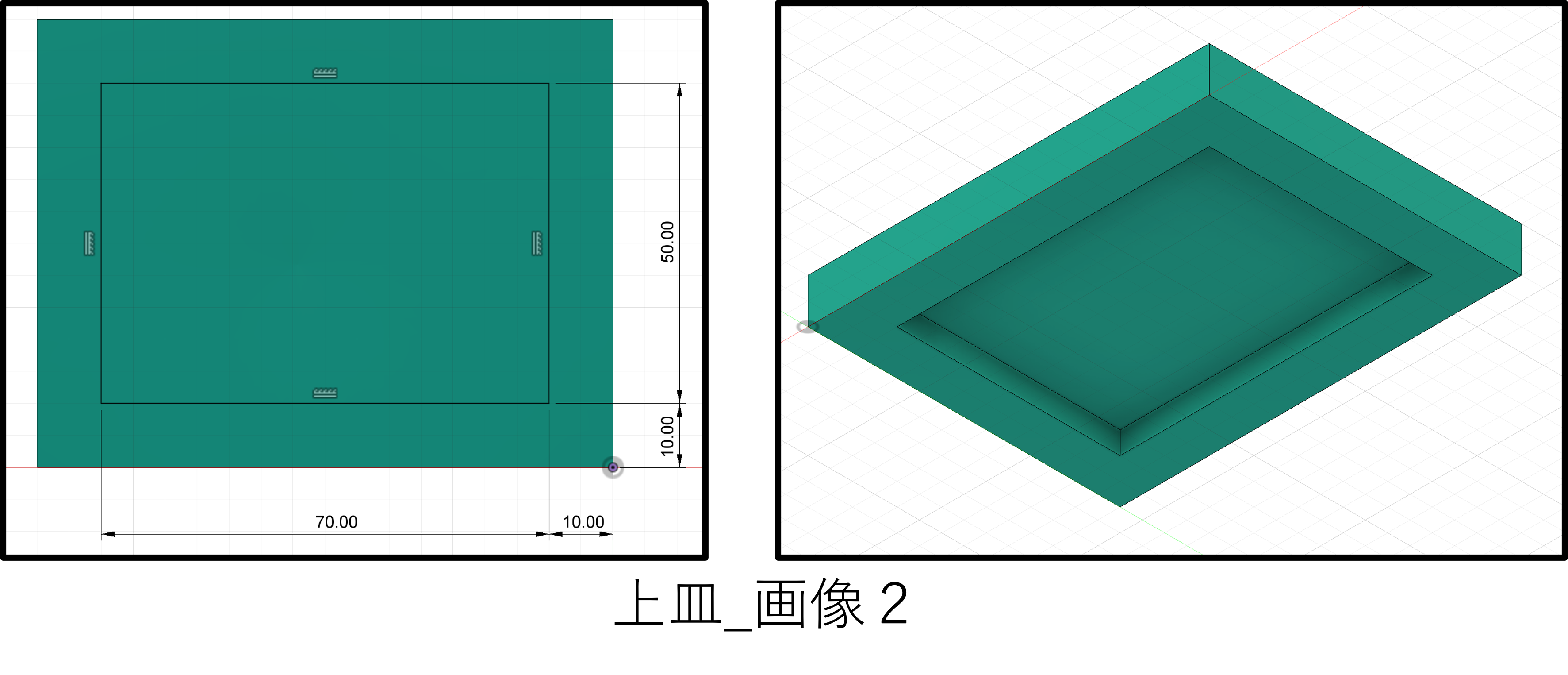
{「上皿」~step1~}で作成した直方体の底面を選択し、縦50mm×横70mmの長方形を描きます。
四角形は縦幅が両側10mm , 横幅が両側10mm残るよう作成します。
その後、押し出し[切り取り]にて上部へ5mm切り取ります。
※量る対象を載せる部分です。
「上皿」~step3~
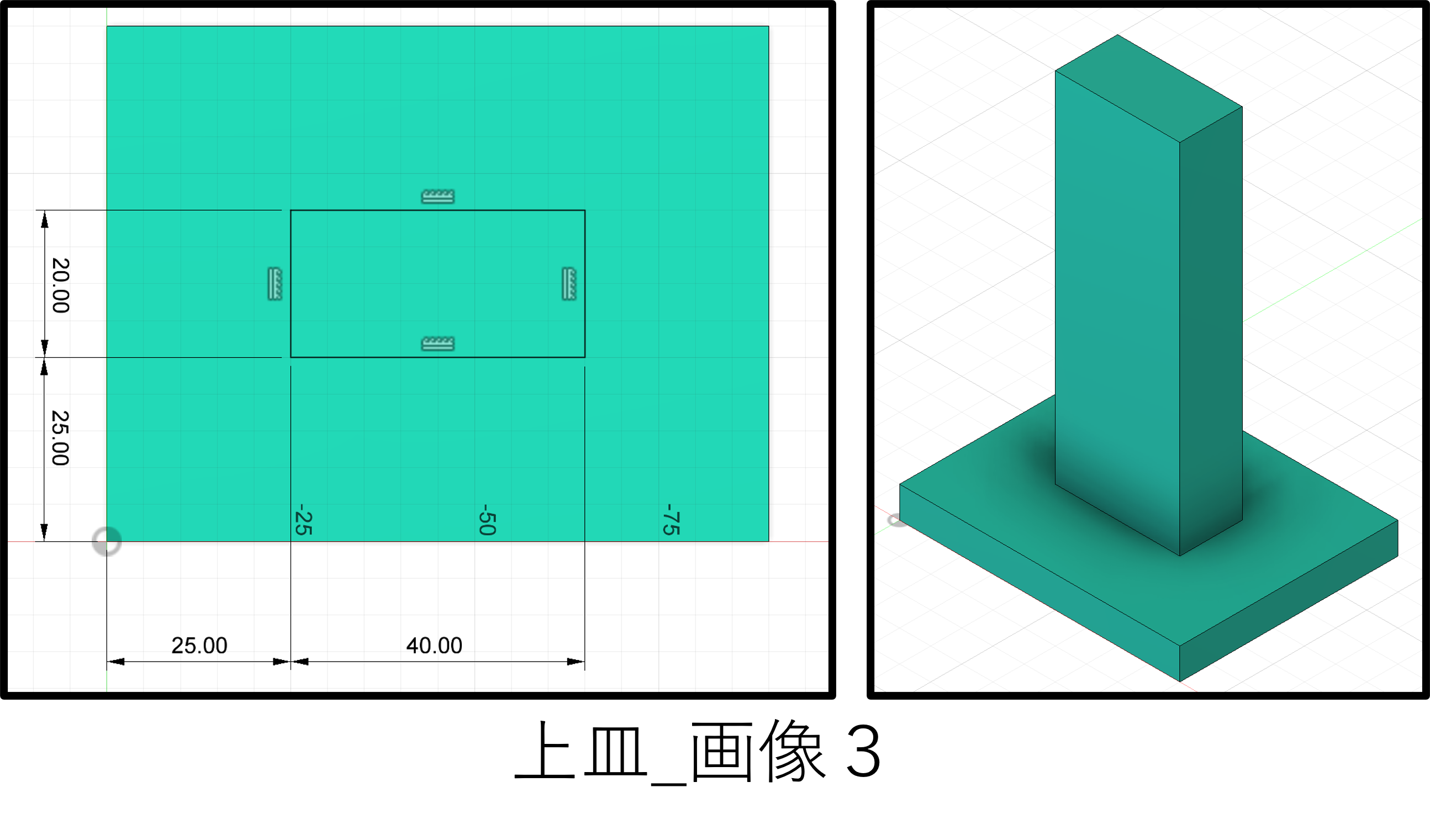
上面を選択して、縦20mm×横40mmの四角形を描きます。
四角形は縦幅が両側25mm , 横幅が両側25mm残るよう作成します。
その後、押し出し[結合]で上部へ115mm押し出します。
「上皿」~step4~
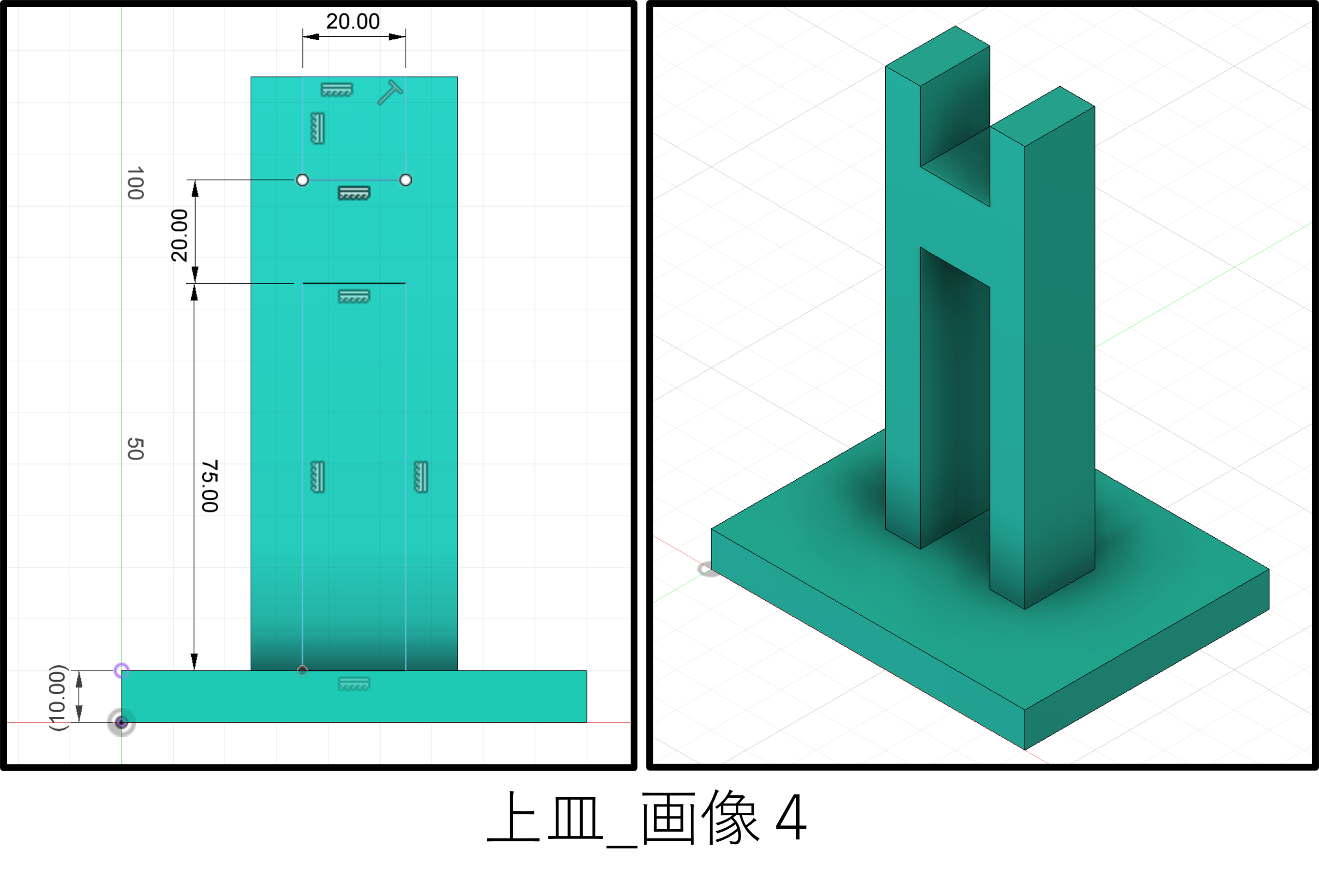
{「上皿」~step3~}で作成した直方体の前面を選択し、
横20mm×高さ75mmの長方形 および
横20mm×高さ20mmの正方形を描きます。
直方体の下線に長方形が,上線に正方形が接触する形でそれぞれ横幅を両側10mm残るよう作成します。
その後、押し出し[切り取り]にて後方へ20mm切り取ります。
「上皿」~step5~
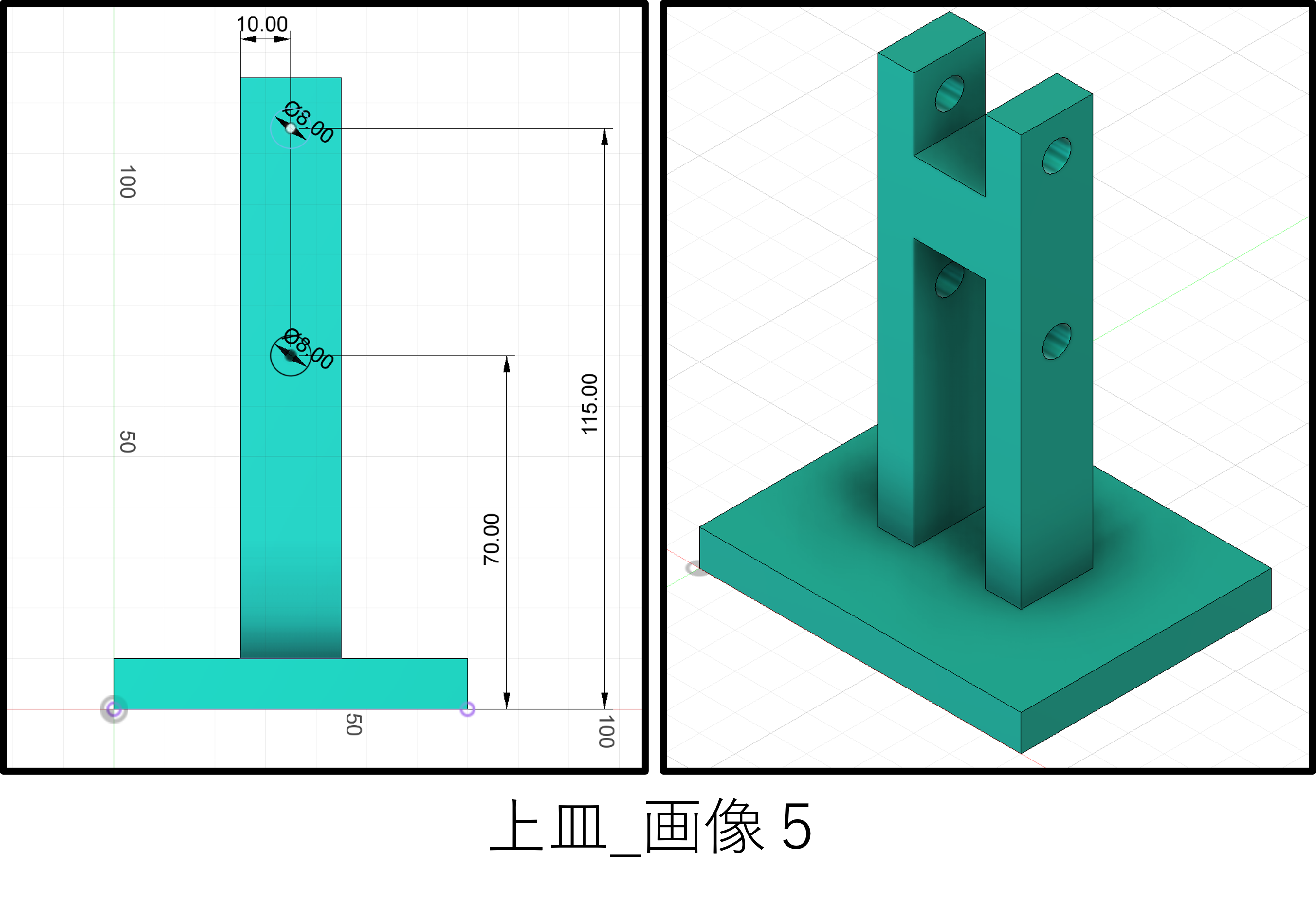
{「上皿」~step3~}で作成した直方体の側面(どちらでも可)を選択し、Φ8の円形を2つ描きます。
円形は幅の中央(10mm) , 最下部から高さ70mmおよび115mmの位置に作成します。
[注]step3の直方体の下部でなく、上皿全体の最下部です。お気を付けください。
その後、押し出し[切り取り]にて反対側へ40mm切り取ります。
※後述のリンクをピンで接合するための穴です。
「上皿」~step6~
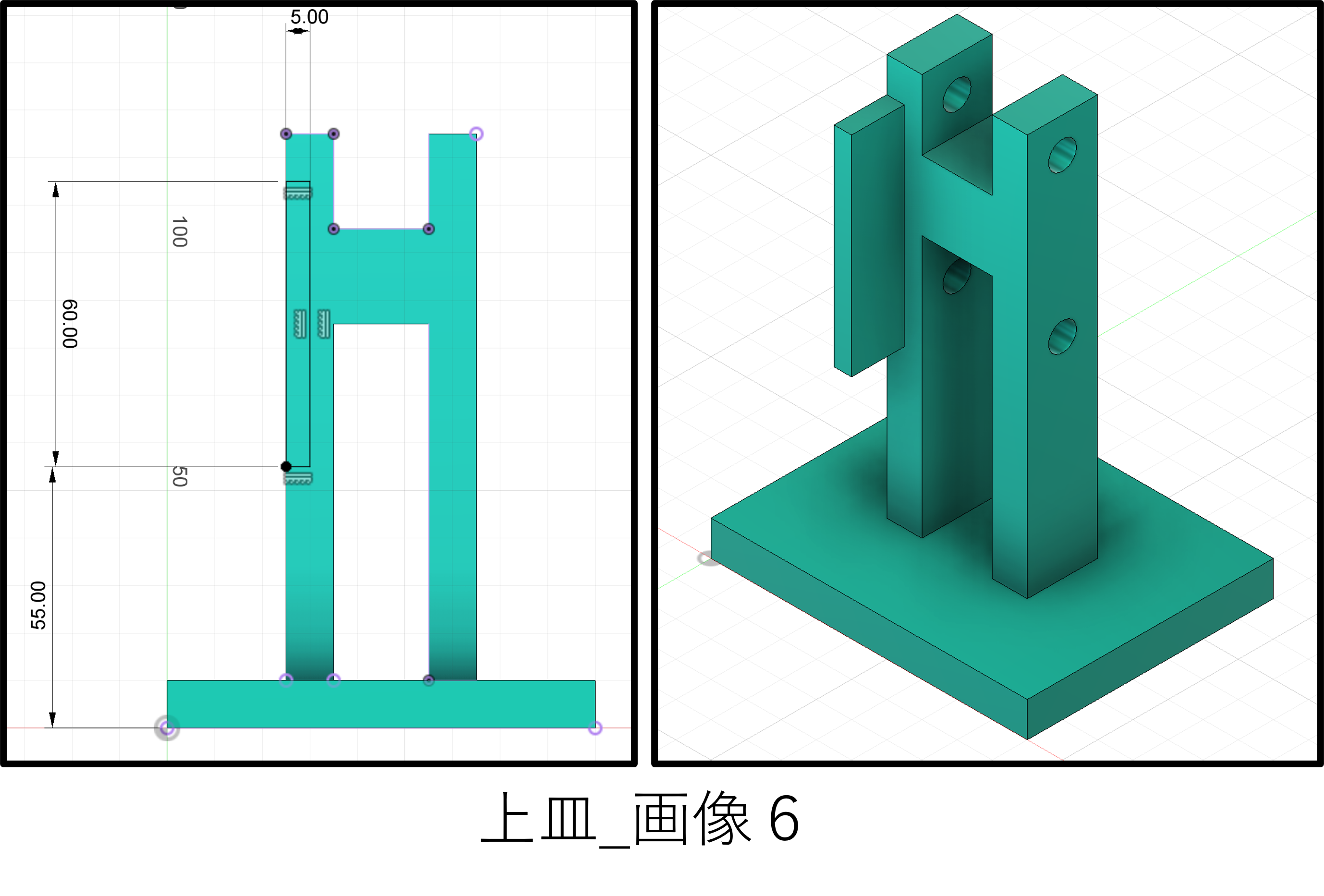
{「上皿」~step3~}で作成した直方体の前面を新たに選択し、横5mm×高さ60mmの長方形を描きます。
直方体の左端と長方形の左端が重なる形で、最下部から高さ55mmの位置に作成します。
[注]step3の直方体の下部でなく、上皿全体の最下部です。お気を付けください。
その後、押し出し[結合]で前方へ20mm押し出します。
「上皿」~step7~
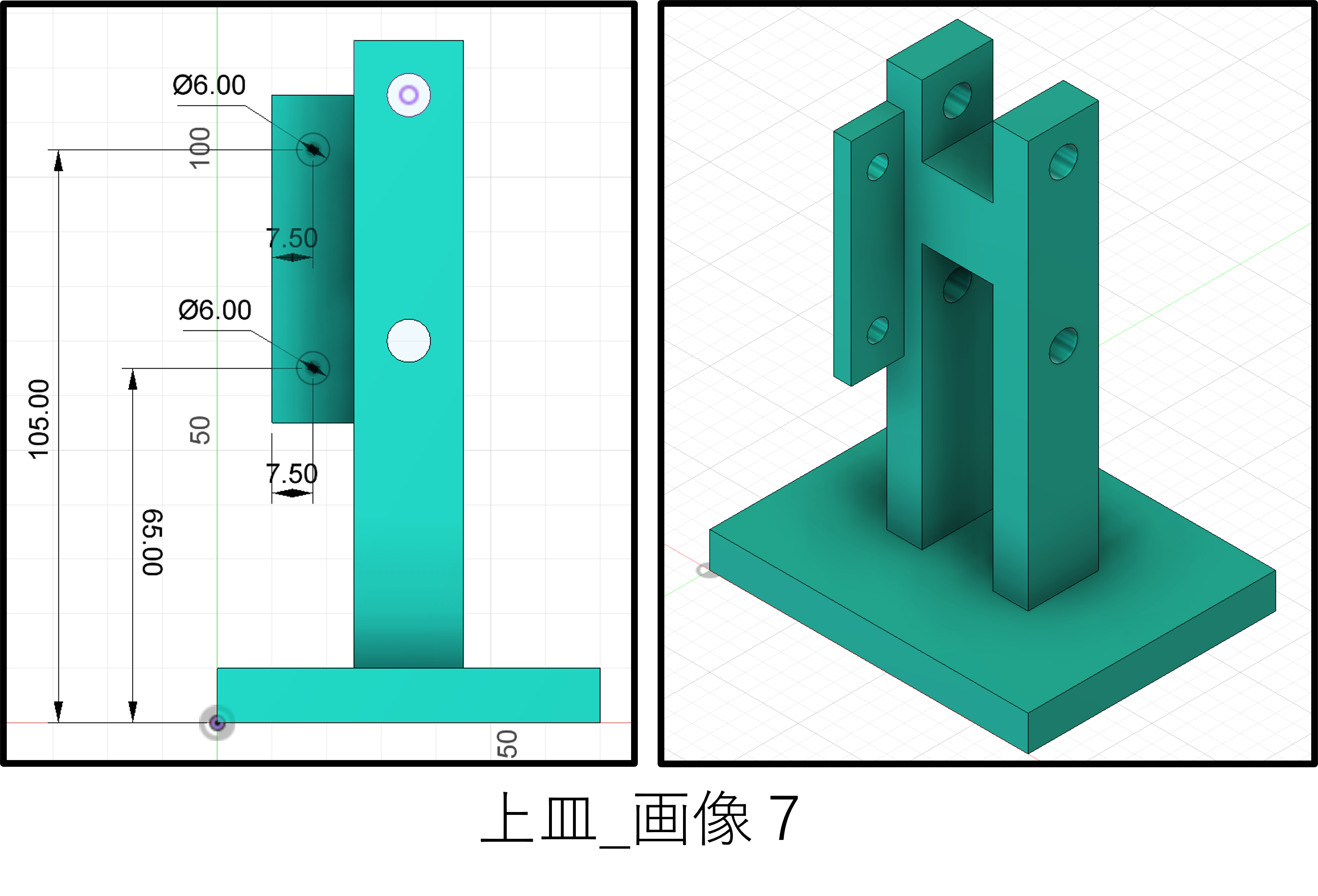
{「上皿」~step6~}で作成した直方体の側面(どちらでも可)を選択し、Φ6の円形を2つ描きます。
円形は幅の中央(7.5mm) , 最下部から高さ65mmおよび105mmの位置に作成します。
[注]step6の直方体の下部でなく、上皿全体の最下部です。お気を付けください。
その後、押し出し[切り取り]にて反対側へ5mm切り取ります。
※後述する平歯車を取り付けるための機構です。
「上皿」~step8~
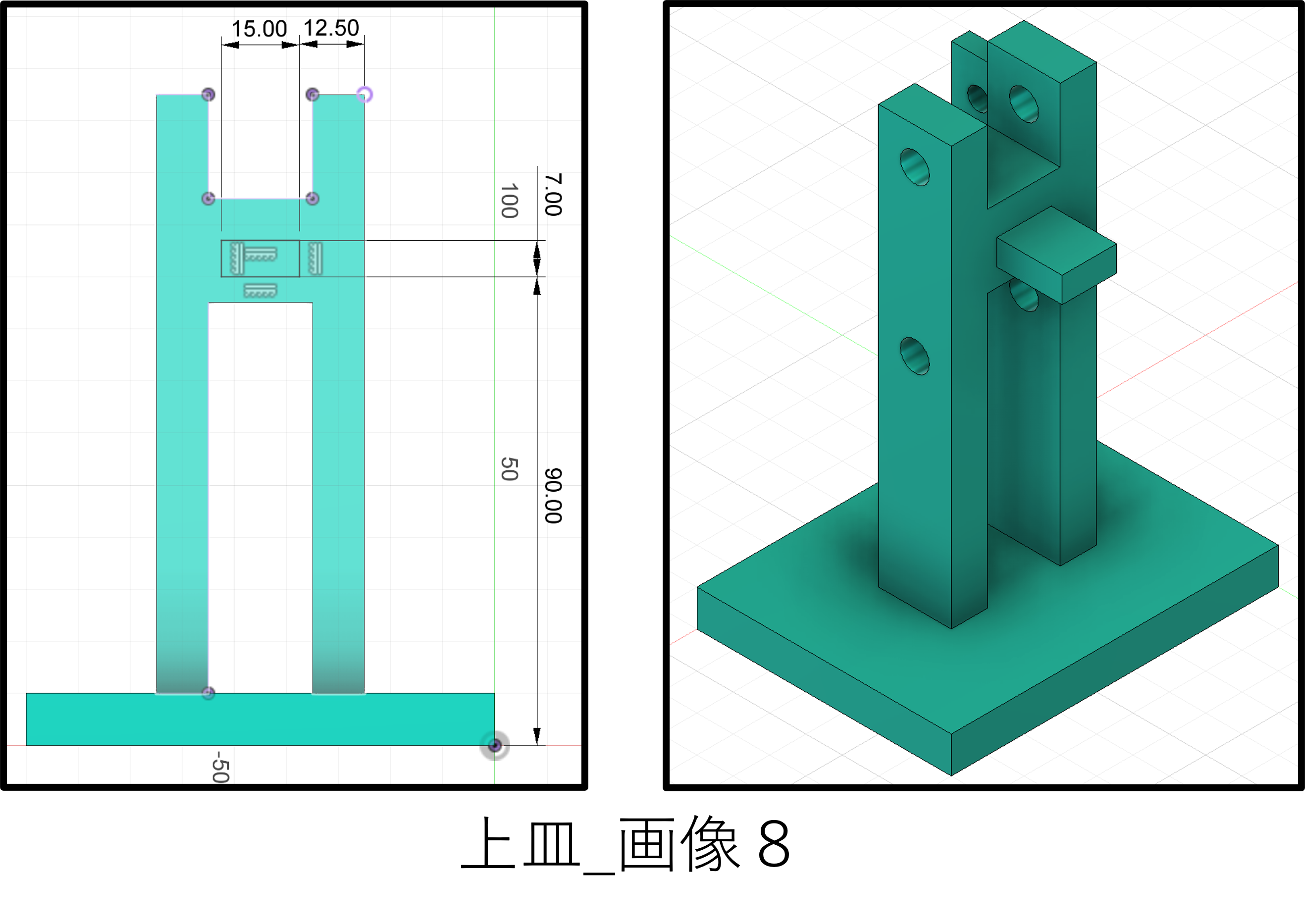
{「上皿」~step3~}で作成した直方体の後面を新たに選択し、横15mm×高さ7mmの長方形を描きます。
横幅が両側12.50mm 残るよう,かつ, 最下部から高さ90mmの位置に作成します。
[注]step3の直方体の下部でなく、上皿全体の最下部です。お気を付けください。
その後、押し出し[結合]で後方へ18mm押し出します。
「上皿」~step9~
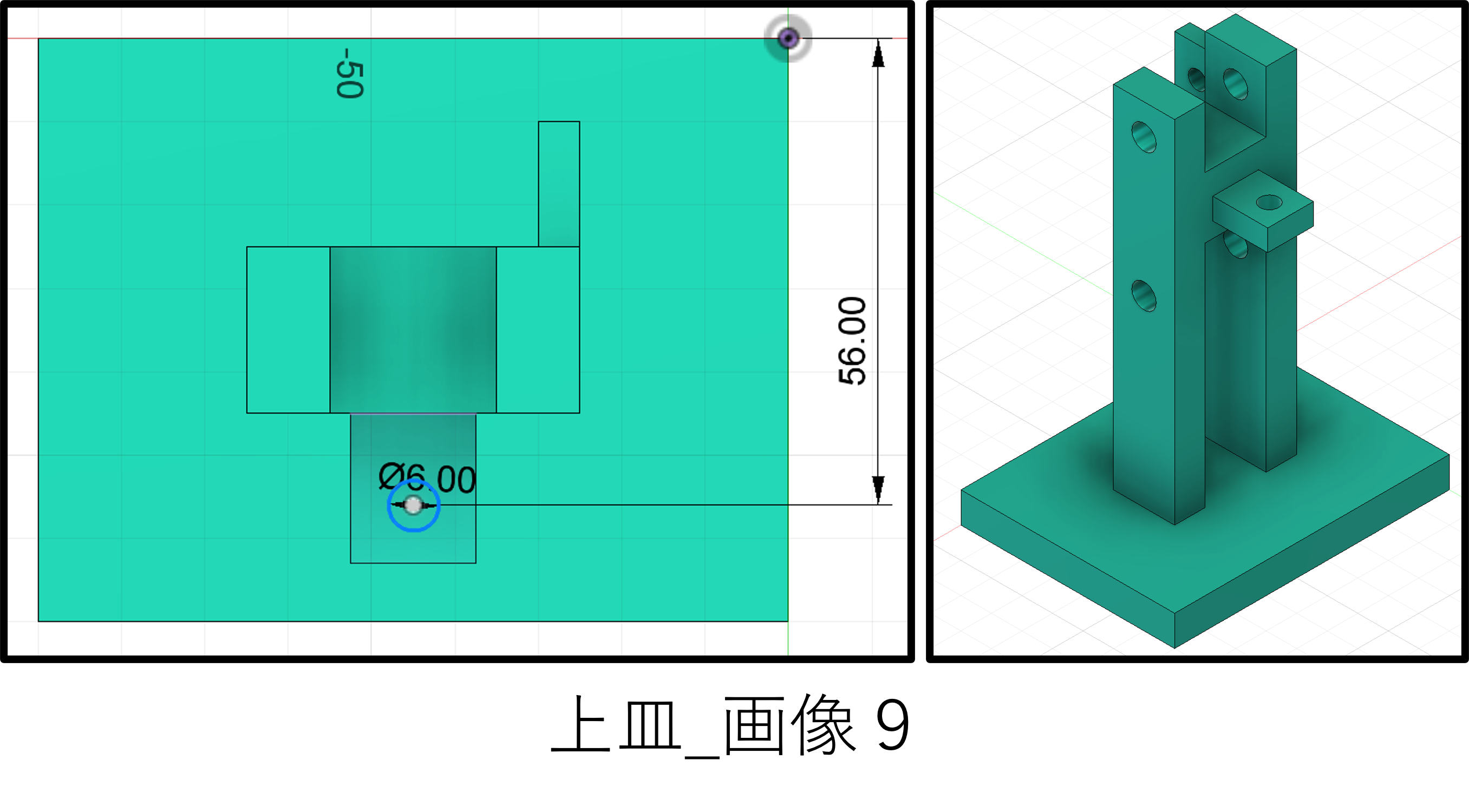
{「上皿」~step8~}で作成した直方体の上面を選択し、Φ6の円形を描きます。
円形は幅の中央(7.5mm) , 原点から縦56mmの位置に作成します。
[注]step8の直方体の角でなく、上皿を描き始めた際の原点です。お気を付けください。
その後、押し出し[切り取り]にて下側へ7mm切り取ります。
※実際に3Dプリンターで印刷した際はばねを装着します。
「上皿」~完成~
以上で上皿が完成しました!!
「リンク」
「リンク」~step1~
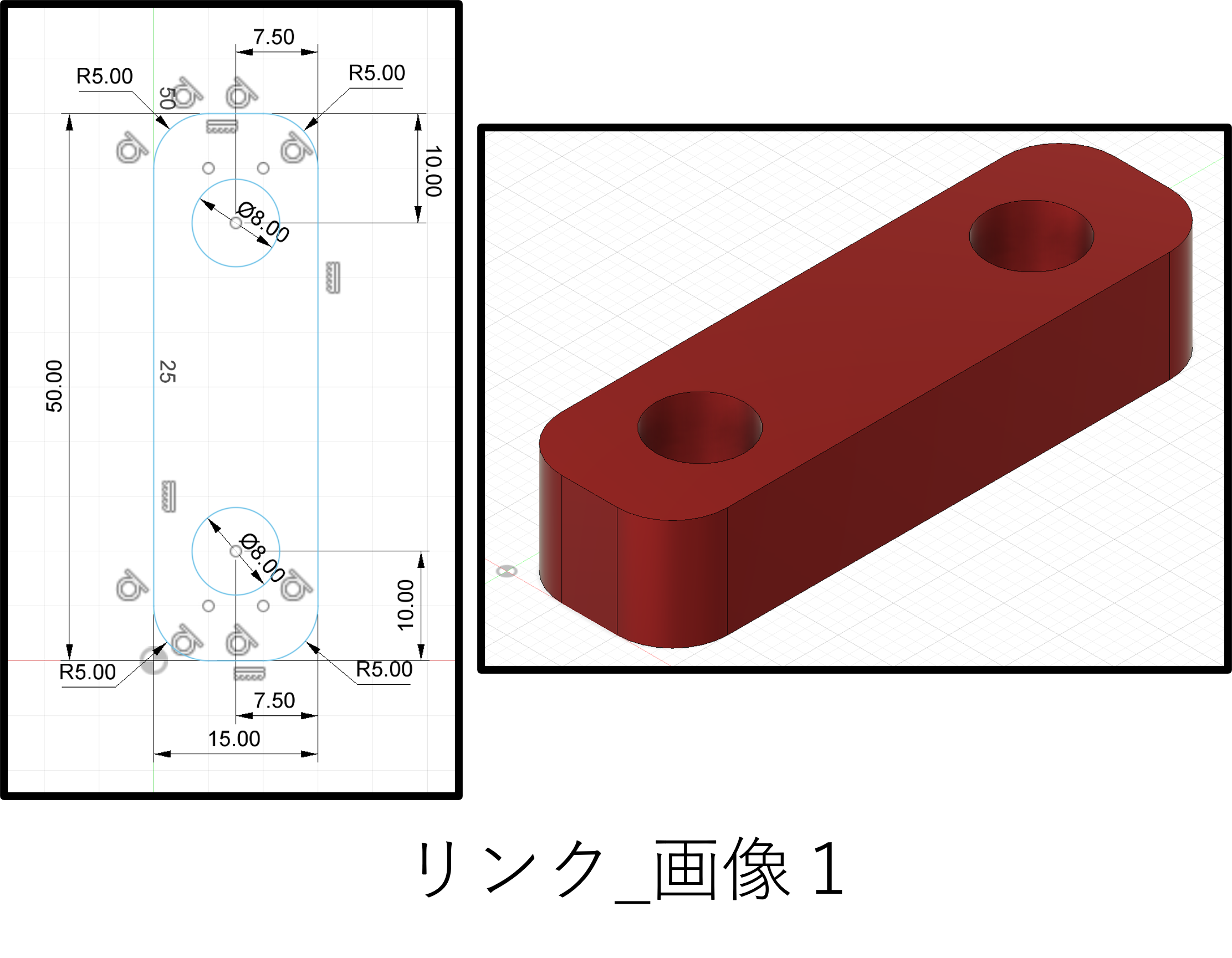
原点から縦50mm、横15mmの長方形を描き、四つ角をフィレット(R5)にします。
Φ8の円形を上線および下線から各10mm,幅7.5mmの位置に描きます。
穴以外を選択し、押し出しで高さが10mmのリンクを作成します。
リンクは以上で完成ですが、4つ使用するため同じ作業を4回行ってください。
上皿とリンクを繋ぐ「ピン」
「ピン」~step1~
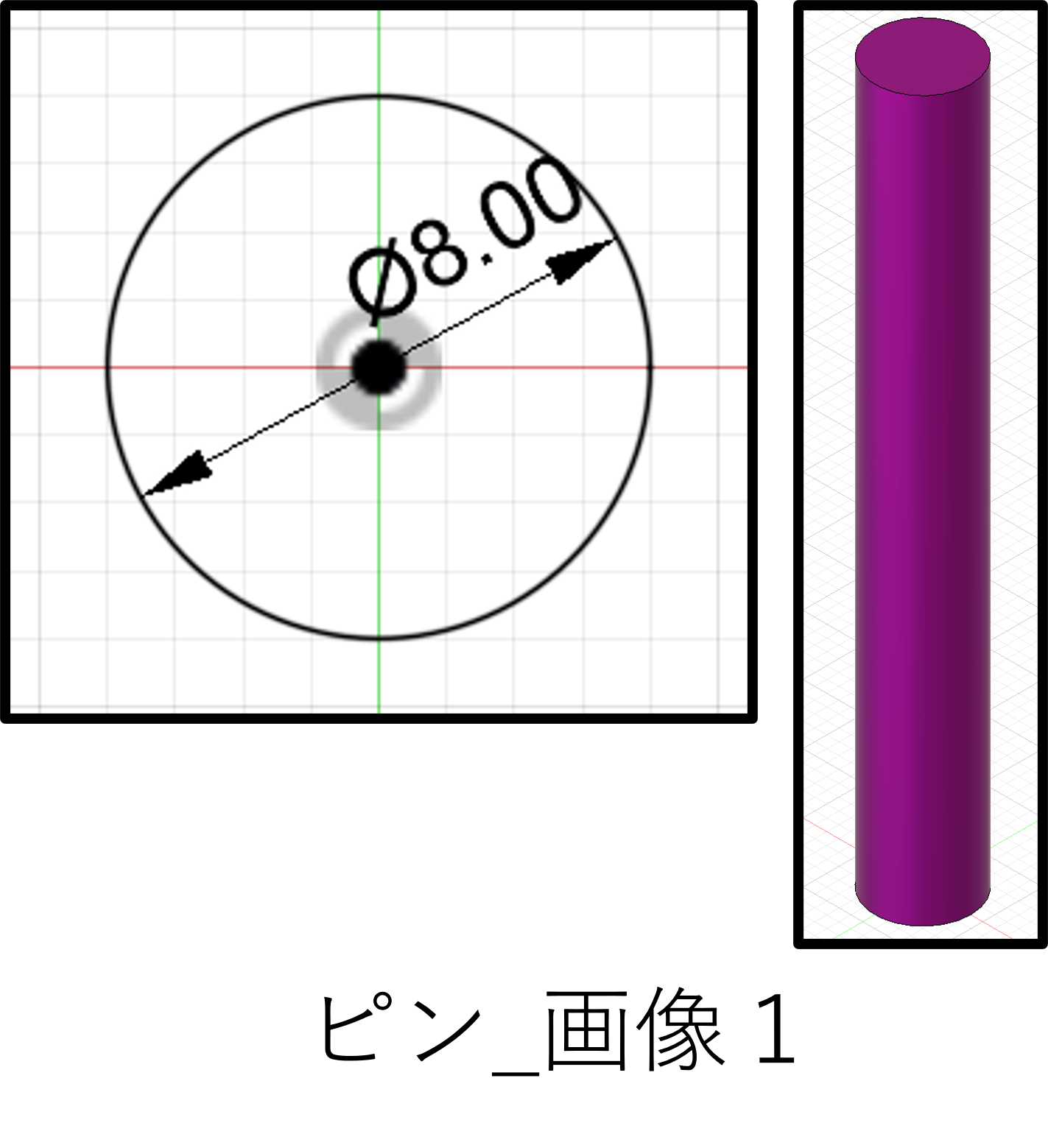
Φ8の円形を描き、60mmの押し出しを行います。
ピンは以上で完成ですが、2つ使用するため同じ作業を2回行ってください。
※上皿とリンクを繋ぐための部品です。
「回転軸」
「回転軸」~step1~
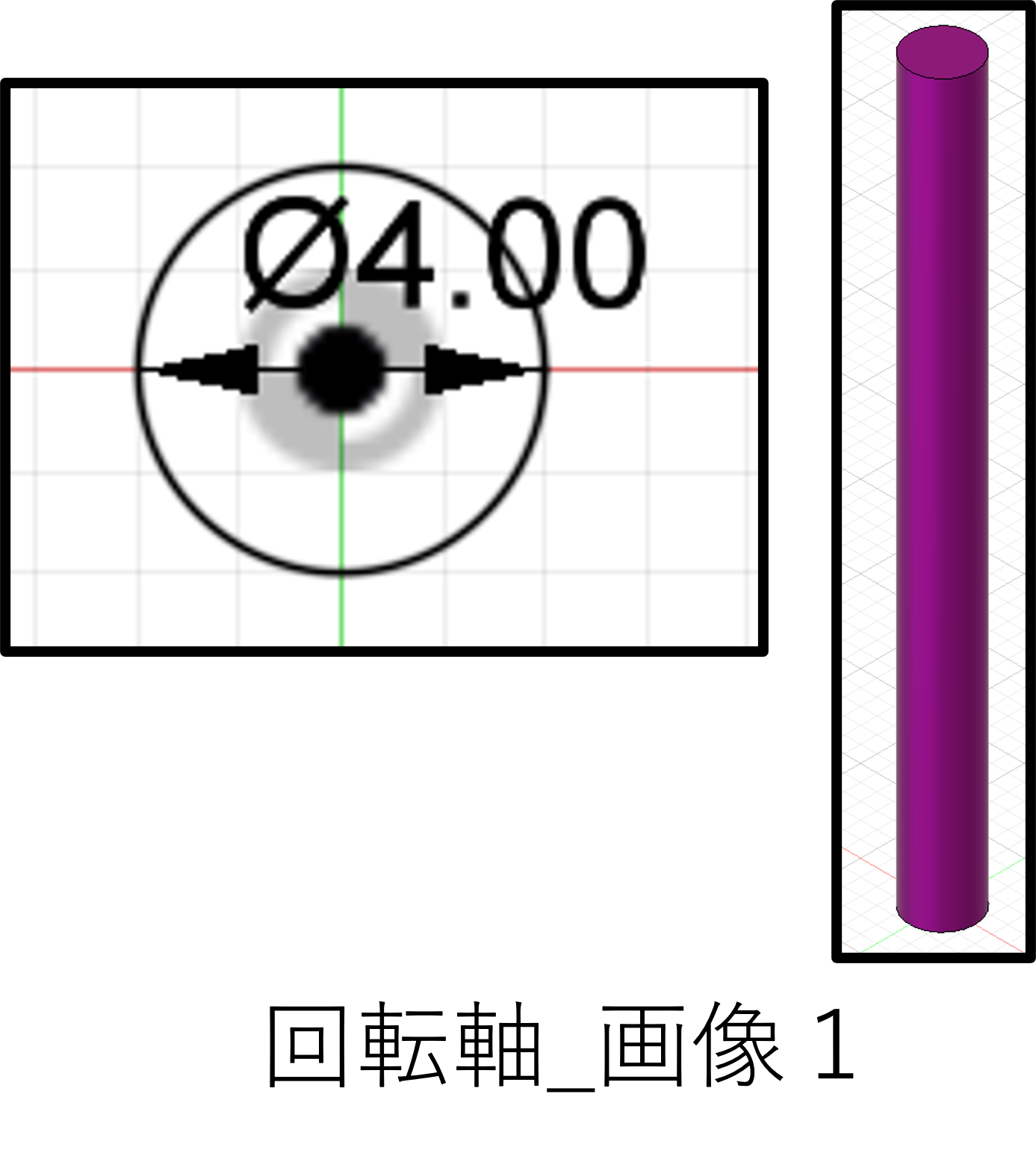
Φ4の円形を描き、45mmの押し出しを行います。
「回転軸」~step2~
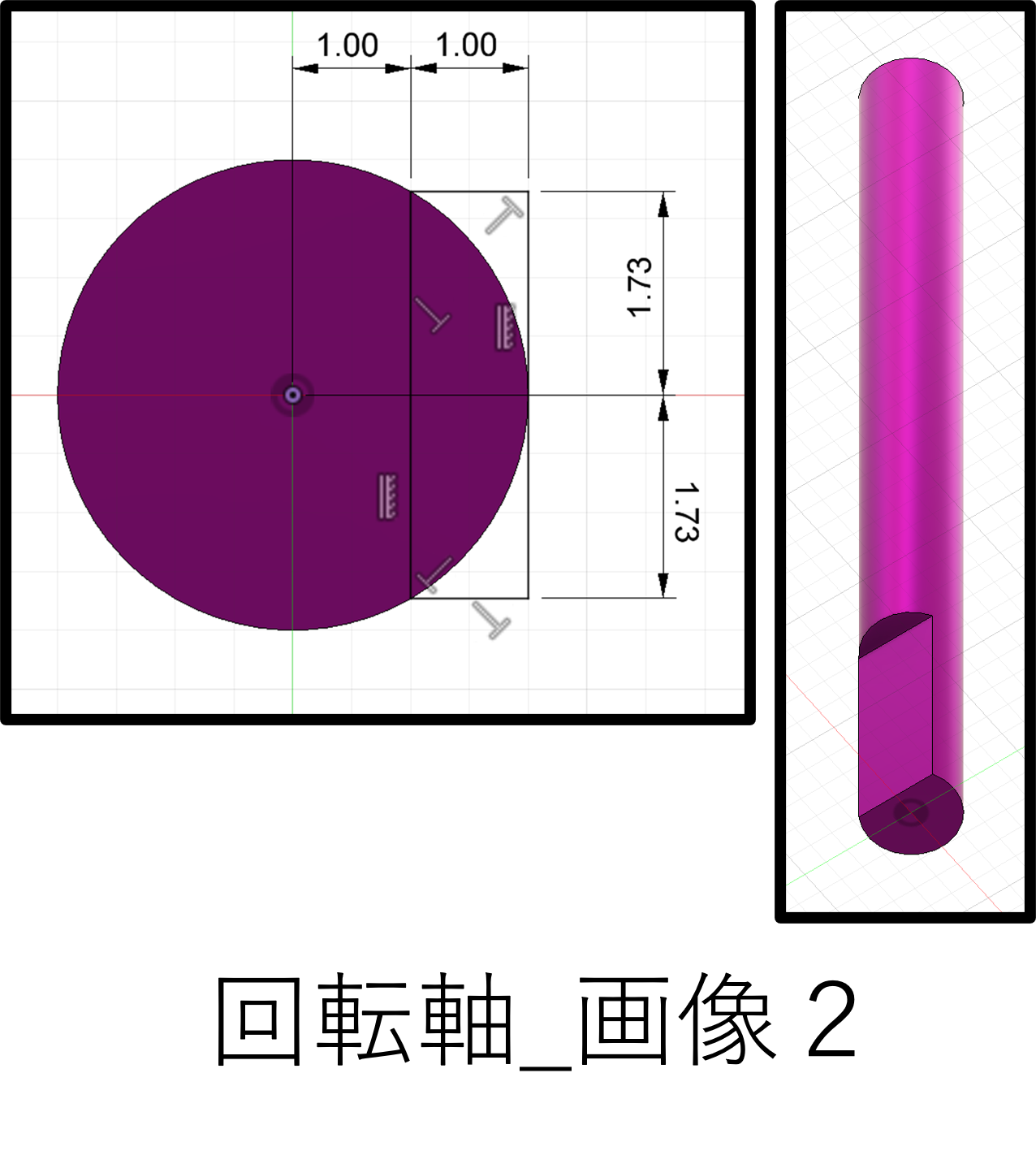
下面を選択し、縦3.46mm×横1mmの長方形を「円形の右端と長方形の右線中央が重なる位置」で描きます(一部がDのような形状になるよう作ります)。
押し出し[切り取り]で上部に10mm切り取ります。
「回転軸」~step3~
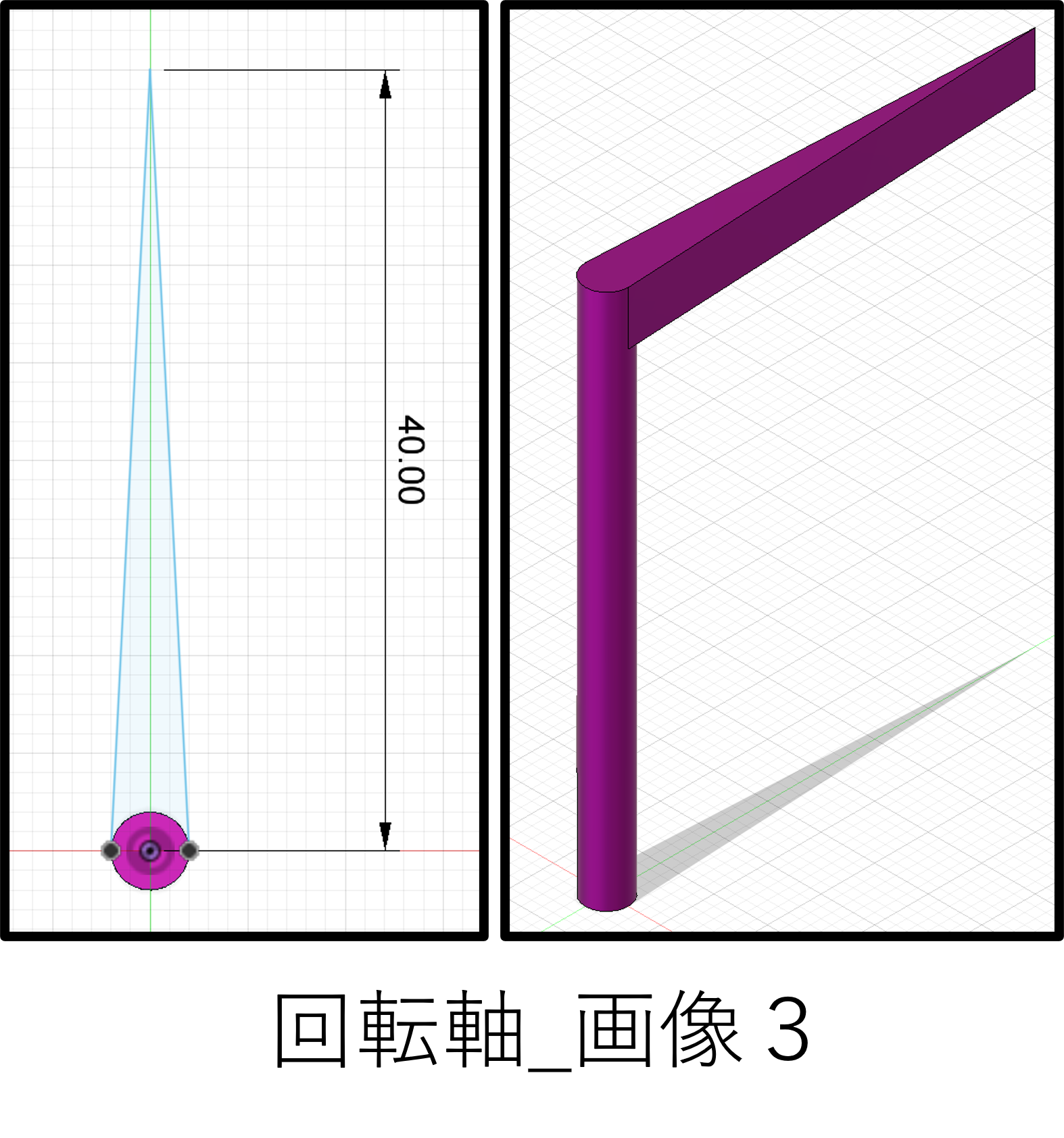
上面を選択し、図のように縦40mmの位置から円形に接線を2本描きます。
【先ほどのキー溝構造をに西方向へ向け、北方向に縦40mmの位置と捉えてください】
押し出し[結合]で接線+線形で囲まれた面を上部に5mm切り取ります。
回転軸は以上で完成です。
「歯車(回転軸側)」
「歯車(回転軸側)」~step1~
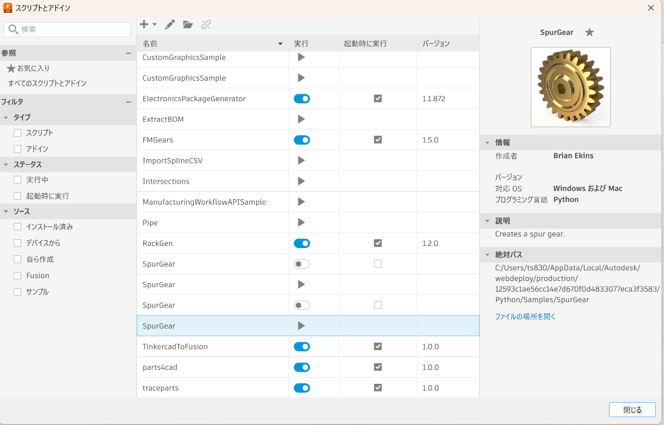
デザインの「ユーティリティ」タブより、「アドイン」から「スクリプトとアドイン」を開いてください。
使用できる「スクリプト」と「アドイン」が表示されるので、「SuperGear」の▶を押してください。
「歯車(回転軸側)」~step2~
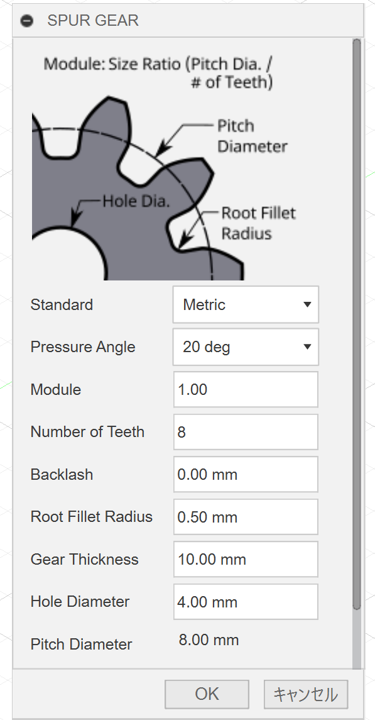
以下の寸法で歯車を生成してください。
圧力角:20°
モジュール:1
歯数:8
バックラッシ:0
フィレット半径:0.5
歯車厚さ:10
軸直径:4
ピッチ円直径:8
「歯車(回転軸側)」~step3~
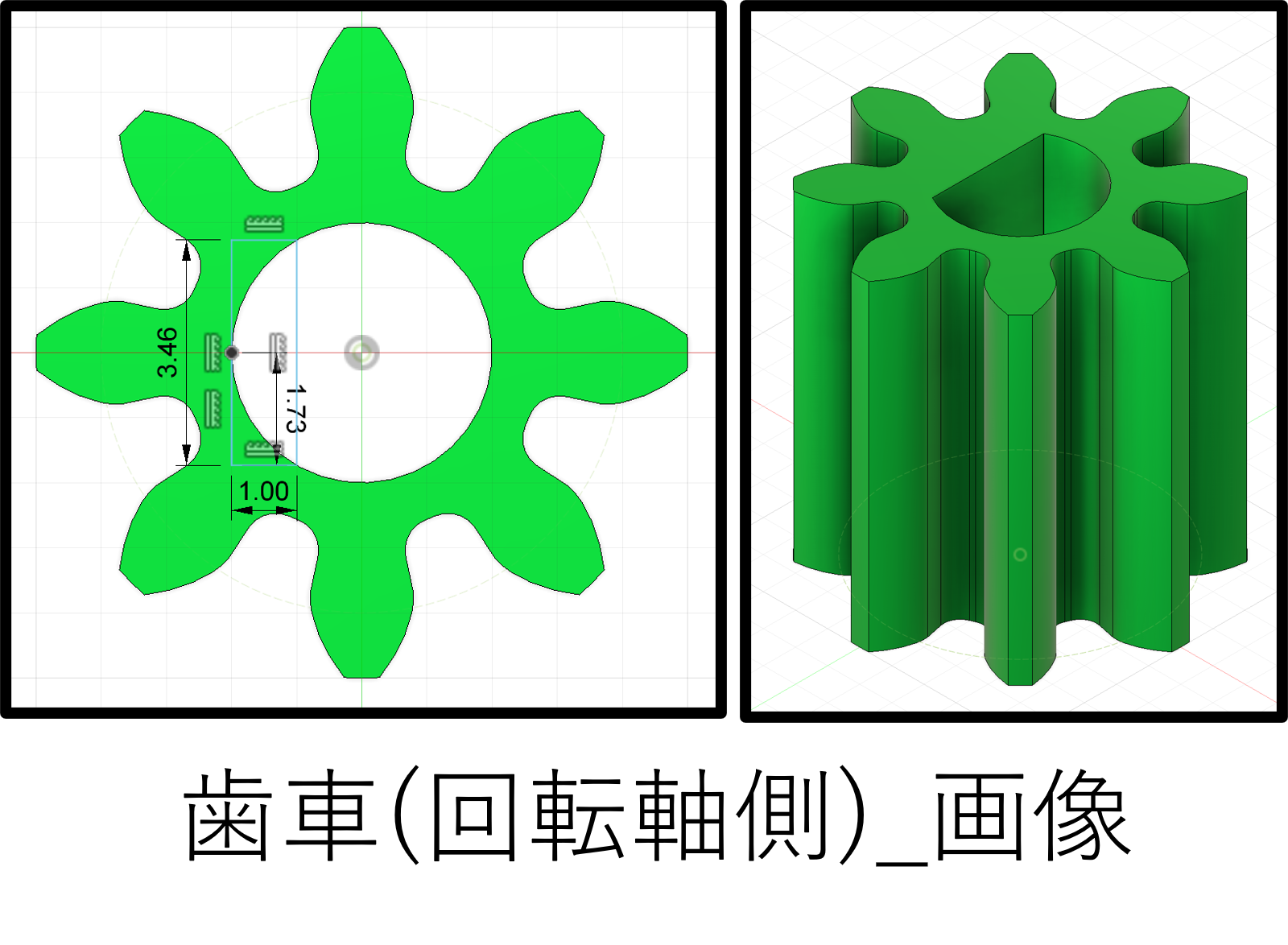
生成した歯車の軸穴に加工を足すことで前述の「回転軸」に回転を与えられるようにします。
歯車上面を選択し、縦3.46mm×横1mmの長方形を「円形の左端と長方形の左線中央が重なる位置」で描きます(Dのような形状を作ります)。
押し出し[結合]で下部に10mm押し出します(切り取りと間違えないよう気を付けてください)。
歯車(回転軸側)は以上で完成です。
「歯車(上皿側)」
上皿に設置し動きを回転軸側へ伝達するための「歯車」を作成します。
こちらは、ラックギアの役割を果たします。
※作成には「アドイン」に「FMGears」をダウンロード・使用しています。
ダウンロード
「歯車(上皿側)」~step1~
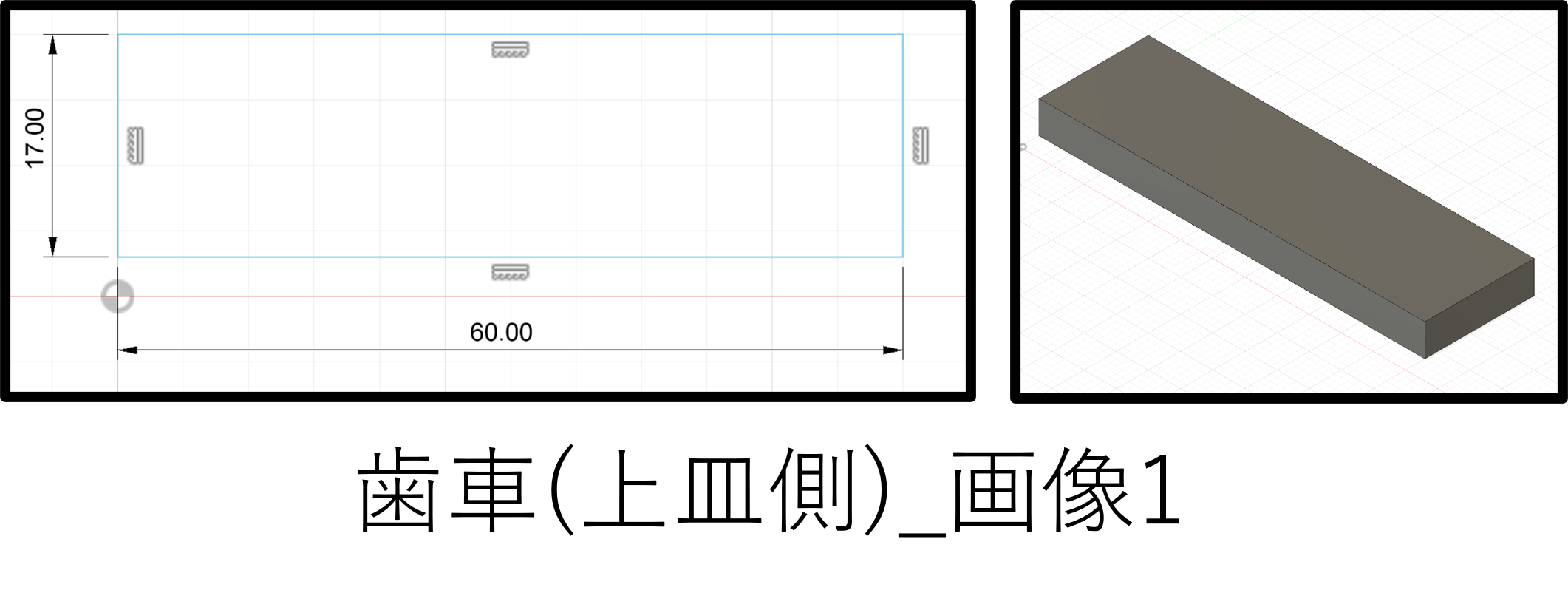
事前に土台として、縦17mm、横60mmの長方形を描き、押し出しで高さが10mmの箱を作成します。
「歯車(上皿側)」~step2~
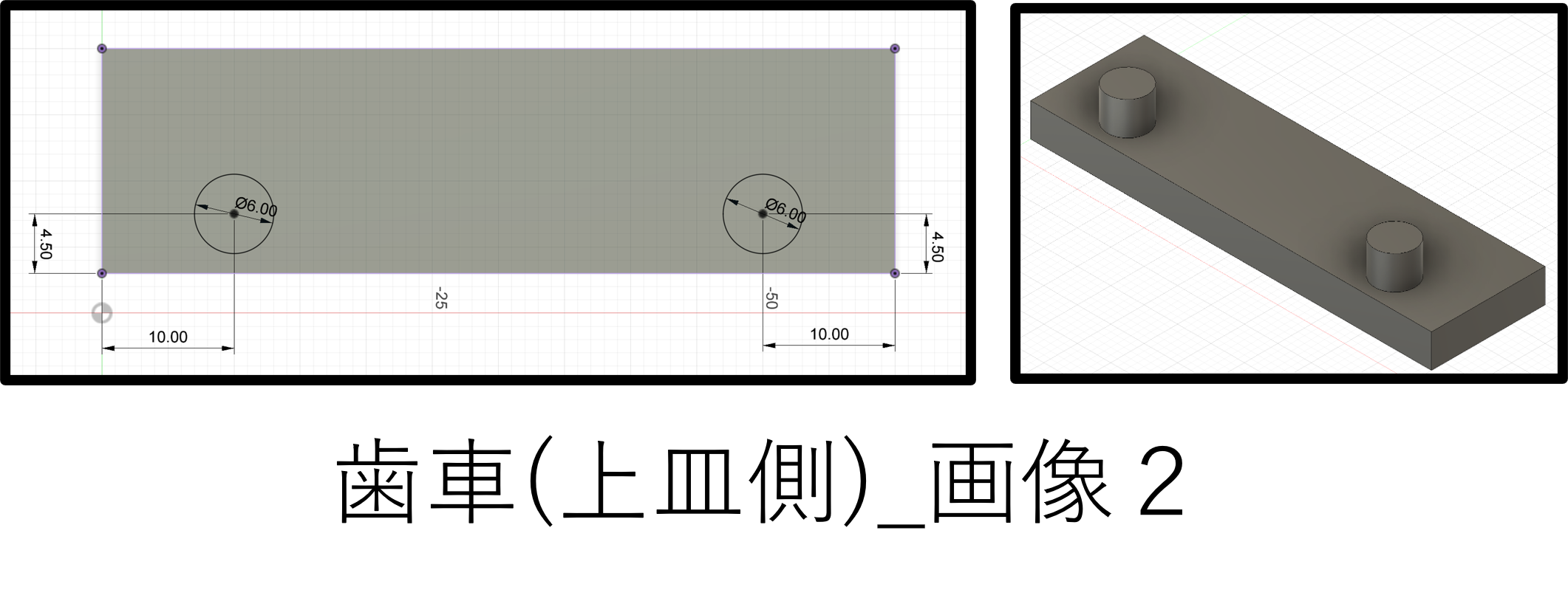
上面を選択して、Φ6の円形を2つ描きます。
円形は原点から縦4.5mm , 横が両端から10mmの位置に作成します。
その後、押し出し[結合]にて上側に5mm押し出します。
「歯車(上皿側)」~step3~
.png)
ラックギアを作成します。
「アドイン」に「FMGears」をダウンロードしてください。
※Fusion App Storeにてダウンロードできます。
デザインの「ソリッド」の「作成」内に、「FM Gears」が追加されるのでクリックしてください。
以下の寸法で歯車を生成してください。
歯車高さ:17
ピッチ円直径:16
圧力角:20°
モジュール:1
歯数:20
フィレット半径:0.4
クリアランス:0.125
歯車厚さ:5
基準:Metric[ミリメートル]
「歯車(上皿側)」~step4~
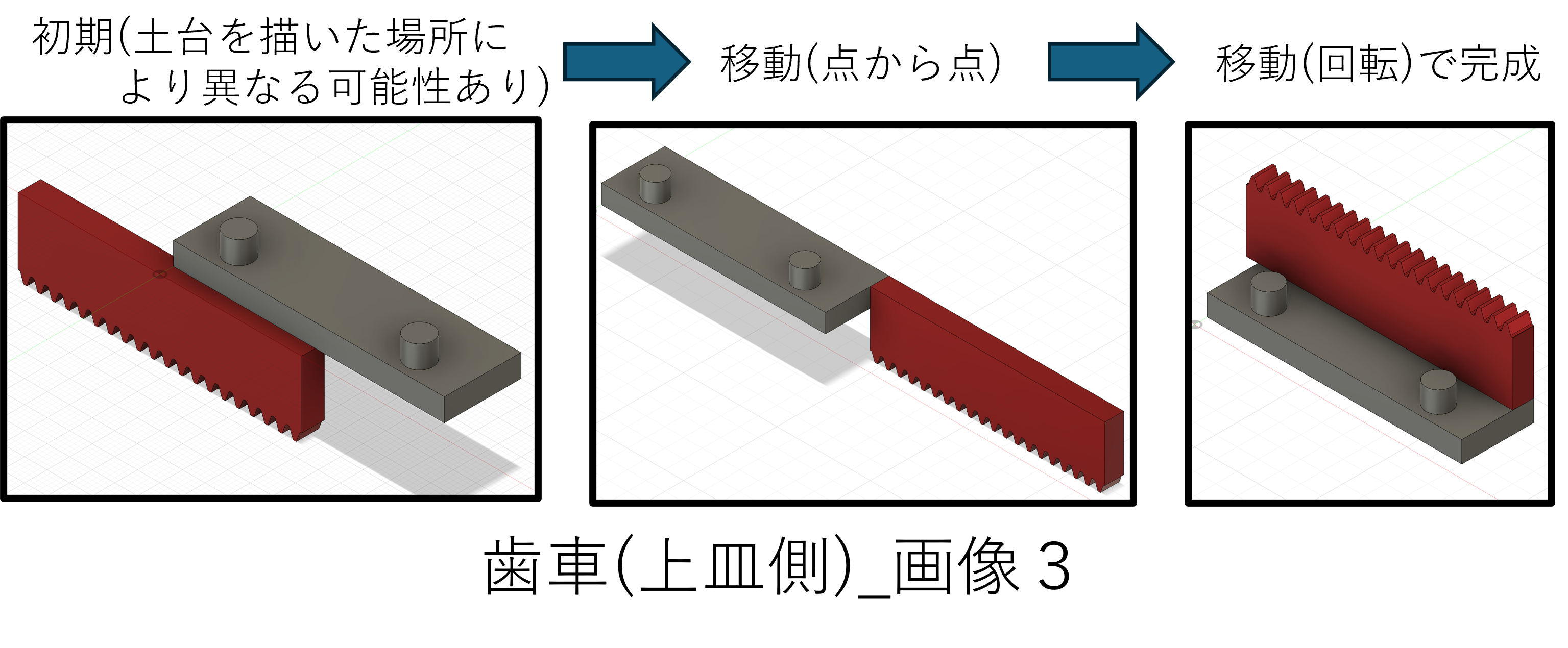
製作したラックギアを土台の上側かつ奥側に移動で乗せてください。
移動の「点と点」で角に移動⇒移動の回転で180°回して位置合わせ、で行いました。
手順と異なった場合は、各移動の手法で画像のように乗せてください。
「歯車(回転軸側)」~step5~
デザインの「ソリッド」にある「結合」を作成物全体を選択した状態で行います。
※これで、土台とラックギアが1つの部品に結合されます。
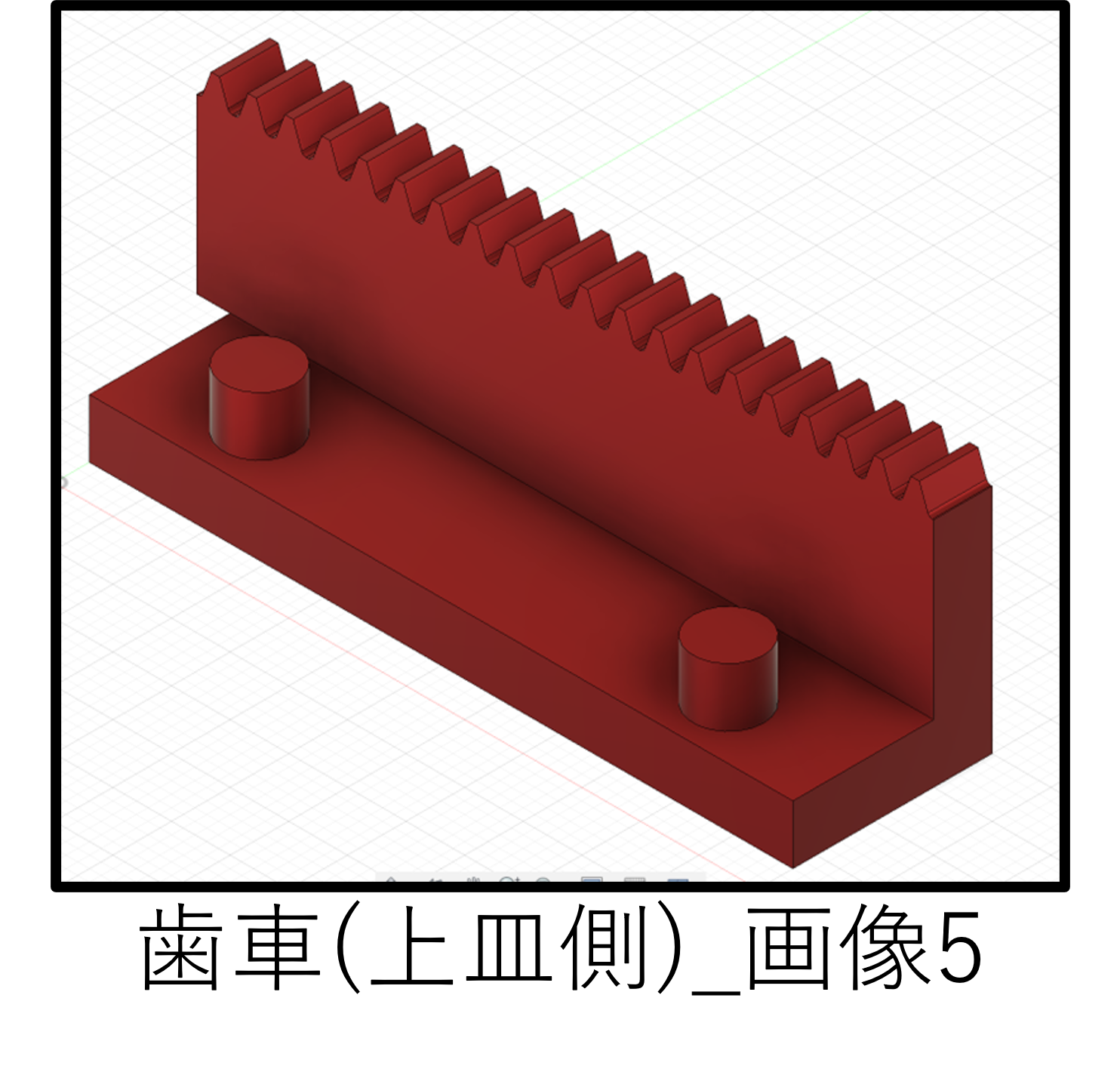
「歯車(上皿側)」~step6~
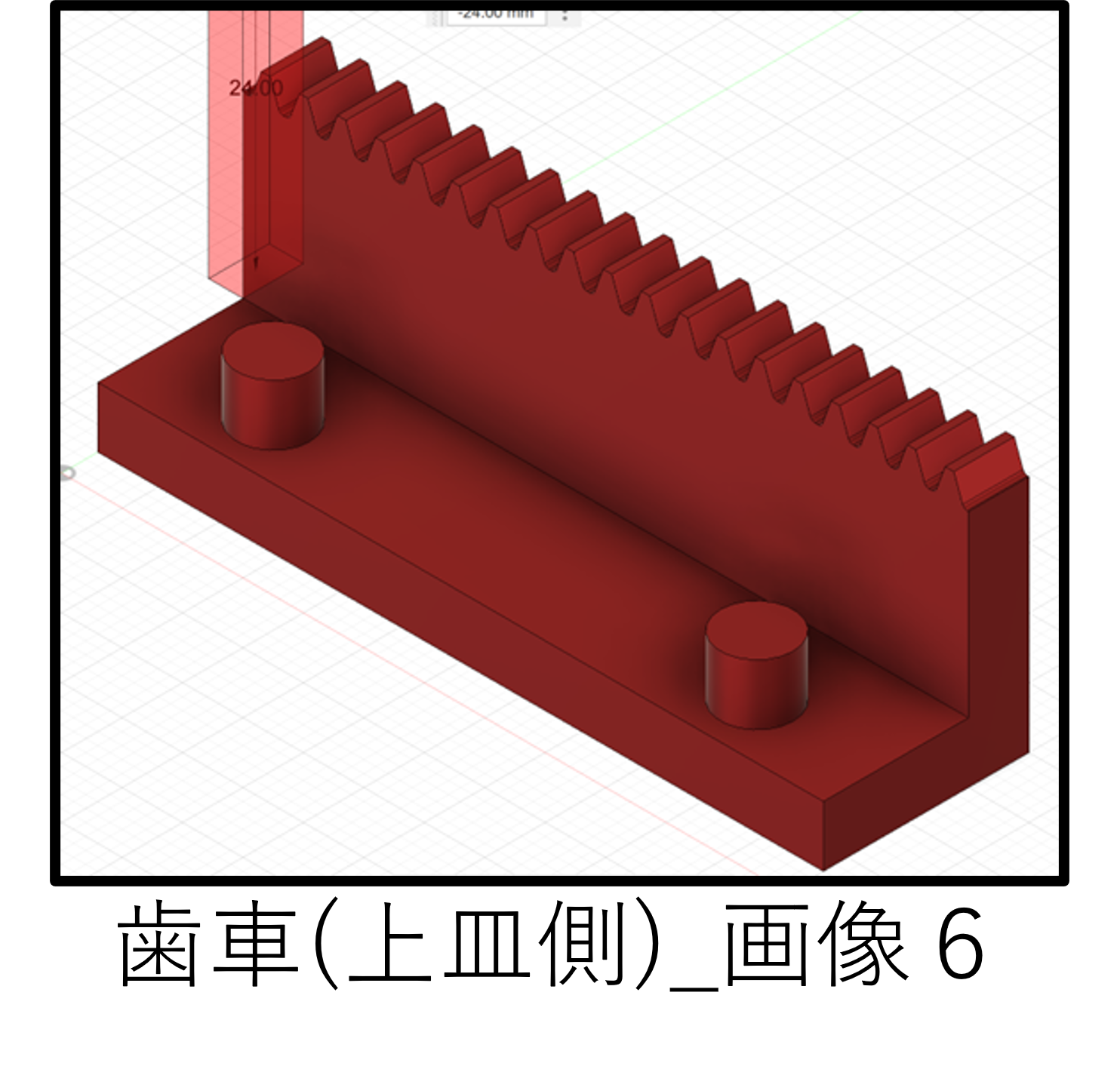
ラックギアの飛び出た部分を削除します。
飛び出た部分の下面(四角形)を選択し、押し出し[切り取り]で上まで切り取ります。
歯車(上皿側)は以上で完成です。
「おねじ(ばね用)」
「おねじ(ばね用)」~step1~
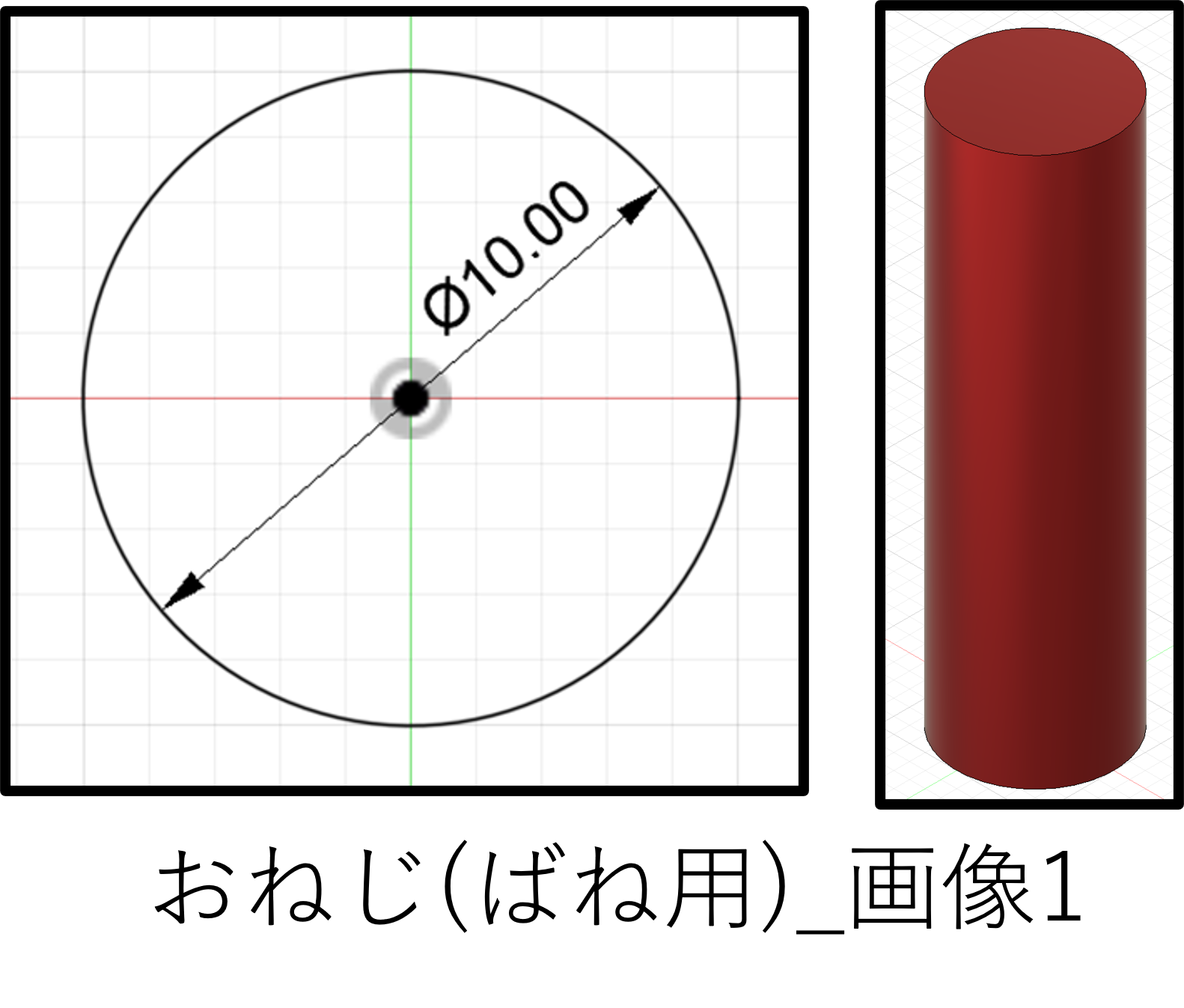
原点中心にΦ10の円形を描き、35mmの押し出しを行います。
「おねじ(ばね用)」~step2~
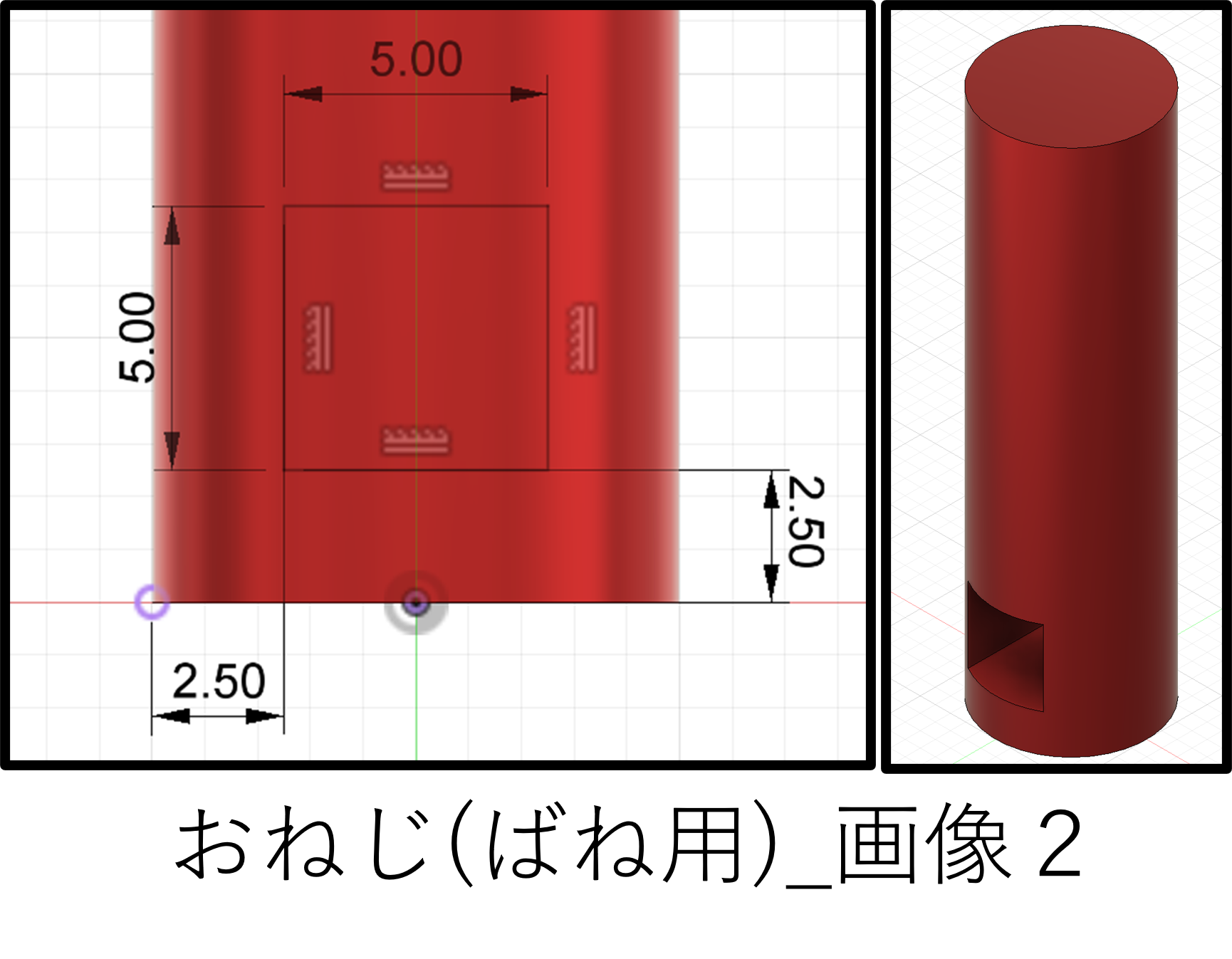
ばねを取り付ける部分を切り抜きます。
xz面 (or yz面)を新たなスケッチとして選択し、原点から高さ5mmの位置に正方形の中心が来るように、5×5の正方形を描きます。
押し出し[切り取り]にて、方向を両側にして貫通穴を作成します。
「おねじ(ばね用)」~step3~
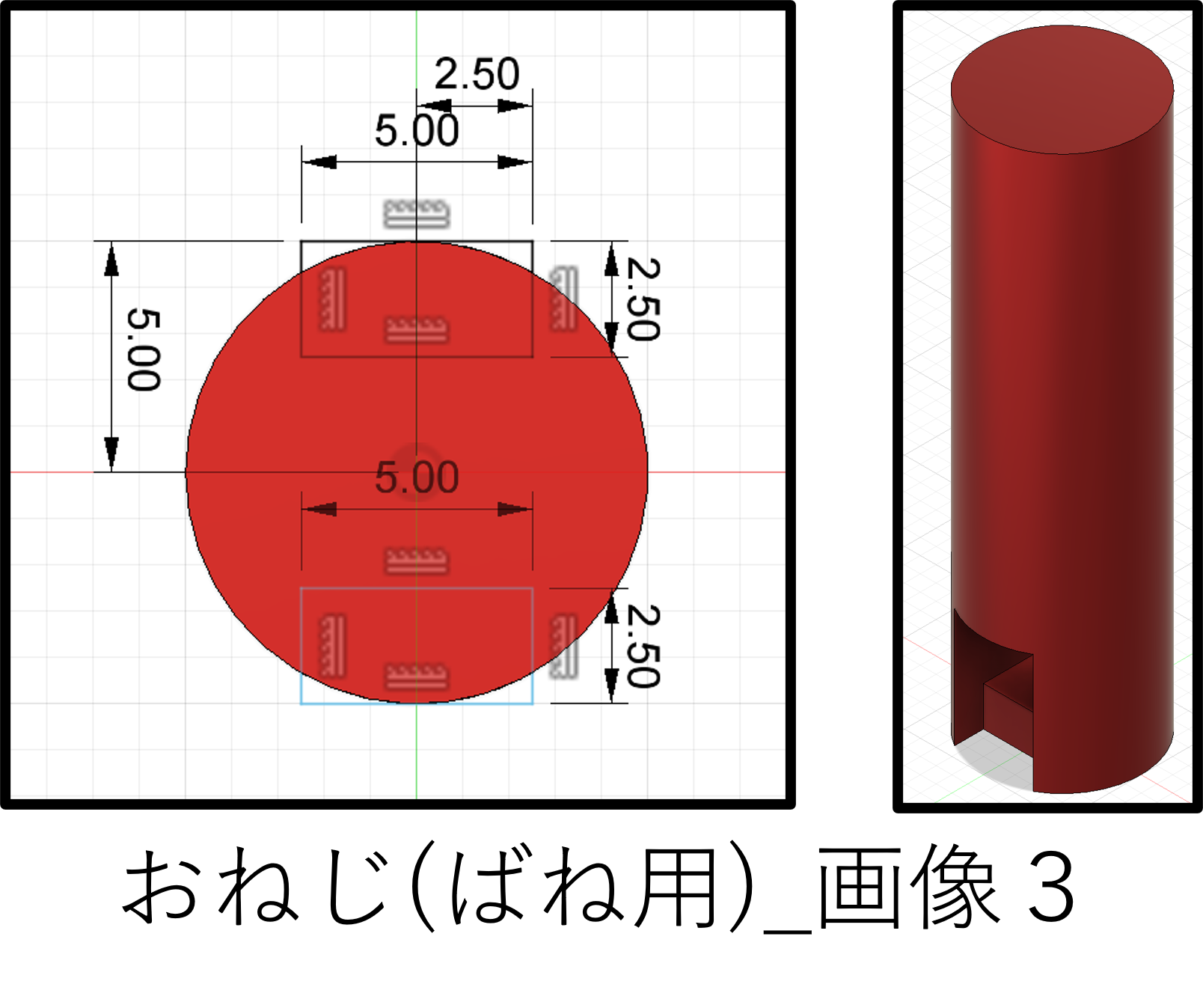
ばねを取り付けやすいよう、穴あけを行った部分を追加工します。
円柱下部を選択し、縦軸方向に縦2.5mm×横5.0mmの2つの四角形を描きます。
押し出し[切り取り]で2.5mm切り取ります。
「おねじ(ばね用)」~step4~
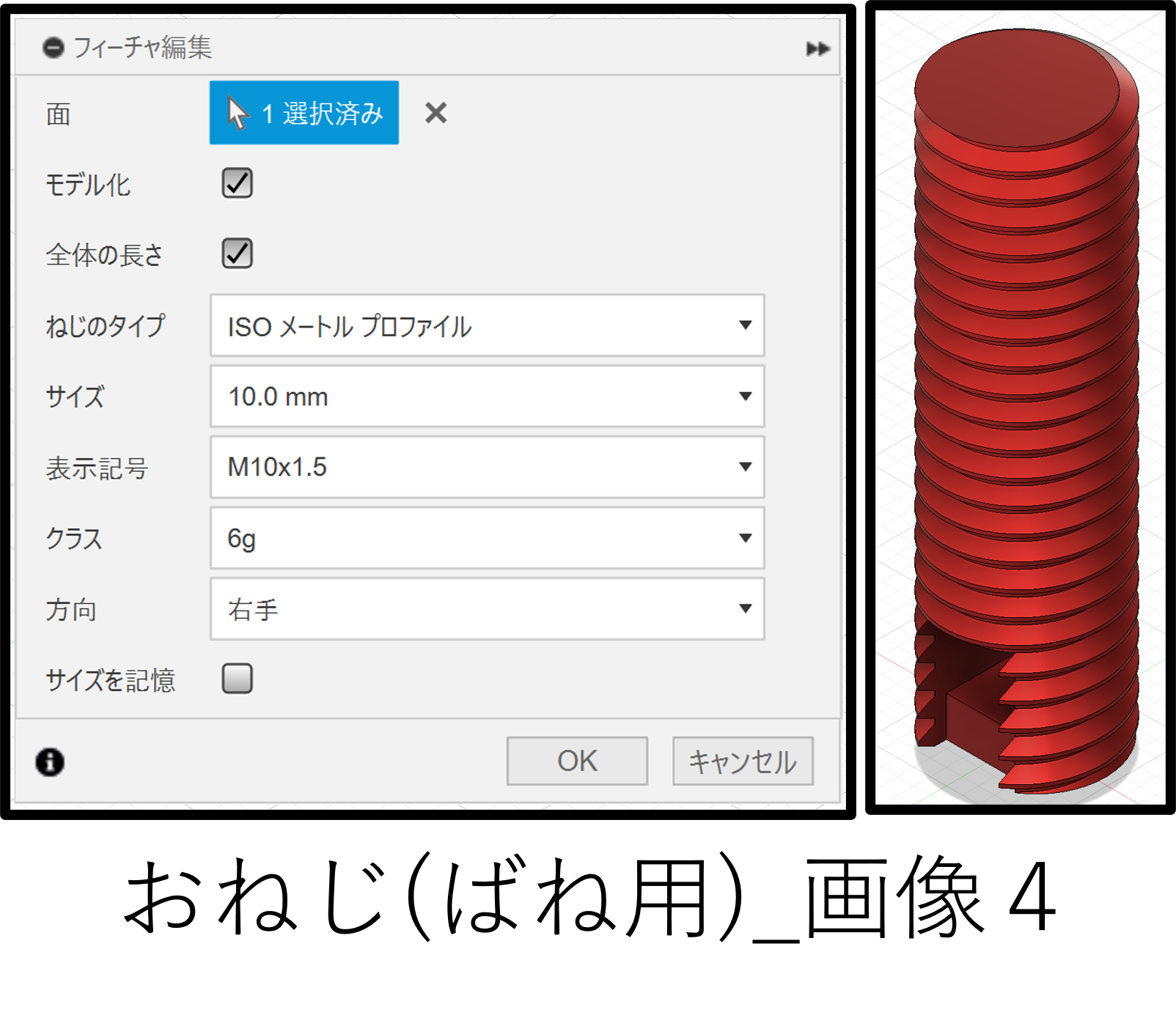
最後にM10のねじを作成します。
円柱側面を選択した状態で、デザインの「作成」⇒「ねじ」をクリックします。
各種設定として、以下を決定します。
モデル化:チェック
全体の長さ:チェック
ねじのタイプ:ISO
サイズ:10.0 mm
表示記号:M10×1.5
クラス:6g
方向:右手
おねじ(ばね用)は以上で完成です。
「めねじ(ばね用)」
「めねじ(ばね用)」~step1~
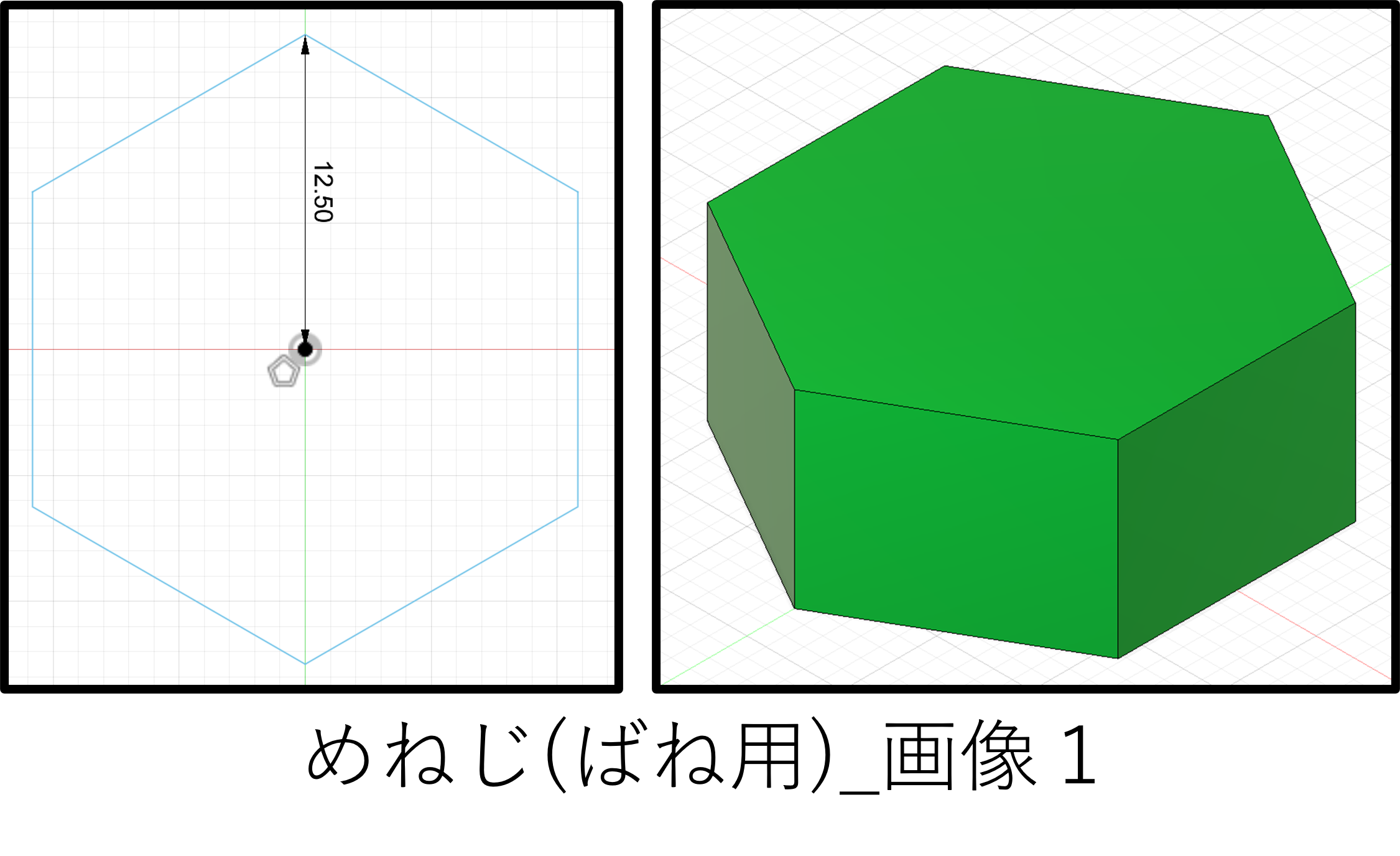
デザインの内接ポリゴンを使用し、12.50mmで六角形を描いてください。
その後、高さ10mmで押し出します。
「めねじ(ばね用)~step2~
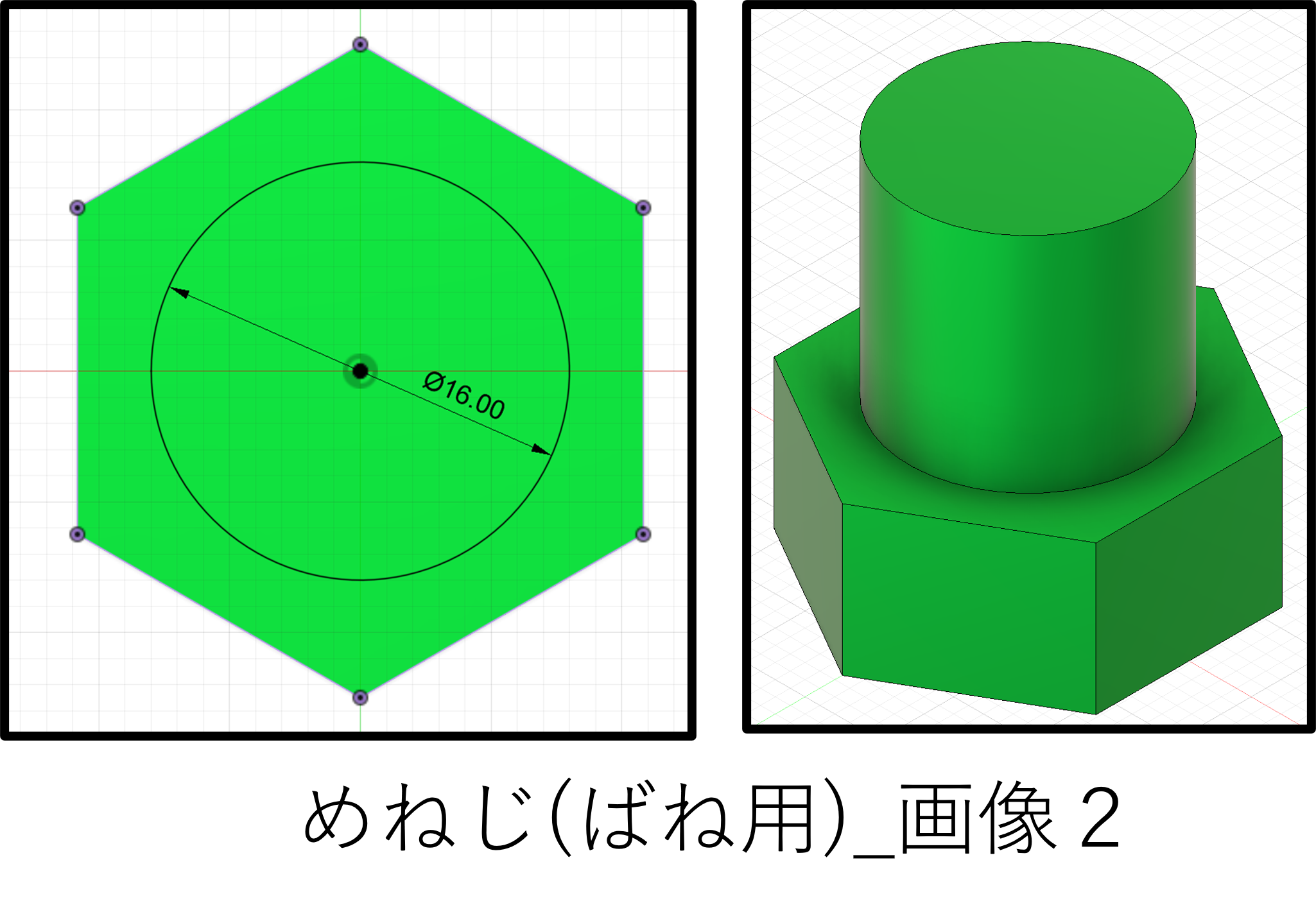
上面を選択し、Φ16の円形を描きます。
その後、押し出し[結合]を上部へ15mm押し出します。
「めねじ(ばね用)」~step3~
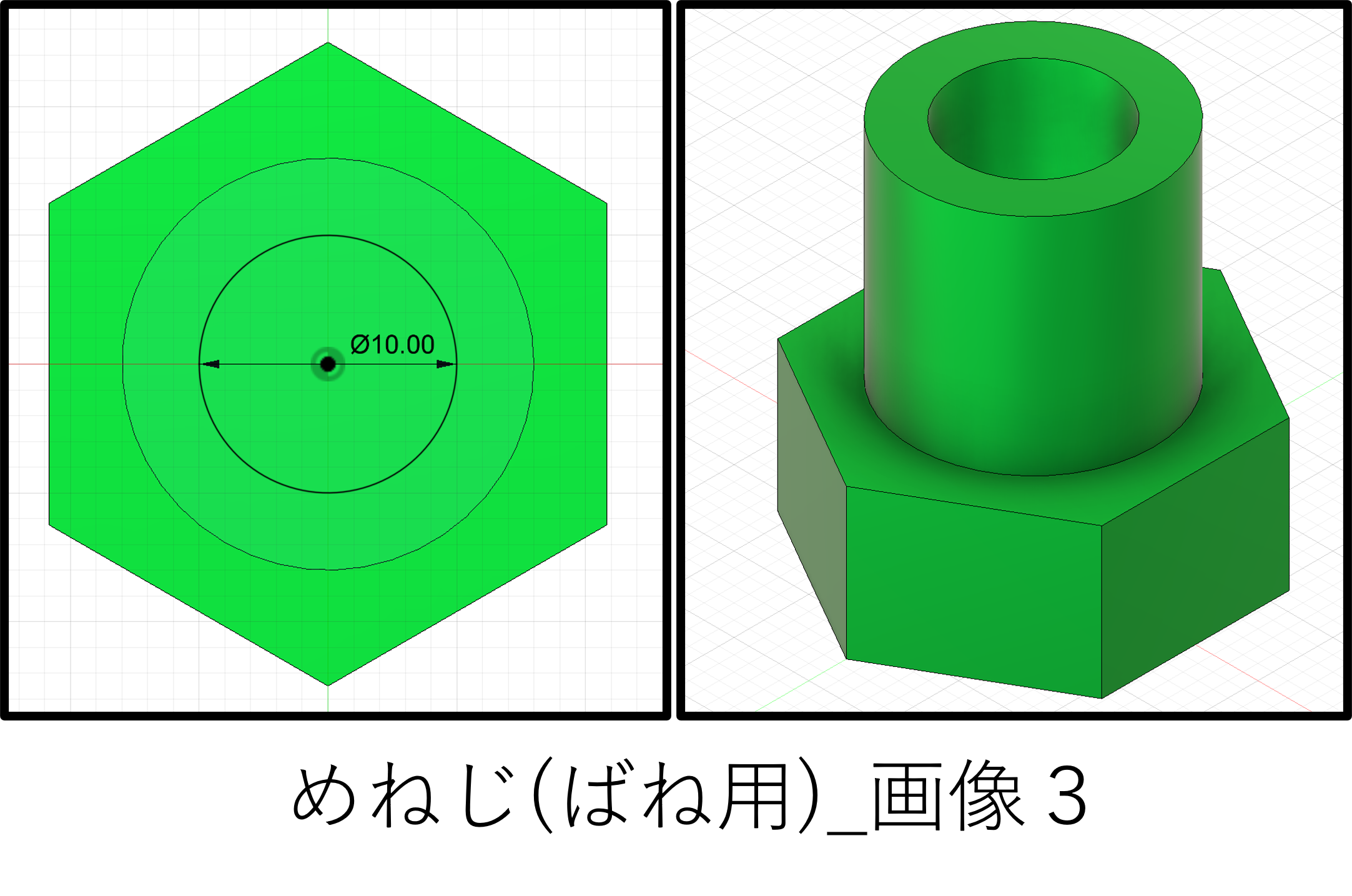
円柱上部を選択し、Φ10の円形を描きます。
その後、押し出し[切り取り]で下部に25mm切り取ります。
「めねじ(ばね用)」~step4~
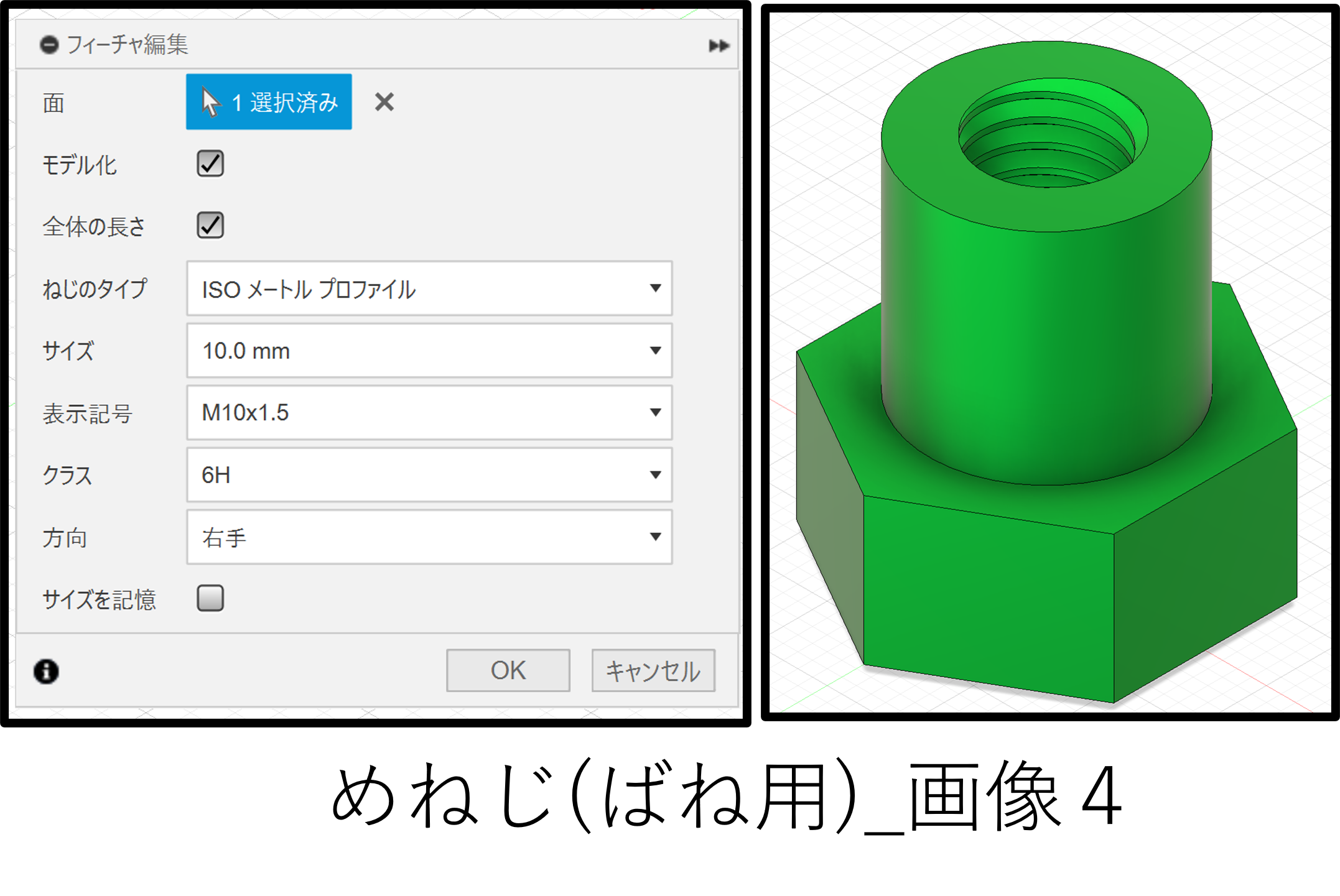
最後にM10のねじを作成します。
円柱の内部側面を選択した状態で、デザインの「作成」⇒「ねじ」をクリックします。
各種設定として、以下を決定します。
モデル化:チェック
全体の長さ:チェック
ねじのタイプ:ISO
サイズ:10.0 mm
表示記号:M10×1.5
クラス:6H
方向:右手
めねじ(ばね用)は以上で完成です。
アセンブリ行程
ここからは、作成した部品を使ってコンポーネントを挿入&アセンブリの手順を説明します。
コンポーネントを挿入にて、初期位置の移動は各種部品を繋ぐ形で使用している為、何度か遊びながら練習してみることをお勧めします。
➀外枠の挿入
新たなアセンブリ用データを作成し、コンポーネントの挿入で「外枠」を入れてください。
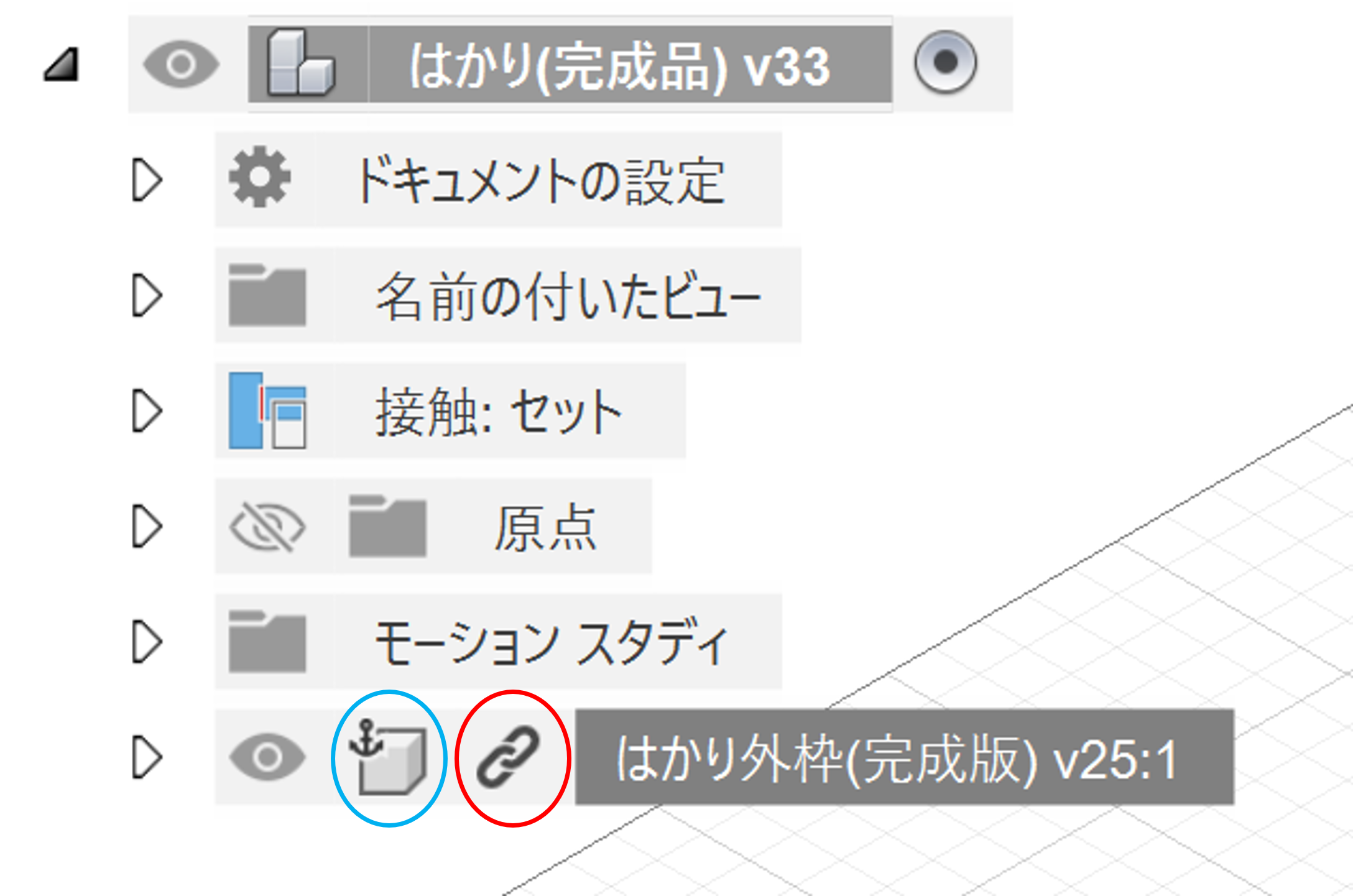
この部品が基準となる為、アンカー(⚓マーク)は外さないことをお勧めします。
[注]作成作業の為、各種部品のリンクを外さず作業しましたが、通常は画像赤丸のリンクは解除することをお勧めします。
➁リンクの挿入
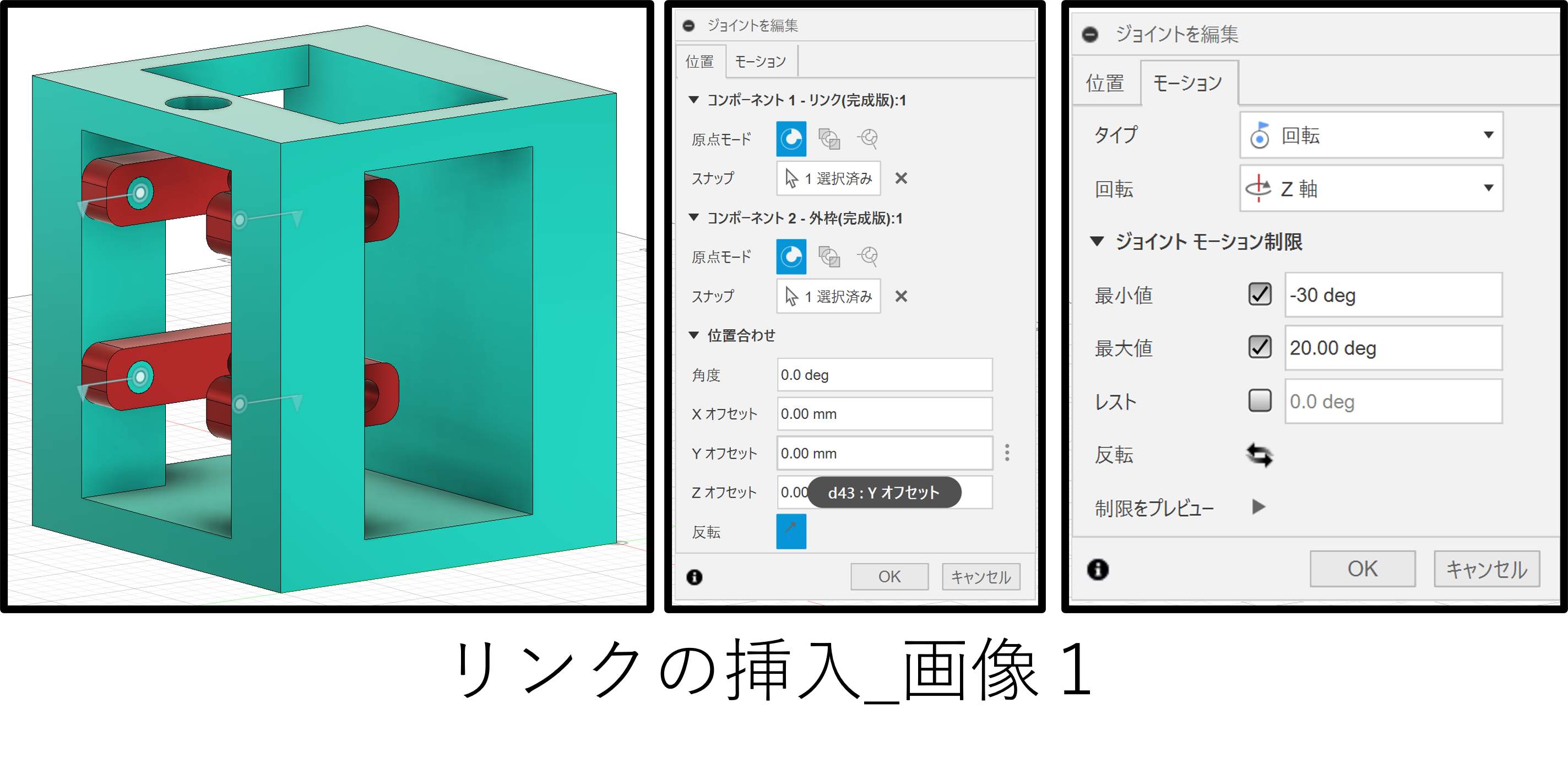
コンポーネントの挿入で「リンク」を4本入れてください。
初期位置の設定は、リンクが全て見える位置に4つとも仮配置してください。
各リンクについて、アセンブリの「ジョイント」を使用し外枠の円柱型突起に挿していきます。
このとき、モーションタイプは回転を選択し、コンポーネント1はリンク、コンポーネント2は外枠の突起を選択します。また、回転の制限として、枠上側に20°および枠下側に30°しか動かないよう、最小値と最大値の編集をしてください。
[注]ジョイント制限は-30° and 20°と、-20° and 30°があります。
なお、リンクは全て外枠の中に納まる方のリンク穴を使用します。
➂上皿の挿入
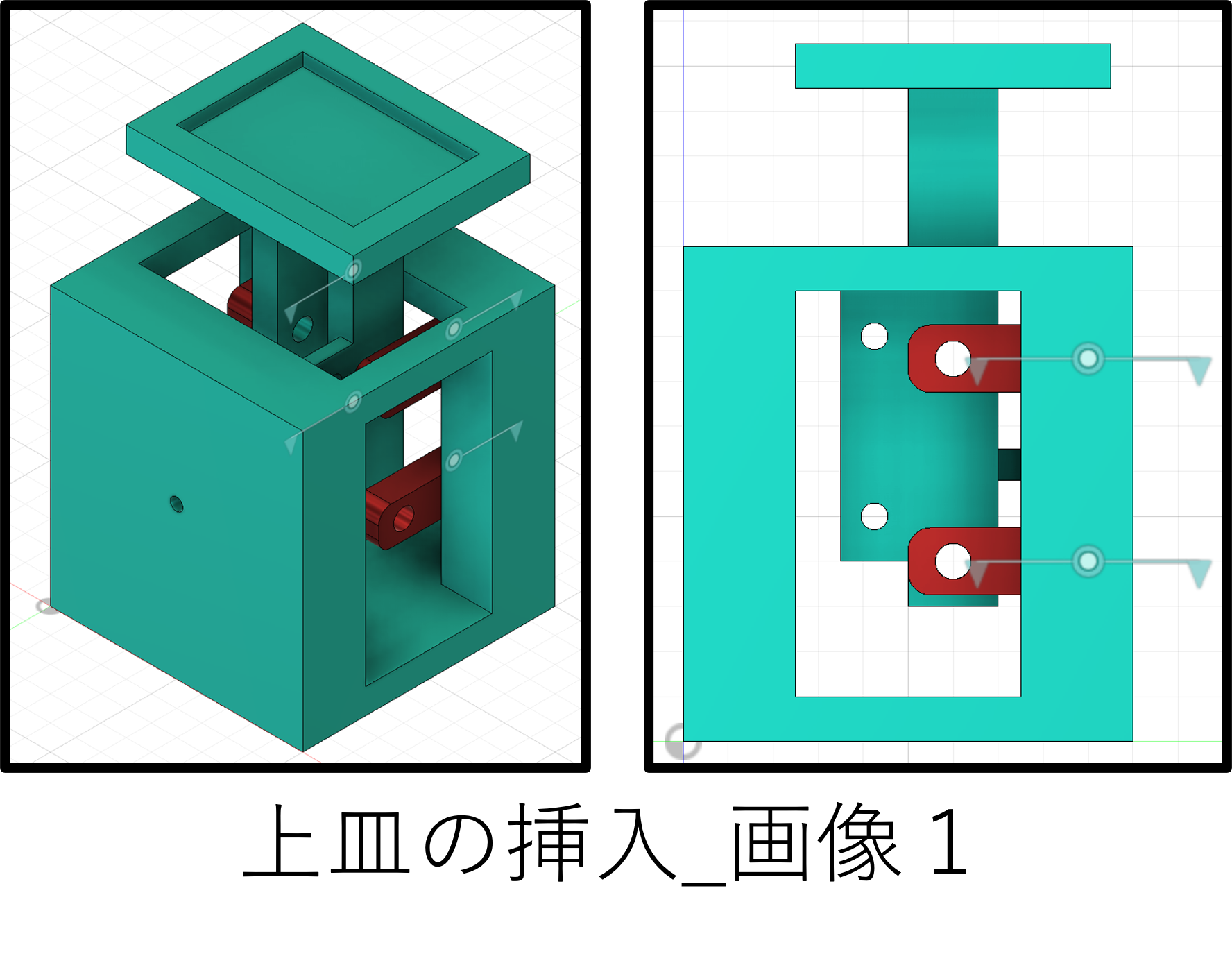
コンポーネントの挿入で「上皿」を入れてください。
初期位置の設定は、上二つのリンクと上皿上部の穴が横並びに、加えて、した二つのリンクと上皿下部の穴が横並びになるようにしてください。
[注]上皿は逆さに出力されるので180°ひっくり返す⇒大きい直方体突起が付いている方が外枠前面に向ける⇒該当する上皿の穴(側面側)と対応のリンク穴(内側)を点から点で移動 で行いました。
どのような動きが初期位置の設定で出来るか練習して慣れてみてください。
④ピンの挿入
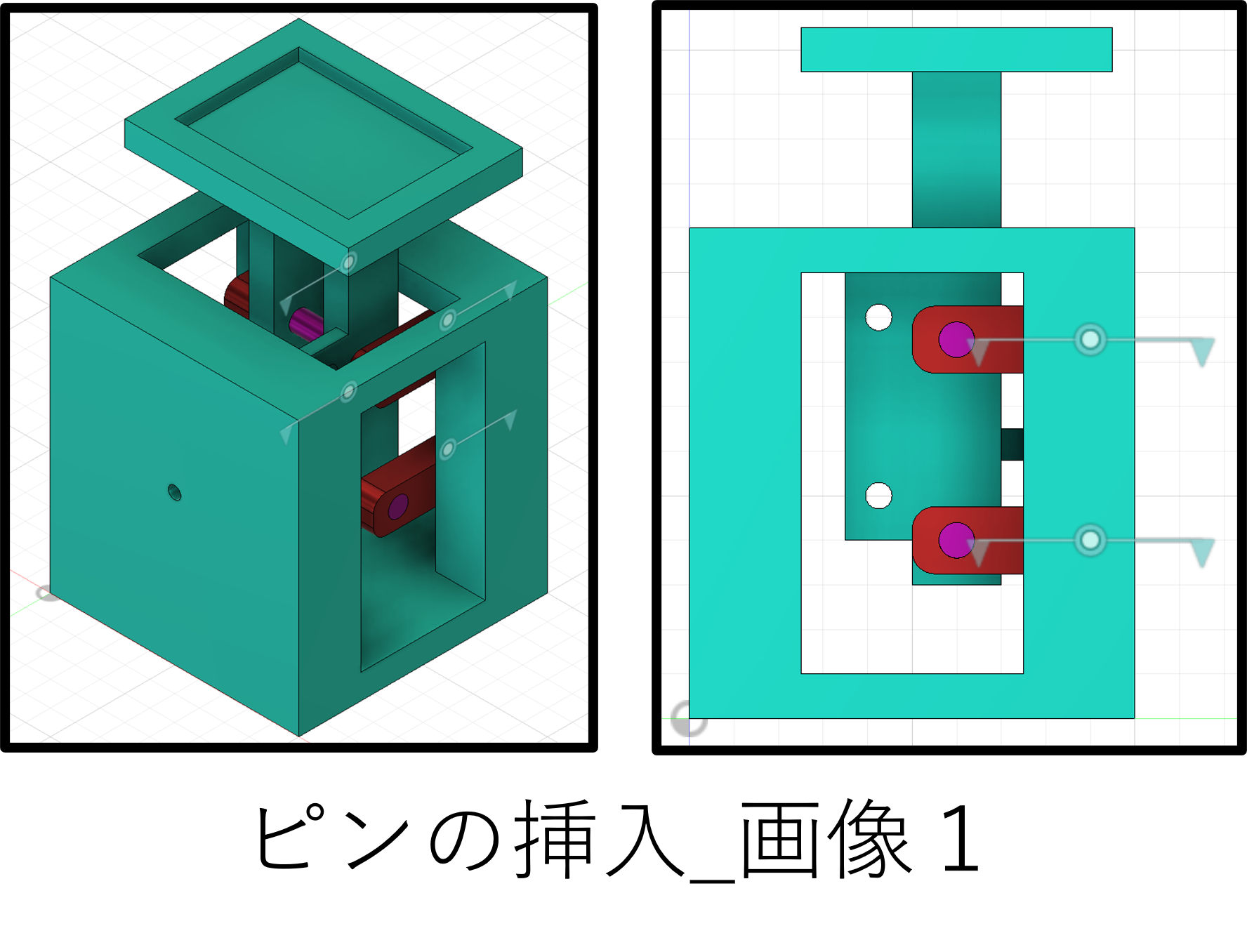
コンポーネントの挿入で「ピン」を2本入れてください。
初期位置の設定は、先ほどの「リンクと外枠の円柱穴」にきれいにピンが入るよう設定してください。
加えて、ピンとリンクは剛体で「ジョイント」を行ってください。
⑥歯車(回転軸側)と回転軸の挿入
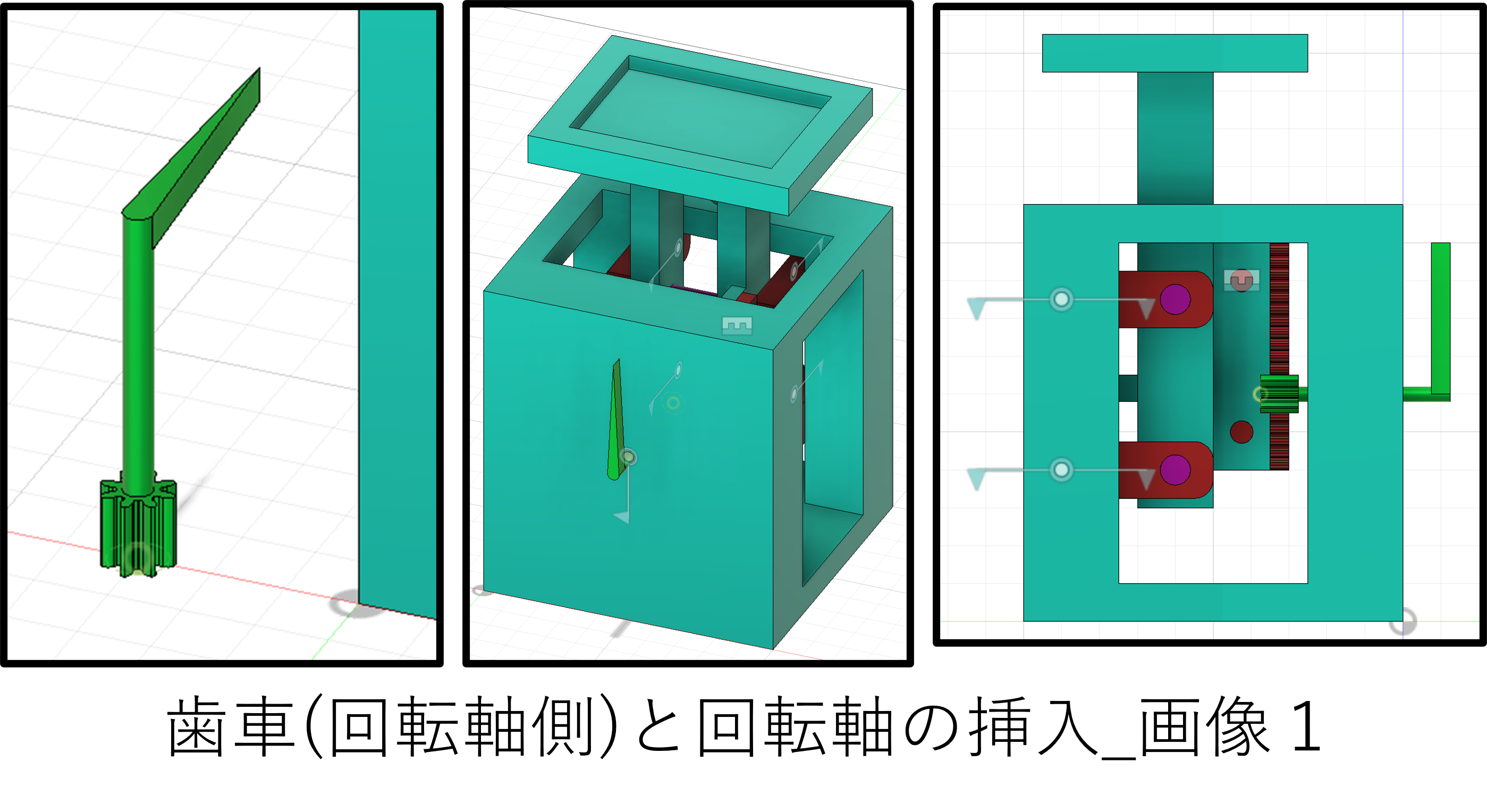
コンポーネントの挿入で初めに「歯車(回転軸側)」、次に「回転軸」を入れてください。
初期位置の設定は、歯車は全体が見える位置に仮配置し、回転軸は歯車に組み合わせるよう位置設定してください。
2つの部品が組み合わさった状態になったら、結合で1つの部品にしてください。
その後、「ジョイント」にてコンポ―ネント1を歯車+軸の底面中心に、コンポーネント2を外枠の前面の穴に設定し、「回転」を選択します。このとき、位置は歯車(回転軸側)と歯車(上皿側)が中央に配置されるようにしてください。
➁-➁リンクのモーション同期
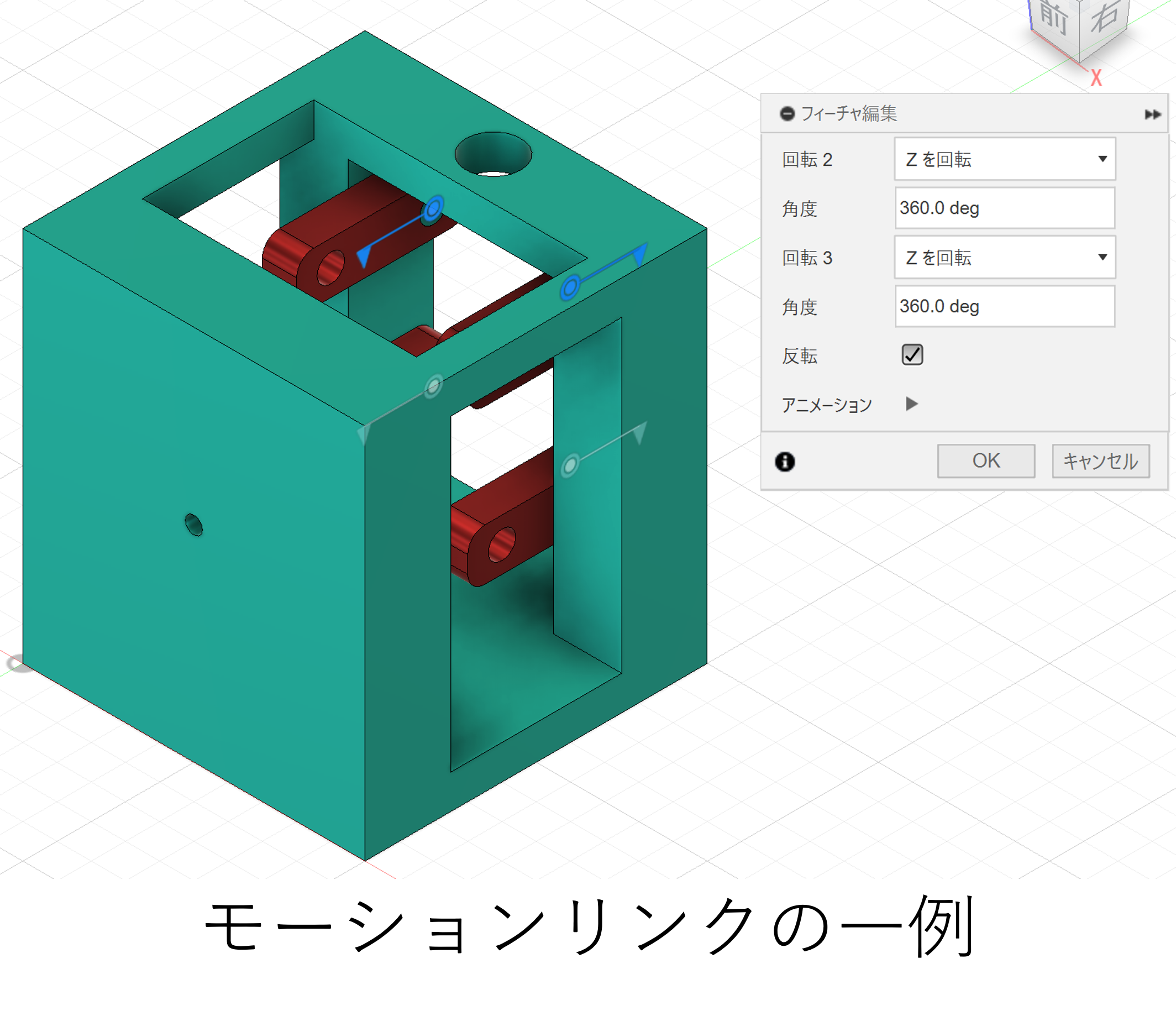
リンクと外枠でつけた「ジョイント」を、モーションリンクで同期します。
初めに、同じ壁側にある「ジョイント」に対してそれぞれモーションリンクを行います。
(2つのリンクが同じ動きでなく反対の動きをする場合は、反転にチェックを入れると解決すると思います。)
次に、上記の2つのモーションリンクを同期するために片壁の「ジョイント」を1つずつモーションリンクで選択します。
(上側・下側のリンクのどちらかを選択します。)
(先ほどと同じく、2つのリンクが同じ動きでなく反対の動きをする場合は、反転にチェックを入れると解決すると思います。)
以上の手順を行うと、4つのリンクが同じ動作・同じ周期で回転します。
④-➁ピン,上皿,リンクを使用した接触設定
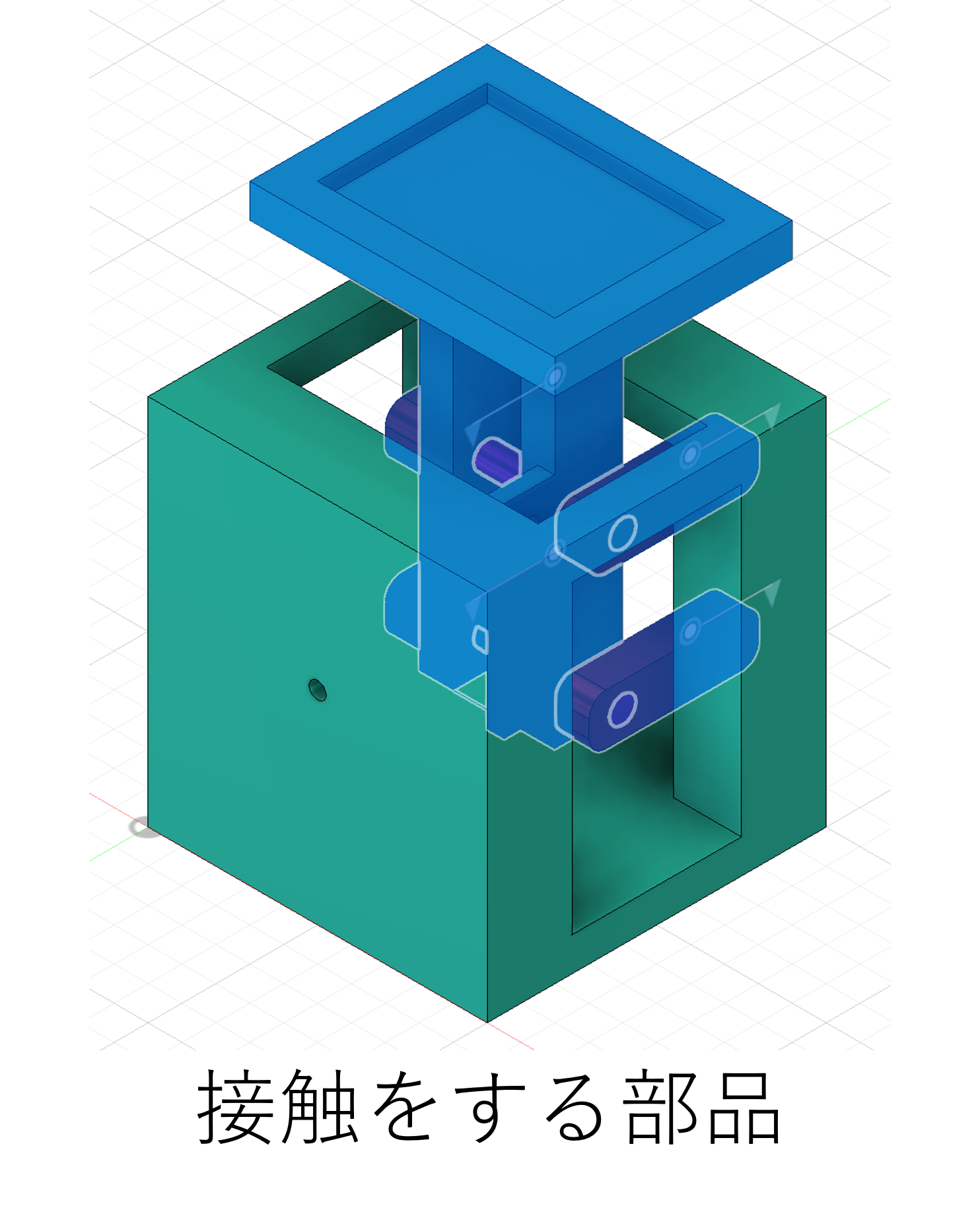
ピン,上皿,リンクを接触で動くように設定します。
デザインの「アセンブリ」に「接触セットを有効化」があり、これをクリックして有効にします。
もう一度「アセンブリ」に行くと、「新規接触セット」が表れるのでクリックします。
ボディまたはコンポーネントを選択できるようになるため、ピン2本,上皿,リンク4個をすべて選択します。
完了すると、上皿やピンがリンクの動きと合わさって上下に動くようになります。
➄歯車(上皿側)の挿入
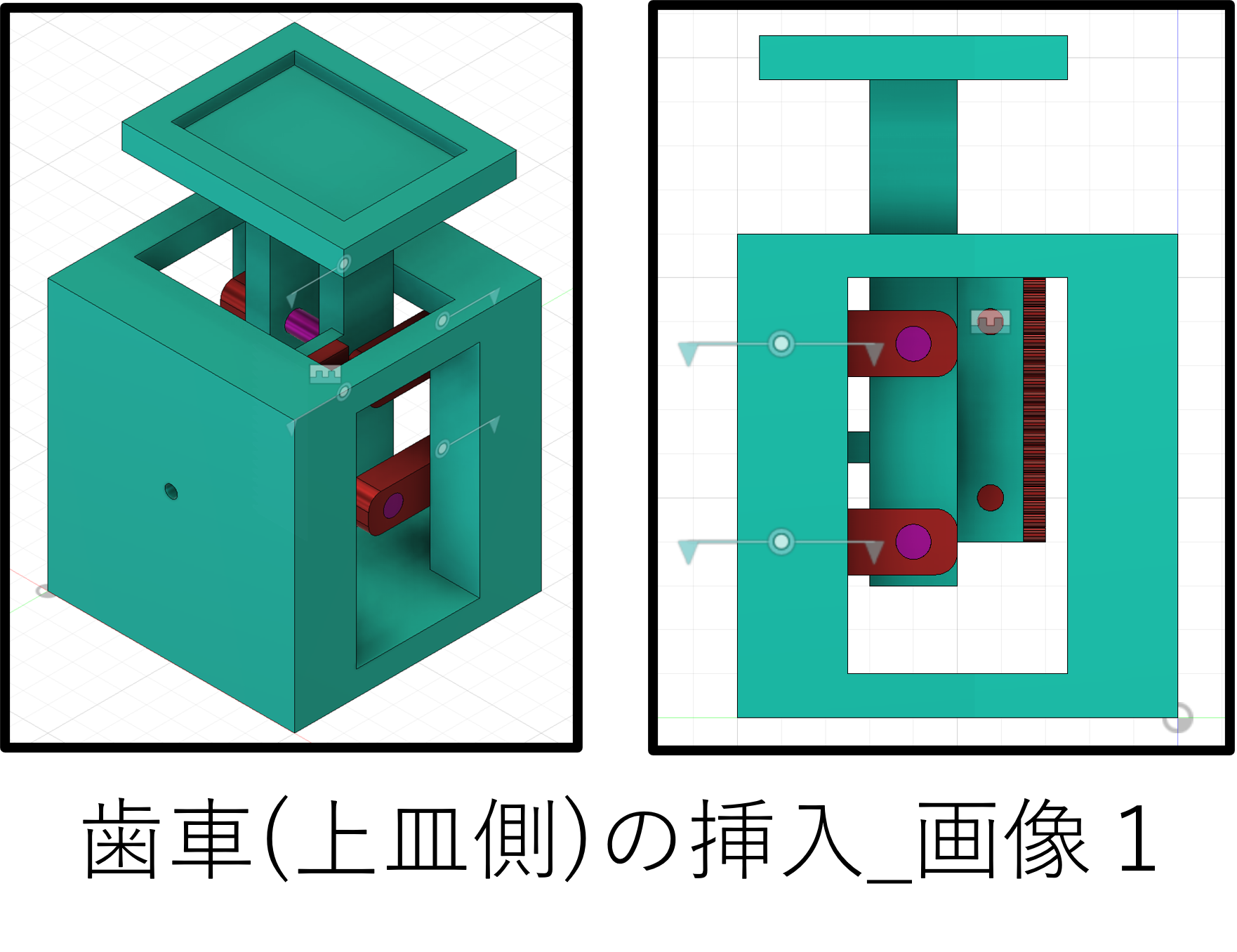
コンポーネントの挿入で「歯車(上皿側)」を入れてください。
初期位置の設定は、歯車(上皿側)が全て見える位置に仮配置してください。
アセンブリの「ジョイント」を使用し上皿の円柱穴に合わせます。
このとき、モーションタイプは剛体を選択し、コンポーネント1は歯車(上皿側)、コンポーネント2は上皿の円柱穴を選択します。
(歯車の円柱突起と対応する円柱穴を選んでください)。
(位置はあっているが向きが反転している場合は反転をクリックすることで合わせられます)。
⑦ばね用のめねじ,おねじの挿入

コンポーネントの挿入で初めに「めねじ(ばね用)」、次に「おねじ(ばね用)」を入れてください。
初期位置の設定は、両方とも全体が見える位置に仮配置してください。
初めに、めねじを外枠のばね機構用に開けた穴に入れます。次に、おねじをめねじとかみ合わせます。
今回は「ジョイント」の回転で位置合わせのアセンブリを行いましたが、Fusion上での動きのシミュレーションには直接関わらない為、剛体での位置合わせや移動を使用しても構いません。
⑧アセンブリの完了
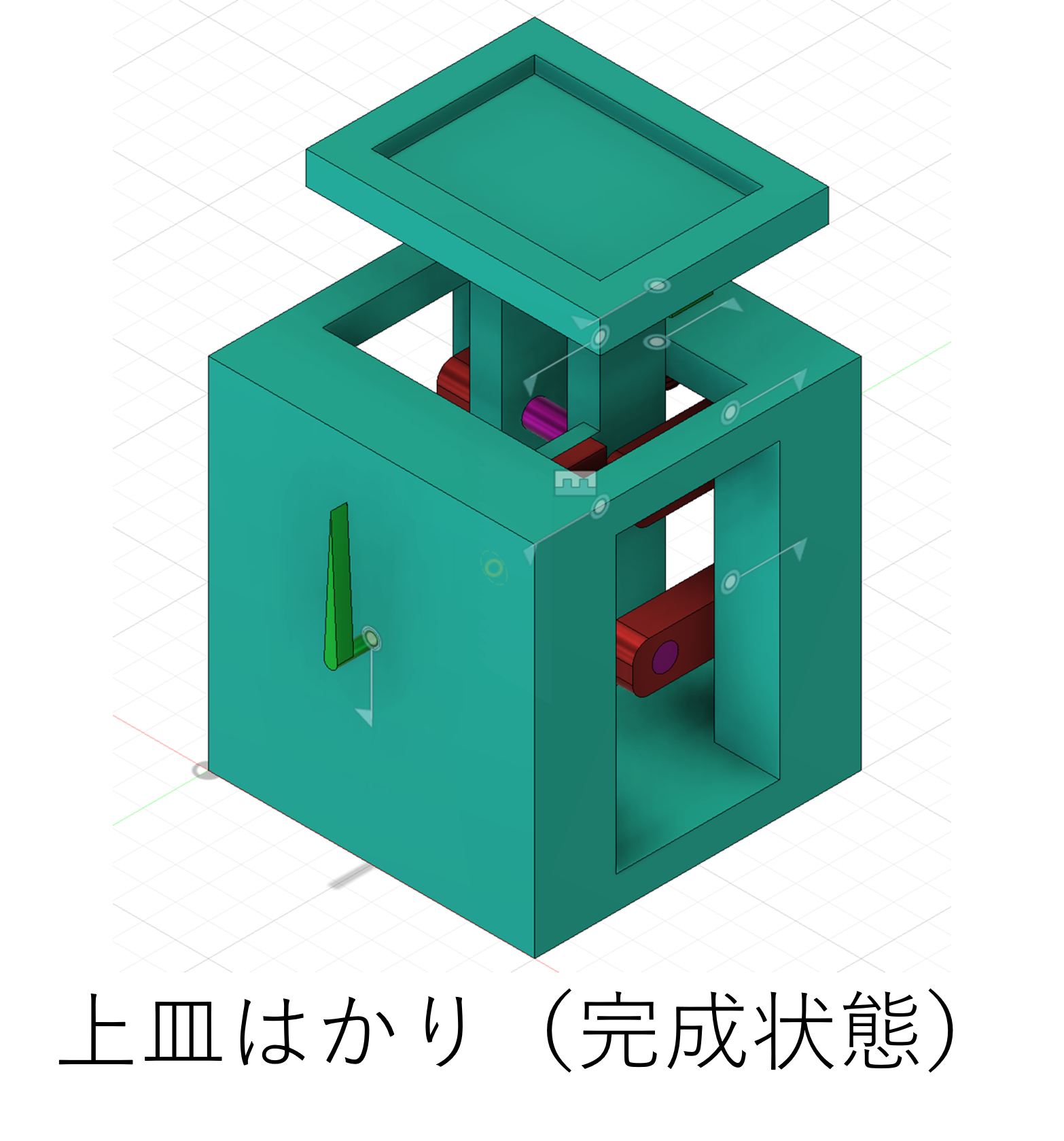
以上でアセンブリ行程は終了です。
モーションスタディーの設定
実際に上皿はかりがどのような伝達・駆動で動いているかを動作・映像化します。
[注]ただし、歯車のかみ合わせなどは動きを与える際に、一定時間毎に手を加えています。
あくまで視覚的なものだと把握して閲覧や使用をしてください。
「モーションスタディ」~step1~
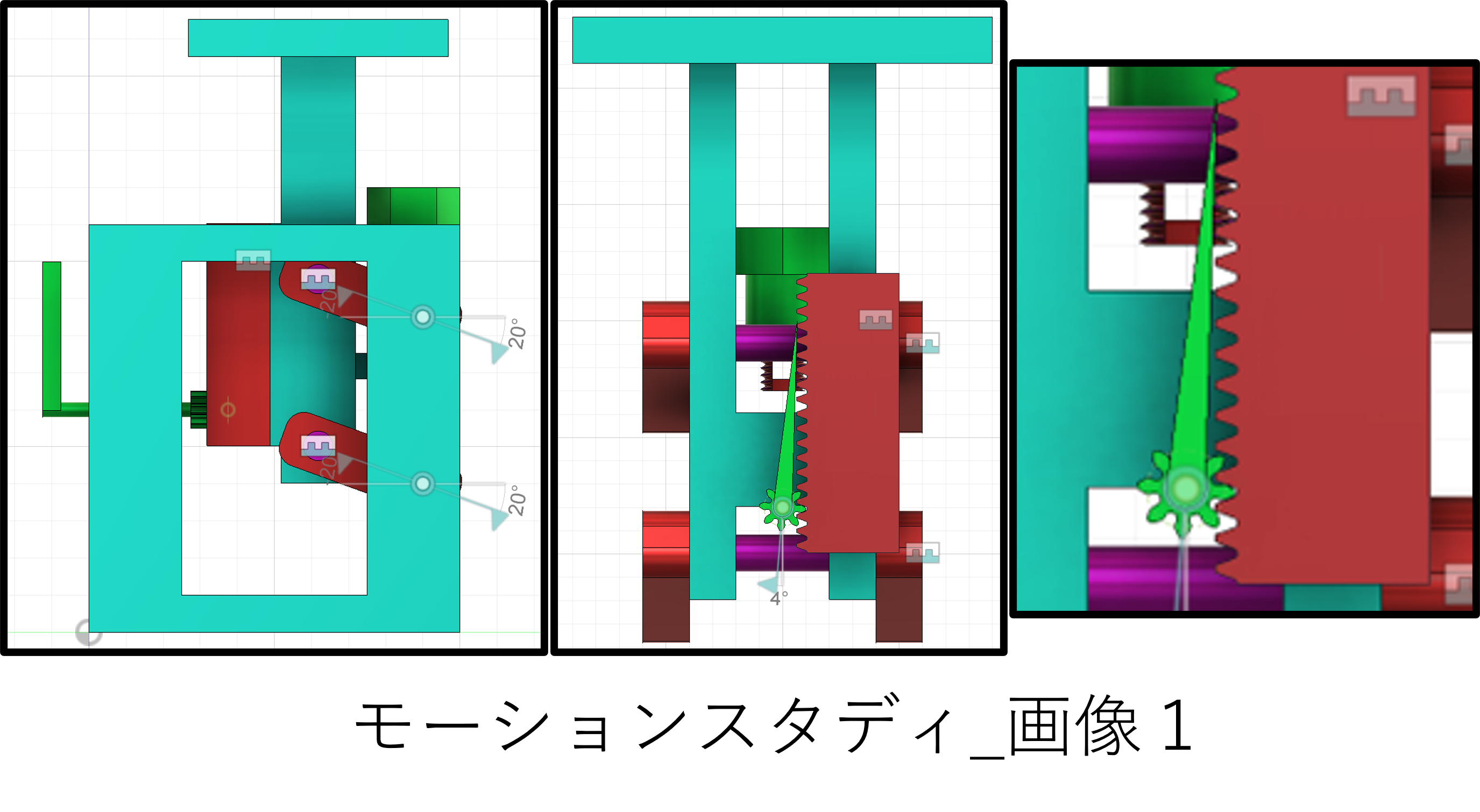
前提として、リンクの「回転ジョイント」をダブルクリックすると、初期角度を変更できます。
角度を上側の最大に変更してください。
その後、外枠を一端非表示にして、回転軸の歯車がラックギアとかみ合うよう、回転軸の回転ジョイントを時計回りに少しだけ回してください。
「モーションスタディ」~step2~
「アセンブリ」内の「モーションスタディー」をクリックしてください。
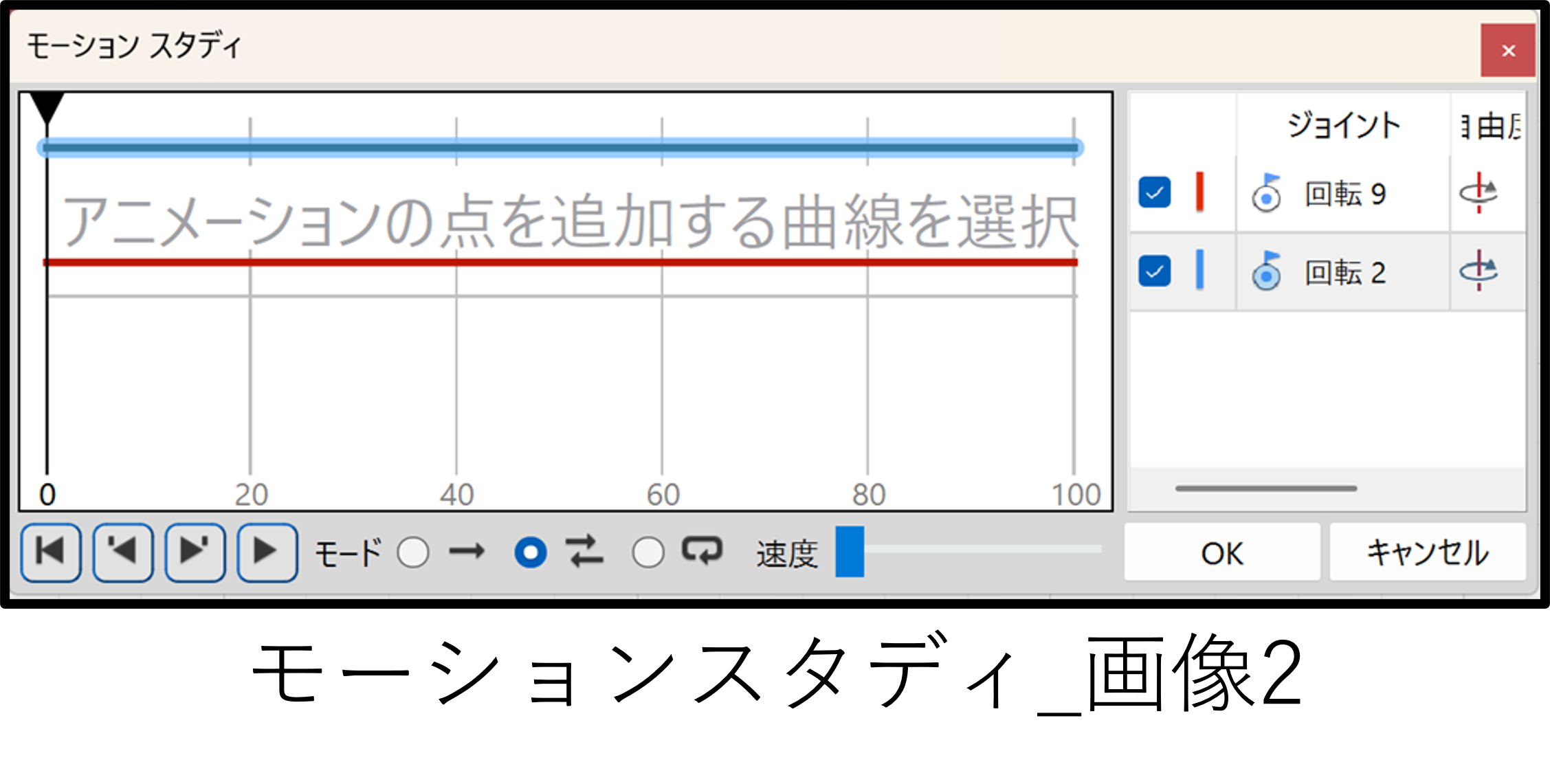
編集中に消えないようにする為、回転軸の「ジョイント」とリンク4つの内のどれかの「ジョイント」を選択したら、OKを押してください。
※画像では、青がリンクの線、オレンジが回転軸の線です。
このとき、速度は最小、モードは行き戻り(⇄)にしてください。
[注]次の作業はそのまま続けられますが、不安な場合はここで一度区切り再度編集で開くことをお勧めします。
「モーションスタディ」~step3~
先ほどのモーションスタディがブラウザ内の一覧に表示されるので、展開し該当のモーションスタディで右クリックしてから編集をクリックしてください。
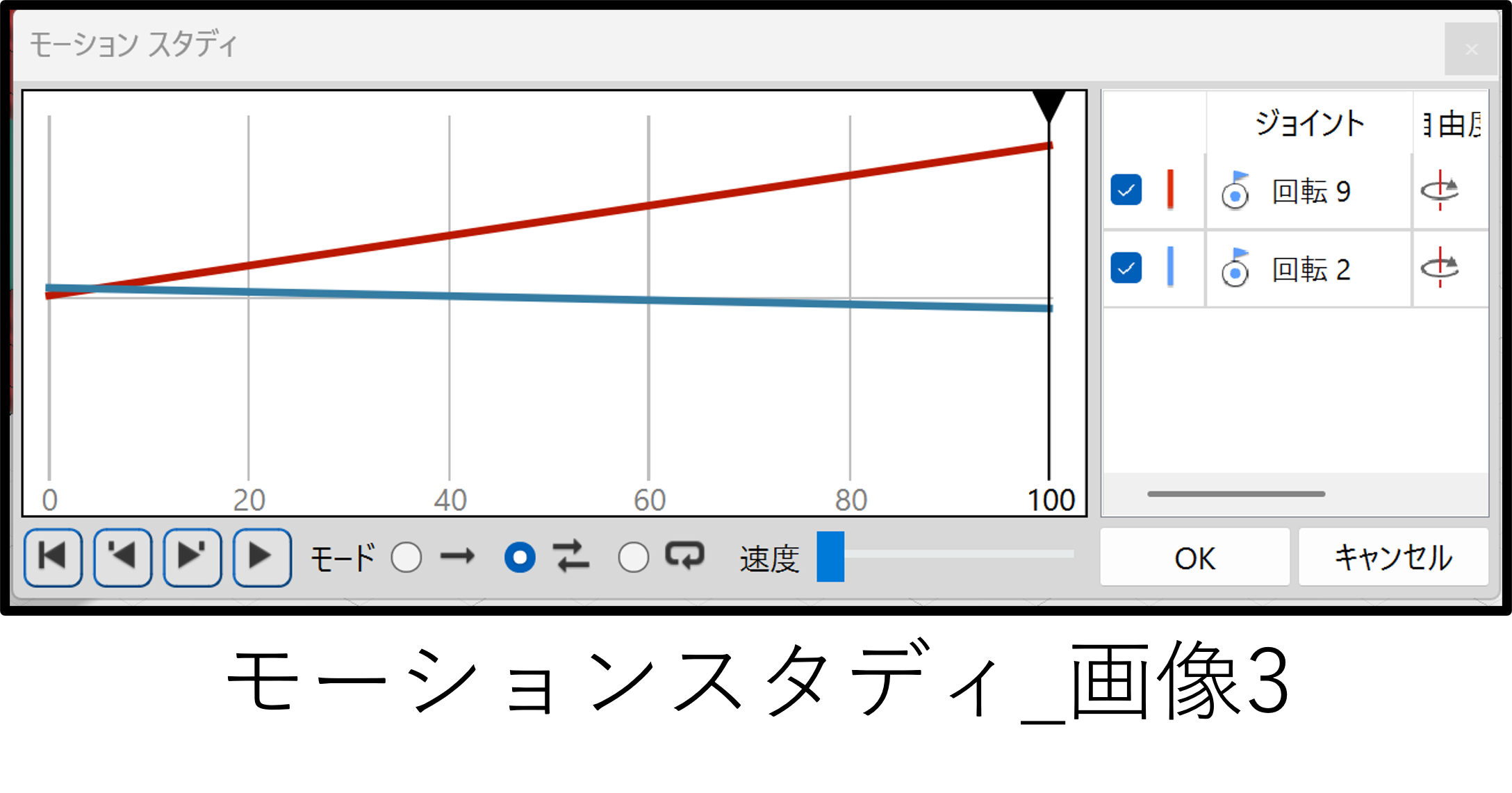
初期の設定として、リンクの線をクリックし「ステップ数:100」で「角度:-30°(選択したリンクによっては30°)」、回転軸の線をクリックし「ステップ数:100」で「角度365°」を設定してください。
※画像では、青がリンクの線、オレンジが回転軸の線です。
[注]次の作業はそのまま続けられますが、不安な場合はここで一度区切り再度編集で開くことをお勧めします。
「モーションスタディ」~step4~
最後に、そのままではラックギアと回転軸側歯車が途中で干渉するため、編集を行います。
[注]この内容が、実物を製作する場合に動作保証が出来ない要因です。
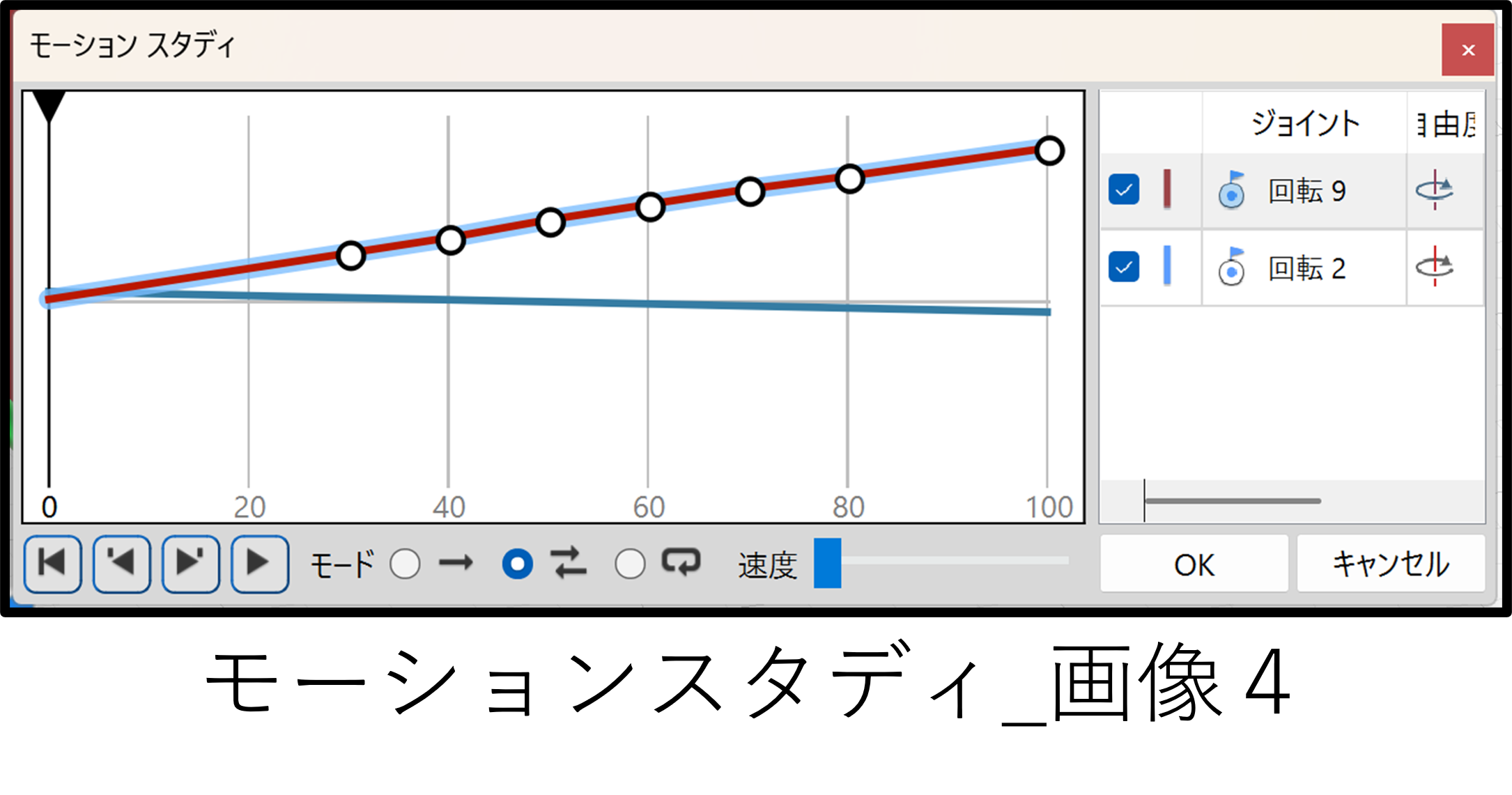
オレンジの回転軸の線をクリックし、下記設定を入れます。
「ステップ数:30」、「角度:114°」
「ステップ数:40」、「角度:151°」
「ステップ数:50」、「角度:189°」
「ステップ数:60」、「角度:228°」
「ステップ数:70」、「角度:262°」
「ステップ数:70」、「角度:298°」
この状態で再生を押すと、上皿はかりの動作を視覚的に確認できるよう作動できます。
「モーションスタディ」~step5~
(補足)
step3およびstep4の設定は、
はじめにstep3で100コマで1周前後の歯車がかみ合う角度を入力し、
次にstep4で1コマずつ送りズレ始めた箇所で補正を掛ける要領です。
本来の設計面では良くない手法ですが、各種兼ね合いで解決までは持っていけない為、現状はこの手法で行っています。
「以上で終了です」
最後まで閲覧くださりありがとうございました。
YouTubeへの動画アップロードなどは考えていない為、映像を直では流せません。
そこで、最初にも述べた通り各部品のデータ(f3d)、はかりの完成品データ(f3d)、実際のモーションスタディ時の映像などを添付しますので、興味がある方はご利用ください。
またの機会がございましたら、よろしくお願い致します<(_ _)>。
作成者:TASUKU9015
完成品 および 動画のダウンロード
完成品のダウンロード
動画のダウンロード