起動時
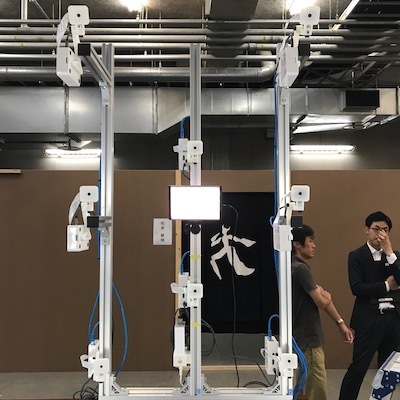
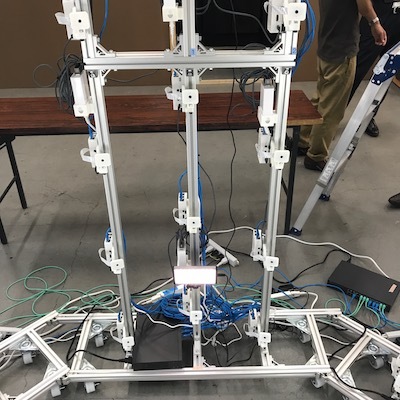
ハードウェアの起動
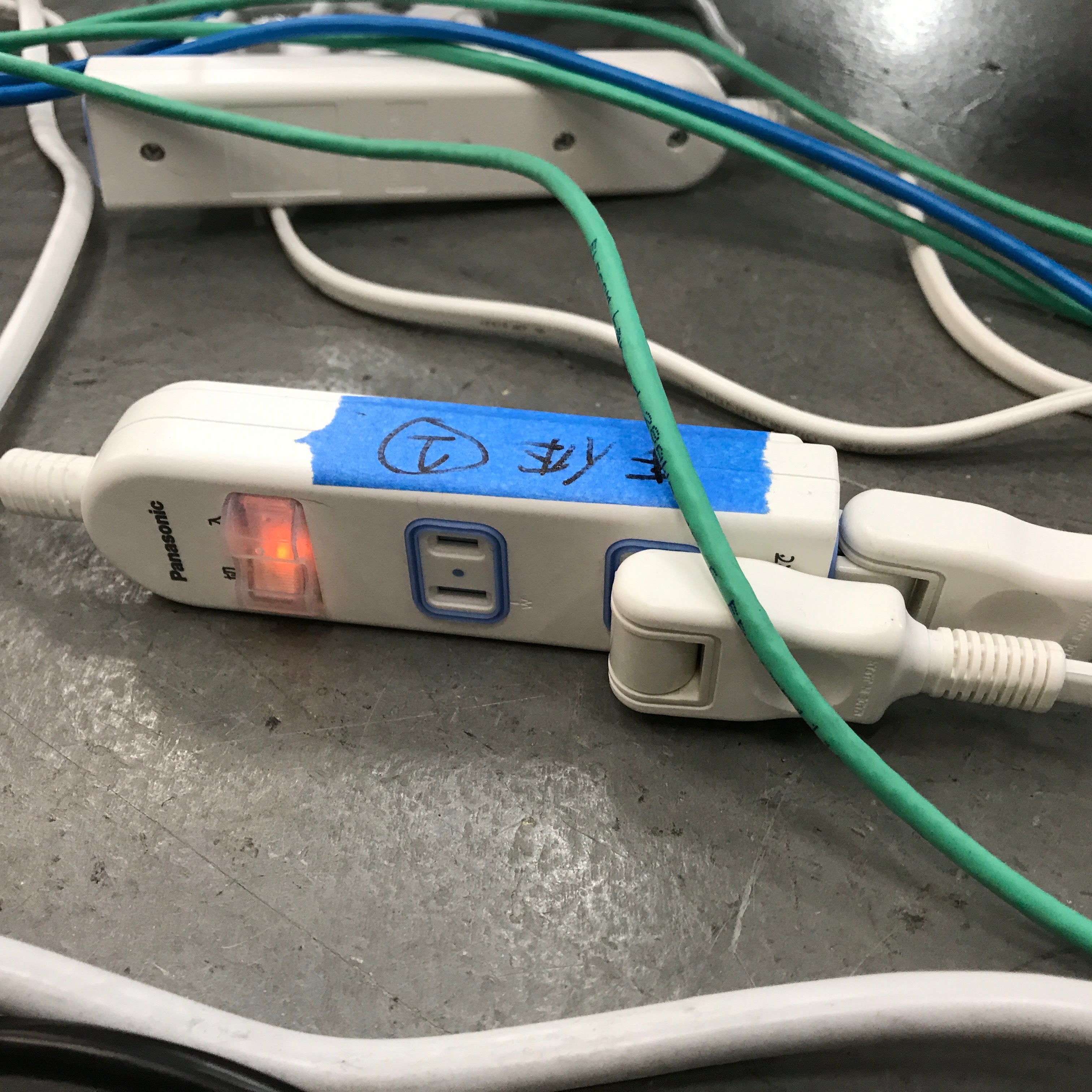
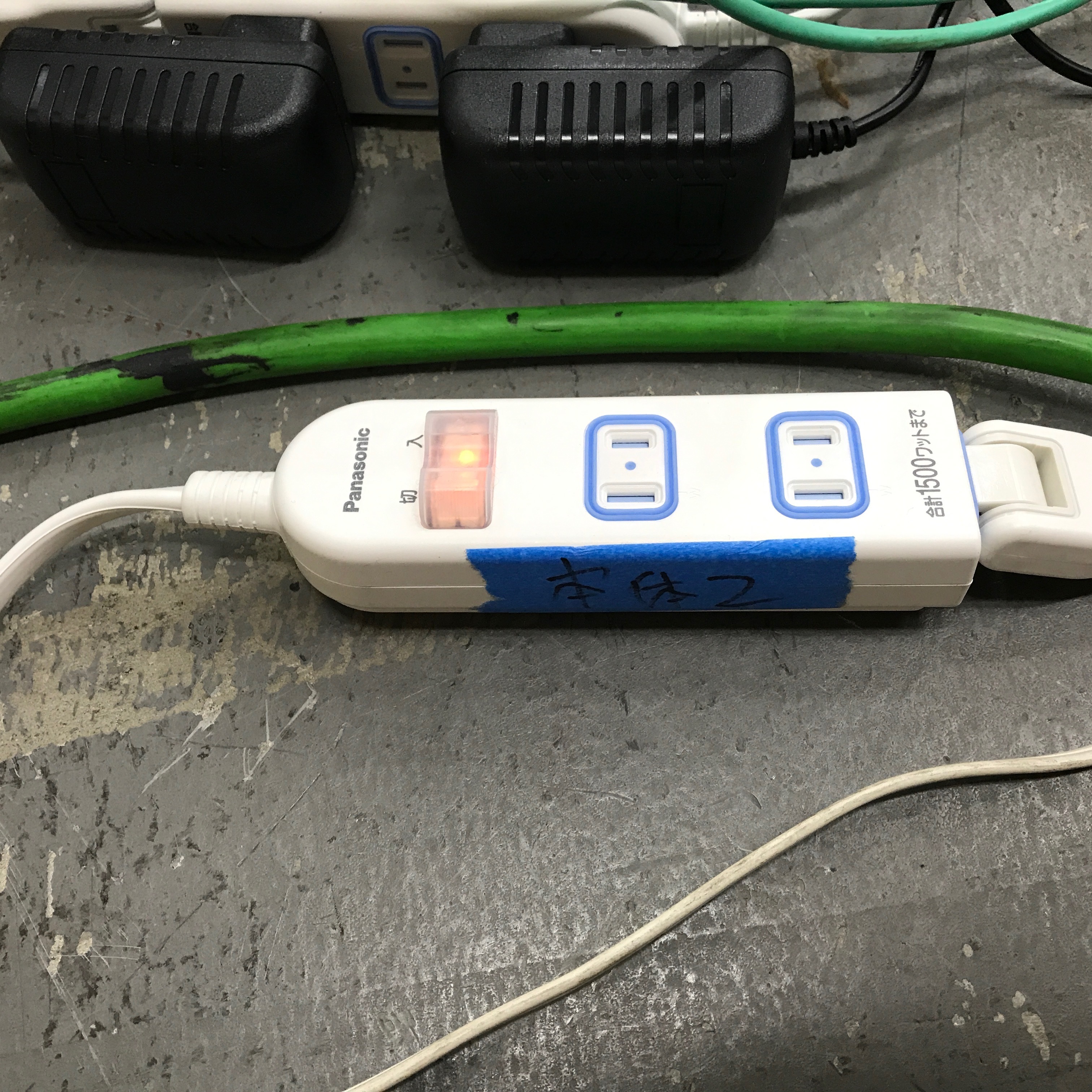
電源投入の順番
ハブは電源がついている。
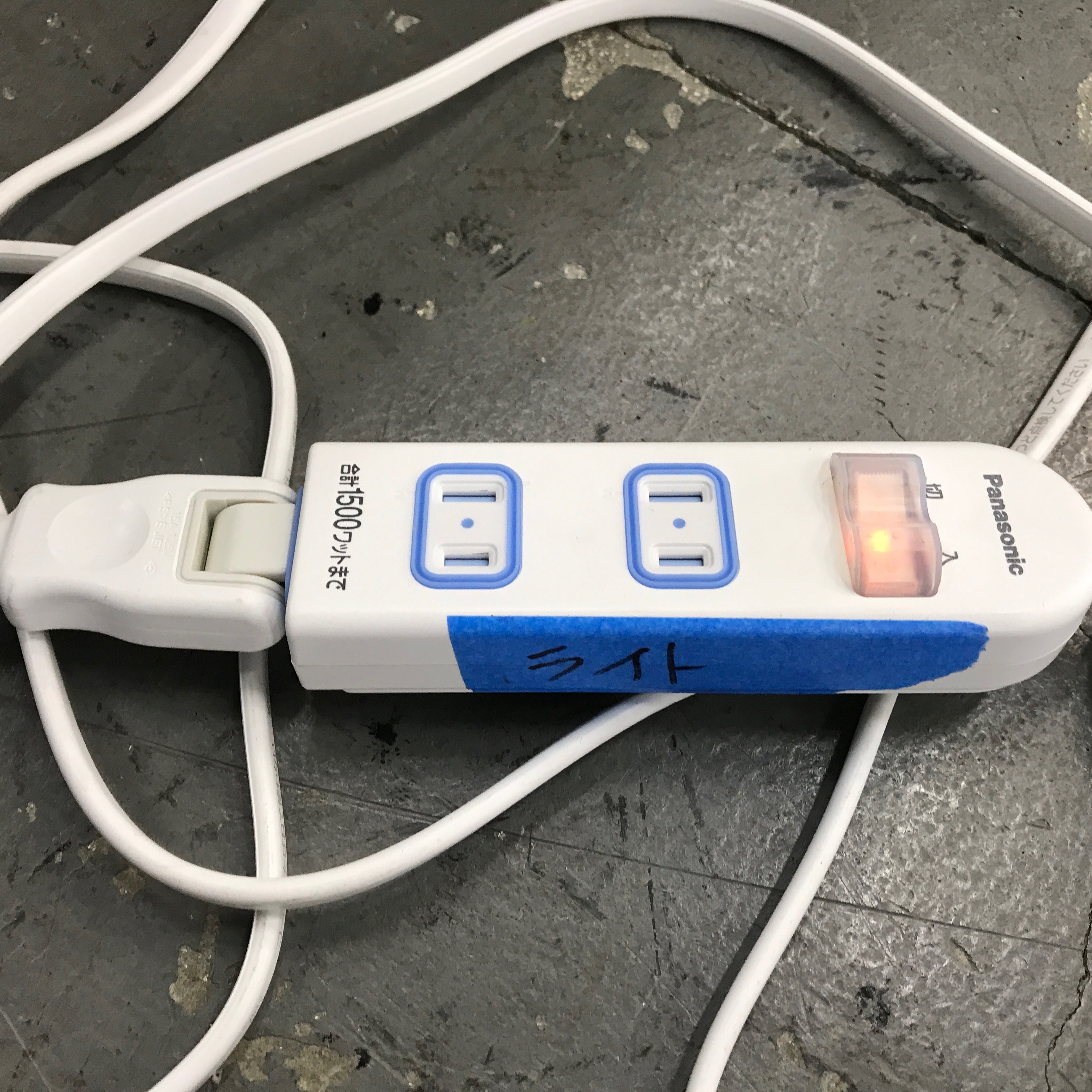
スイッチ付きのタップがある。
ライトの電源投入
本体1、2の電源投入
起動に時間がかかる(1分は待つ)
syncShooterでの撮影
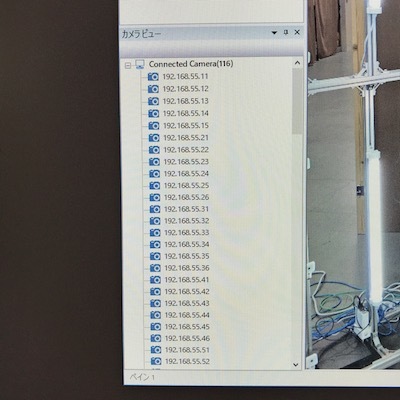
116枚のカメラを利用した全身スキャンの為のカメラ制御と撮影ソフト。
立ち上げ
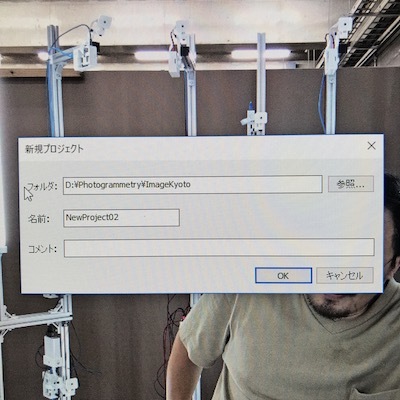
立ち上げ時は過去ファイルを引き継ぐので、新規でプロジェクトを立ち上げる。
保存場所の指定
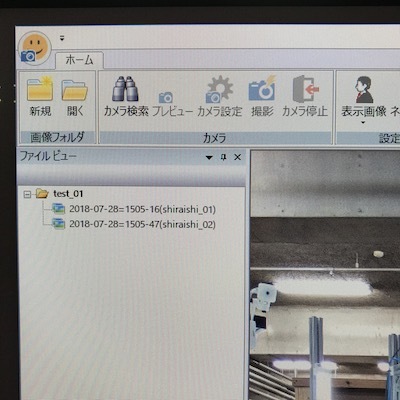
カメラ検索
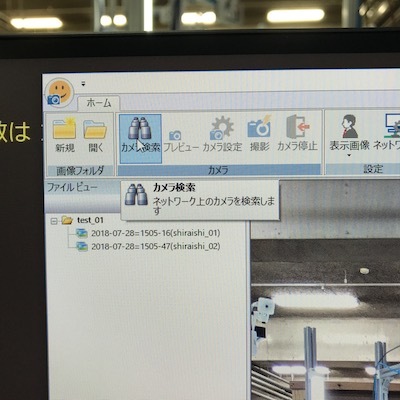
上部のカメラ検索をクリックし、アプリケーションとカメラを同期する。
配置されたカメラは116個
撮影
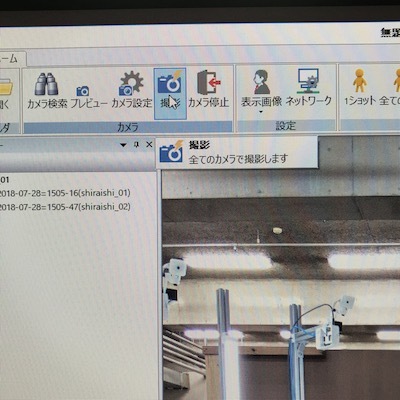
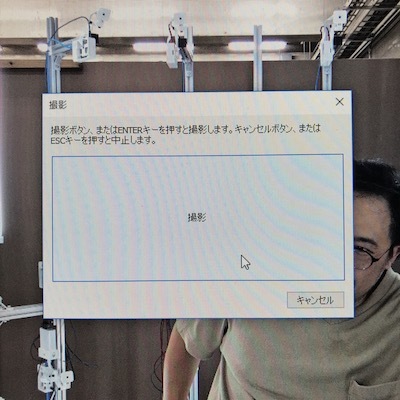
ツールバー上部にある撮影ボタンをクリック。
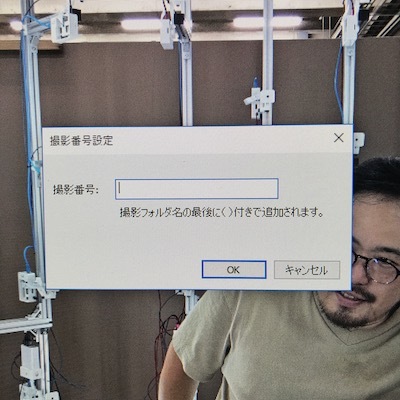
撮影番号を設定する。
同じプロジェクト内で固有の名前をつける。
同じプロジェクト内で固有の名前をつける。
次のウィンドウで出てくる、撮影ボタンをクリックで撮影をする。
シャッター音はならない。
シャッター音はならない。
撮影後の処理
撮影後、116枚の画像は自動的にRialityCaptureに転送されて、自動処理が始まる。
自動処理の内容は以下のステートで説明する。
RialityCaptureの自動処理
パイソン側からコマンドラインで処理
処理時間は15〜20分
画像読み込み
指定ファイルから、116枚の画像を読み込む
イメージアライン
ドラフト>アライン
二回処理する
アライ二イングの処理
ノーマルで処理、アラインでフェイルがてた場合、パラメーターを調整し、サイドアラインを行なっている。
リコンストラクション
イメージからの構成>ポイントクラウド>メッシュ処理まで終わる
リダクション
50万ポリゴンまで単純化削減する>ゴミ付き
30万>ゴミとり(飛島削除)
スムージングかける
テクスチャーの貼り付け
テクスチャーイメージを貼り付ける
完成
メッシュ処理が可能なアプリケーションで修正などを行う
終了方法
アプリケーションから>ラズベリーパイへのOSシャットダウンコマンドを送る
カメラ停止
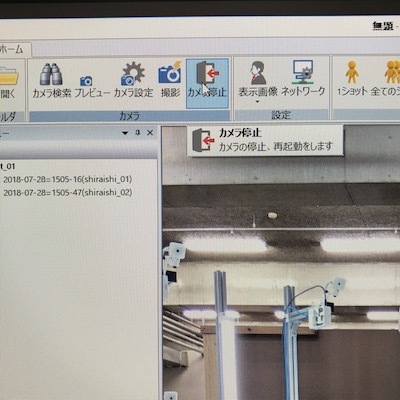
上部のボタンをクリック
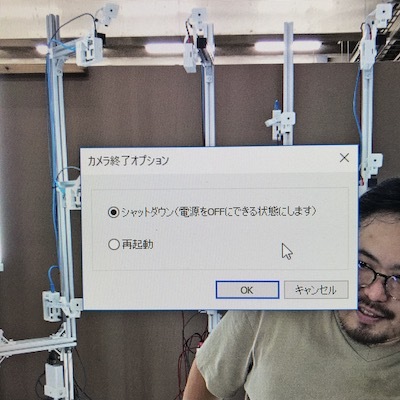
ウィンドウでshutdownをクリック
クリック後すぐにはshutdownされないので2分ほどは待つ。
再起動は使わない
スイッチを落とす
順番は無い
ハブはスイッチ無し