とりあえずリバースエンジニアリング
百均でなけなしのお金をはたいておもちゃを買った。あと弟にお下がりもらった。
何作ろうかな、、、
今回は流石になんとなく作るもの先に決めなきゃやばい。
思いつかないしんどい
なんか前回に引き続き全然浮かばない。どうした。パンダが下手くそな木登りをする動画を見て癒される。
、、、これ作りたい(涙)
調べる
だいぶロボットに近いのでそのままだとインタラクティブにはならない。声を出したら登ってくるとかにすれば良いのでは?
あんまり機構とか使ってないけど大丈夫かな、、、
モーターはサーボ
らしい。重さとかトルクについて詳しいところがあった。
動かす
サーボモーター動かした
あまりうまくいかない。音はするけど動かない。
電力が足りないのか?
ビンゴ。電池つけたら動いた。
重さ、ヤバない??
ここで不安になる。電池とモーター積んだぬいぐるみが登るって可能なのかな?しかも腕の機構はまだイメージできてない。
ここで
もう一個の案を思いつく。音立てたら飛び跳ねるウサギの人形は?そうしたらあまり重さの心配はしなくて良さそう。
はねあげる動きをしたい
サーボモータで0度から90度まで一気に動かしてみる。
が、うまくいかない。奇妙な動きを続けている。
わかった
同じくサーボモーターを使うりなちゃんとなぜなのか調べてみた。
結果、どうやら動きと動きの間に1秒くらいの間を空けないとうまくいかないことが判明した。
はねあげる機構作る
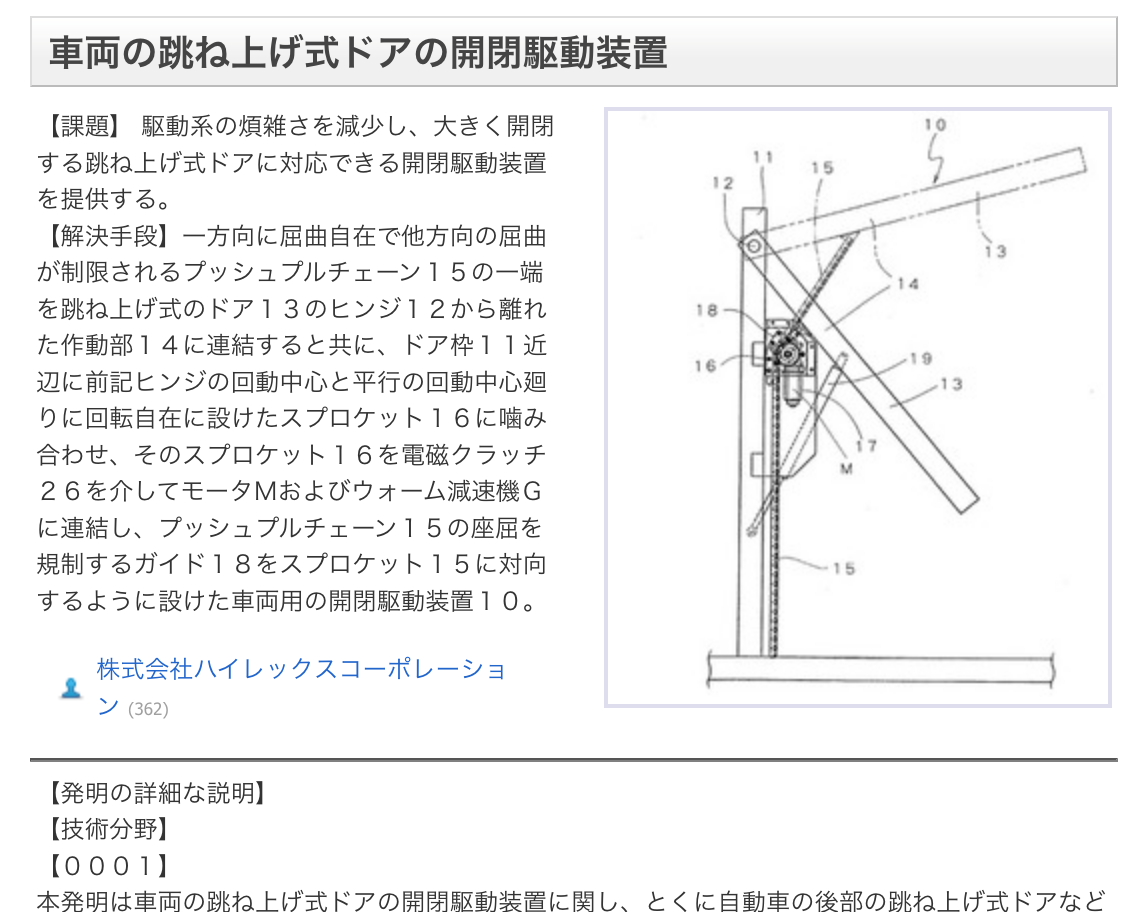
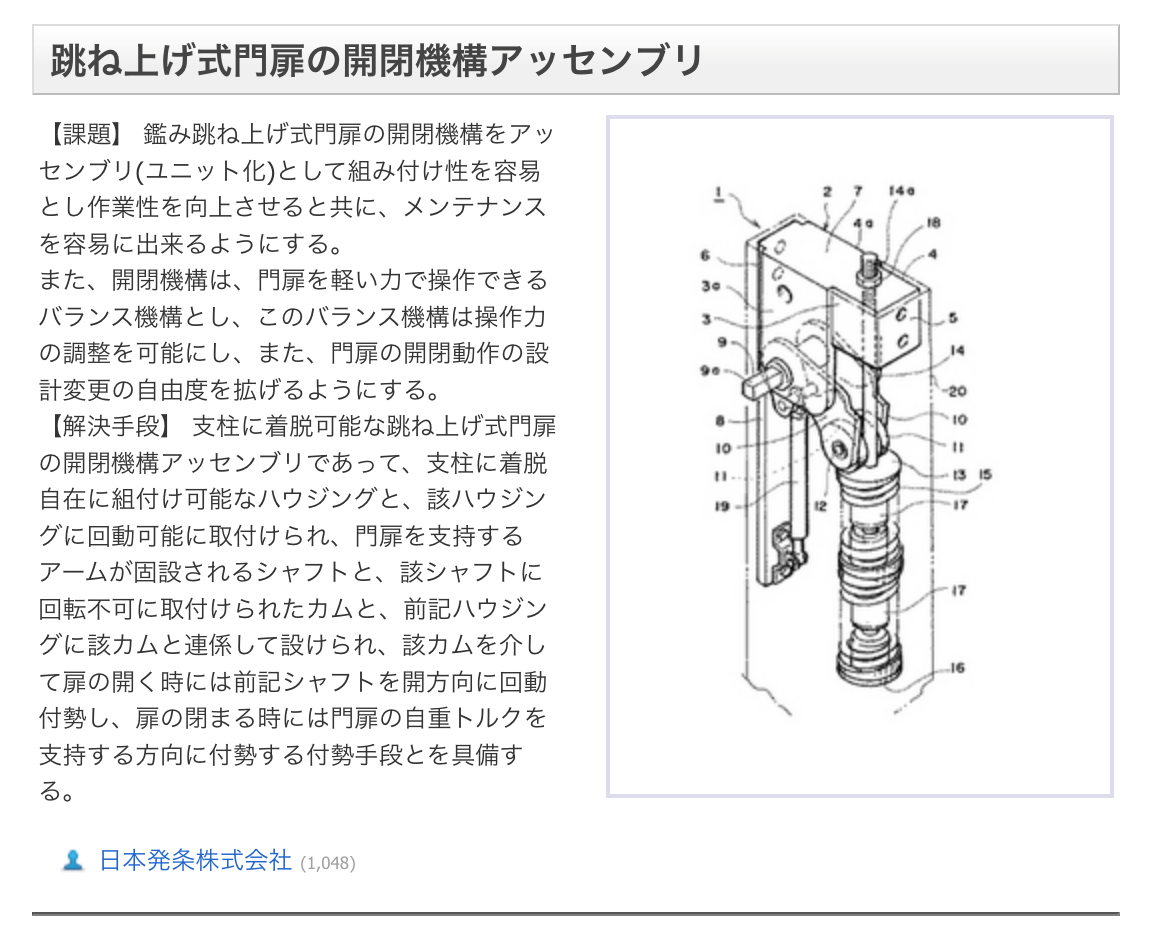
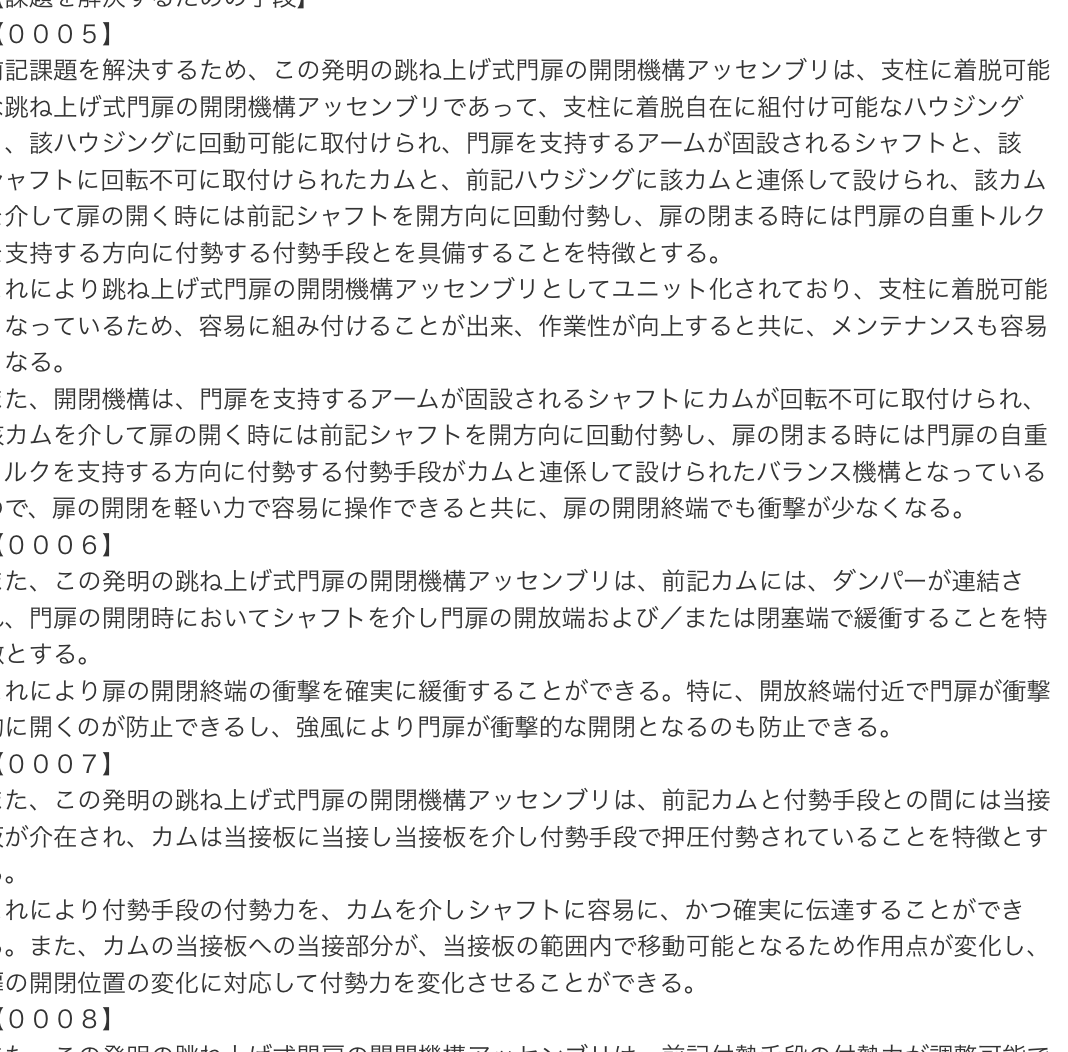
ググるとまあまあの特許が引っかかる。が、むずい。むずすぎる。
何が言いたいのかわからなくもないけどごめん全然わからないって感じ。
機構づくり
ばね作る
バネつけてそれを引っ掛けではずしたら良いのでは?使うのはサーボモーター
モーターつける台を作る
レーザーカッターで作る
音のセンサーと繋げる
うまくいかないモーター繋げるとモーターがひろう値が跳ね上がるなぜ??
原因は
同じ動力源をつかってたことが原因。もう1つのarduinoで分ける。
サーボを片方逆回転させる。
ぬいぐるみの皮をはぐ
さよなら綿
ばね作る
ボールペンのバネを使ってばね作る
バネだけだったら跳ねるけど
ぬいぐるみを動かすレベルの力じゃない、、、(泣)