Sumobot Jr
Sumobot Jr はオープンソースのロボットカーのキットです。
オリジナルから設計データを少し変更しています。
設計データやプログラムなどは Github で公開しています。
Raspberry Pi で制御するバージョンもあります。
部品
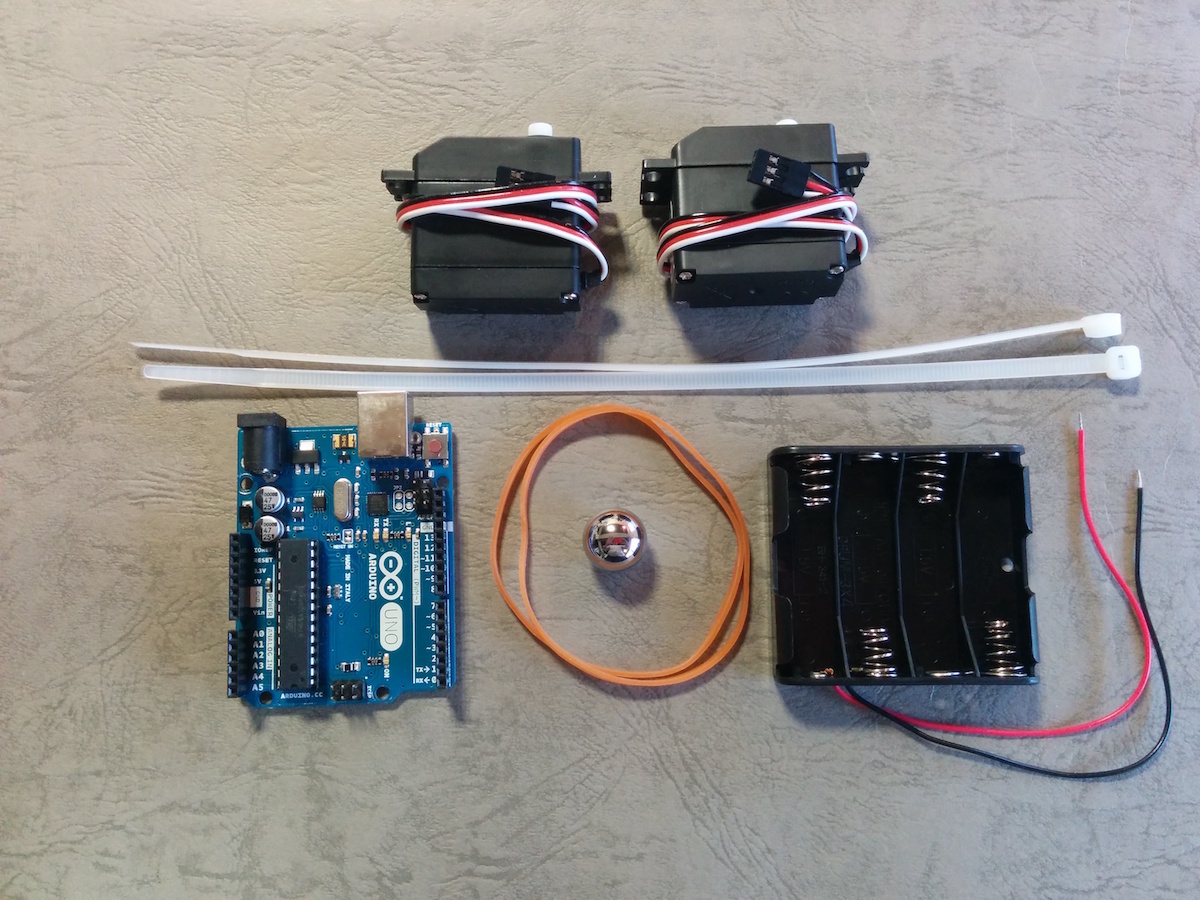
- Arduino Uno
- 電池ボックス (単三x4本)
- 単三電池 x 4本
- 連続回転サーボ SM-S4303R x 2個
- 16mm ボール
- ネジとナット M2.6x10mm x 12本、M2.6x15mm x 2本
- 結索バンド 20cm x 2本
- ゴムバンド #25 3mm幅 x 2本
- 線材 少々
- 厚紙
工具
- レーザー加工機
- 3Dプリンタ
- 半田ごて
- ドライバー
- ぺンチ
- ニッパー
- ワイヤーストりッパー
- キリ
- ハサミ

サーボの動作確認
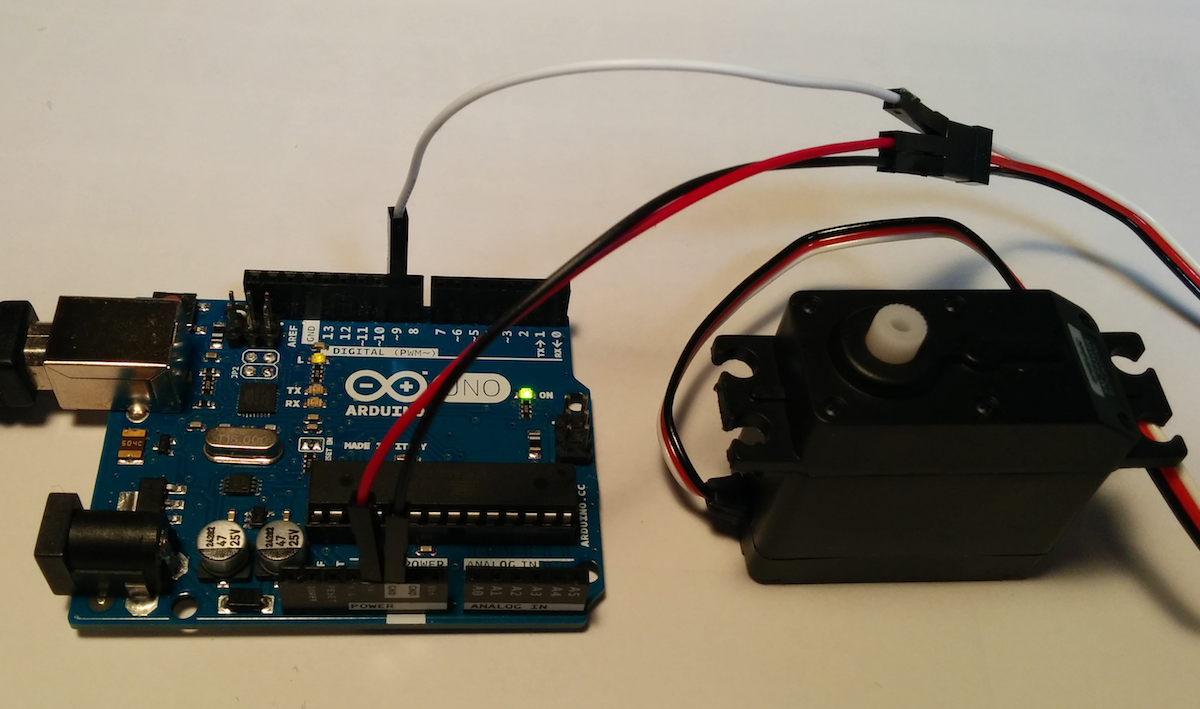
サーボが所望の動作をするか確認します。
特に、停止を指定したときに、ちゃんと停止しているかを確認します。
servo command
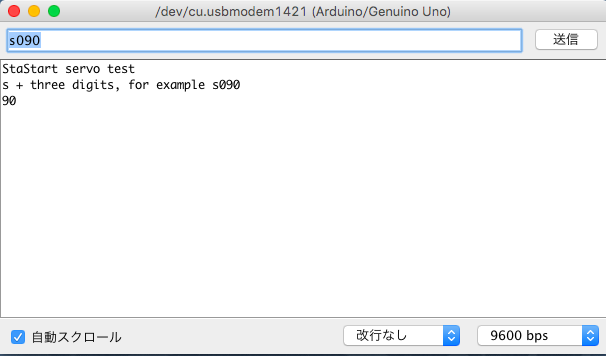
Arduino に servo_command を書き込みます。
シリアルモニタからコマンドを入力します。
コマンドの形式は、s + 3桁の数字です。
- s000 : 時計周り 高速
- s080 : 時計周り 低速
- s090 : 停止
- S100 : 反時計周り 低速
- s180 : 反時計周り 高速
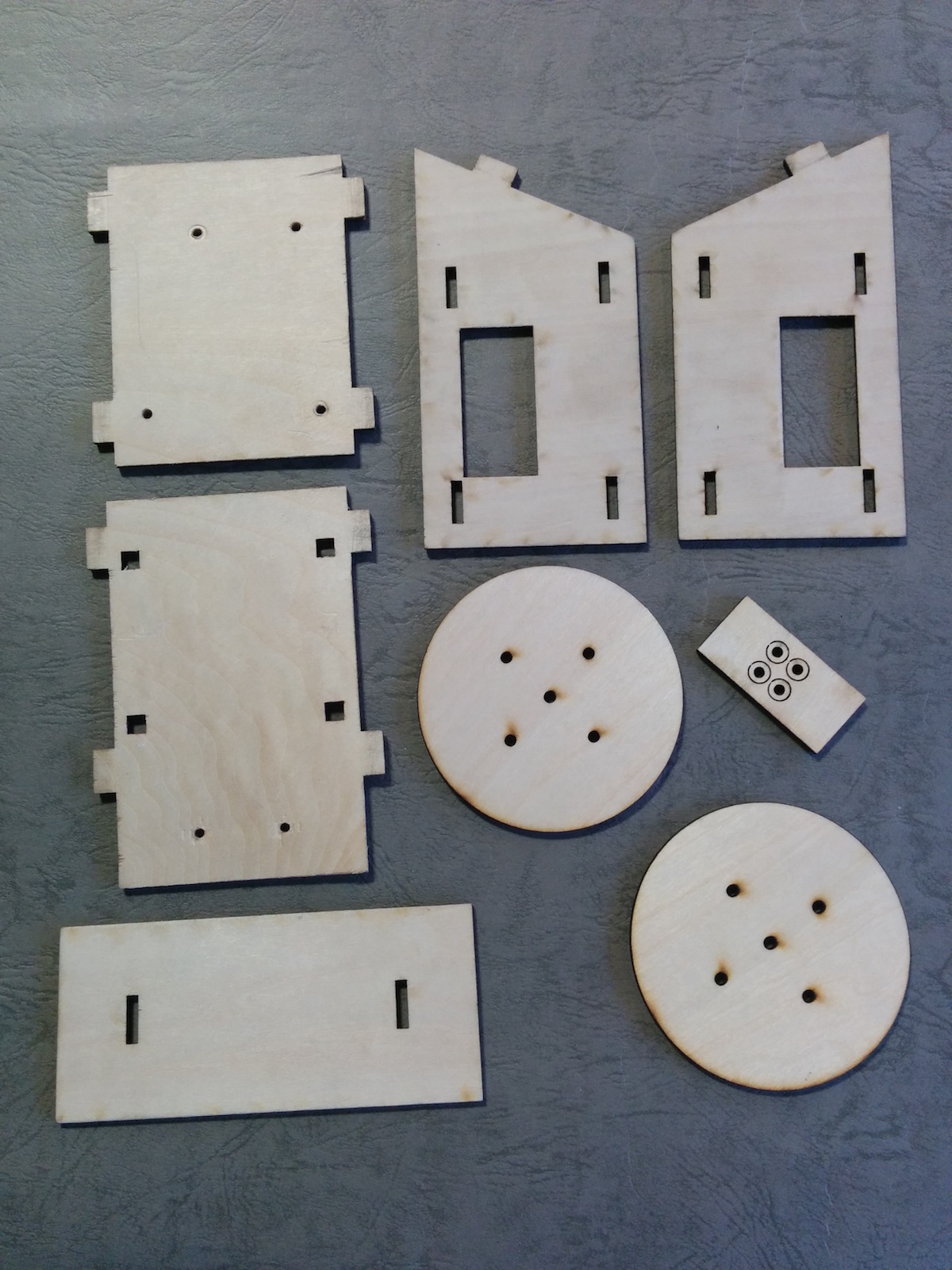
車体の組み立て
オリジナルのサイトで動画が公開されています。
その1

ボールキャスタの穴をキリでM2.6のネジが入るように大きくします
その2
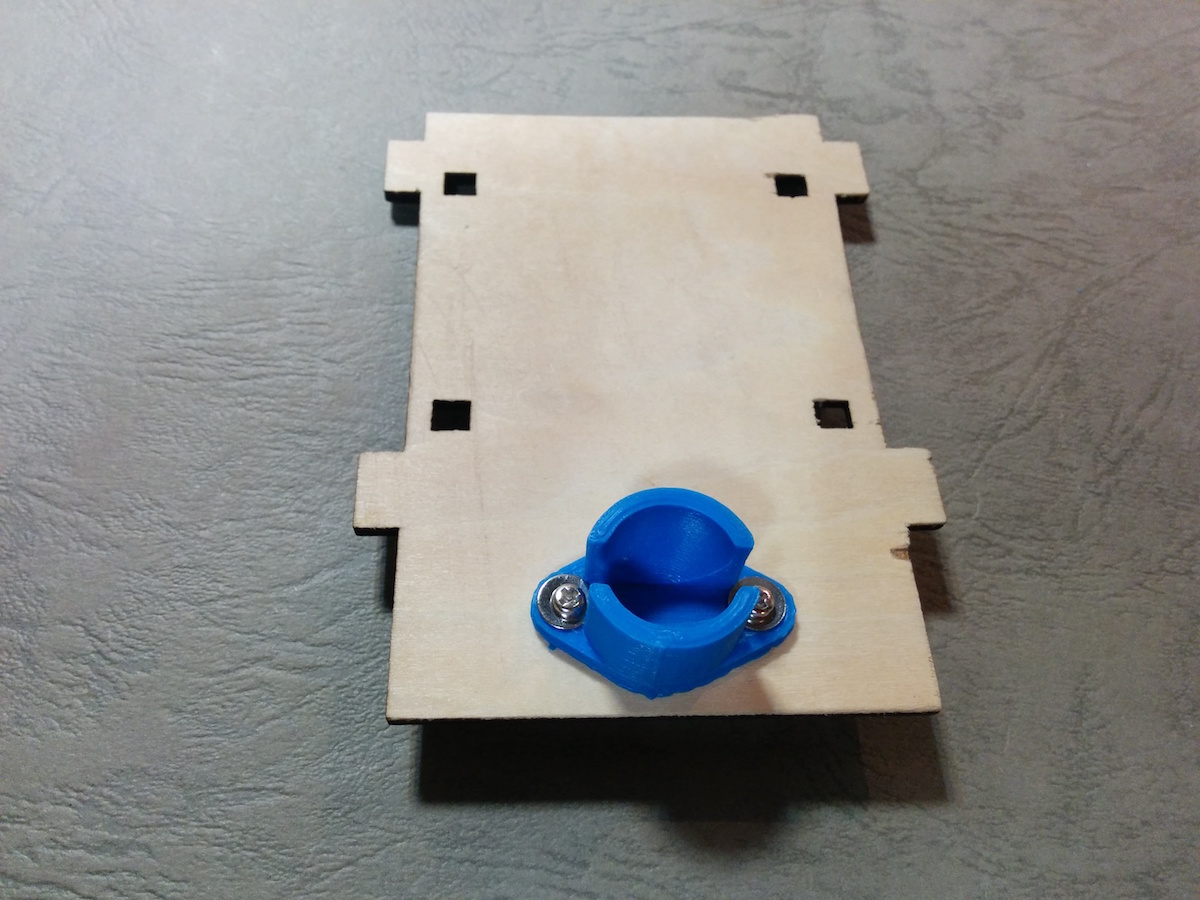
ボールキャスタを底板にネジで固定します
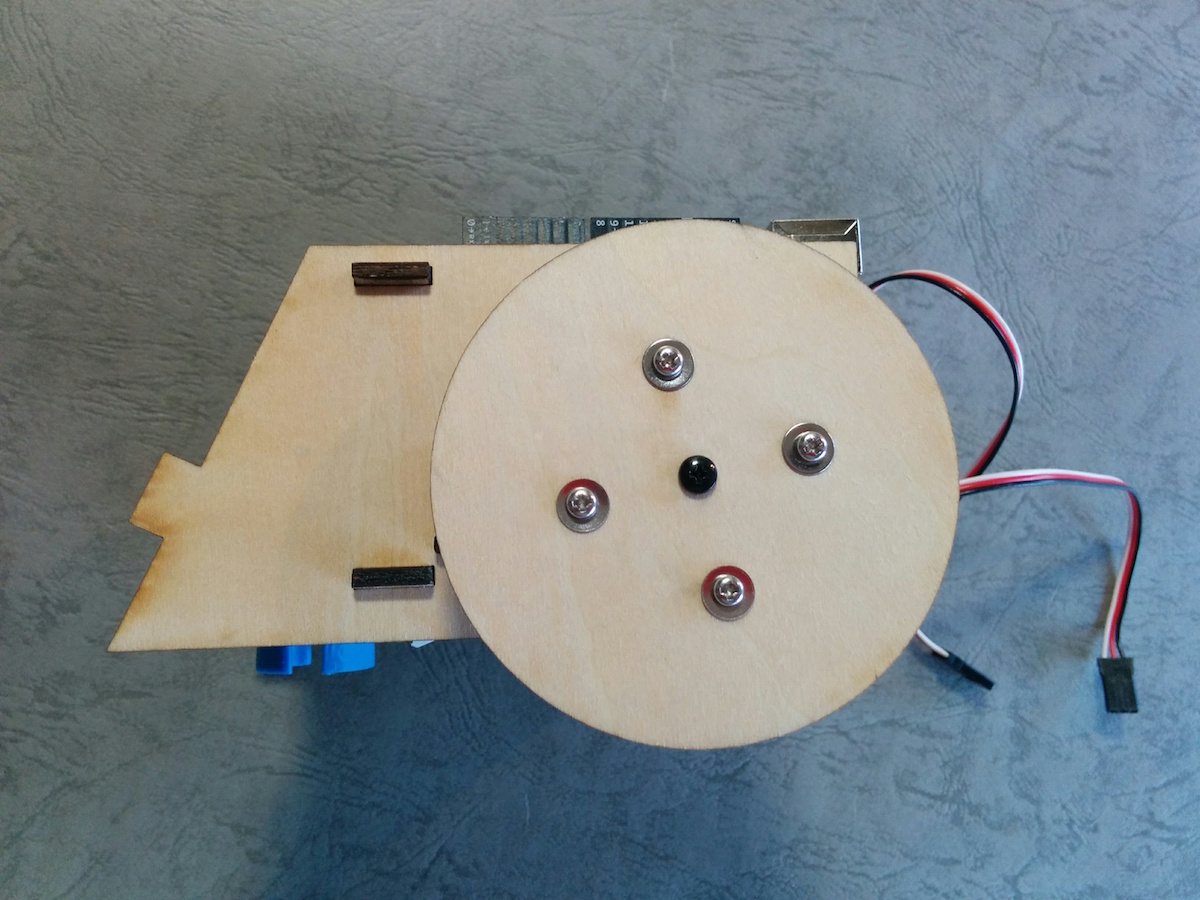
その3

サーボホーン (サーボの付属品) の穴をキリでM2.6のネジが入るように大きくします
その4

サーボホーンを車輪にネジで固定します
その5
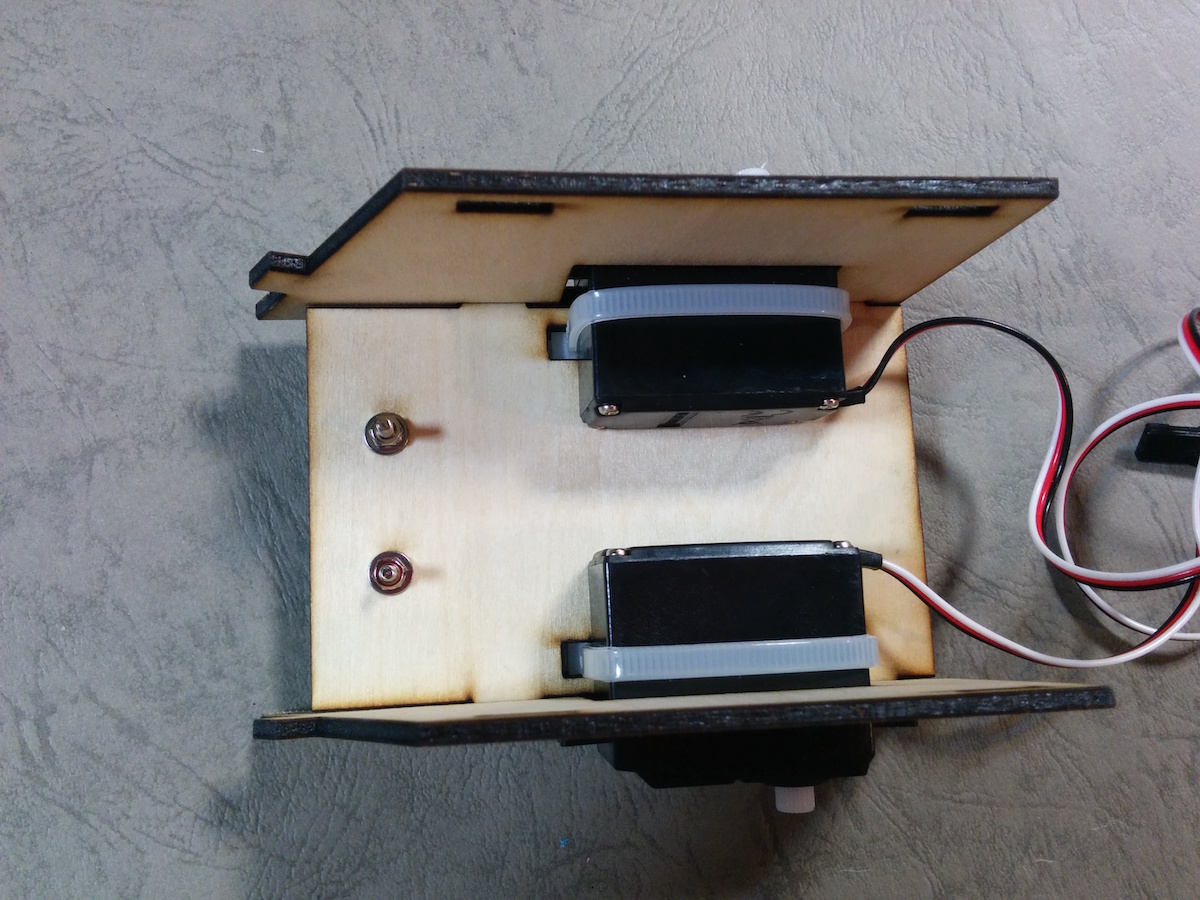
サーボを底板に結索バンドで固定します
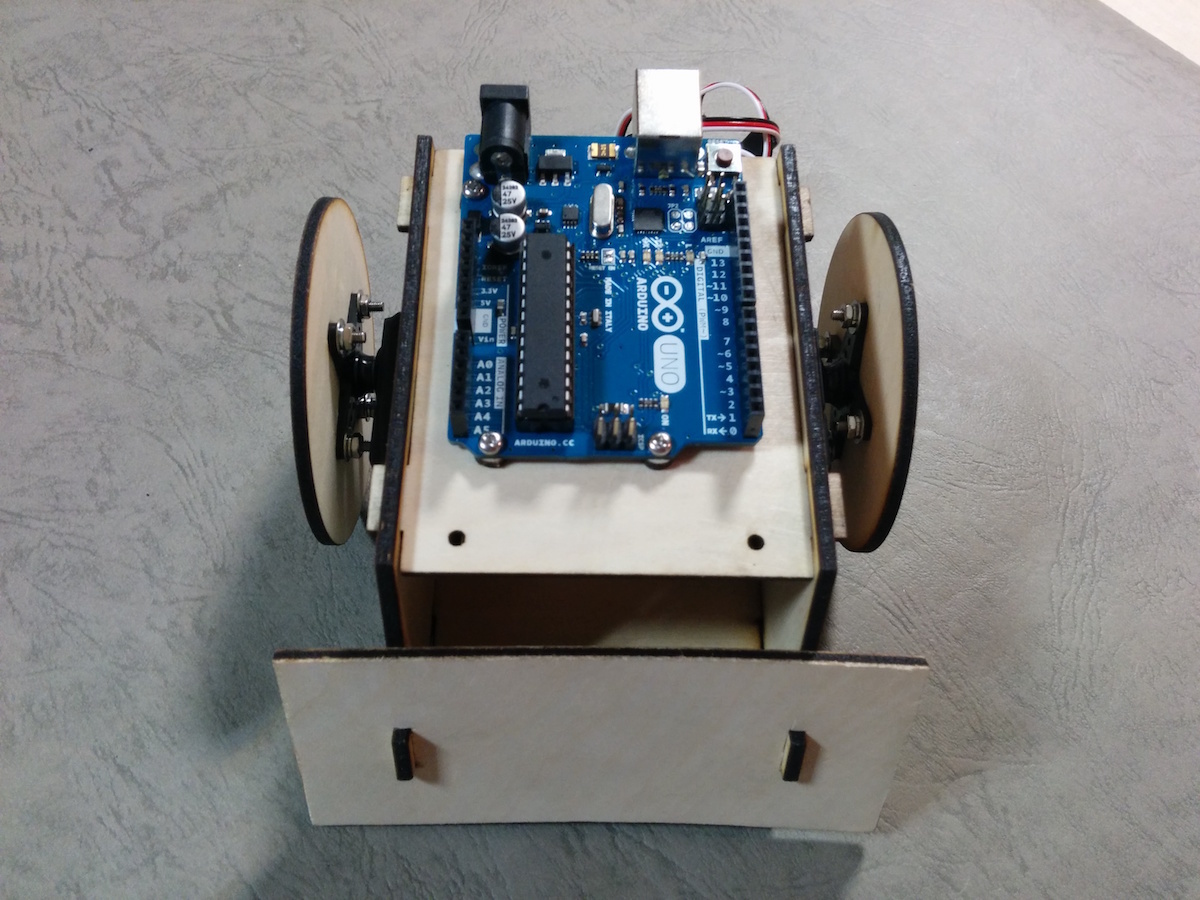
その6
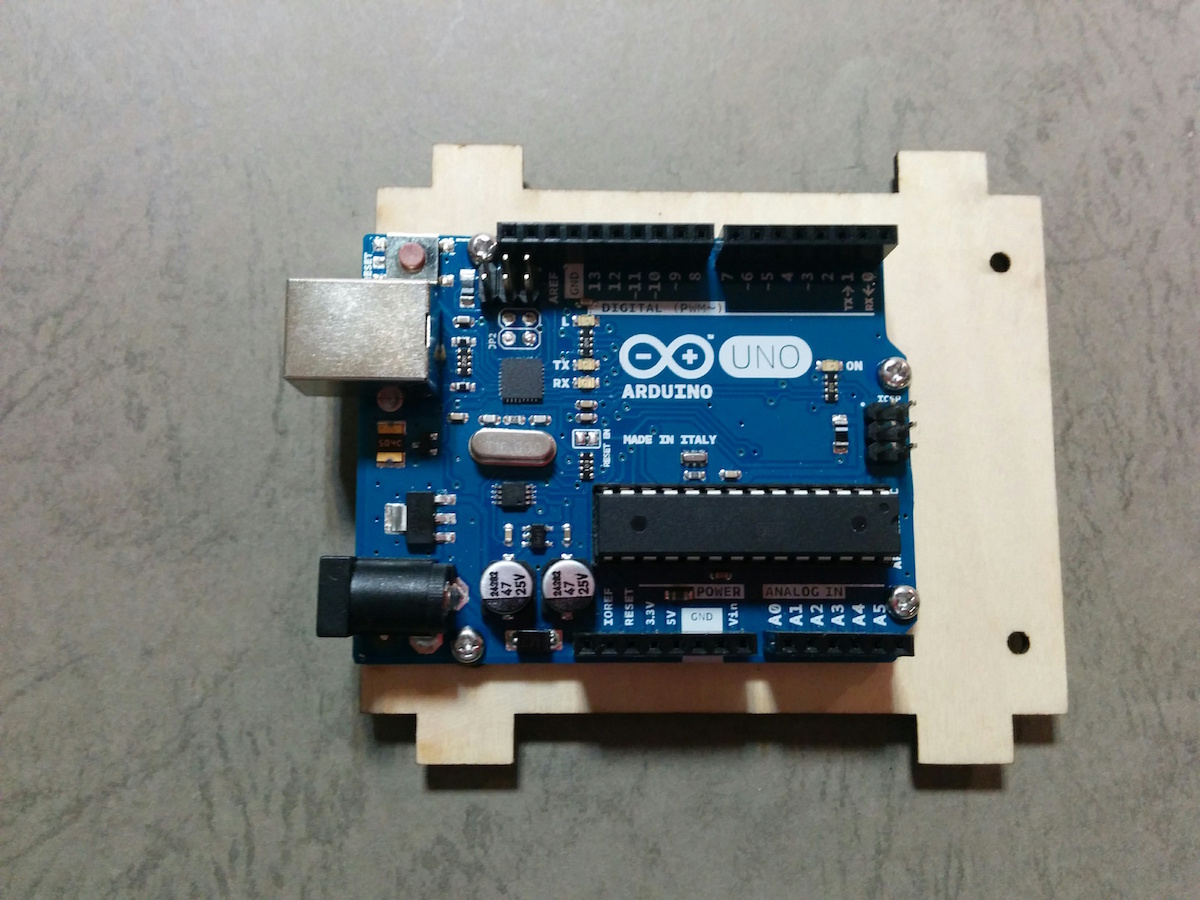
Arduino を上板にスペーサーをかましてネジで固定します
その7
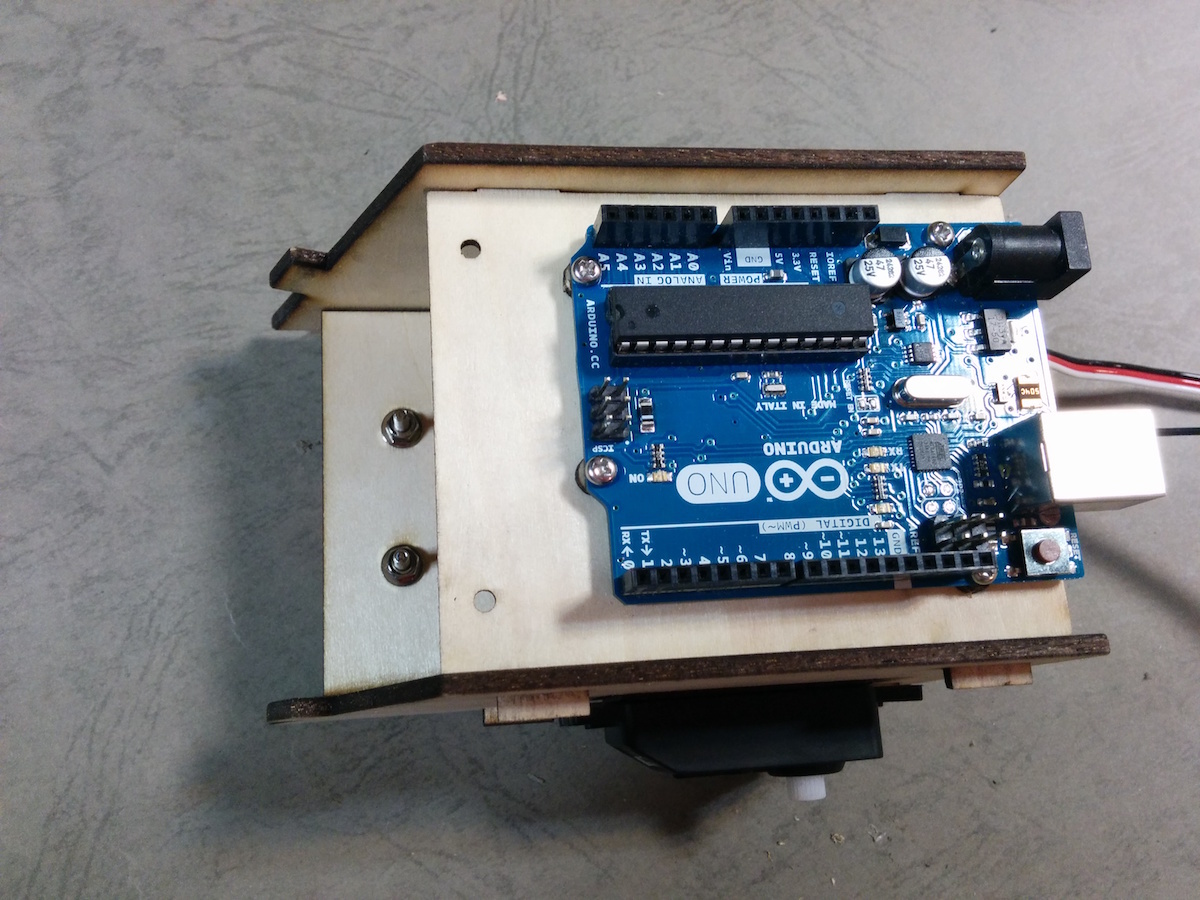
上板を車体に取り付けます
その8
車輪を車体に木ネジ (サーボの付属品) で取り付けます
その9
前板を車体に取り付けます
その10
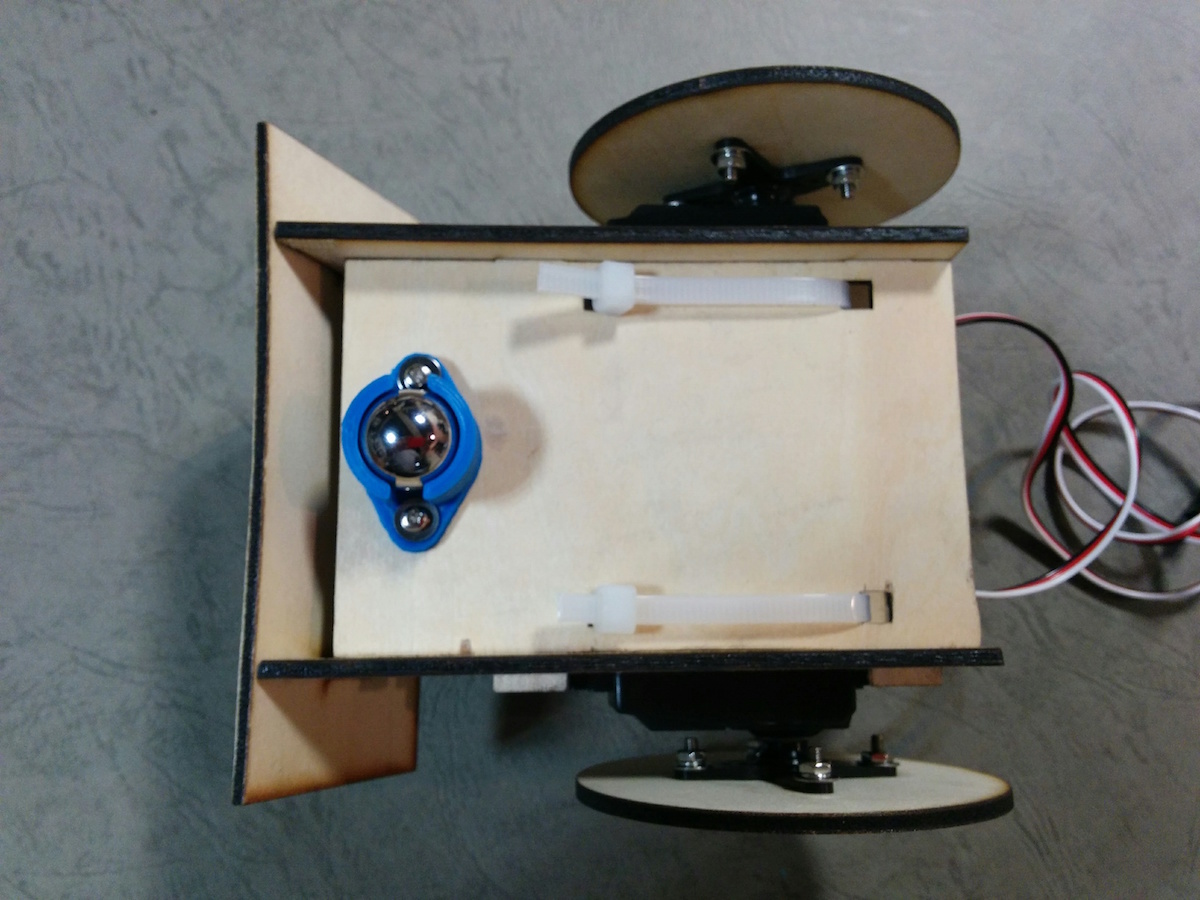
ボールをボールキャスタにはめ込みます
配線
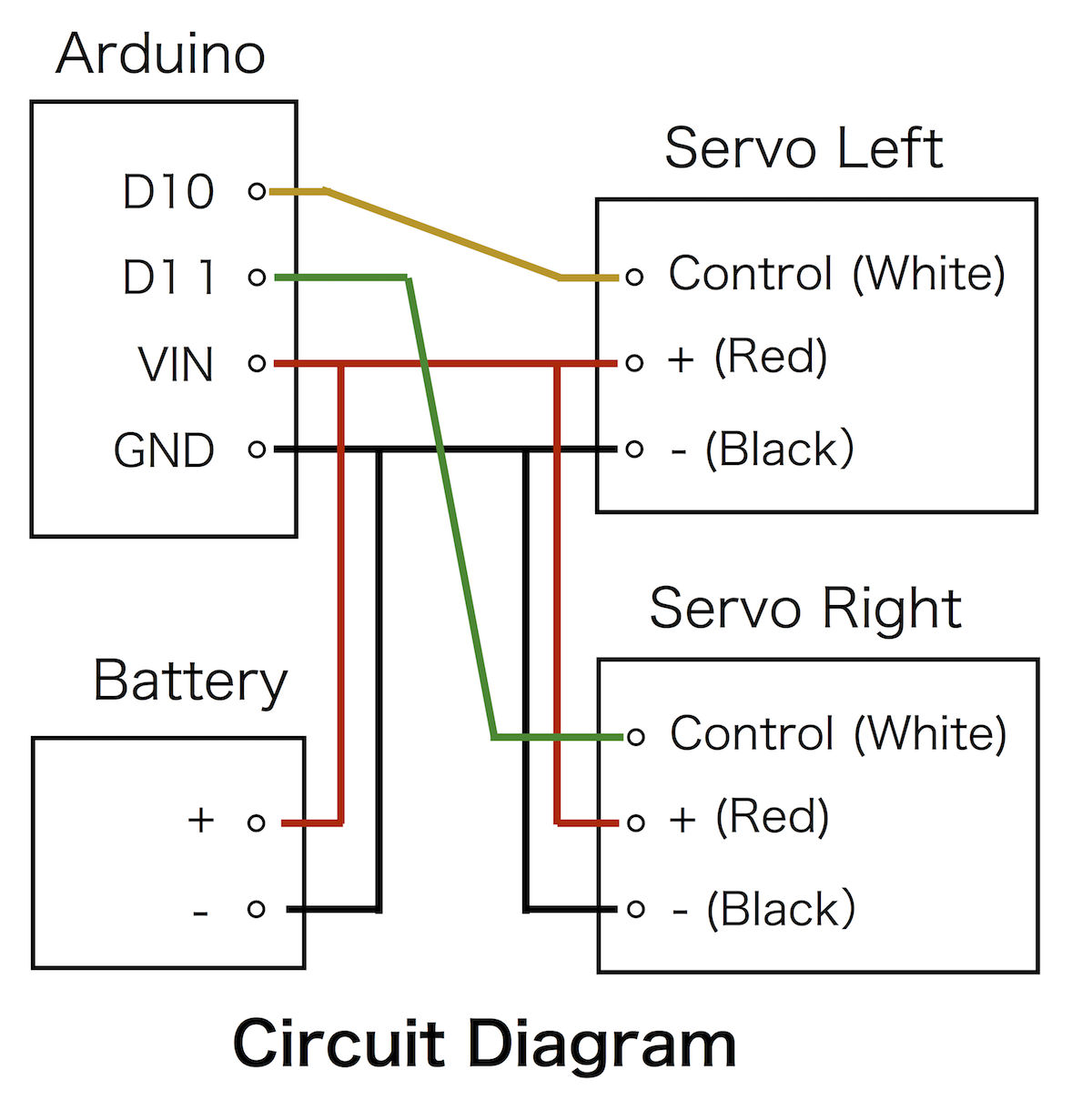
回路図
その1
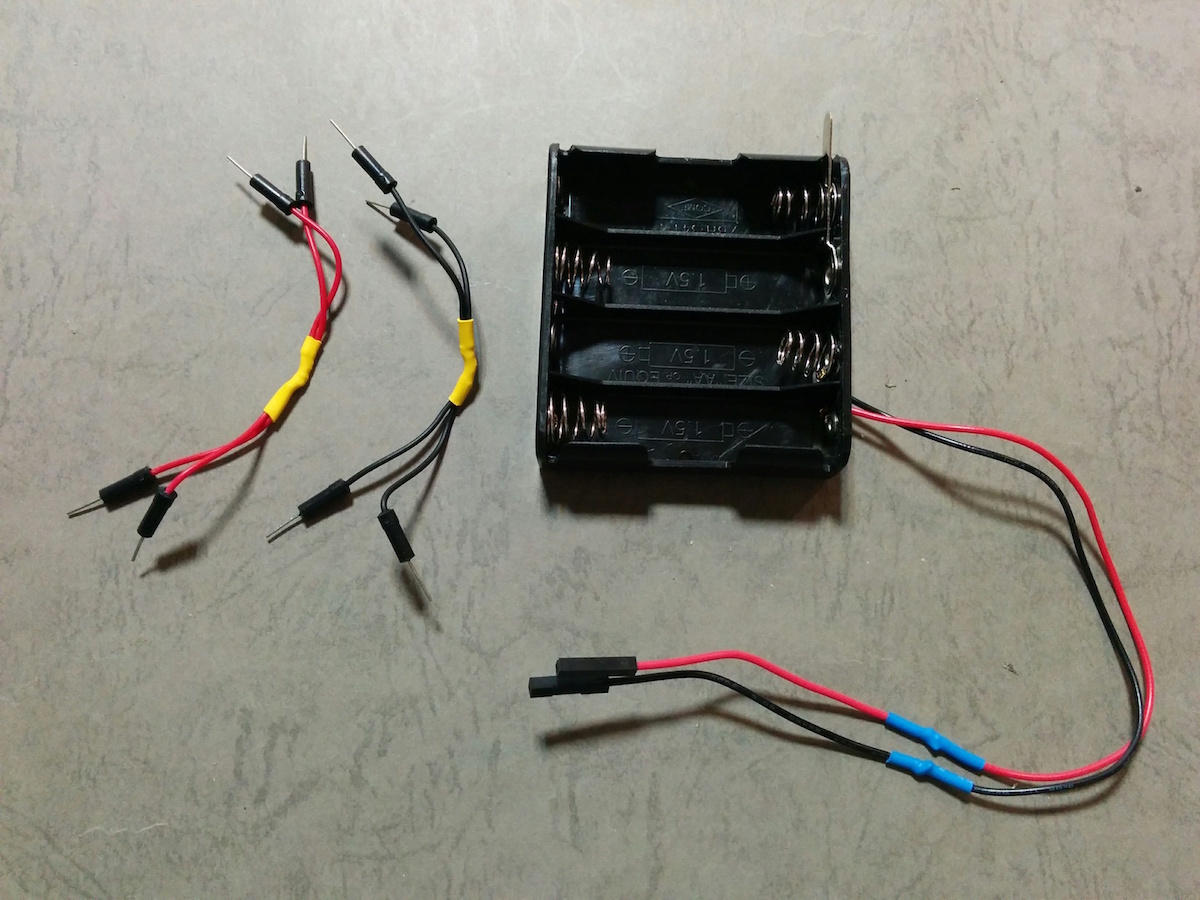
- 電池ボックスにメスのジャンパー線を半田付けします。
- オスのジャンパー線を半田付けして、4つ口にします。
その2
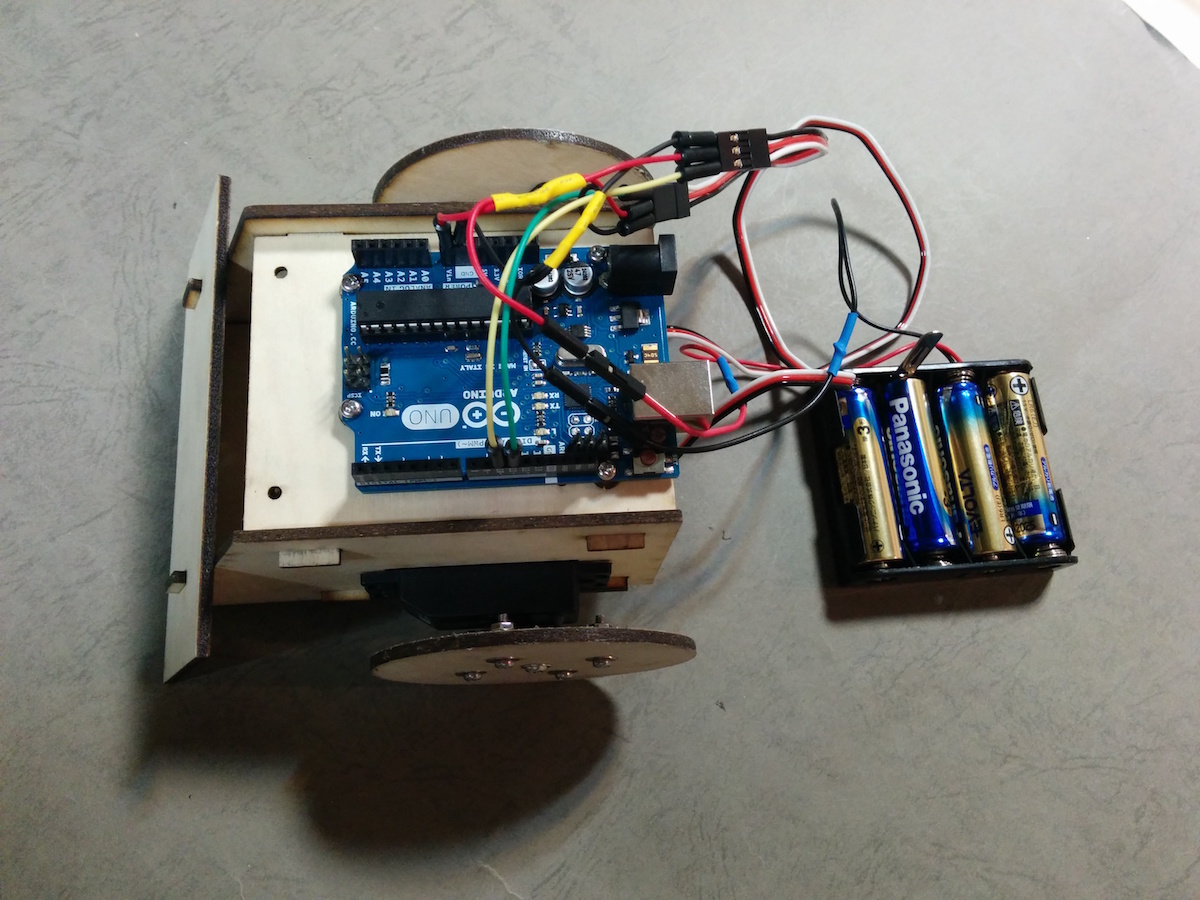
Arduinoと電池ボックスと2個のサーボを結線します
その3
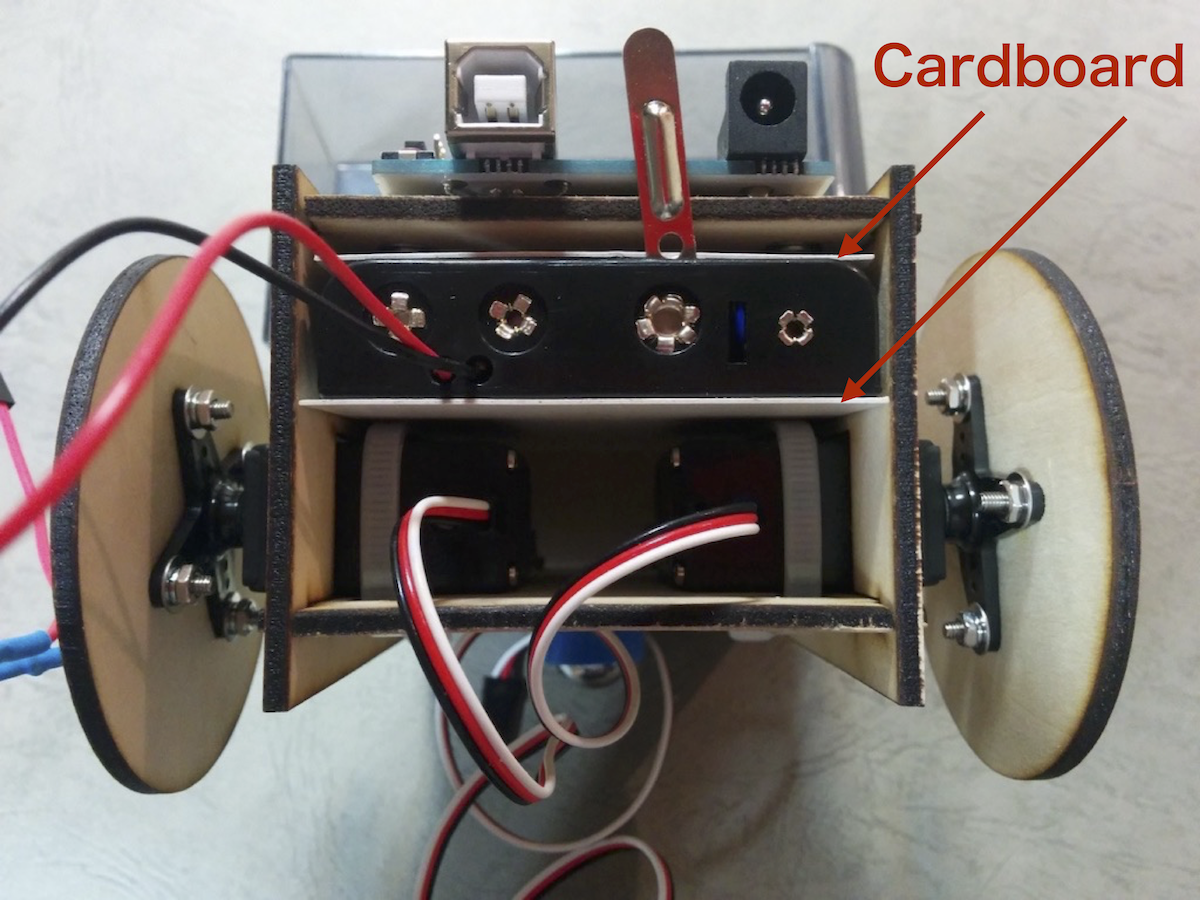
電池ボックスを車体に入れます。
電池ボックスの上下に厚紙を入れると、ほどよい感じで固定されます。
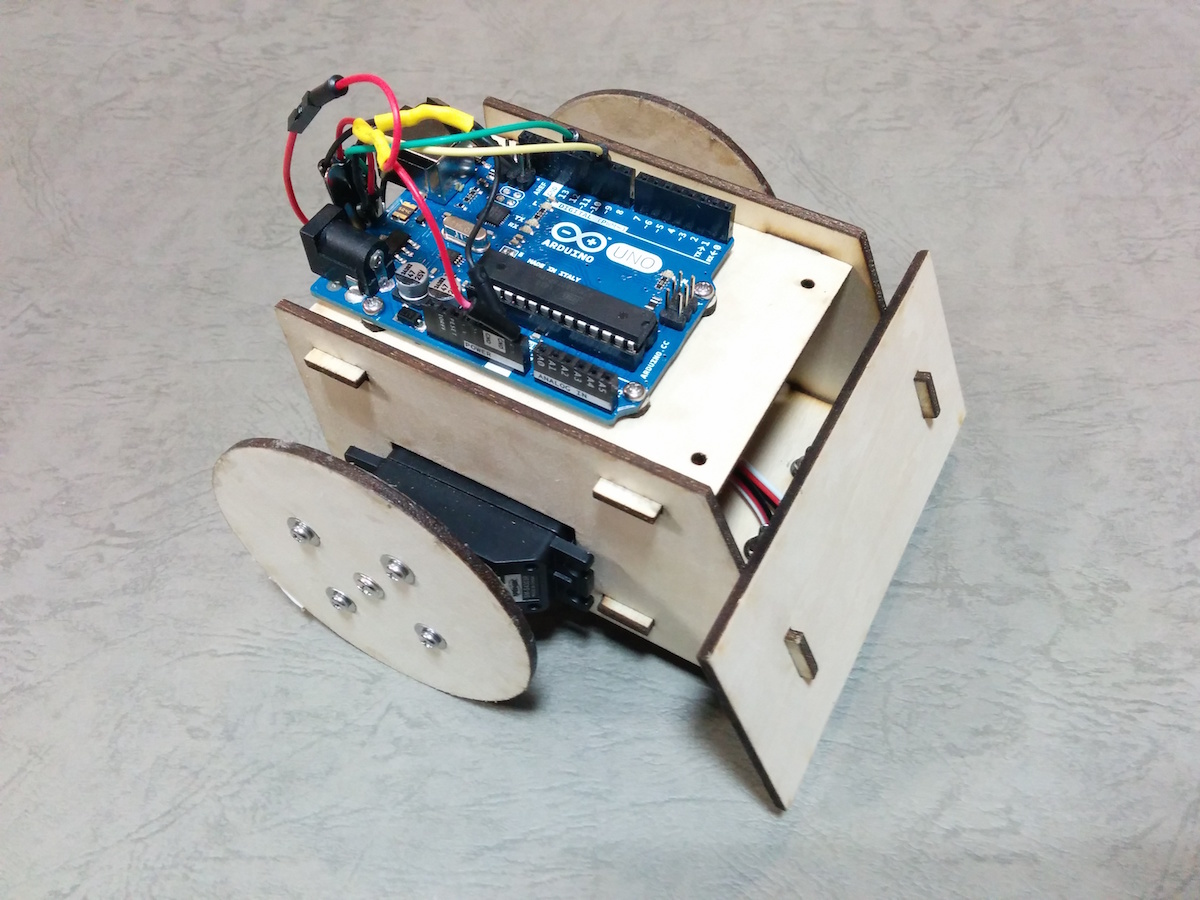
車体の完成
プログラム
課題
- ゴムバンドの固定方法
良い方法を見つかったら、ご一報ください。