Sumobot Jr
この記事は Sumobot Jr with Arduino の兄弟編です。
Sumobot Jr はオープンソースのロボットカーのキットです。
元々は Arduino 用に設計されているものですが、今回は Raspberry Pi で制御します。
オリジナルから設計データを少し変更しています。
設計データやプログラムなどは Github で公開しています。
部品
- Raspberry Pi 2 B
- モバイルバッテリ
- 連続回転サーボ SM-S4303R x 2個
- 16mm ボール
- ネジとナット M2.6x10mm x 12本、M2.6x15mm x 2本
- 結索バンド 20cm x 2本
- ゴムバンド #25 3mm幅 x 2本
- 線材 少々
工具
- レーザー加工機
- 3Dプリンタ
- 半田ごて
- ドライバー
- ぺンチ
- ニッパー
- ワイヤーストりッパー
- キリ
- ハサミ
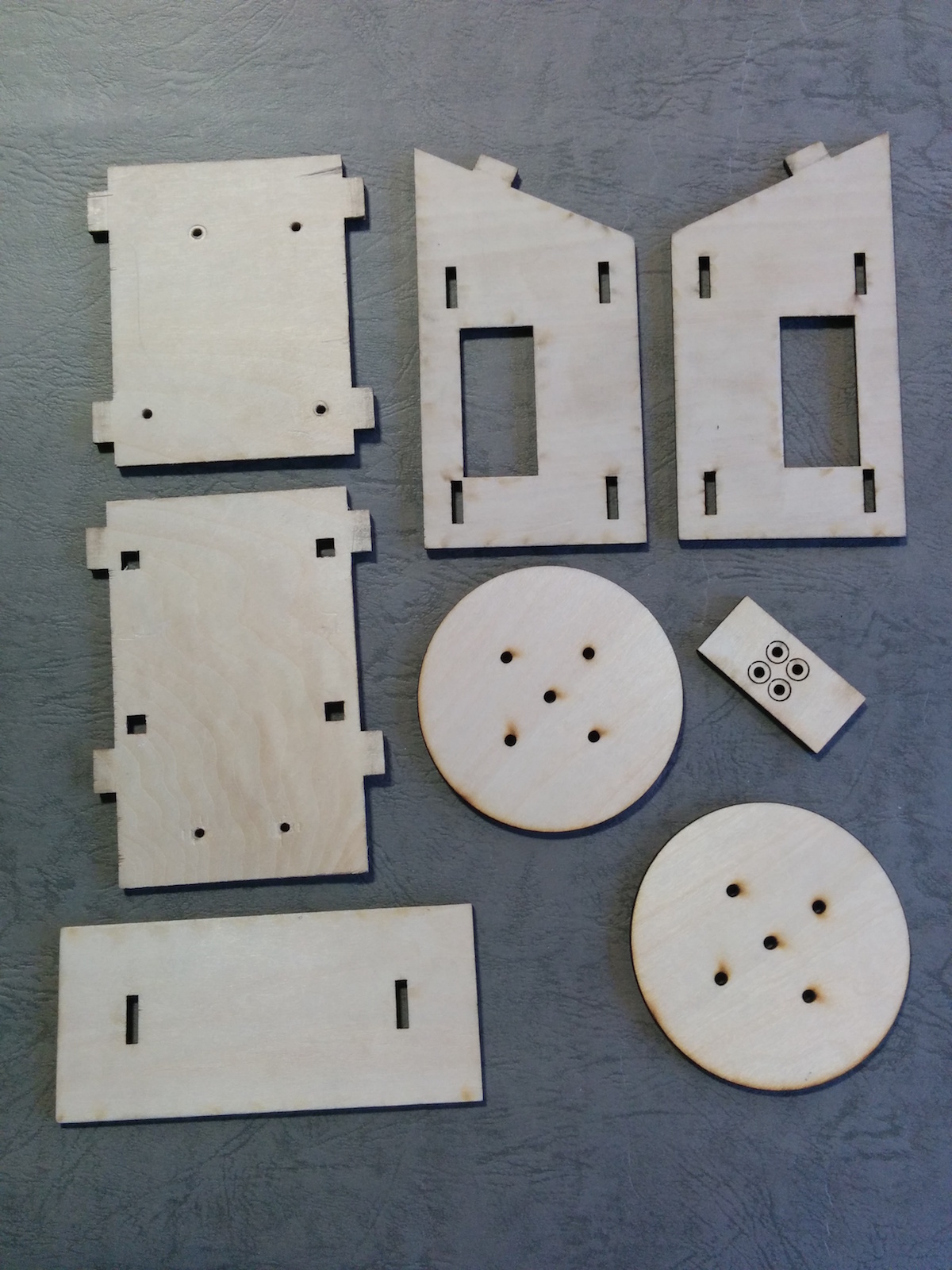

車体の組み立て

車体の作り方は、Arduino版 と同じです。
違うのは、上板に Arduino ではなくラズパイを固定すること。
配線
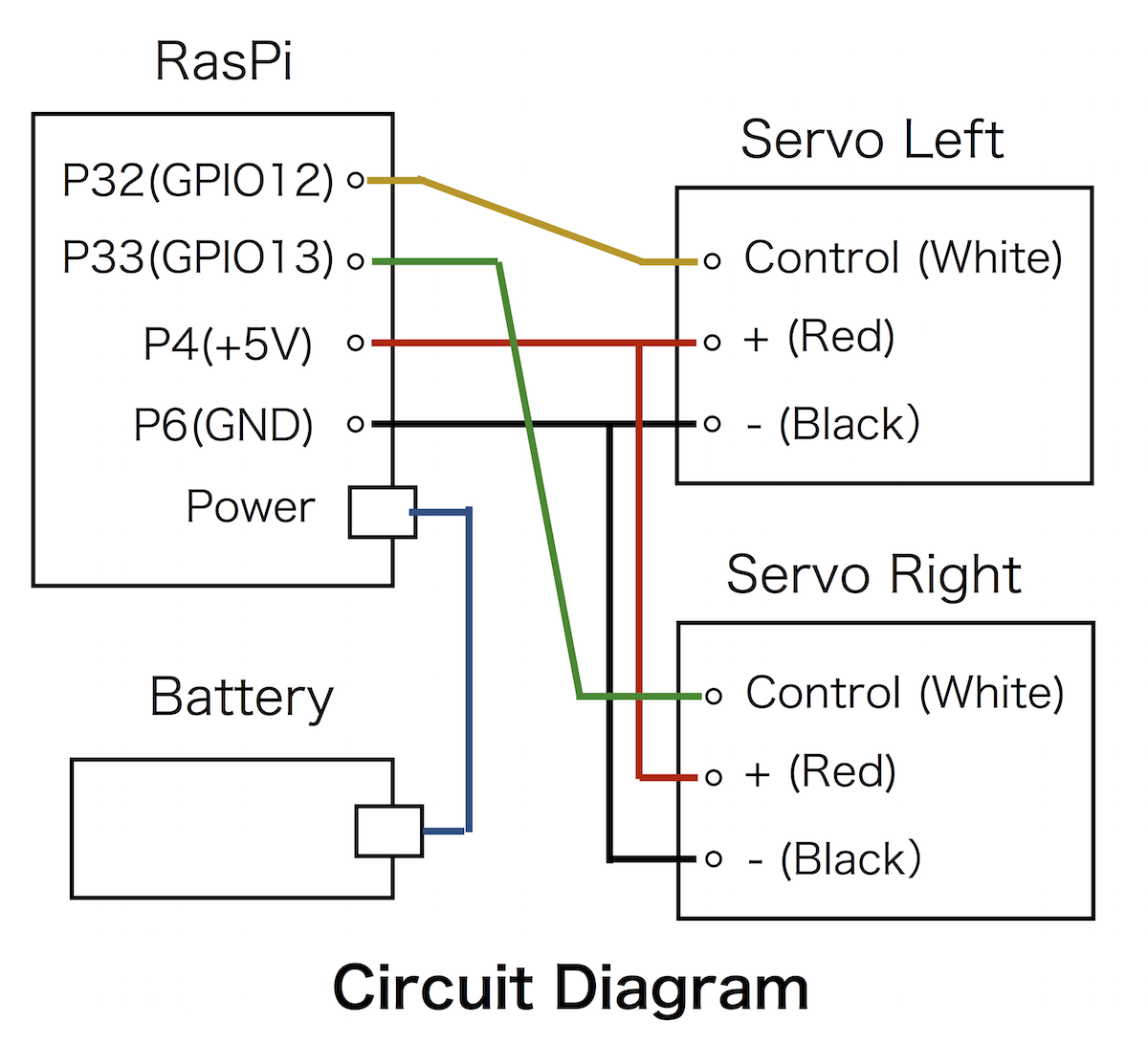
回路図
その1
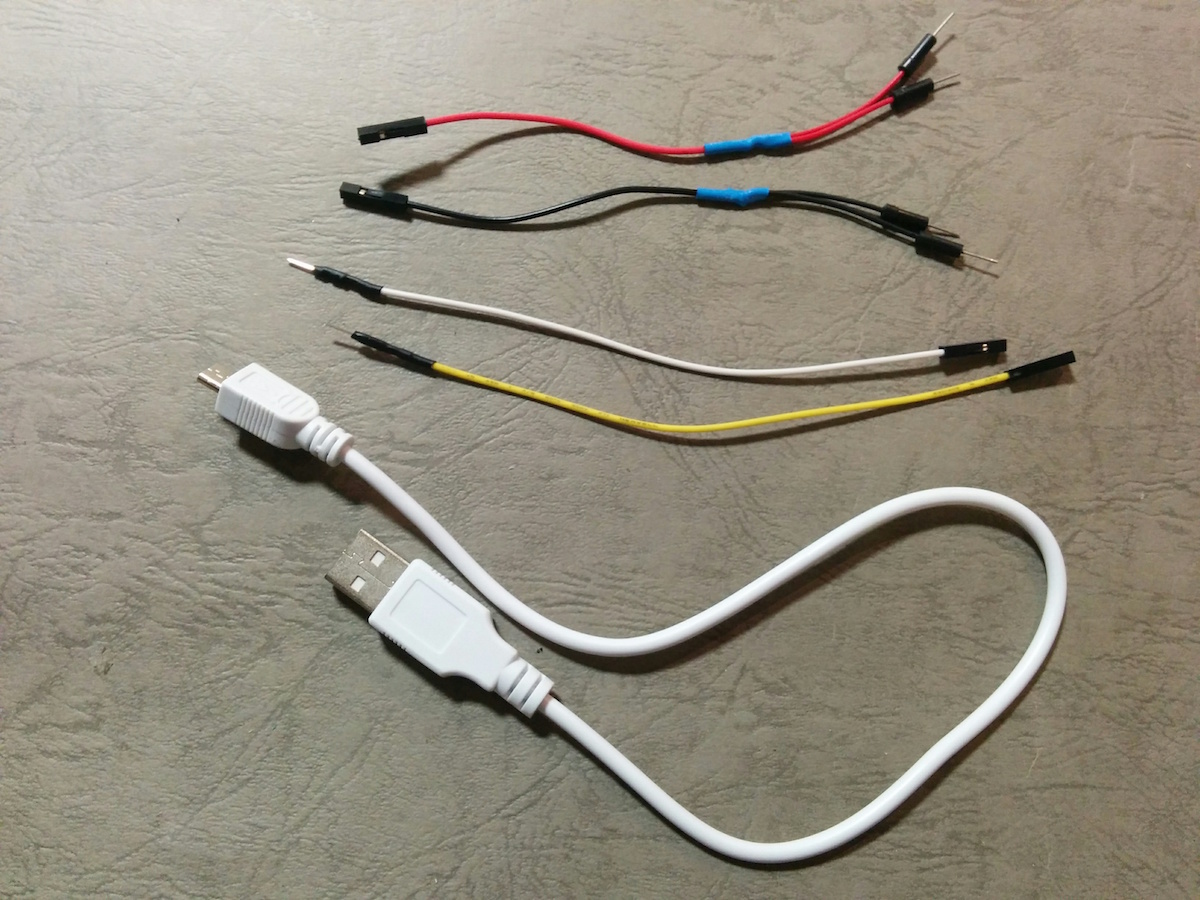
オスとメスのジャンパー線を半田付けして、オス2口とメス1口のジャンパー線にします。
その2
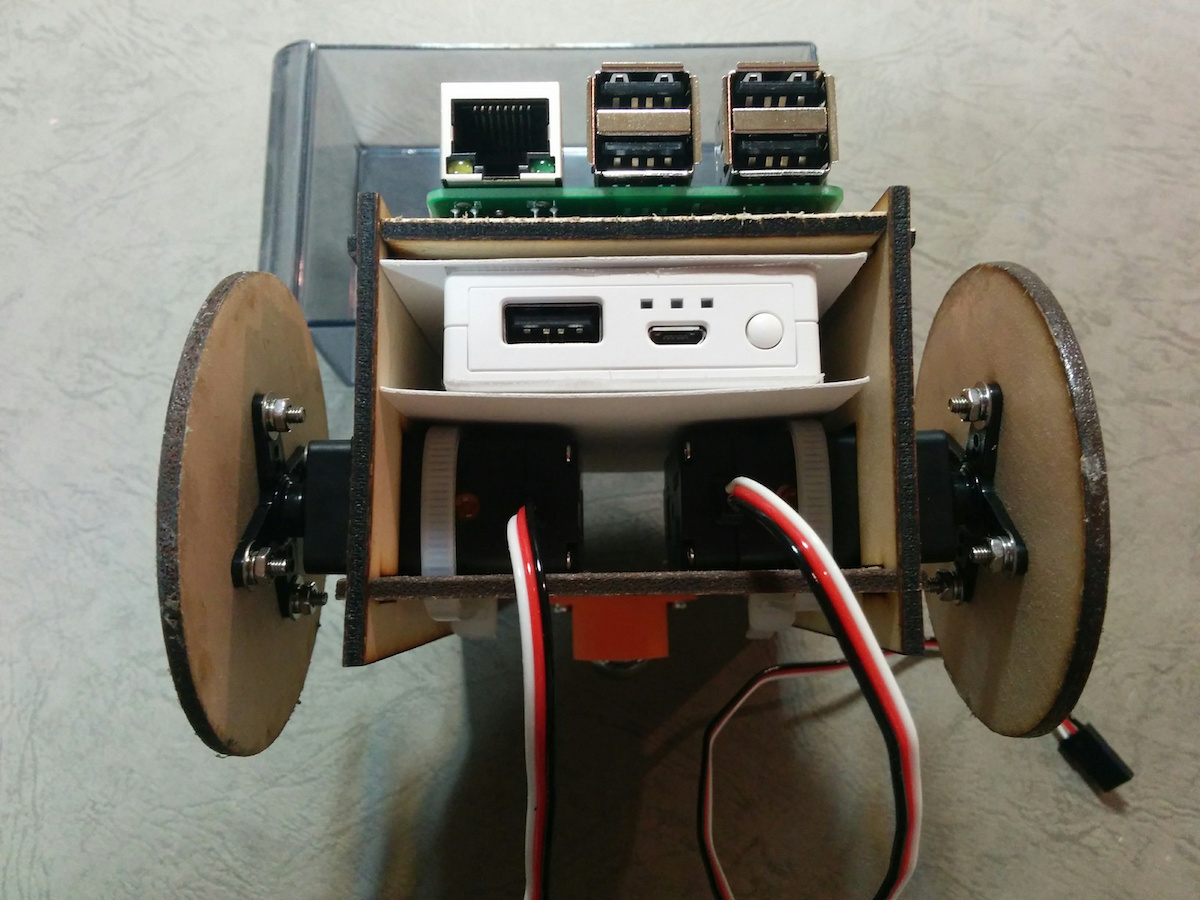
モバイルバッテリーを車体に入れます。
モバイルバッテリーの上下に厚紙を入れると、ほどよい感じで固定されます。
モバイルバッテリーの上下に厚紙を入れると、ほどよい感じで固定されます。
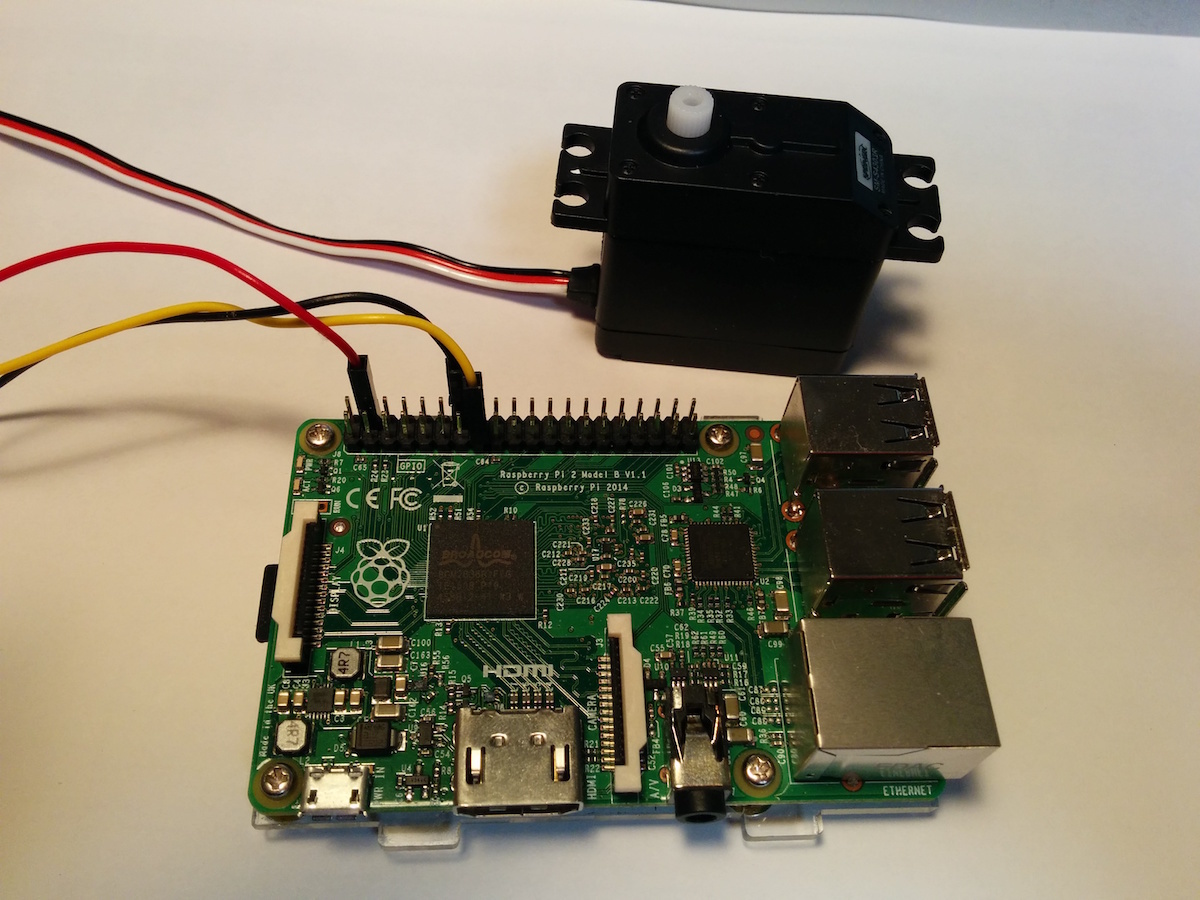
その3
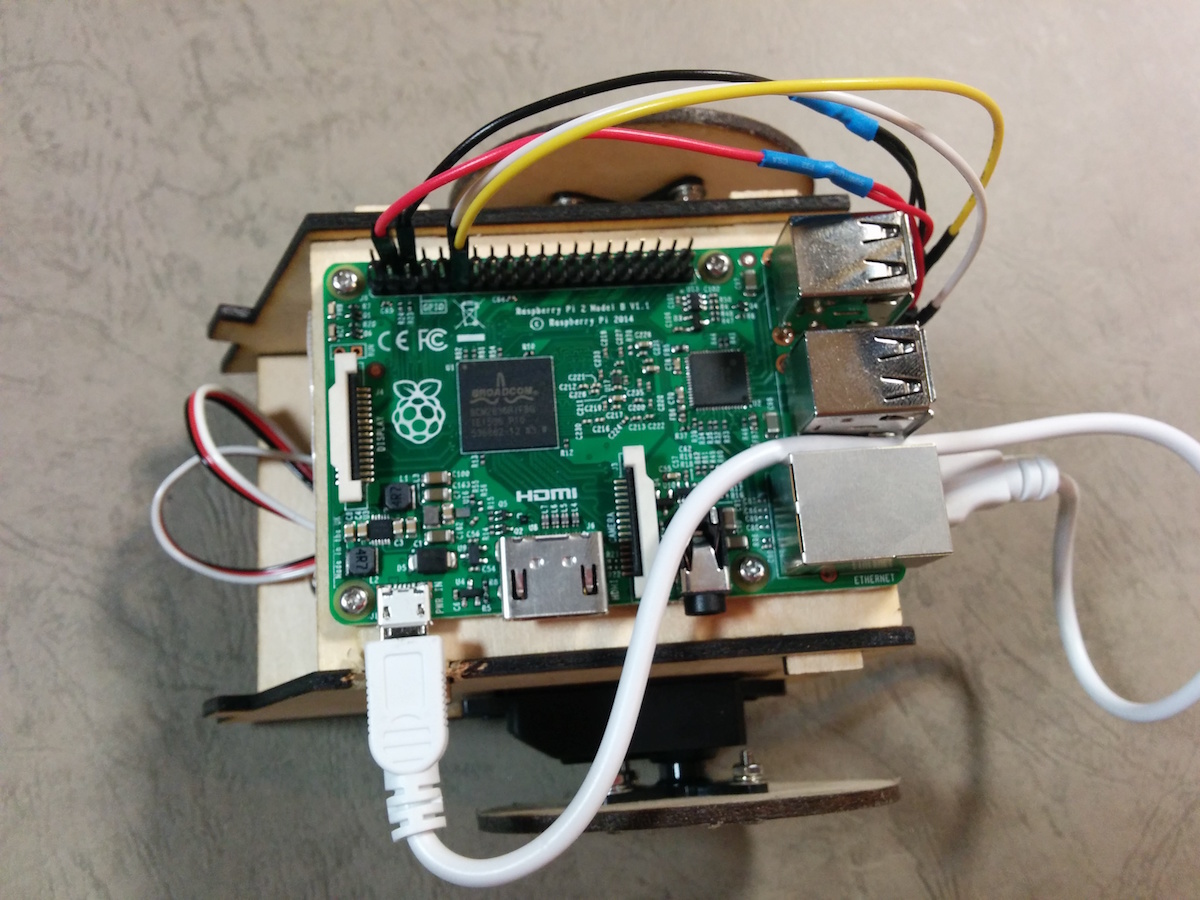
ラズパイと2個のサーボを結線します。ラズパイとモバイルバッテリーを結線します。
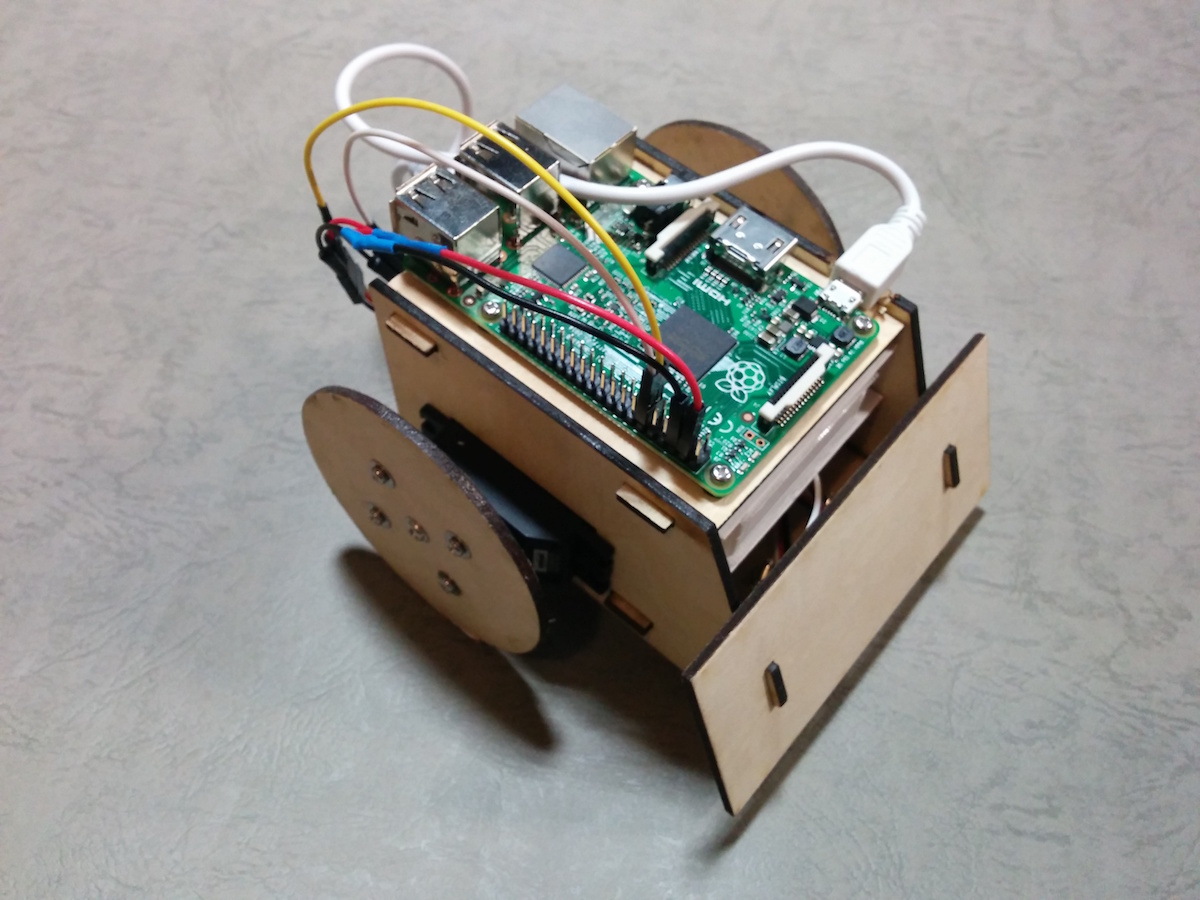
車体の完成
課題
スペーサが3mm厚では足りなかった。
10mmくらい必要です。
10mmくらい必要です。
その1
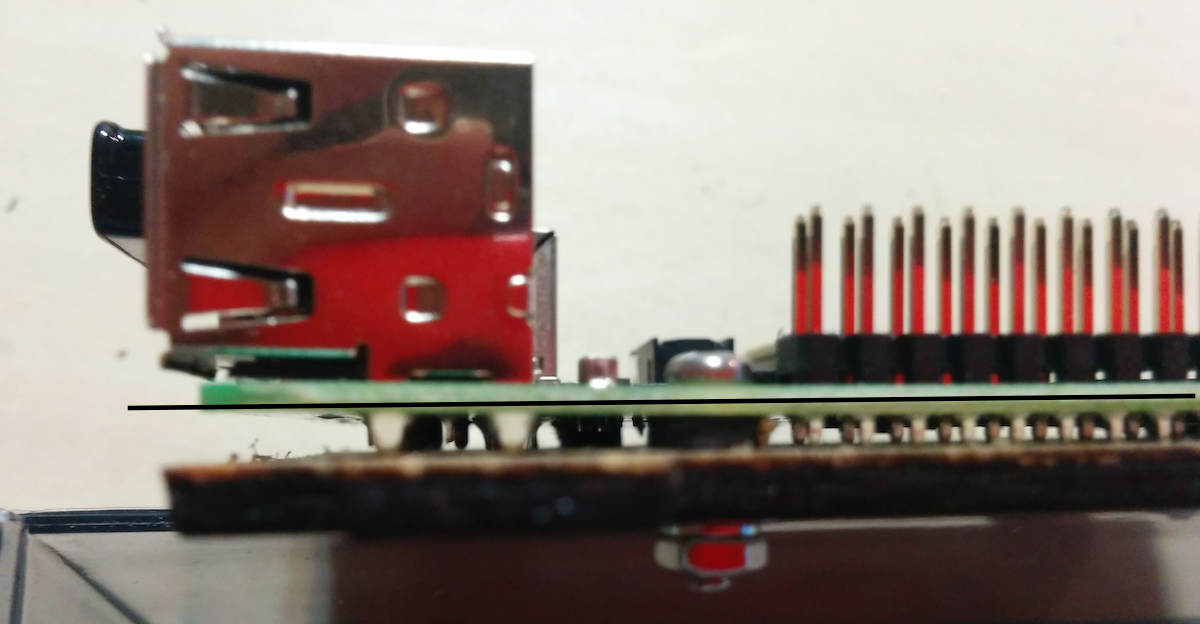
上板にラズパイを固定すると、コネクタの足があたり、基板がしなります。
どうやら、木材のスペーサだと、締め付けると、潰れるようです。
その2
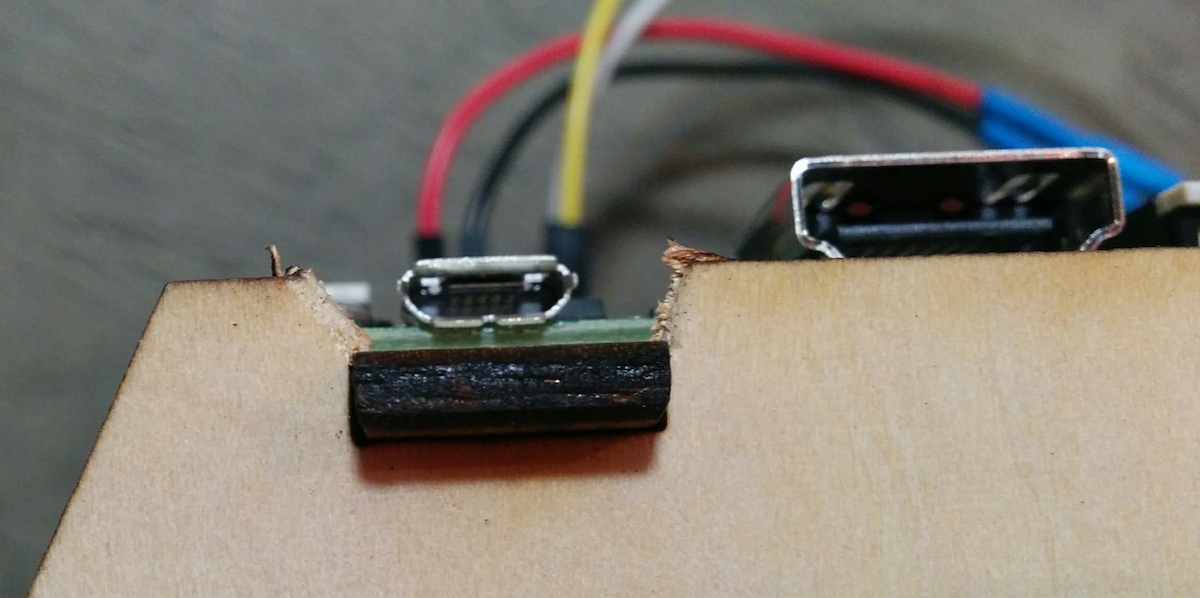
ラズパイに電源ケーブルを挿す時に、横板が邪魔になり、ケーブルが挿さりません。
応急処置として、横板を切断しました。
応急処置として、横板を切断しました。