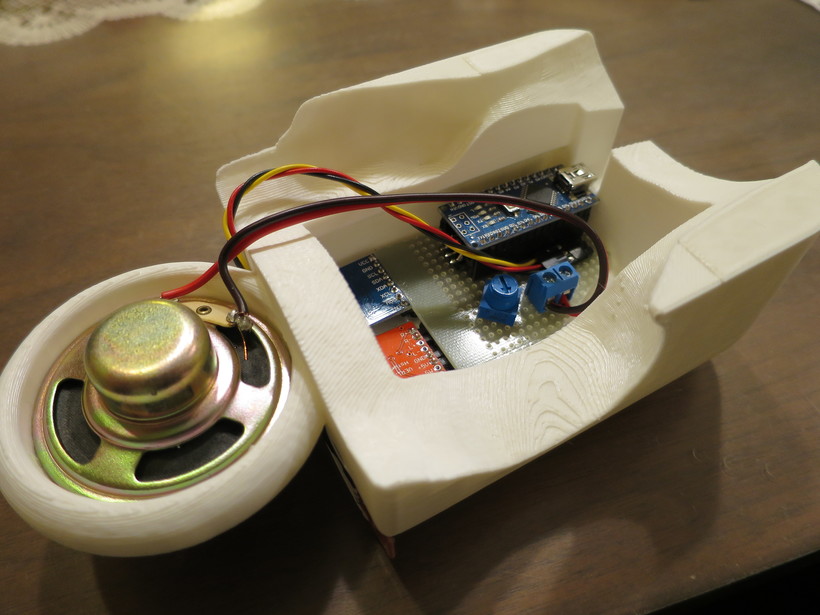

プログラム(800行を超えるので参考までに)
posted by  toshirobo on October 16, 2017
toshirobo on October 16, 2017
toshirobo on October 16, 2017#define NOTE_B0 31
#define NOTE_C1 33
#define NOTE_CS1 35
#define NOTE_D1 37
#define NOTE_DS1 39
#define NOTE_E1 41
#define NOTE_F1 44
#define NOTE_FS1 46
#define NOTE_G1 49
#define NOTE_GS1 52
#define NOTE_A1 55
#define NOTE_AS1 58
#define NOTE_B1 62
#define NOTE_C2 65
#define NOTE_CS2 69
#define NOTE_D2 73
#define NOTE_DS2 78
#define NOTE_E2 82
#define NOTE_F2 87
#define NOTE_FS2 93
#define NOTE_G2 98
#define NOTE_GS2 104
#define NOTE_A2 110
#define NOTE_AS2 117
#define NOTE_B2 123
#define NOTE_C3 131
#define NOTE_CS3 139
#define NOTE_D3 147
#define NOTE_DS3 156
#define NOTE_E3 165
#define NOTE_F3 175
#define NOTE_FS3 185
#define NOTE_G3 196
#define NOTE_GS3 208
#define NOTE_A3 220
#define NOTE_AS3 233
#define NOTE_B3 247
#define NOTE_C4 262
#define NOTE_CS4 277
#define NOTE_D4 294
#define NOTE_DS4 311
#define NOTE_E4 330
#define NOTE_F4 349
#define NOTE_FS4 370
#define NOTE_G4 392
#define NOTE_GS4 415
#define NOTE_A4 440
#define NOTE_AS4 466
#define NOTE_B4 494
#define NOTE_C5 523
#define NOTE_CS5 554
#define NOTE_D5 587
#define NOTE_DS5 622
#define NOTE_E5 659
#define NOTE_F5 698
#define NOTE_FS5 740
#define NOTE_G5 784
#define NOTE_GS5 831
#define NOTE_A5 880
#define NOTE_AS5 932
#define NOTE_B5 988
#define NOTE_C6 1047
#define NOTE_CS6 1109
#define NOTE_D6 1175
#define NOTE_DS6 1245
#define NOTE_E6 1319
#define NOTE_F6 1397
#define NOTE_FS6 1480
#define NOTE_G6 1568
#define NOTE_GS6 1661
#define NOTE_A6 1760
#define NOTE_AS6 1865
#define NOTE_B6 1976
#define NOTE_C7 2093
#define NOTE_CS7 2217
#define NOTE_D7 2349
#define NOTE_DS7 2489
#define NOTE_E7 2637
#define NOTE_F7 2794
#define NOTE_FS7 2960
#define NOTE_G7 3136
#define NOTE_GS7 3322
#define NOTE_A7 3520
#define NOTE_AS7 3729
#define NOTE_B7 3951
#define NOTE_C8 4186
#define NOTE_CS8 4435
#define NOTE_D8 4699
#define NOTE_DS8 4978
#include <MozziGuts.h>
#include <Oscil.h>
#include <tables/sin1024_int8.h>
Oscil <SIN1024_NUM_CELLS, AUDIO_RATE> aSin(SIN1024_DATA);
// コントロールレートの設定
//多いと音質がよくなるけど、処理時間がかかる
//音が歪むようであれば減らす
#define CONTROL_RATE 64
//インプットの状態を覚える変数
int input0;
int input1;
//音量
int gain_aSin;
//音階
int pitch_aSin;
//ドレミの定義ファイル
//#include "pitches.h"
//スケール
int scale[] = {
// //do re mi fa so ra ti
NOTE_C3, NOTE_D3, NOTE_E3, NOTE_F3, NOTE_G3, NOTE_A3, NOTE_B3,
NOTE_C4, NOTE_D4, NOTE_E4, NOTE_F4, NOTE_G4, NOTE_A4, NOTE_B4,
NOTE_C5, NOTE_D5, NOTE_E5, NOTE_F5, NOTE_G5, NOTE_A5, NOTE_B5,
NOTE_C6, NOTE_D6, NOTE_E6, NOTE_F6, NOTE_G6, NOTE_A6, NOTE_B6,
NOTE_C7, NOTE_D7, NOTE_E7, NOTE_F7, NOTE_G7, NOTE_A7, NOTE_B7,
};
//音階の個数を自動的に取得しておく変数
int dataNum = (sizeof(scale)/sizeof(int))-1;
#include <Wire.h>
#define MPU6050_AUX_VDDIO 0x01 // R/W
#define MPU6050_SMPLRT_DIV 0x19 // R/W
#define MPU6050_CONFIG 0x1A // R/W
#define MPU6050_GYRO_CONFIG 0x1B // R/W
#define MPU6050_ACCEL_CONFIG 0x1C // R/W
#define MPU6050_FF_THR 0x1D // R/W
#define MPU6050_FF_DUR 0x1E // R/W
#define MPU6050_MOT_THR 0x1F // R/W
#define MPU6050_MOT_DUR 0x20 // R/W
#define MPU6050_ZRMOT_THR 0x21 // R/W
#define MPU6050_ZRMOT_DUR 0x22 // R/W
#define MPU6050_FIFO_EN 0x23 // R/W
#define MPU6050_I2C_MST_CTRL 0x24 // R/W
#define MPU6050_I2C_SLV0_ADDR 0x25 // R/W
#define MPU6050_I2C_SLV0_REG 0x26 // R/W
#define MPU6050_I2C_SLV0_CTRL 0x27 // R/W
#define MPU6050_I2C_SLV1_ADDR 0x28 // R/W
#define MPU6050_I2C_SLV1_REG 0x29 // R/W
#define MPU6050_I2C_SLV1_CTRL 0x2A // R/W
#define MPU6050_I2C_SLV2_ADDR 0x2B // R/W
#define MPU6050_I2C_SLV2_REG 0x2C // R/W
#define MPU6050_I2C_SLV2_CTRL 0x2D // R/W
#define MPU6050_I2C_SLV3_ADDR 0x2E // R/W
#define MPU6050_I2C_SLV3_REG 0x2F // R/W
#define MPU6050_I2C_SLV3_CTRL 0x30 // R/W
#define MPU6050_I2C_SLV4_ADDR 0x31 // R/W
#define MPU6050_I2C_SLV4_REG 0x32 // R/W
#define MPU6050_I2C_SLV4_DO 0x33 // R/W
#define MPU6050_I2C_SLV4_CTRL 0x34 // R/W
#define MPU6050_I2C_SLV4_DI 0x35 // R
#define MPU6050_I2C_MST_STATUS 0x36 // R
#define MPU6050_INT_PIN_CFG 0x37 // R/W
#define MPU6050_INT_ENABLE 0x38 // R/W
#define MPU6050_INT_STATUS 0x3A // R
#define MPU6050_ACCEL_XOUT_H 0x3B // R
#define MPU6050_ACCEL_XOUT_L 0x3C // R
#define MPU6050_ACCEL_YOUT_H 0x3D // R
#define MPU6050_ACCEL_YOUT_L 0x3E // R
#define MPU6050_ACCEL_ZOUT_H 0x3F // R
#define MPU6050_ACCEL_ZOUT_L 0x40 // R
#define MPU6050_TEMP_OUT_H 0x41 // R
#define MPU6050_TEMP_OUT_L 0x42 // R
#define MPU6050_GYRO_XOUT_H 0x43 // R
#define MPU6050_GYRO_XOUT_L 0x44 // R
#define MPU6050_GYRO_YOUT_H 0x45 // R
#define MPU6050_GYRO_YOUT_L 0x46 // R
#define MPU6050_GYRO_ZOUT_H 0x47 // R
#define MPU6050_GYRO_ZOUT_L 0x48 // R
#define MPU6050_EXT_SENS_DATA_00 0x49 // R
#define MPU6050_EXT_SENS_DATA_01 0x4A // R
#define MPU6050_EXT_SENS_DATA_02 0x4B // R
#define MPU6050_EXT_SENS_DATA_03 0x4C // R
#define MPU6050_EXT_SENS_DATA_04 0x4D // R
#define MPU6050_EXT_SENS_DATA_05 0x4E // R
#define MPU6050_EXT_SENS_DATA_06 0x4F // R
#define MPU6050_EXT_SENS_DATA_07 0x50 // R
#define MPU6050_EXT_SENS_DATA_08 0x51 // R
#define MPU6050_EXT_SENS_DATA_09 0x52 // R
#define MPU6050_EXT_SENS_DATA_10 0x53 // R
#define MPU6050_EXT_SENS_DATA_11 0x54 // R
#define MPU6050_EXT_SENS_DATA_12 0x55 // R
#define MPU6050_EXT_SENS_DATA_13 0x56 // R
#define MPU6050_EXT_SENS_DATA_14 0x57 // R
#define MPU6050_EXT_SENS_DATA_15 0x58 // R
#define MPU6050_EXT_SENS_DATA_16 0x59 // R
#define MPU6050_EXT_SENS_DATA_17 0x5A // R
#define MPU6050_EXT_SENS_DATA_18 0x5B // R
#define MPU6050_EXT_SENS_DATA_19 0x5C // R
#define MPU6050_EXT_SENS_DATA_20 0x5D // R
#define MPU6050_EXT_SENS_DATA_21 0x5E // R
#define MPU6050_EXT_SENS_DATA_22 0x5F // R
#define MPU6050_EXT_SENS_DATA_23 0x60 // R
#define MPU6050_MOT_DETECT_STATUS 0x61 // R
#define MPU6050_I2C_SLV0_DO 0x63 // R/W
#define MPU6050_I2C_SLV1_DO 0x64 // R/W
#define MPU6050_I2C_SLV2_DO 0x65 // R/W
#define MPU6050_I2C_SLV3_DO 0x66 // R/W
#define MPU6050_I2C_MST_DELAY_CTRL 0x67 // R/W
#define MPU6050_SIGNAL_PATH_RESET 0x68 // R/W
#define MPU6050_MOT_DETECT_CTRL 0x69 // R/W
#define MPU6050_USER_CTRL 0x6A // R/W
#define MPU6050_PWR_MGMT_1 0x6B // R/W
#define MPU6050_PWR_MGMT_2 0x6C // R/W
#define MPU6050_FIFO_COUNTH 0x72 // R/W
#define MPU6050_FIFO_COUNTL 0x73 // R/W
#define MPU6050_FIFO_R_W 0x74 // R/W
#define MPU6050_WHO_AM_I 0x75 // R
// Defines for the bits, to be able to change
// between bit number and binary definition.
// By using the bit number, programming the sensor
// is like programming the AVR microcontroller.
// But instead of using "(1<<X)", or "_BV(X)",
// the Arduino "bit(X)" is used.
#define MPU6050_D0 0
#define MPU6050_D1 1
#define MPU6050_D2 2
#define MPU6050_D3 3
#define MPU6050_D4 4
#define MPU6050_D5 5
#define MPU6050_D6 6
#define MPU6050_D7 7
// AUX_VDDIO Register
#define MPU6050_AUX_VDDIO MPU6050_D7 // I2C high: 1=VDD, 0=VLOGIC
// CONFIG Register
// DLPF is Digital Low Pass Filter for both gyro and accelerometers.
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_DLPF_CFG0 MPU6050_D0
#define MPU6050_DLPF_CFG1 MPU6050_D1
#define MPU6050_DLPF_CFG2 MPU6050_D2
#define MPU6050_EXT_SYNC_SET0 MPU6050_D3
#define MPU6050_EXT_SYNC_SET1 MPU6050_D4
#define MPU6050_EXT_SYNC_SET2 MPU6050_D5
// Combined definitions for the EXT_SYNC_SET values
#define MPU6050_EXT_SYNC_SET_0 (0)
#define MPU6050_EXT_SYNC_SET_1 (bit(MPU6050_EXT_SYNC_SET0))
#define MPU6050_EXT_SYNC_SET_2 (bit(MPU6050_EXT_SYNC_SET1))
#define MPU6050_EXT_SYNC_SET_3 (bit(MPU6050_EXT_SYNC_SET1)|bit(MPU6050_EXT_SYNC_SET0))
#define MPU6050_EXT_SYNC_SET_4 (bit(MPU6050_EXT_SYNC_SET2))
#define MPU6050_EXT_SYNC_SET_5 (bit(MPU6050_EXT_SYNC_SET2)|bit(MPU6050_EXT_SYNC_SET0))
#define MPU6050_EXT_SYNC_SET_6 (bit(MPU6050_EXT_SYNC_SET2)|bit(MPU6050_EXT_SYNC_SET1))
#define MPU6050_EXT_SYNC_SET_7 (bit(MPU6050_EXT_SYNC_SET2)|bit(MPU6050_EXT_SYNC_SET1)|bit(MPU6050_EXT_SYNC_SET0))
// Alternative names for the combined definitions.
#define MPU6050_EXT_SYNC_DISABLED MPU6050_EXT_SYNC_SET_0
#define MPU6050_EXT_SYNC_TEMP_OUT_L MPU6050_EXT_SYNC_SET_1
#define MPU6050_EXT_SYNC_GYRO_XOUT_L MPU6050_EXT_SYNC_SET_2
#define MPU6050_EXT_SYNC_GYRO_YOUT_L MPU6050_EXT_SYNC_SET_3
#define MPU6050_EXT_SYNC_GYRO_ZOUT_L MPU6050_EXT_SYNC_SET_4
#define MPU6050_EXT_SYNC_ACCEL_XOUT_L MPU6050_EXT_SYNC_SET_5
#define MPU6050_EXT_SYNC_ACCEL_YOUT_L MPU6050_EXT_SYNC_SET_6
#define MPU6050_EXT_SYNC_ACCEL_ZOUT_L MPU6050_EXT_SYNC_SET_7
// Combined definitions for the DLPF_CFG values
#define MPU6050_DLPF_CFG_0 (0)
#define MPU6050_DLPF_CFG_1 (bit(MPU6050_DLPF_CFG0))
#define MPU6050_DLPF_CFG_2 (bit(MPU6050_DLPF_CFG1))
#define MPU6050_DLPF_CFG_3 (bit(MPU6050_DLPF_CFG1)|bit(MPU6050_DLPF_CFG0))
#define MPU6050_DLPF_CFG_4 (bit(MPU6050_DLPF_CFG2))
#define MPU6050_DLPF_CFG_5 (bit(MPU6050_DLPF_CFG2)|bit(MPU6050_DLPF_CFG0))
#define MPU6050_DLPF_CFG_6 (bit(MPU6050_DLPF_CFG2)|bit(MPU6050_DLPF_CFG1))
#define MPU6050_DLPF_CFG_7 (bit(MPU6050_DLPF_CFG2)|bit(MPU6050_DLPF_CFG1)|bit(MPU6050_DLPF_CFG0))
// Alternative names for the combined definitions
// This name uses the bandwidth (Hz) for the accelometer,
// for the gyro the bandwidth is almost the same.
#define MPU6050_DLPF_260HZ MPU6050_DLPF_CFG_0
#define MPU6050_DLPF_184HZ MPU6050_DLPF_CFG_1
#define MPU6050_DLPF_94HZ MPU6050_DLPF_CFG_2
#define MPU6050_DLPF_44HZ MPU6050_DLPF_CFG_3
#define MPU6050_DLPF_21HZ MPU6050_DLPF_CFG_4
#define MPU6050_DLPF_10HZ MPU6050_DLPF_CFG_5
#define MPU6050_DLPF_5HZ MPU6050_DLPF_CFG_6
#define MPU6050_DLPF_RESERVED MPU6050_DLPF_CFG_7
// GYRO_CONFIG Register
// The XG_ST, YG_ST, ZG_ST are bits for selftest.
// The FS_SEL sets the range for the gyro.
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_FS_SEL0 MPU6050_D3
#define MPU6050_FS_SEL1 MPU6050_D4
#define MPU6050_ZG_ST MPU6050_D5
#define MPU6050_YG_ST MPU6050_D6
#define MPU6050_XG_ST MPU6050_D7
// Combined definitions for the FS_SEL values
#define MPU6050_FS_SEL_0 (0)
#define MPU6050_FS_SEL_1 (bit(MPU6050_FS_SEL0))
#define MPU6050_FS_SEL_2 (bit(MPU6050_FS_SEL1))
#define MPU6050_FS_SEL_3 (bit(MPU6050_FS_SEL1)|bit(MPU6050_FS_SEL0))
// Alternative names for the combined definitions
// The name uses the range in degrees per second.
#define MPU6050_FS_SEL_250 MPU6050_FS_SEL_0
#define MPU6050_FS_SEL_500 MPU6050_FS_SEL_1
#define MPU6050_FS_SEL_1000 MPU6050_FS_SEL_2
#define MPU6050_FS_SEL_2000 MPU6050_FS_SEL_3
#define MPU6050_ACCEL_HPF0 MPU6050_D0
#define MPU6050_ACCEL_HPF1 MPU6050_D1
#define MPU6050_ACCEL_HPF2 MPU6050_D2
#define MPU6050_AFS_SEL0 MPU6050_D3
#define MPU6050_AFS_SEL1 MPU6050_D4
#define MPU6050_ZA_ST MPU6050_D5
#define MPU6050_YA_ST MPU6050_D6
#define MPU6050_XA_ST MPU6050_D7
// Combined definitions for the ACCEL_HPF values
#define MPU6050_ACCEL_HPF_0 (0)
#define MPU6050_ACCEL_HPF_1 (bit(MPU6050_ACCEL_HPF0))
#define MPU6050_ACCEL_HPF_2 (bit(MPU6050_ACCEL_HPF1))
#define MPU6050_ACCEL_HPF_3 (bit(MPU6050_ACCEL_HPF1)|bit(MPU6050_ACCEL_HPF0))
#define MPU6050_ACCEL_HPF_4 (bit(MPU6050_ACCEL_HPF2))
#define MPU6050_ACCEL_HPF_7 (bit(MPU6050_ACCEL_HPF2)|bit(MPU6050_ACCEL_HPF1)|bit(MPU6050_ACCEL_HPF0))
// Alternative names for the combined definitions
// The name uses the Cut-off frequency.
#define MPU6050_ACCEL_HPF_RESET MPU6050_ACCEL_HPF_0
#define MPU6050_ACCEL_HPF_5HZ MPU6050_ACCEL_HPF_1
#define MPU6050_ACCEL_HPF_2_5HZ MPU6050_ACCEL_HPF_2
#define MPU6050_ACCEL_HPF_1_25HZ MPU6050_ACCEL_HPF_3
#define MPU6050_ACCEL_HPF_0_63HZ MPU6050_ACCEL_HPF_4
#define MPU6050_ACCEL_HPF_HOLD MPU6050_ACCEL_HPF_7
// Combined definitions for the AFS_SEL values
#define MPU6050_AFS_SEL_0 (0)
#define MPU6050_AFS_SEL_1 (bit(MPU6050_AFS_SEL0))
#define MPU6050_AFS_SEL_2 (bit(MPU6050_AFS_SEL1))
#define MPU6050_AFS_SEL_3 (bit(MPU6050_AFS_SEL1)|bit(MPU6050_AFS_SEL0))
// Alternative names for the combined definitions
// The name uses the full scale range for the accelerometer.
#define MPU6050_AFS_SEL_2G MPU6050_AFS_SEL_0
#define MPU6050_AFS_SEL_4G MPU6050_AFS_SEL_1
#define MPU6050_AFS_SEL_8G MPU6050_AFS_SEL_2
#define MPU6050_AFS_SEL_16G MPU6050_AFS_SEL_3
// FIFO_EN Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_SLV0_FIFO_EN MPU6050_D0
#define MPU6050_SLV1_FIFO_EN MPU6050_D1
#define MPU6050_SLV2_FIFO_EN MPU6050_D2
#define MPU6050_ACCEL_FIFO_EN MPU6050_D3
#define MPU6050_ZG_FIFO_EN MPU6050_D4
#define MPU6050_YG_FIFO_EN MPU6050_D5
#define MPU6050_XG_FIFO_EN MPU6050_D6
#define MPU6050_TEMP_FIFO_EN MPU6050_D7
// I2C_MST_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_MST_CLK0 MPU6050_D0
#define MPU6050_I2C_MST_CLK1 MPU6050_D1
#define MPU6050_I2C_MST_CLK2 MPU6050_D2
#define MPU6050_I2C_MST_CLK3 MPU6050_D3
#define MPU6050_I2C_MST_P_NSR MPU6050_D4
#define MPU6050_SLV_3_FIFO_EN MPU6050_D5
#define MPU6050_WAIT_FOR_ES MPU6050_D6
#define MPU6050_MULT_MST_EN MPU6050_D7
// Combined definitions for the I2C_MST_CLK
#define MPU6050_I2C_MST_CLK_0 (0)
#define MPU6050_I2C_MST_CLK_1 (bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_2 (bit(MPU6050_I2C_MST_CLK1))
#define MPU6050_I2C_MST_CLK_3 (bit(MPU6050_I2C_MST_CLK1)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_4 (bit(MPU6050_I2C_MST_CLK2))
#define MPU6050_I2C_MST_CLK_5 (bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_6 (bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK1))
#define MPU6050_I2C_MST_CLK_7 (bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK1)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_8 (bit(MPU6050_I2C_MST_CLK3))
#define MPU6050_I2C_MST_CLK_9 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_10 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK1))
#define MPU6050_I2C_MST_CLK_11 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK1)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_12 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK2))
#define MPU6050_I2C_MST_CLK_13 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK0))
#define MPU6050_I2C_MST_CLK_14 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK1))
#define MPU6050_I2C_MST_CLK_15 (bit(MPU6050_I2C_MST_CLK3)|bit(MPU6050_I2C_MST_CLK2)|bit(MPU6050_I2C_MST_CLK1)|bit(MPU6050_I2C_MST_CLK0))
// Alternative names for the combined definitions
// The names uses I2C Master Clock Speed in kHz.
#define MPU6050_I2C_MST_CLK_348KHZ MPU6050_I2C_MST_CLK_0
#define MPU6050_I2C_MST_CLK_333KHZ MPU6050_I2C_MST_CLK_1
#define MPU6050_I2C_MST_CLK_320KHZ MPU6050_I2C_MST_CLK_2
#define MPU6050_I2C_MST_CLK_308KHZ MPU6050_I2C_MST_CLK_3
#define MPU6050_I2C_MST_CLK_296KHZ MPU6050_I2C_MST_CLK_4
#define MPU6050_I2C_MST_CLK_286KHZ MPU6050_I2C_MST_CLK_5
#define MPU6050_I2C_MST_CLK_276KHZ MPU6050_I2C_MST_CLK_6
#define MPU6050_I2C_MST_CLK_267KHZ MPU6050_I2C_MST_CLK_7
#define MPU6050_I2C_MST_CLK_258KHZ MPU6050_I2C_MST_CLK_8
#define MPU6050_I2C_MST_CLK_500KHZ MPU6050_I2C_MST_CLK_9
#define MPU6050_I2C_MST_CLK_471KHZ MPU6050_I2C_MST_CLK_10
#define MPU6050_I2C_MST_CLK_444KHZ MPU6050_I2C_MST_CLK_11
#define MPU6050_I2C_MST_CLK_421KHZ MPU6050_I2C_MST_CLK_12
#define MPU6050_I2C_MST_CLK_400KHZ MPU6050_I2C_MST_CLK_13
#define MPU6050_I2C_MST_CLK_381KHZ MPU6050_I2C_MST_CLK_14
#define MPU6050_I2C_MST_CLK_364KHZ MPU6050_I2C_MST_CLK_15
// I2C_SLV0_ADDR Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV0_RW MPU6050_D7
// I2C_SLV0_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV0_LEN0 MPU6050_D0
#define MPU6050_I2C_SLV0_LEN1 MPU6050_D1
#define MPU6050_I2C_SLV0_LEN2 MPU6050_D2
#define MPU6050_I2C_SLV0_LEN3 MPU6050_D3
#define MPU6050_I2C_SLV0_GRP MPU6050_D4
#define MPU6050_I2C_SLV0_REG_DIS MPU6050_D5
#define MPU6050_I2C_SLV0_BYTE_SW MPU6050_D6
#define MPU6050_I2C_SLV0_EN MPU6050_D7
// A mask for the length
#define MPU6050_I2C_SLV0_LEN_MASK 0x0F
// I2C_SLV1_ADDR Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV1_RW MPU6050_D7
// I2C_SLV1_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV1_LEN0 MPU6050_D0
#define MPU6050_I2C_SLV1_LEN1 MPU6050_D1
#define MPU6050_I2C_SLV1_LEN2 MPU6050_D2
#define MPU6050_I2C_SLV1_LEN3 MPU6050_D3
#define MPU6050_I2C_SLV1_GRP MPU6050_D4
#define MPU6050_I2C_SLV1_REG_DIS MPU6050_D5
#define MPU6050_I2C_SLV1_BYTE_SW MPU6050_D6
#define MPU6050_I2C_SLV1_EN MPU6050_D7
// A mask for the length
#define MPU6050_I2C_SLV1_LEN_MASK 0x0F
// I2C_SLV2_ADDR Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV2_RW MPU6050_D7
// I2C_SLV2_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV2_LEN0 MPU6050_D0
#define MPU6050_I2C_SLV2_LEN1 MPU6050_D1
#define MPU6050_I2C_SLV2_LEN2 MPU6050_D2
#define MPU6050_I2C_SLV2_LEN3 MPU6050_D3
#define MPU6050_I2C_SLV2_GRP MPU6050_D4
#define MPU6050_I2C_SLV2_REG_DIS MPU6050_D5
#define MPU6050_I2C_SLV2_BYTE_SW MPU6050_D6
#define MPU6050_I2C_SLV2_EN MPU6050_D7
// A mask for the length
#define MPU6050_I2C_SLV2_LEN_MASK 0x0F
// I2C_SLV3_ADDR Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV3_RW MPU6050_D7
// I2C_SLV3_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV3_LEN0 MPU6050_D0
#define MPU6050_I2C_SLV3_LEN1 MPU6050_D1
#define MPU6050_I2C_SLV3_LEN2 MPU6050_D2
#define MPU6050_I2C_SLV3_LEN3 MPU6050_D3
#define MPU6050_I2C_SLV3_GRP MPU6050_D4
#define MPU6050_I2C_SLV3_REG_DIS MPU6050_D5
#define MPU6050_I2C_SLV3_BYTE_SW MPU6050_D6
#define MPU6050_I2C_SLV3_EN MPU6050_D7
// A mask for the length
#define MPU6050_I2C_SLV3_LEN_MASK 0x0F
// I2C_SLV4_ADDR Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV4_RW MPU6050_D7
// I2C_SLV4_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_MST_DLY0 MPU6050_D0
#define MPU6050_I2C_MST_DLY1 MPU6050_D1
#define MPU6050_I2C_MST_DLY2 MPU6050_D2
#define MPU6050_I2C_MST_DLY3 MPU6050_D3
#define MPU6050_I2C_MST_DLY4 MPU6050_D4
#define MPU6050_I2C_SLV4_REG_DIS MPU6050_D5
#define MPU6050_I2C_SLV4_INT_EN MPU6050_D6
#define MPU6050_I2C_SLV4_EN MPU6050_D7
// A mask for the delay
#define MPU6050_I2C_MST_DLY_MASK 0x1F
// I2C_MST_STATUS Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV0_NACK MPU6050_D0
#define MPU6050_I2C_SLV1_NACK MPU6050_D1
#define MPU6050_I2C_SLV2_NACK MPU6050_D2
#define MPU6050_I2C_SLV3_NACK MPU6050_D3
#define MPU6050_I2C_SLV4_NACK MPU6050_D4
#define MPU6050_I2C_LOST_ARB MPU6050_D5
#define MPU6050_I2C_SLV4_DONE MPU6050_D6
#define MPU6050_PASS_THROUGH MPU6050_D7
// I2C_PIN_CFG Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_CLKOUT_EN MPU6050_D0
#define MPU6050_I2C_BYPASS_EN MPU6050_D1
#define MPU6050_FSYNC_INT_EN MPU6050_D2
#define MPU6050_FSYNC_INT_LEVEL MPU6050_D3
#define MPU6050_INT_RD_CLEAR MPU6050_D4
#define MPU6050_LATCH_INT_EN MPU6050_D5
#define MPU6050_INT_OPEN MPU6050_D6
#define MPU6050_INT_LEVEL MPU6050_D7
// INT_ENABLE Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_DATA_RDY_EN MPU6050_D0
#define MPU6050_I2C_MST_INT_EN MPU6050_D3
#define MPU6050_FIFO_OFLOW_EN MPU6050_D4
#define MPU6050_ZMOT_EN MPU6050_D5
#define MPU6050_MOT_EN MPU6050_D6
#define MPU6050_FF_EN MPU6050_D7
// INT_STATUS Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_DATA_RDY_INT MPU6050_D0
#define MPU6050_I2C_MST_INT MPU6050_D3
#define MPU6050_FIFO_OFLOW_INT MPU6050_D4
#define MPU6050_ZMOT_INT MPU6050_D5
#define MPU6050_MOT_INT MPU6050_D6
#define MPU6050_FF_INT MPU6050_D7
// MOT_DETECT_STATUS Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_MOT_ZRMOT MPU6050_D0
#define MPU6050_MOT_ZPOS MPU6050_D2
#define MPU6050_MOT_ZNEG MPU6050_D3
#define MPU6050_MOT_YPOS MPU6050_D4
#define MPU6050_MOT_YNEG MPU6050_D5
#define MPU6050_MOT_XPOS MPU6050_D6
#define MPU6050_MOT_XNEG MPU6050_D7
// IC2_MST_DELAY_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_I2C_SLV0_DLY_EN MPU6050_D0
#define MPU6050_I2C_SLV1_DLY_EN MPU6050_D1
#define MPU6050_I2C_SLV2_DLY_EN MPU6050_D2
#define MPU6050_I2C_SLV3_DLY_EN MPU6050_D3
#define MPU6050_I2C_SLV4_DLY_EN MPU6050_D4
#define MPU6050_DELAY_ES_SHADOW MPU6050_D7
// SIGNAL_PATH_RESET Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_TEMP_RESET MPU6050_D0
#define MPU6050_ACCEL_RESET MPU6050_D1
#define MPU6050_GYRO_RESET MPU6050_D2
// MOT_DETECT_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_MOT_COUNT0 MPU6050_D0
#define MPU6050_MOT_COUNT1 MPU6050_D1
#define MPU6050_FF_COUNT0 MPU6050_D2
#define MPU6050_FF_COUNT1 MPU6050_D3
#define MPU6050_ACCEL_ON_DELAY0 MPU6050_D4
#define MPU6050_ACCEL_ON_DELAY1 MPU6050_D5
// Combined definitions for the MOT_COUNT
#define MPU6050_MOT_COUNT_0 (0)
#define MPU6050_MOT_COUNT_1 (bit(MPU6050_MOT_COUNT0))
#define MPU6050_MOT_COUNT_2 (bit(MPU6050_MOT_COUNT1))
#define MPU6050_MOT_COUNT_3 (bit(MPU6050_MOT_COUNT1)|bit(MPU6050_MOT_COUNT0))
// Alternative names for the combined definitions
#define MPU6050_MOT_COUNT_RESET MPU6050_MOT_COUNT_0
// Combined definitions for the FF_COUNT
#define MPU6050_FF_COUNT_0 (0)
#define MPU6050_FF_COUNT_1 (bit(MPU6050_FF_COUNT0))
#define MPU6050_FF_COUNT_2 (bit(MPU6050_FF_COUNT1))
#define MPU6050_FF_COUNT_3 (bit(MPU6050_FF_COUNT1)|bit(MPU6050_FF_COUNT0))
// Alternative names for the combined definitions
#define MPU6050_FF_COUNT_RESET MPU6050_FF_COUNT_0
// Combined definitions for the ACCEL_ON_DELAY
#define MPU6050_ACCEL_ON_DELAY_0 (0)
#define MPU6050_ACCEL_ON_DELAY_1 (bit(MPU6050_ACCEL_ON_DELAY0))
#define MPU6050_ACCEL_ON_DELAY_2 (bit(MPU6050_ACCEL_ON_DELAY1))
#define MPU6050_ACCEL_ON_DELAY_3 (bit(MPU6050_ACCEL_ON_DELAY1)|bit(MPU6050_ACCEL_ON_DELAY0))
// Alternative names for the ACCEL_ON_DELAY
#define MPU6050_ACCEL_ON_DELAY_0MS MPU6050_ACCEL_ON_DELAY_0
#define MPU6050_ACCEL_ON_DELAY_1MS MPU6050_ACCEL_ON_DELAY_1
#define MPU6050_ACCEL_ON_DELAY_2MS MPU6050_ACCEL_ON_DELAY_2
#define MPU6050_ACCEL_ON_DELAY_3MS MPU6050_ACCEL_ON_DELAY_3
// USER_CTRL Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_SIG_COND_RESET MPU6050_D0
#define MPU6050_I2C_MST_RESET MPU6050_D1
#define MPU6050_FIFO_RESET MPU6050_D2
#define MPU6050_I2C_IF_DIS MPU6050_D4 // must be 0 for MPU-6050
#define MPU6050_I2C_MST_EN MPU6050_D5
#define MPU6050_FIFO_EN MPU6050_D6
// PWR_MGMT_1 Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_CLKSEL0 MPU6050_D0
#define MPU6050_CLKSEL1 MPU6050_D1
#define MPU6050_CLKSEL2 MPU6050_D2
#define MPU6050_TEMP_DIS MPU6050_D3 // 1: disable temperature sensor
#define MPU6050_CYCLE MPU6050_D5 // 1: sample and sleep
#define MPU6050_SLEEP MPU6050_D6 // 1: sleep mode
#define MPU6050_DEVICE_RESET MPU6050_D7 // 1: reset to default values
// Combined definitions for the CLKSEL
#define MPU6050_CLKSEL_0 (0)
#define MPU6050_CLKSEL_1 (bit(MPU6050_CLKSEL0))
#define MPU6050_CLKSEL_2 (bit(MPU6050_CLKSEL1))
#define MPU6050_CLKSEL_3 (bit(MPU6050_CLKSEL1)|bit(MPU6050_CLKSEL0))
#define MPU6050_CLKSEL_4 (bit(MPU6050_CLKSEL2))
#define MPU6050_CLKSEL_5 (bit(MPU6050_CLKSEL2)|bit(MPU6050_CLKSEL0))
#define MPU6050_CLKSEL_6 (bit(MPU6050_CLKSEL2)|bit(MPU6050_CLKSEL1))
#define MPU6050_CLKSEL_7 (bit(MPU6050_CLKSEL2)|bit(MPU6050_CLKSEL1)|bit(MPU6050_CLKSEL0))
// Alternative names for the combined definitions
#define MPU6050_CLKSEL_INTERNAL MPU6050_CLKSEL_0
#define MPU6050_CLKSEL_X MPU6050_CLKSEL_1
#define MPU6050_CLKSEL_Y MPU6050_CLKSEL_2
#define MPU6050_CLKSEL_Z MPU6050_CLKSEL_3
#define MPU6050_CLKSEL_EXT_32KHZ MPU6050_CLKSEL_4
#define MPU6050_CLKSEL_EXT_19_2MHZ MPU6050_CLKSEL_5
#define MPU6050_CLKSEL_RESERVED MPU6050_CLKSEL_6
#define MPU6050_CLKSEL_STOP MPU6050_CLKSEL_7
// PWR_MGMT_2 Register
// These are the names for the bits.
// Use these only with the bit() macro.
#define MPU6050_STBY_ZG MPU6050_D0
#define MPU6050_STBY_YG MPU6050_D1
#define MPU6050_STBY_XG MPU6050_D2
#define MPU6050_STBY_ZA MPU6050_D3
#define MPU6050_STBY_YA MPU6050_D4
#define MPU6050_STBY_XA MPU6050_D5
#define MPU6050_LP_WAKE_CTRL0 MPU6050_D6
#define MPU6050_LP_WAKE_CTRL1 MPU6050_D7
// Combined definitions for the LP_WAKE_CTRL
#define MPU6050_LP_WAKE_CTRL_0 (0)
#define MPU6050_LP_WAKE_CTRL_1 (bit(MPU6050_LP_WAKE_CTRL0))
#define MPU6050_LP_WAKE_CTRL_2 (bit(MPU6050_LP_WAKE_CTRL1))
#define MPU6050_LP_WAKE_CTRL_3 (bit(MPU6050_LP_WAKE_CTRL1)|bit(MPU6050_LP_WAKE_CTRL0))
// Alternative names for the combined definitions
// The names uses the Wake-up Frequency.
#define MPU6050_LP_WAKE_1_25HZ MPU6050_LP_WAKE_CTRL_0
#define MPU6050_LP_WAKE_2_5HZ MPU6050_LP_WAKE_CTRL_1
#define MPU6050_LP_WAKE_5HZ MPU6050_LP_WAKE_CTRL_2
#define MPU6050_LP_WAKE_10HZ MPU6050_LP_WAKE_CTRL_3
#define MPU6050_I2C_ADDRESS 0x68
typedef union accel_t_gyro_union
{
struct
{
uint8_t x_accel_h;
uint8_t x_accel_l;
uint8_t y_accel_h;
uint8_t y_accel_l;
uint8_t z_accel_h;
uint8_t z_accel_l;
uint8_t t_h;
uint8_t t_l;
uint8_t x_gyro_h;
uint8_t x_gyro_l;
uint8_t y_gyro_h;
uint8_t y_gyro_l;
uint8_t z_gyro_h;
uint8_t z_gyro_l;
} reg;
struct
{
int16_t x_accel;
int16_t y_accel;
int16_t z_accel;
int16_t temperature;
int16_t x_gyro;
int16_t y_gyro;
int16_t z_gyro;
} value;
};
#include <EventDelay.h>
void setup(){
startMozzi(CONTROL_RATE); //mozziのスタート
//アンプのMUTEを解除する(音が鳴る)
pinMode(13,OUTPUT);
digitalWrite(13,LOW);
Serial.begin(9600);
//スイッチ
pinMode(A1,INPUT);
input1 = analogRead(A1);
int error;
uint8_t c;
Wire.begin();
error = MPU6050_read (MPU6050_WHO_AM_I, &c, 1);
error = MPU6050_read (MPU6050_PWR_MGMT_1, &c, 1);
MPU6050_write_reg (MPU6050_PWR_MGMT_1, 0);
}
//mozziの中のloopみたいな部分
//この時点ではまだ音は鳴りません。
//「int updateAudio()」で音の波形を更新して「void loop()内のaudioHook();」で音を鳴らします。
void updateControl(){
int error;
double dT;
accel_t_gyro_union accel_t_gyro;
error = MPU6050_read (MPU6050_ACCEL_XOUT_H, (uint8_t *) &accel_t_gyro, sizeof(accel_t_gyro));
uint8_t swap;
#define SWAP(x,y) swap = x; x = y; y = swap
SWAP (accel_t_gyro.reg.x_accel_h, accel_t_gyro.reg.x_accel_l);
SWAP (accel_t_gyro.reg.y_accel_h, accel_t_gyro.reg.y_accel_l);
SWAP (accel_t_gyro.reg.z_accel_h, accel_t_gyro.reg.z_accel_l);
SWAP (accel_t_gyro.reg.t_h, accel_t_gyro.reg.t_l);
SWAP (accel_t_gyro.reg.x_gyro_h, accel_t_gyro.reg.x_gyro_l);
SWAP (accel_t_gyro.reg.y_gyro_h, accel_t_gyro.reg.y_gyro_l);
SWAP (accel_t_gyro.reg.z_gyro_h, accel_t_gyro.reg.z_gyro_l);
dT = ( (double) accel_t_gyro.value.temperature + 12412.0) / 340.0;
int a=abs(accel_t_gyro.value.x_accel);
int b=abs(accel_t_gyro.value.y_accel);
int c=abs(accel_t_gyro.value.z_accel);
int X=map(a+b+c,50,50000,800,0);
input1 = mozziAnalogRead(A1);
Serial.println(X);
Serial.println(input1);
//スイッチを押したら
if (input1 > 600){
//センサの値をマッピングする(整える)
int adjust0 = map(X,0,1023,0, dataNum);
pitch_aSin = constrain(adjust0, 0,dataNum);
Serial.println(adjust0);
// スケールから周波数の値を参照して、オシレータに代入
aSin.setFreq((scale[pitch_aSin]));
//ゲインを255に
gain_aSin = 255;
}
//ゲインを減衰させる
gain_aSin*=0.9;
EventDelay(10);
Serial.println();
}
//音を出力する
int updateAudio(){
//音の波形をアップデートする
return (aSin.next()*gain_aSin)>>8;
}
//loopはかならず書く
//音が歪むので、audioHook();以外は書かない
void loop(){
audioHook(); //オーディオ再生のために必要
}
int MPU6050_read(int start, uint8_t *buffer, int size)
{
int i, n, error;
Wire.beginTransmission(MPU6050_I2C_ADDRESS);
n = Wire.write(start);
if (n != 1)
return (-10);
n = Wire.endTransmission(false); // hold the I2C-bus
if (n != 0)
return (n);
// Third parameter is true: relase I2C-bus after data is read.
Wire.requestFrom(MPU6050_I2C_ADDRESS, size, true);
i = 0;
while(Wire.available() && i<size)
{
buffer[i++]=Wire.read();
}
if ( i != size)
return (-11);
return (0); // return : no error
}
int MPU6050_write(int start, const uint8_t *pData, int size)
{
int n, error;
Wire.beginTransmission(MPU6050_I2C_ADDRESS);
n = Wire.write(start); // write the start address
if (n != 1)
return (-20);
n = Wire.write(pData, size); // write data bytes
if (n != size)
return (-21);
error = Wire.endTransmission(true); // release the I2C-bus
if (error != 0)
return (error);
return (0); // return : no error
}
int MPU6050_write_reg(int reg, uint8_t data)
{
int error;
error = MPU6050_write(reg, &data, 1);
return (error);
}