下記キット(
http://fabble.cc/gakuhirota/ocpc )を使用して制作。
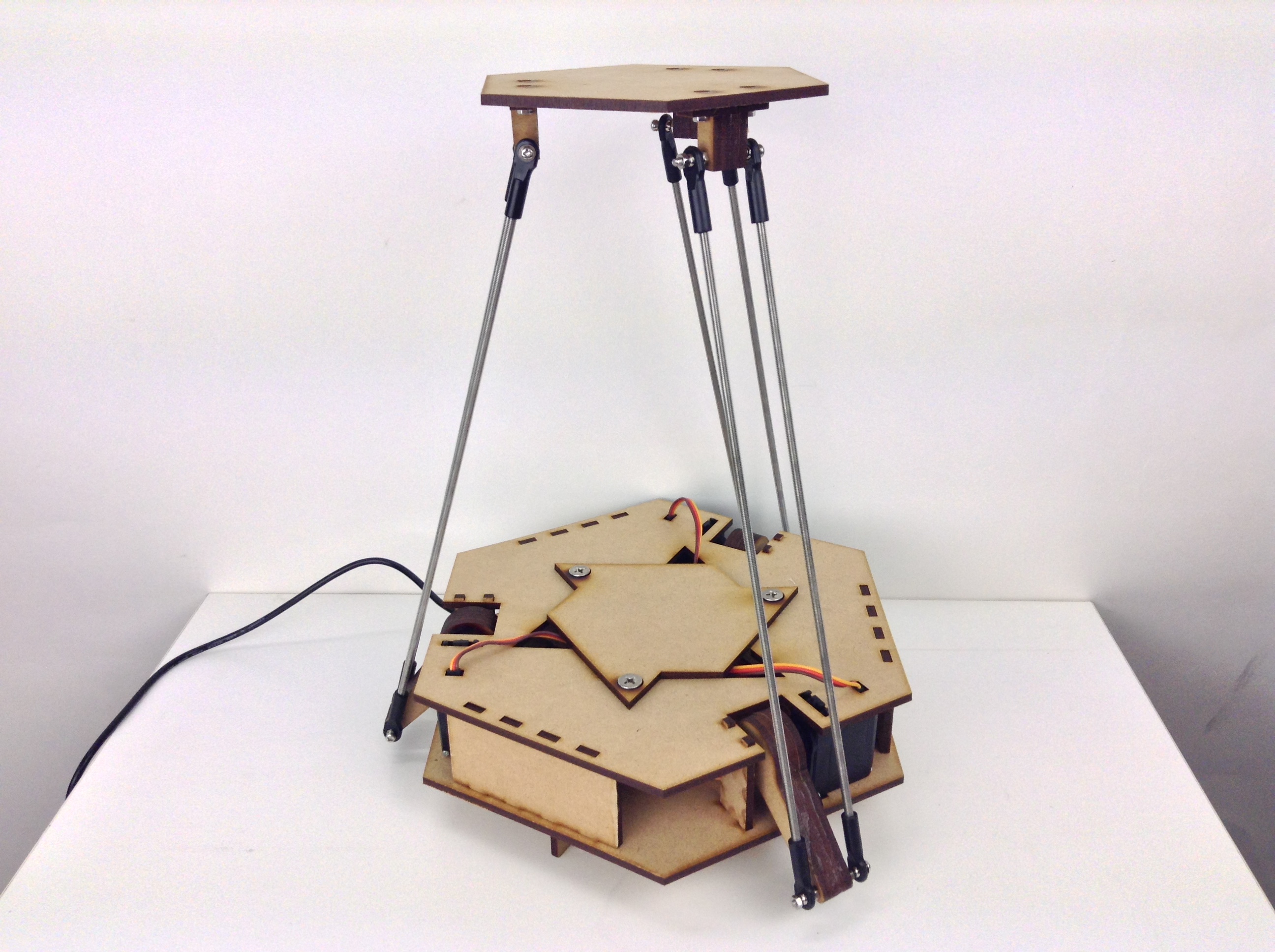
私たちが今回作ったTechマクマヤコンは、時間がなくてもメイクがしたい女子の強い味方となる、自動チーク装置です。ブラシを天板の外側に向けてつけることで顔との接触を可能にし、ハンズフリーでチークをつけることができます。円を描くだけの単純作業なのでこのOCPCでもそつなく仕事がこなせるというわけです。洗面所の壁や鏡にこれを設置すれば、口紅やマスカラを塗ってる間にチークが完了!これで寝坊した朝もバッチリきめて出かけることができます。
------------------------------------------------------------------------
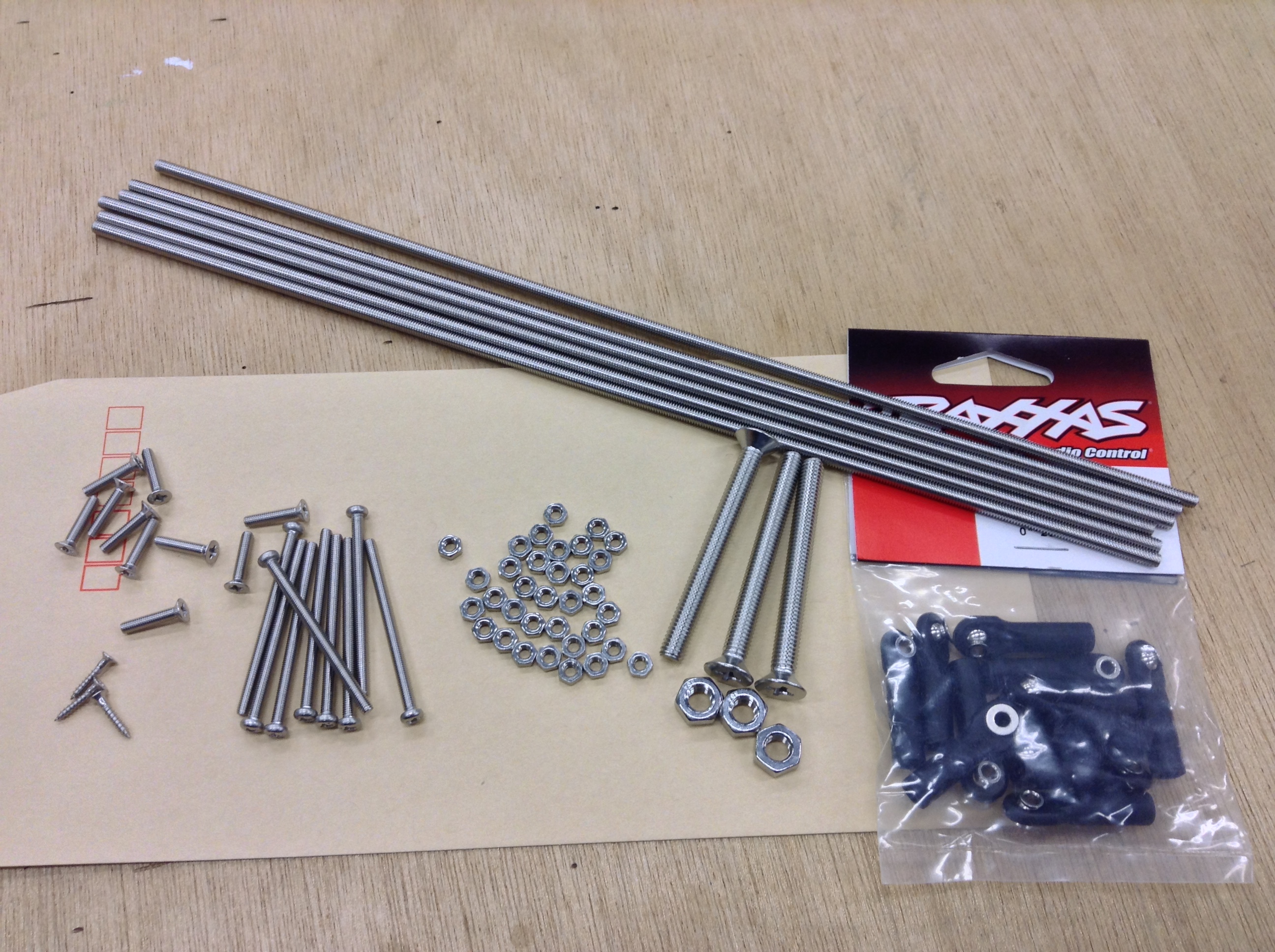
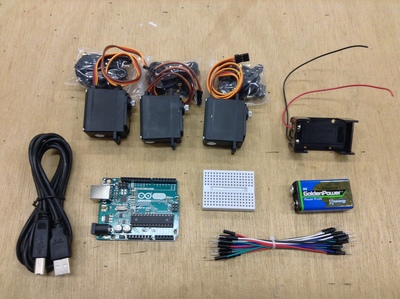
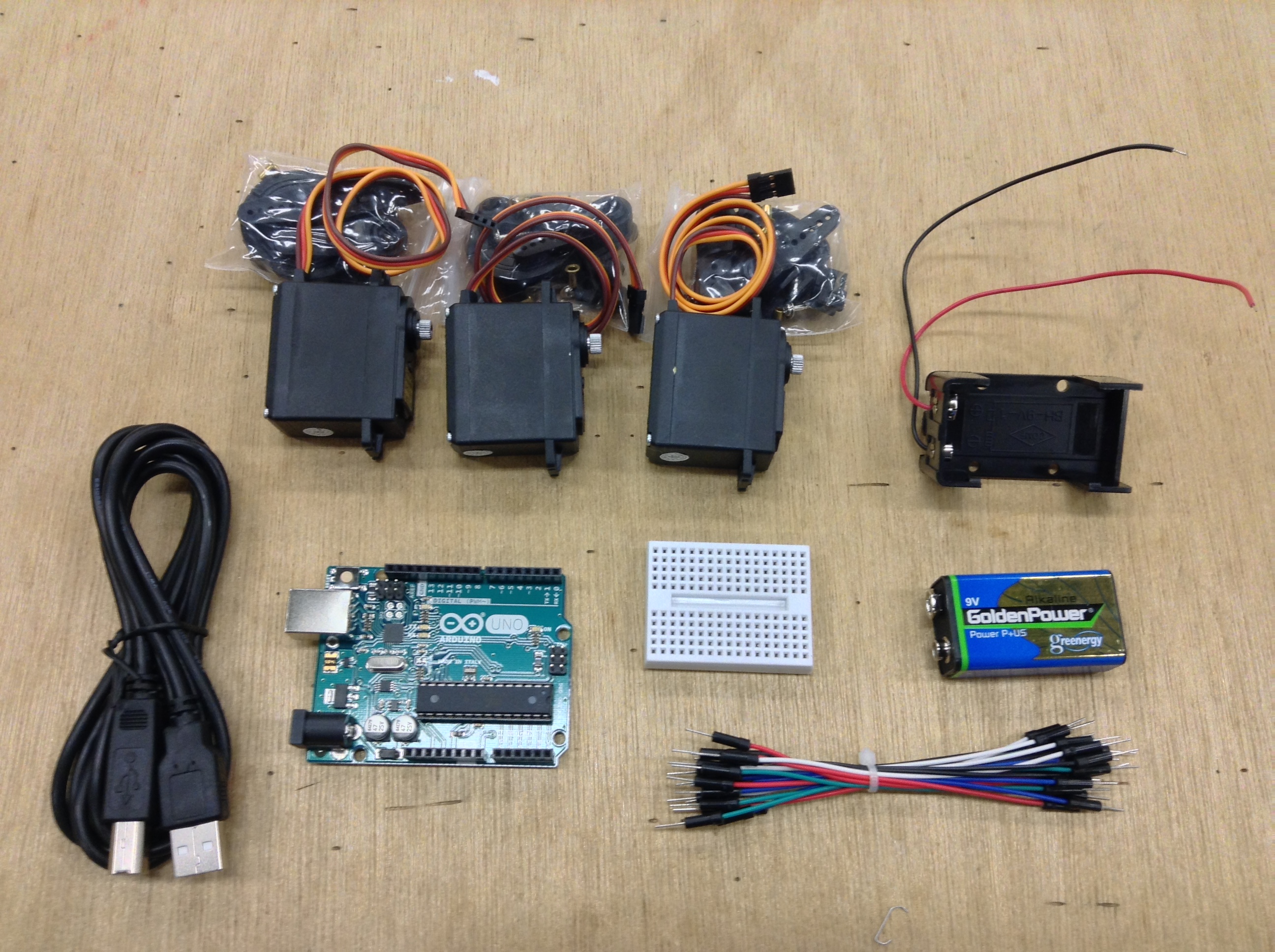
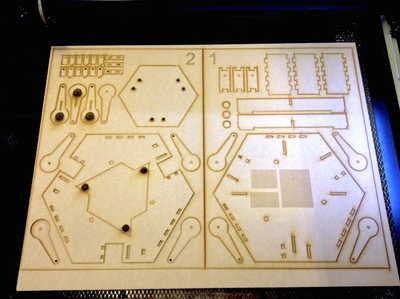
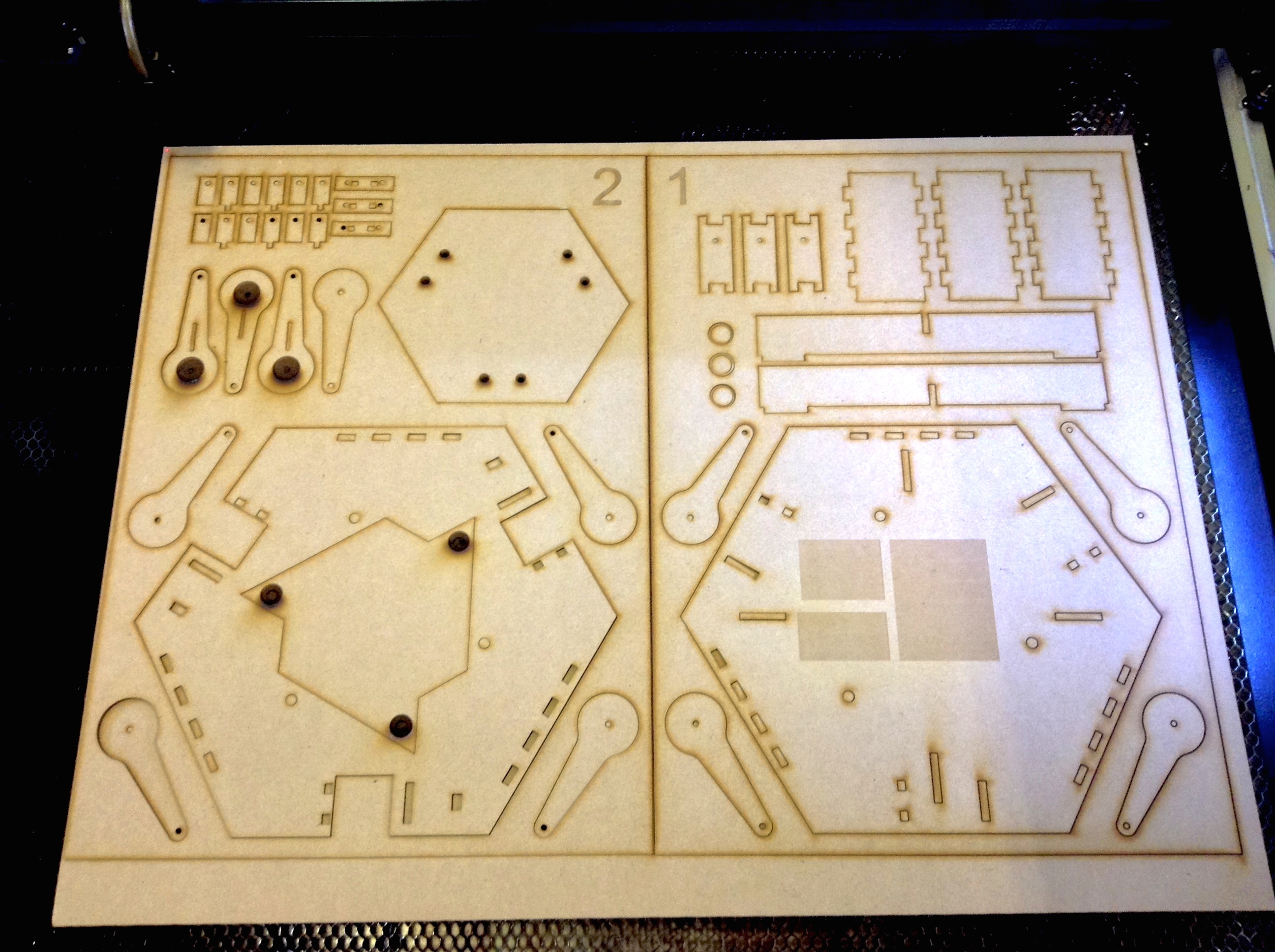
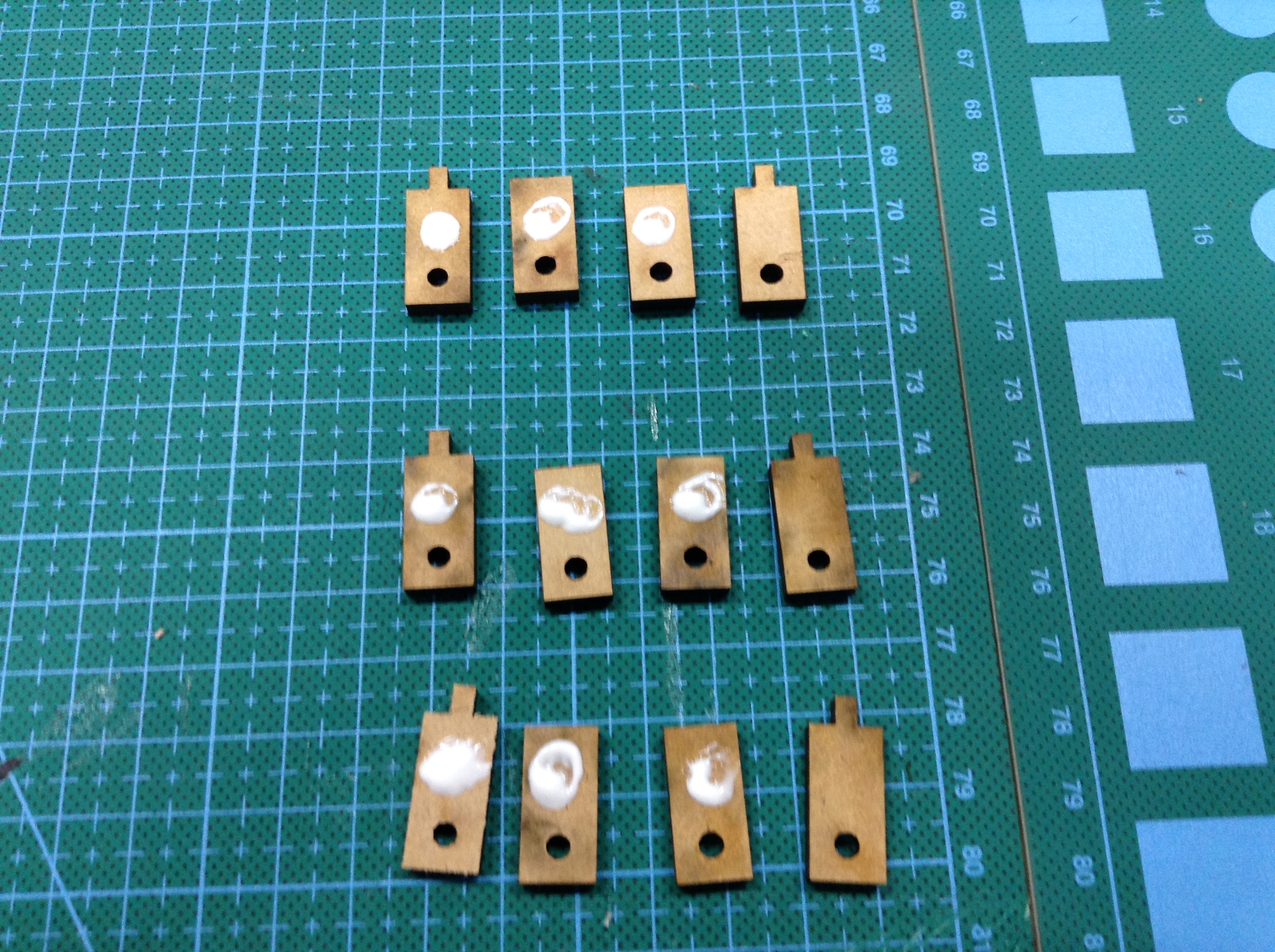
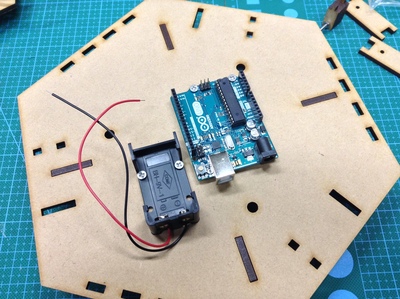
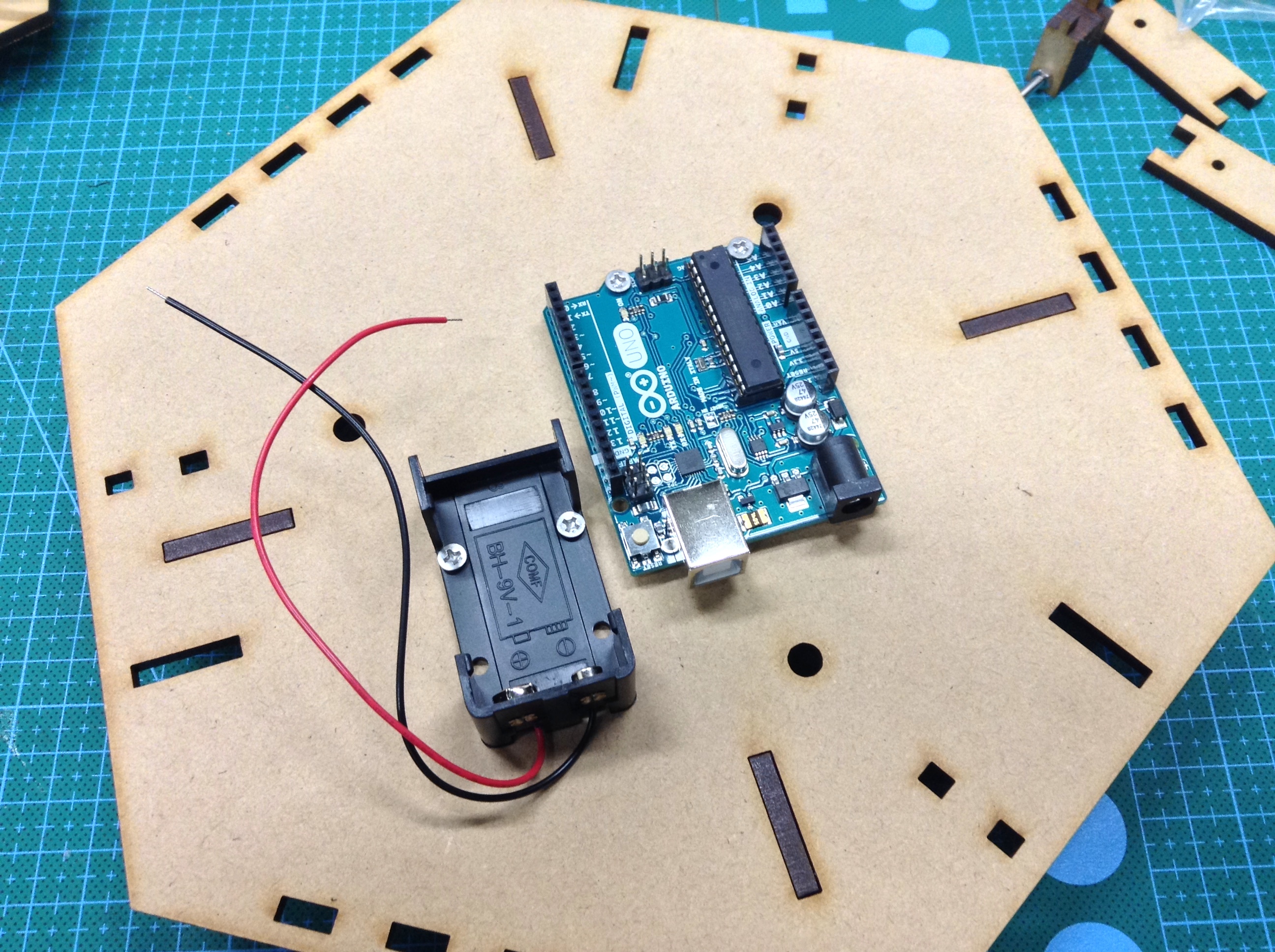
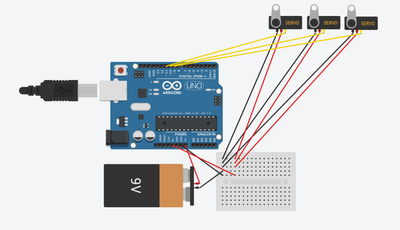
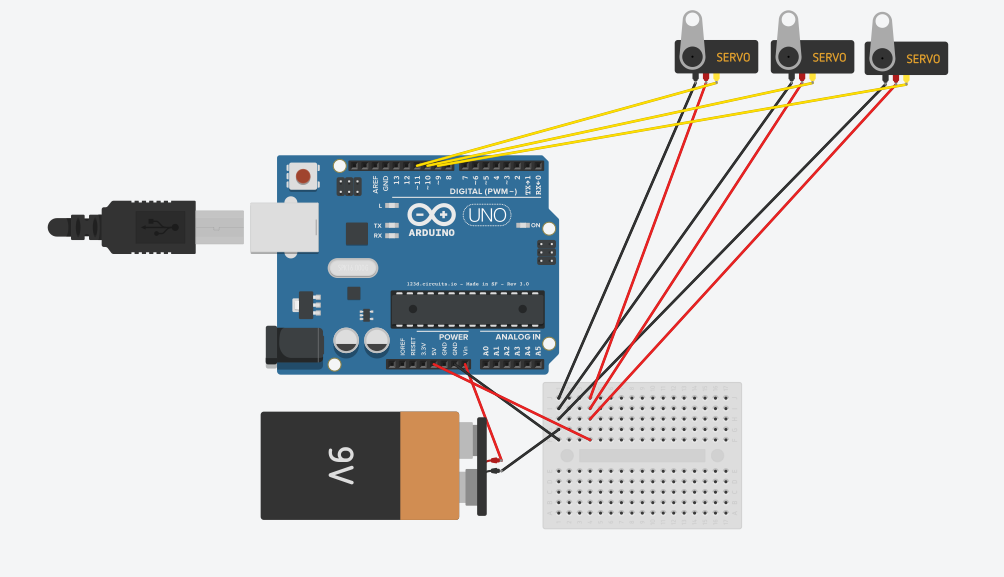
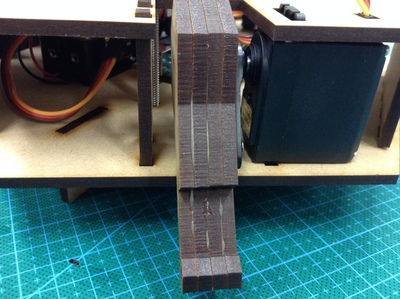
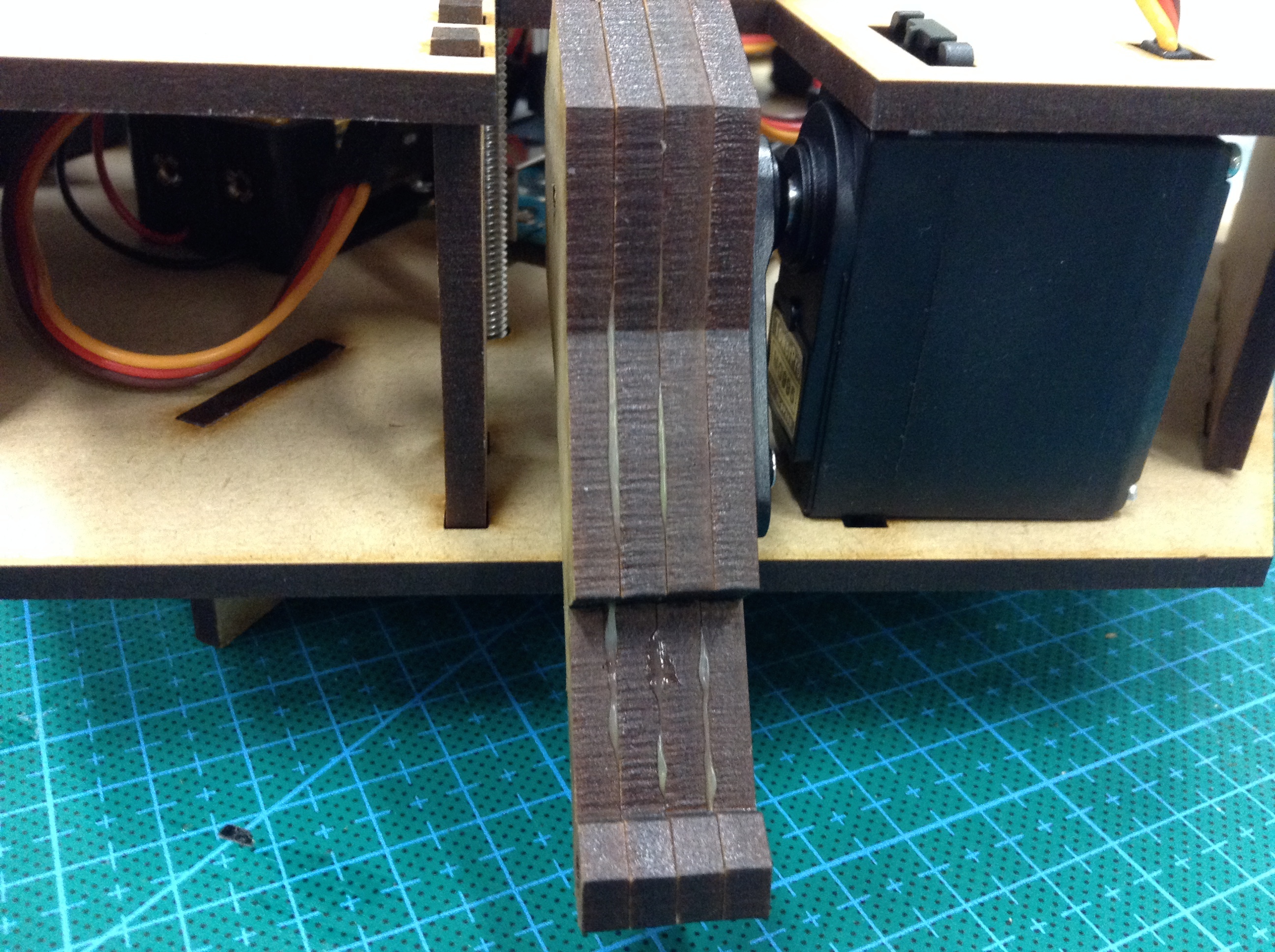
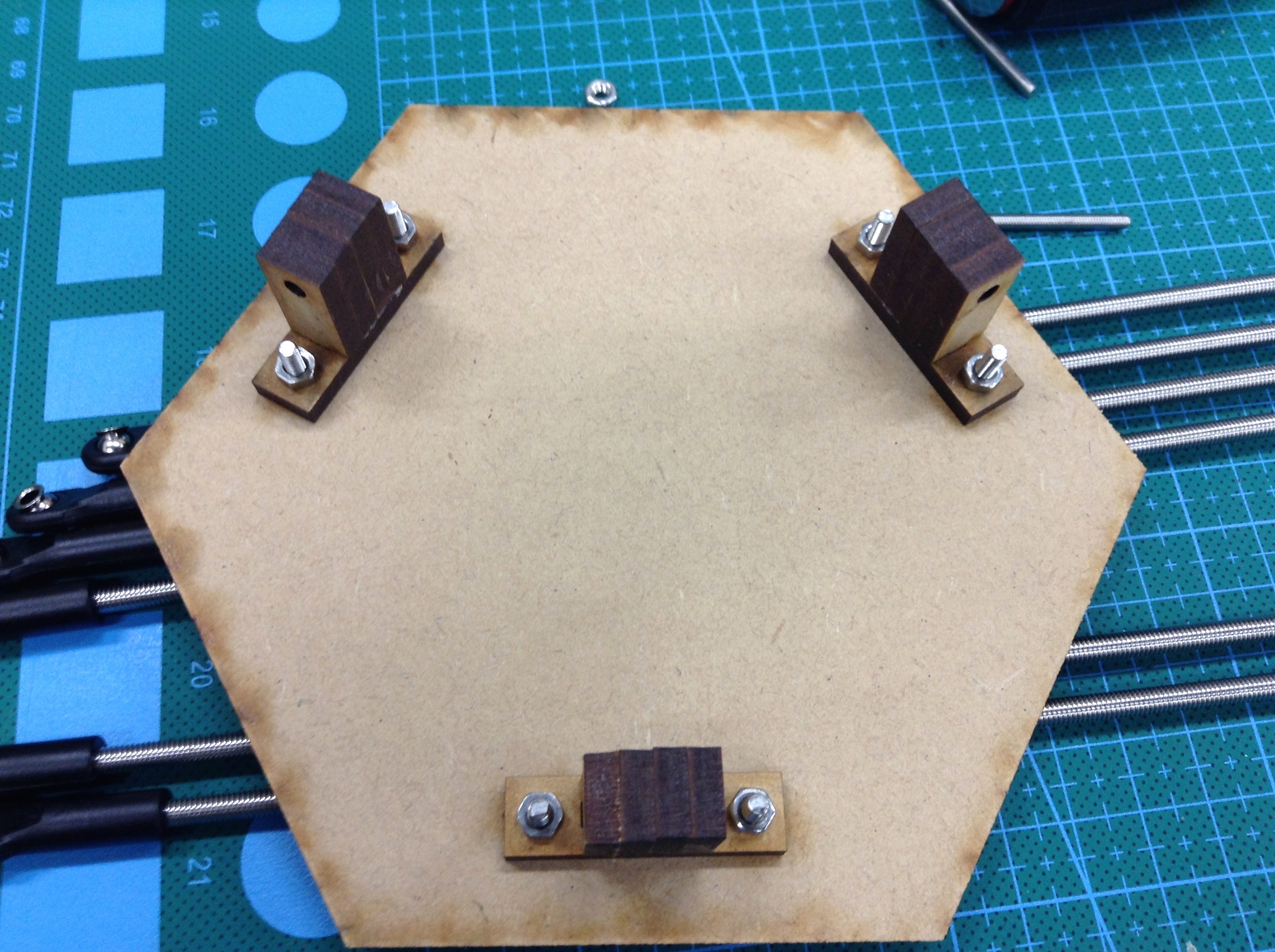
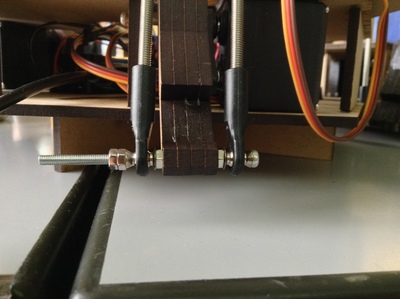
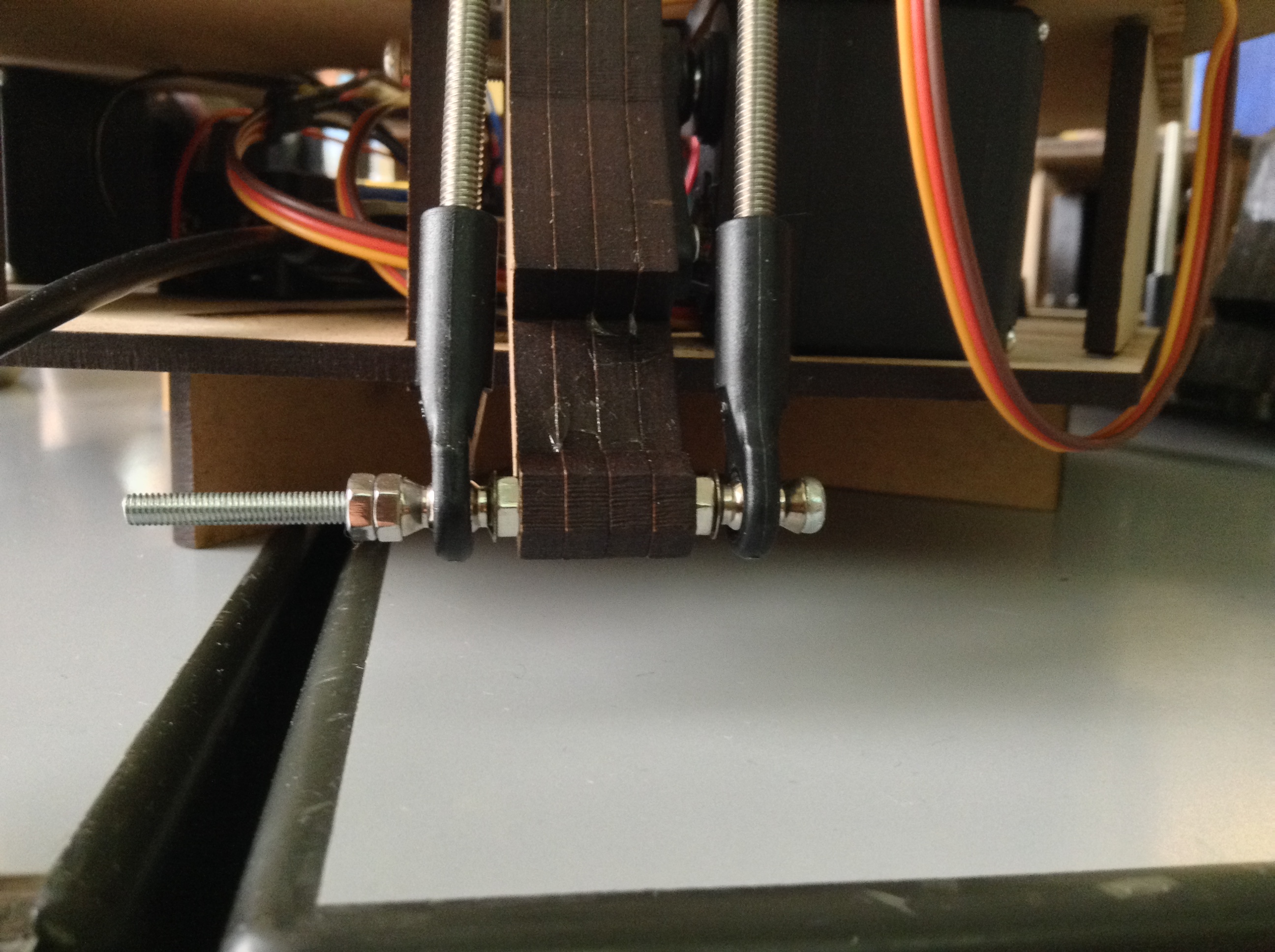
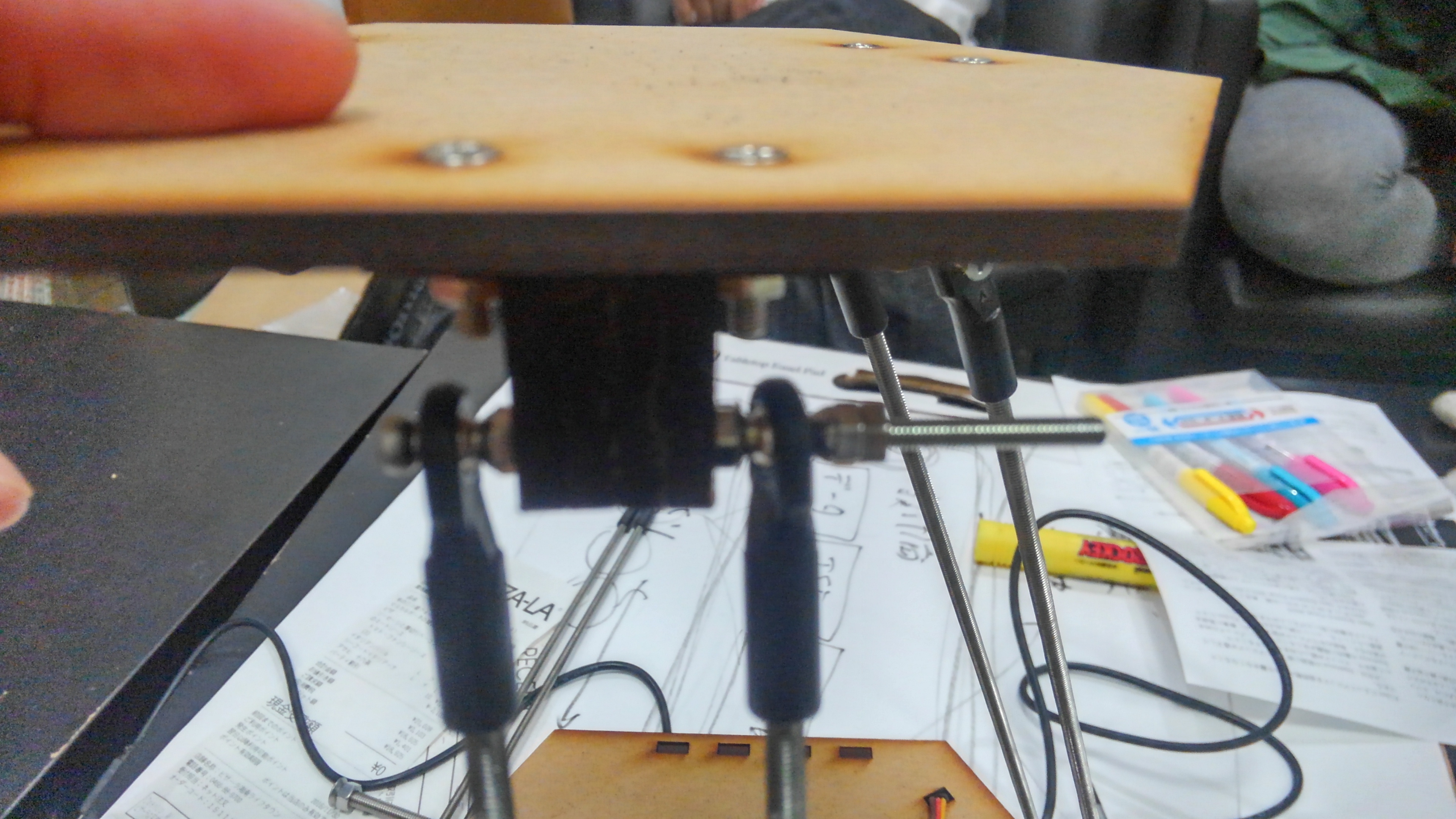
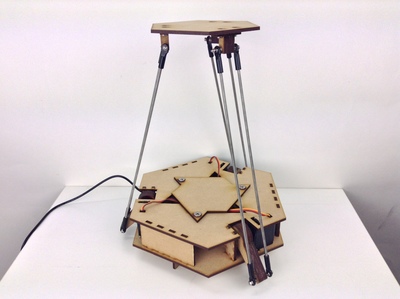
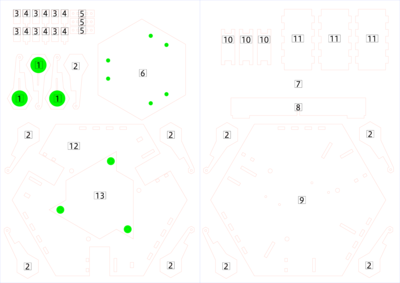
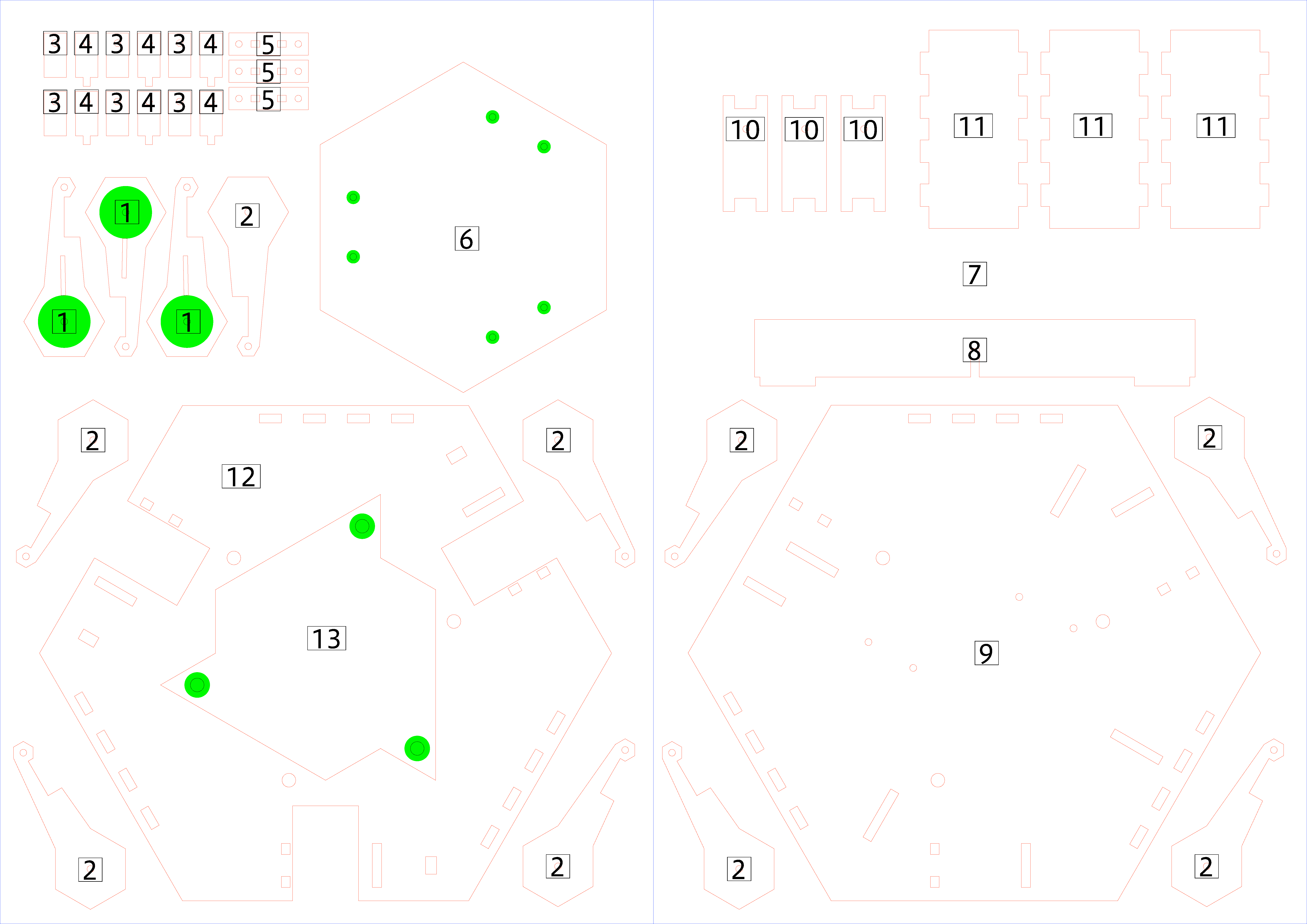
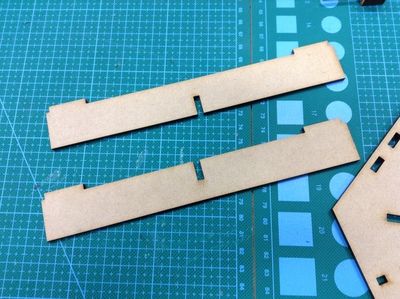
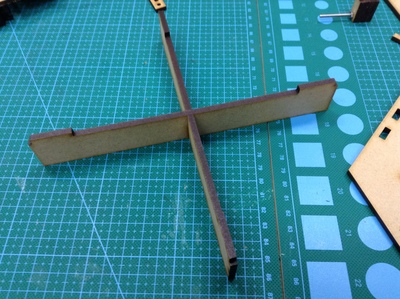
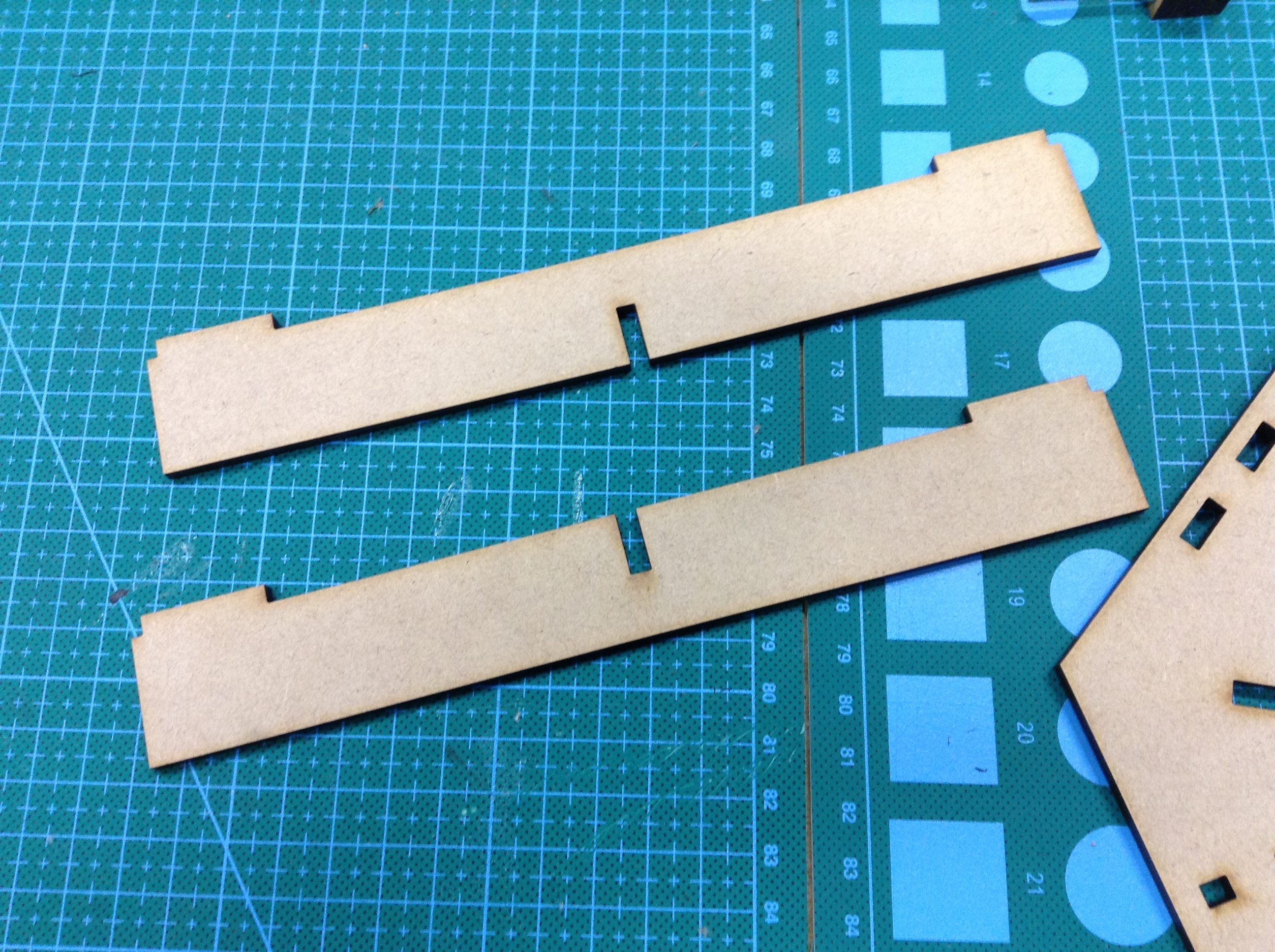
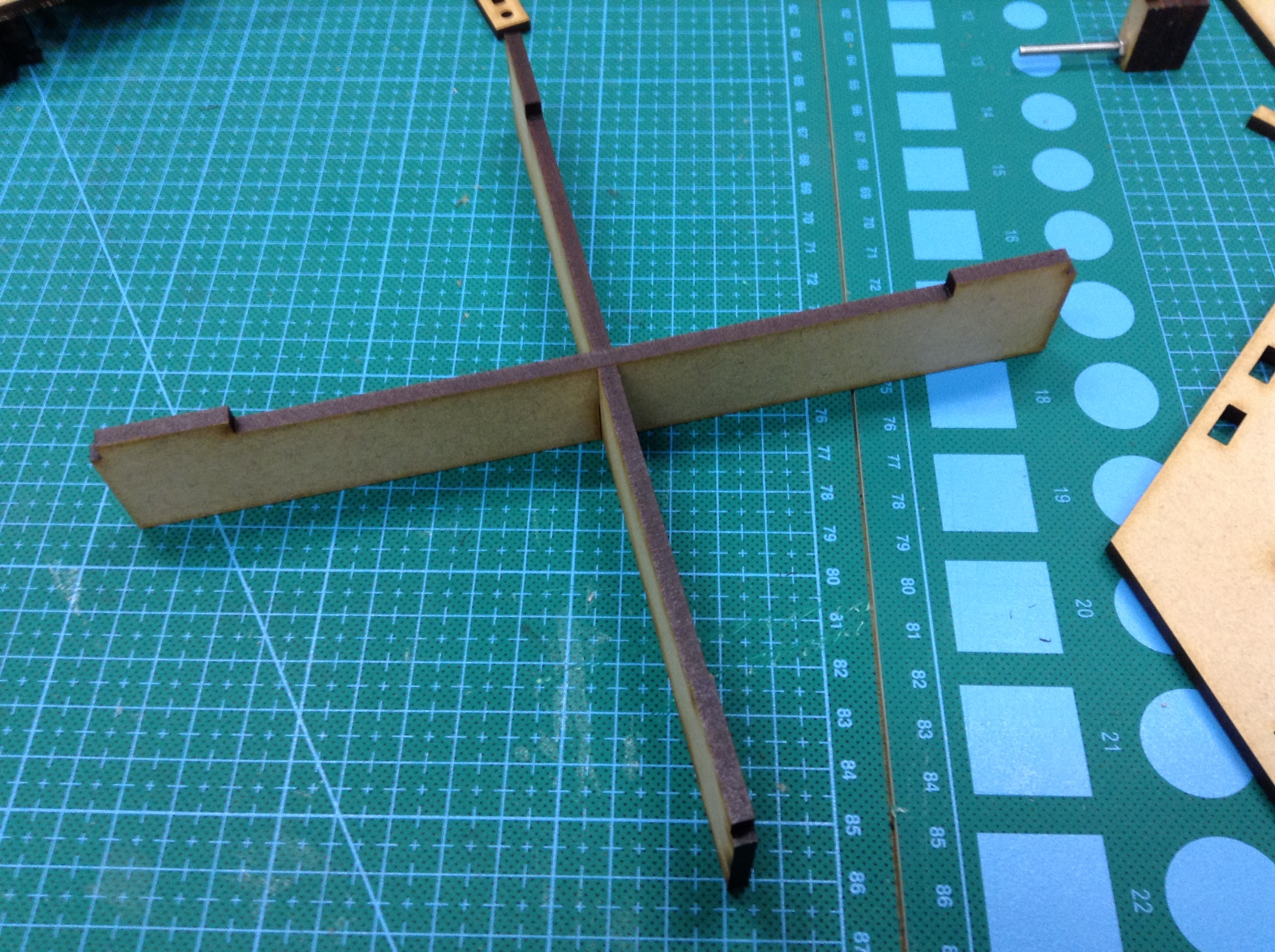
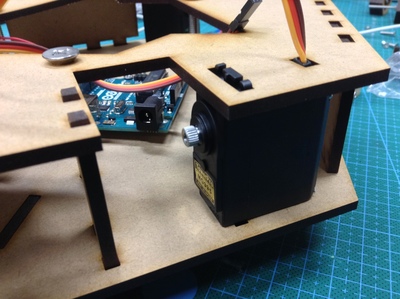
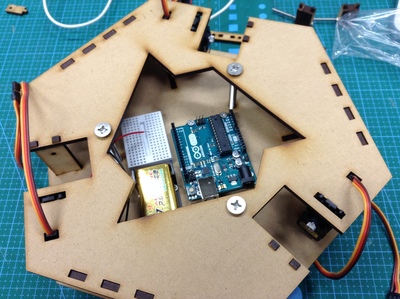
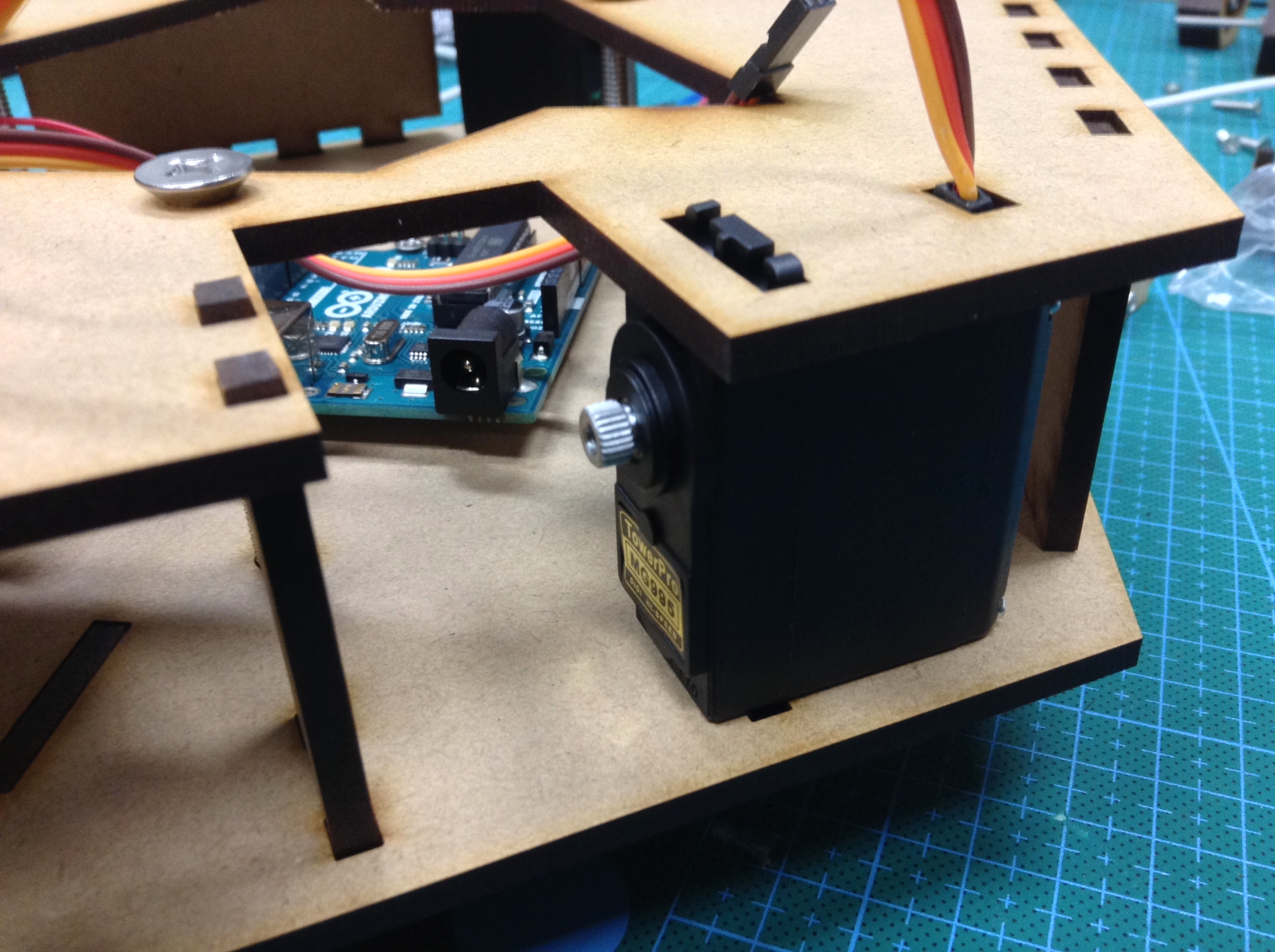
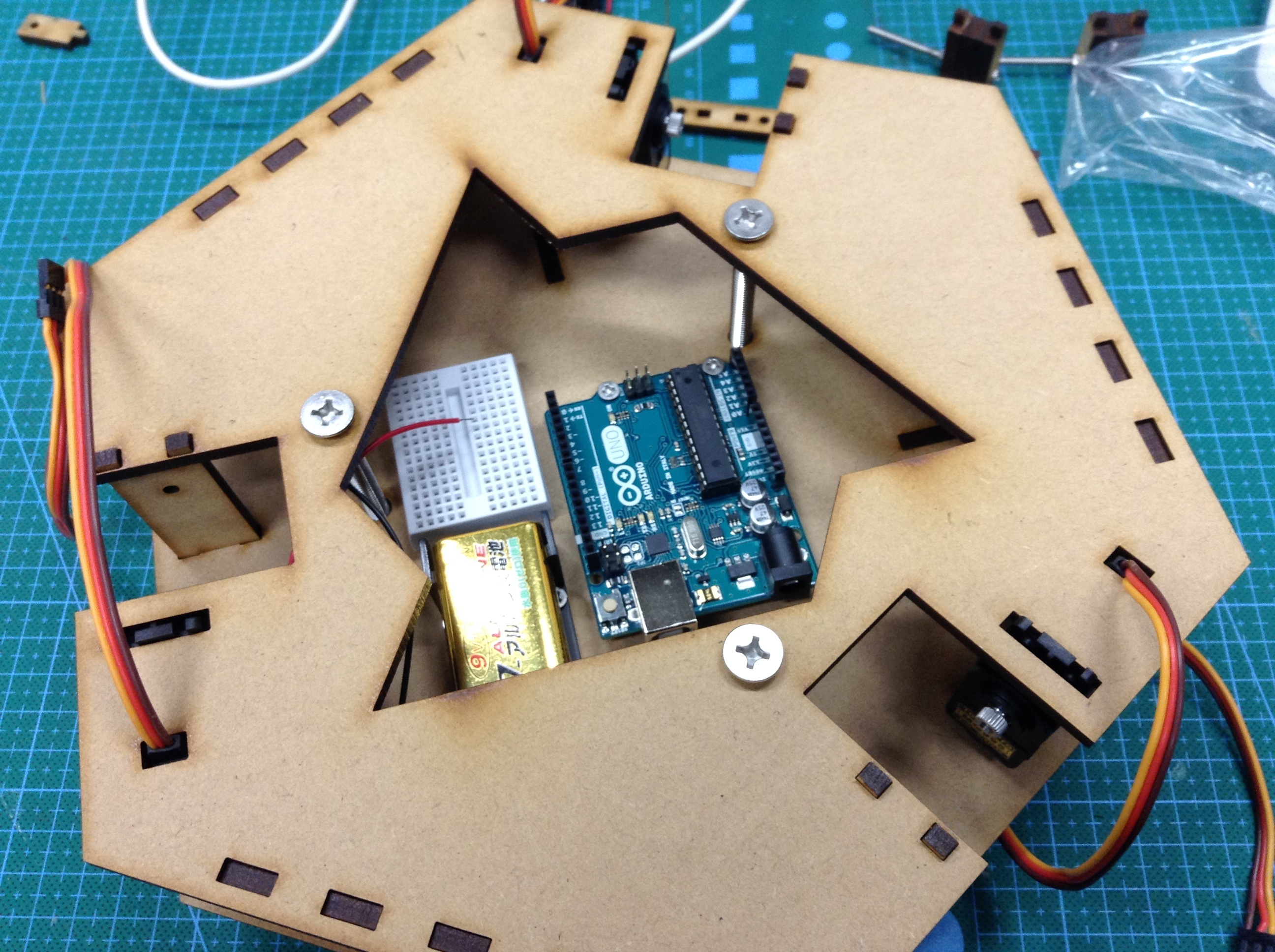
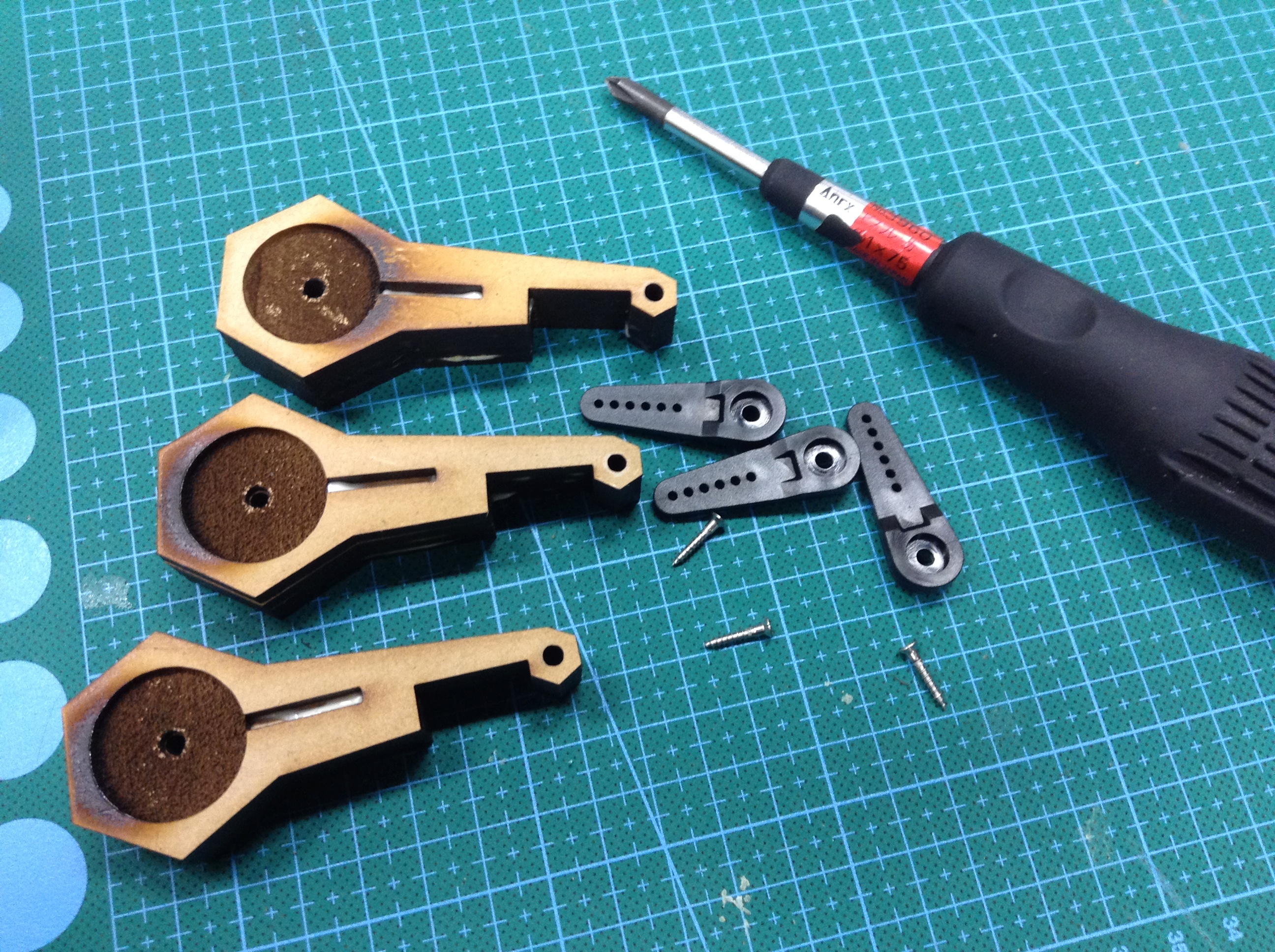
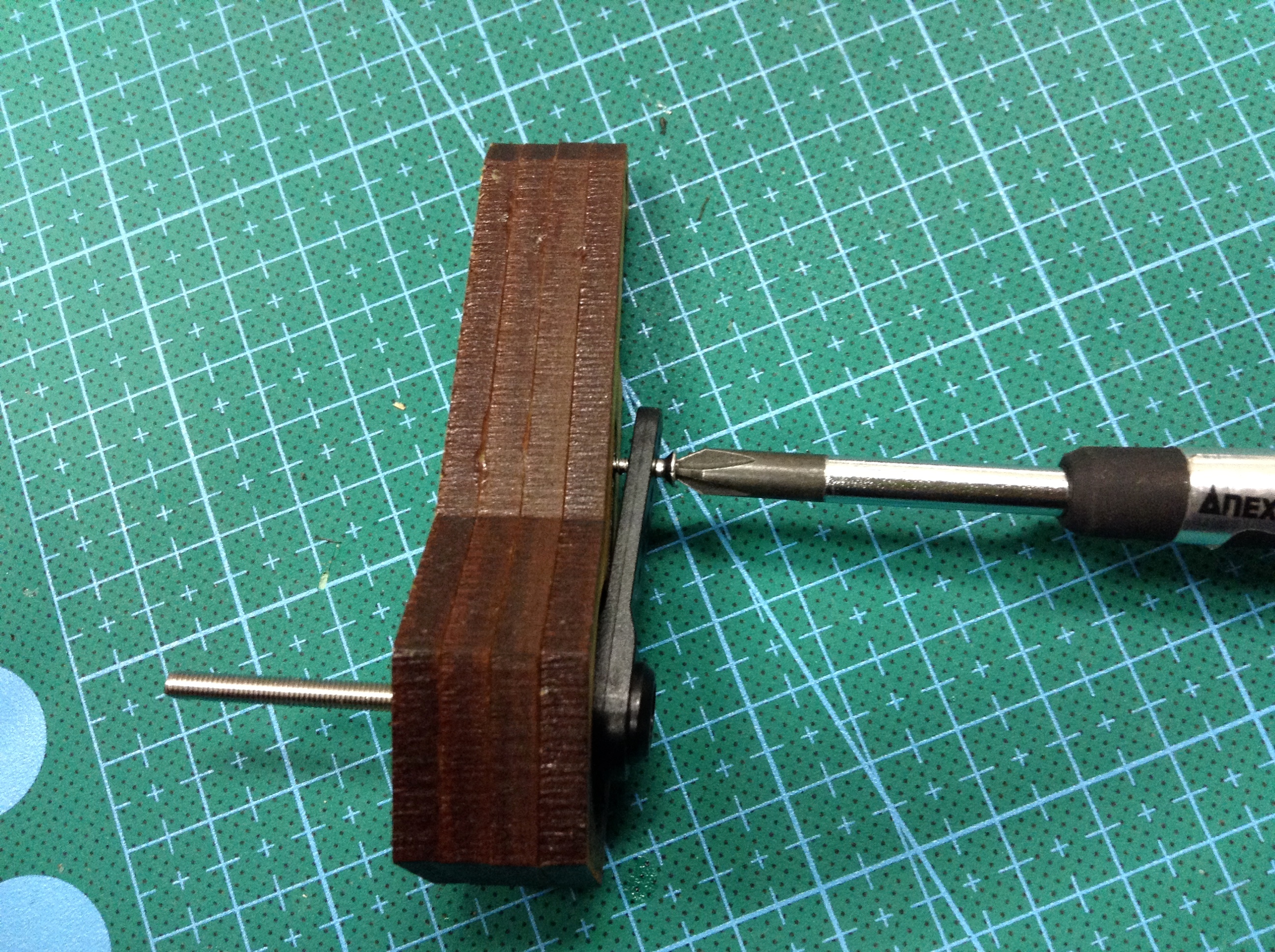
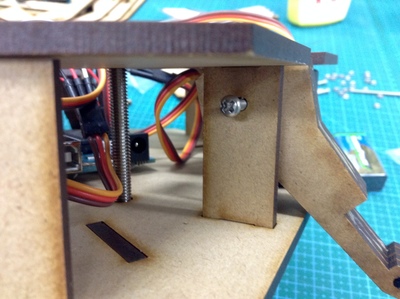
OCPC Delta Kit ver.1.5 の組み立て方です。
OCPCはOne CNC Per Childの略で、
100ドル以内でつくることのできる3D工作機械の原型となることを目指しています。
(企画) 慶應義塾大学 田中浩也研究室
(原案) 増田恒夫 田中浩也
(設計) 廣多岳 / (試作協力) 若杉亮介 望月美憂





















Comments