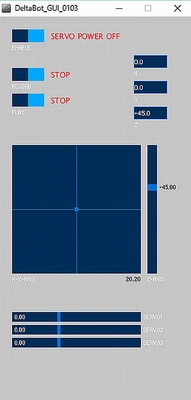
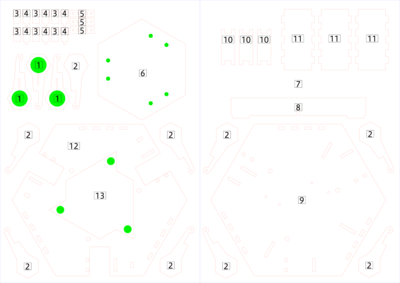
Processingを実行すると右のような画面が立ち上がります。
最初は"SERVO POWER OFF"になってしますので、[ENABLE]ボタンを押してPOWER ONにします。ここでサーボモータが反応するはずです。
※反応しないでエラーになる場合には「myPort = new Serial(this, Serial.list()[X], 9600)」という行の「X」部分の数字を0~9まで順番に変えてみて下さい。
[RECORD]ボタンを押すと動作を記録するモードに入ります(制限時間あり)
[PLAY]ボタンを押すと記録された動作を反復再生します。
何度でも[RECORD]をやり直すことができます。














































Comments