CHIRIMEN Servo

Owner & Collaborators
License

CHIRIMEN Servo by ChirimenEdu is licensed under the Creative Commons - Attribution-ShareAlike license.
Summary
CHIRIMENでサーボモータを制御する方法。
Materials
Tools
Blueprints
Making
- サーボモータとは、回転位置を制御することができるモータで、ロボットの関節部分などに用いられることが多い。
- 回転位置の検出器付きのモーターで、フィードバック制御されるものが一般的。
- サーボモータはPWM信号で制御されることが一般的。PWM制御とは電源オン/オフのパルス間隔を変化させることで制御を行う方式である。
- CHIRIMENからPWM信号を出力するために、I2Cインターフェースを持つサーボドライバを使用する。
- サーボドライバはI2Cの信号を受けて、PWM信号によってサーボモータを制御する。
- サーボモータアプリのダウンロード
- Web I2C Polyfillの導入
- サーボモータアプリの読み込み
- サーボモータ回路の配線
- アプリ実行
- サーボモータが動作しない場合の対処
- CHIRIMEN examplesをダウンロード(Download zipというボタンでダウンロード可能)して、任意のディレクトリに展開する。
- webi2c.jsとworker.jsをi2c-PCA9685/jsディレクトリ内にダウンロード(RAWボタンを右クリックして別名でリンク先を保存を選択)し、index.htmlからの参照先を以下のように変更する。(worker.jsはwebgpio.js内で参照されている)
- bowerを使える場合、i2c-PCA9685ディレクトリに移動し以下のコマンドを実行することで導入することもできる。
Comments
 CHIRIMENのファームウェア、CMN2015-1_B2GOS-20170301以降のバージョンを使用する場合、参照するpolyfillが異なります。http://qiita.com/tadfmac/items/fca2d6688a73dac6ccf6 をご覧ください。
CHIRIMENのファームウェア、CMN2015-1_B2GOS-20170301以降のバージョンを使用する場合、参照するpolyfillが異なります。http://qiita.com/tadfmac/items/fca2d6688a73dac6ccf6 をご覧ください。
- Web IDE左上の「パッケージ型アプリを開く」からi2c-PCA9685ディレクトリを読み込む。
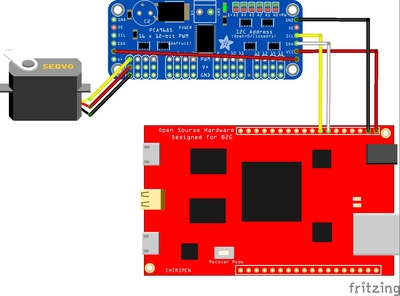
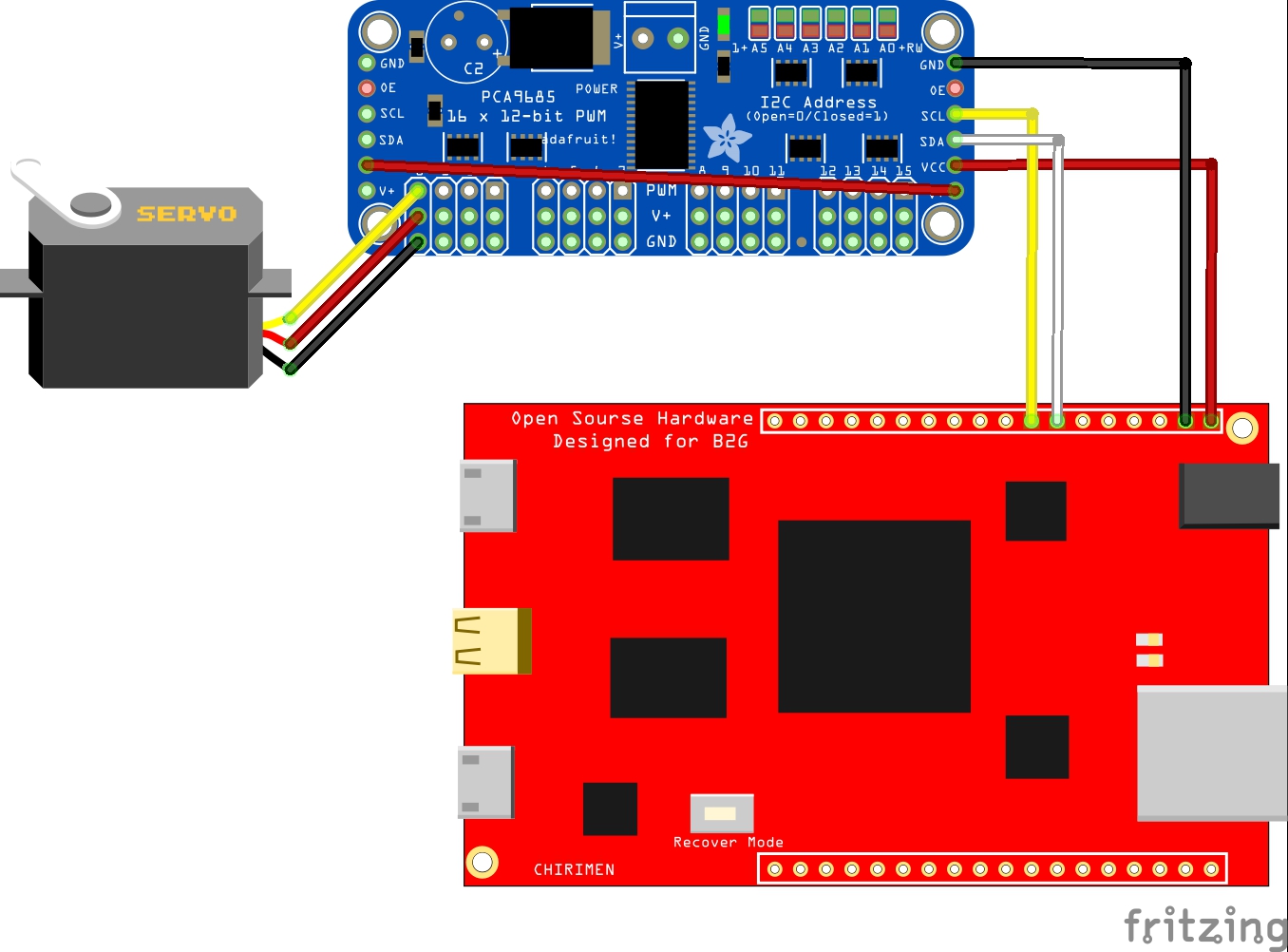
- 配線図に従ってサーボモータ、サーボドライバを接続する。接続にはスルーホール用ジャンパ線を用いる。
- CHIRIMENのI2C0_SDA(CN2-12)、I2C0_SCL(CN2-11)とサーボドライバのSDA、SCLを接続する。
- CHIRIMENのGND(CN2-1)、VCC(CN2-18)とサーボドライバのGND、VCCを接続する。
- サーボドライバのV+(モータ用の電源入力)とVCCを接続する。
- サーボモータのPWM、V+、GNDとサーボドライバのPWM、V+、GNDを接続する。
- 配線が正しいことを確認し、CHIRIMENとPCを接続する。
- アプリをインストールする。
- 正しく動作すればサーボモータが回転し始めることが確認できる。
- サーボモータを動かすとCHIRIMENが落ちるという現象が発生。サーボモー タは多くの電力を必要とするため、PCのUSB端子(500mA電源)から電源供給する場合、駆動電力不足となる場合がある。以下の対処により回避できることがある。
- サーボモータへの供給電力を3.3Vにしてみる。
- CHIRIMENに対して1A以上(2A推奨)の電流を供給する。
- サーボドライバへの電源供給をCHIRIMENと別系統で用意する。
- サンプルプログラムのindex.html、main.jsについて解説する。
- Index.htmlでpolyfillの読み込みを行う
- I2CAccessインターフェースを取得する(おまじない)
- I2C端子の初期設定を行う
- サーボドライバのコンストラクタ呼び出し
- サーボドライバの初期化
- 温度センサの読み取り
- 温度センサの読み取り後の処理
- i2cAccess.ports.get(<ピン番号>)でi2cPortオブジェクトを取得する。code:I2CPortオブジェクトの取得。
- CHIRIMENにはI2C0(CN2側)、I2C2(CN1側)の二つの端子が出ているため、ピン番号には0か2を指定する。
- サーボドライバ(PCA9685)のライブラリを読み込む。code:サーボドライバライブラリの読み込み
- new PCA9685(<i2cPortオブジェクト>,<i2cデバイスアドレス>)でPCA9685のコンストラクタ呼び出しを行う。code:PCA9685コンストラクタ呼び出し
- PCA9685使用サーボドライバのデバイスアドレスは初期値が0x40なので、これを指定する。
- pca9685.init(<最小パルス>,<最大パルス>,<角度範囲>)のように、呼び出したコンストラクタのinitメソッドを使用してサーボドライバの初期化を行う。code:サーボドライバの初期化
- 最小パルス、最大パルス、角度範囲はサーボモータの型番毎に設定されている値であり、データシートを読み取り設定する。サンプルコードではSG90というサーボモータの設定が入力されている。
- サーボドライバの初期化処理の結果はPromise型で帰ってくる。そのため、pca9685.init().then(function(){ //サーボドライバ初期化後の処理 });のように記述する。code:サーボドライバ初期化後の処理
- サーボドライバの初期化後、pca9685.setServo(<チャンネル>,<角度>)のようにsetServoメソッドを利用してサーボモータを指定の角度に制御することができる。code:サーボモータの制御
- チャンネルはサーボドライバにサーボモータを接続しているチャンネルを指定する。
- 角度はサーボモータで制御可能な角度範囲内で整数で指定する。
- サーボモータの制御後の結果はPromise型で帰ってくる。そのため、pca9685.setServo().then(function(){ //サーボモータ制御後の処理 });のように記述する。code:サーボモータ制御後の処理
References
Usages
Project comments

Comments