CHIRIMEN 2WD Draft0.2(on editing)
Owner & Collaborators
License

CHIRIMEN 2WD Draft0.2(on editing) by noga335 is licensed under the Creative Commons - Attribution license.
Summary
https://www.servocity.com/html/actobitty_2_wheel_robot_kit.html#.Vl_mob_jGYI
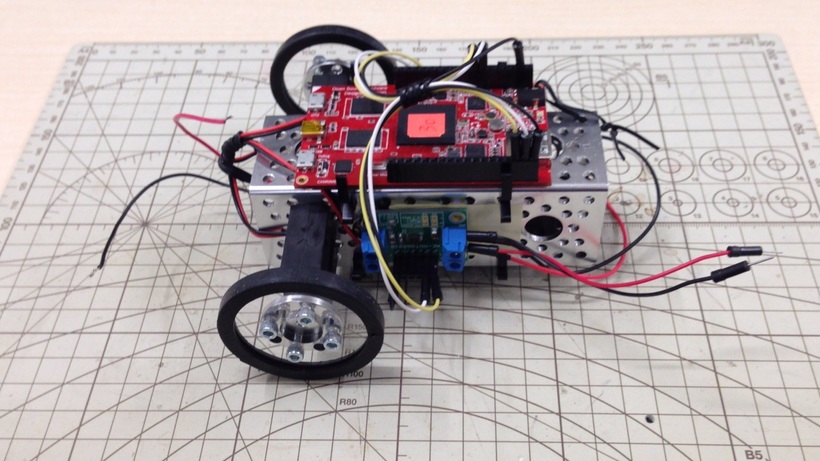
これにCHIRIMENを載せる!簡単にいうとリモコンカーをつくり、リアルタイム制御のソフトを書く練習をしようというのが目的です。
(興味のある人はご連絡ください。)
これにCHIRIMENを載せる!簡単にいうとリモコンカーをつくり、リアルタイム制御のソフトを書く練習をしようというのが目的です。
(興味のある人はご連絡ください。)
Materials
Tools
Blueprints
Making
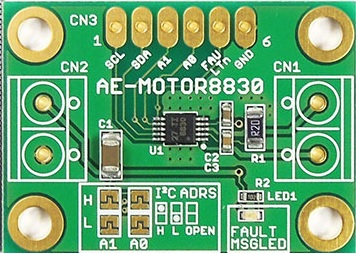
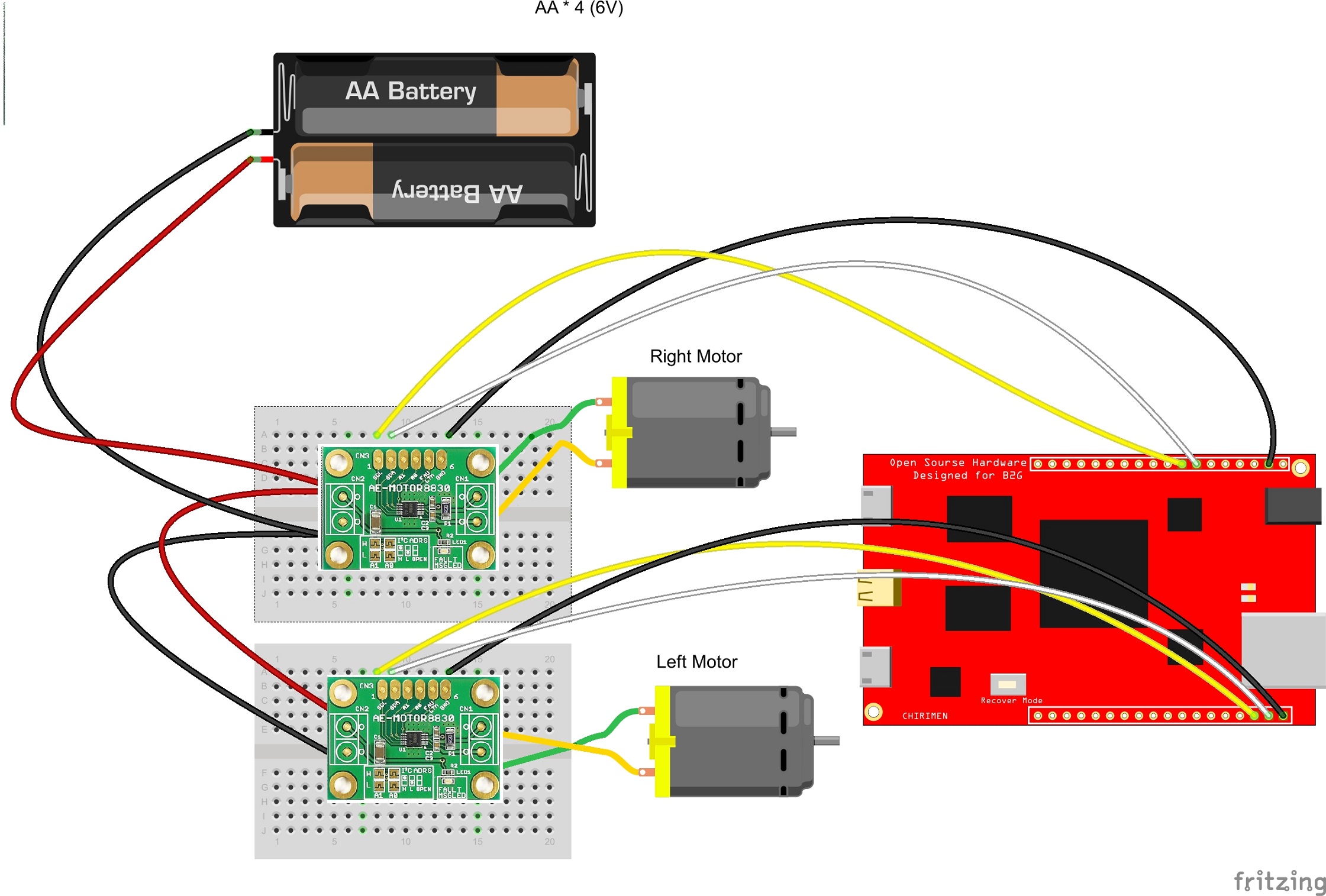
- DRV8830を基板化したもの。各社からでています。ここでは秋月電子のものを利用。
http://akizukidenshi.com/catalog/g/gK-06489/
これ1枚でモータ1台を制御。複数扱うものでも良かったけれど、ボディに載りそうな手持ちがあったのでこれを利用。ちなみに3㎜のネジ穴はボディにあらかじめ空いている穴と合致。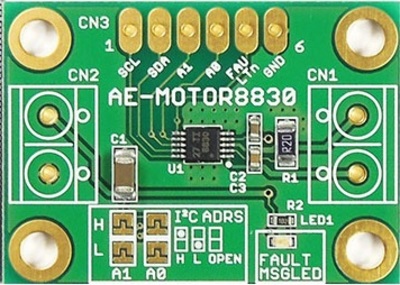
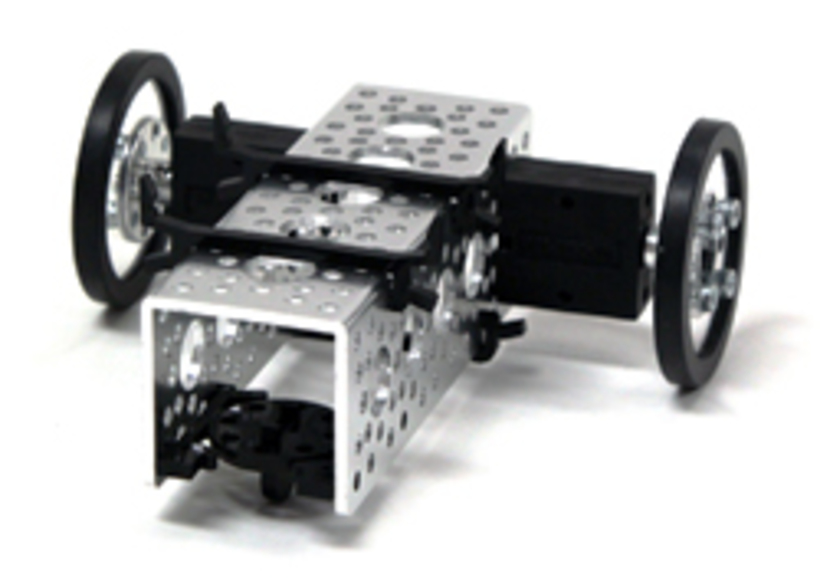
BODY
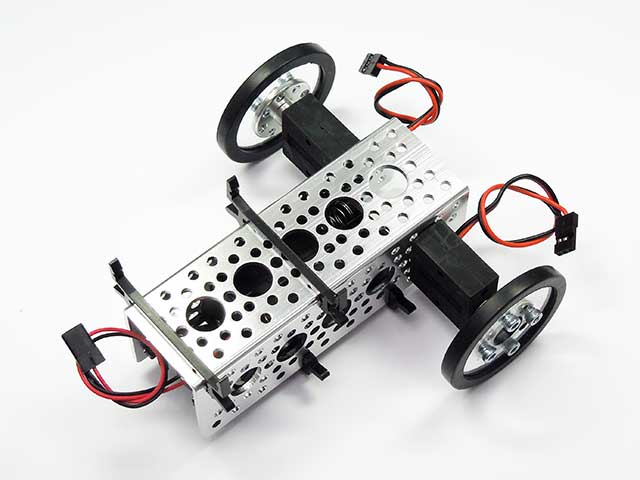
0 秋月電子扱いの以下のキットを利用しています。
秋月電子扱いの以下のキットを利用しています。
http://akizukidenshi.com/catalog/g/gK-08456/
左右の車輪ごとにギアー付モータがついたもの。右のモータ単体に電源を繋ぐと左に回ります。モータ自身は右も左も同じものなので、極性を逆にして利用しています。
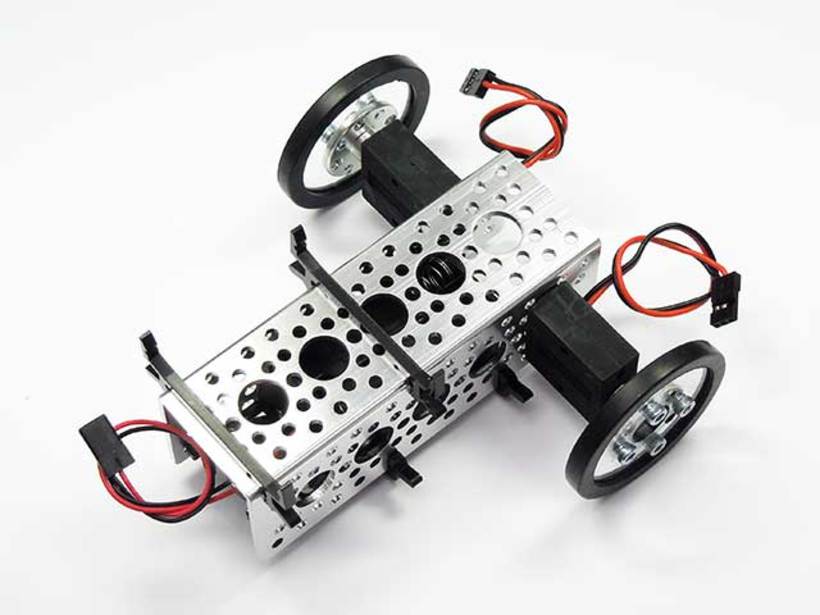
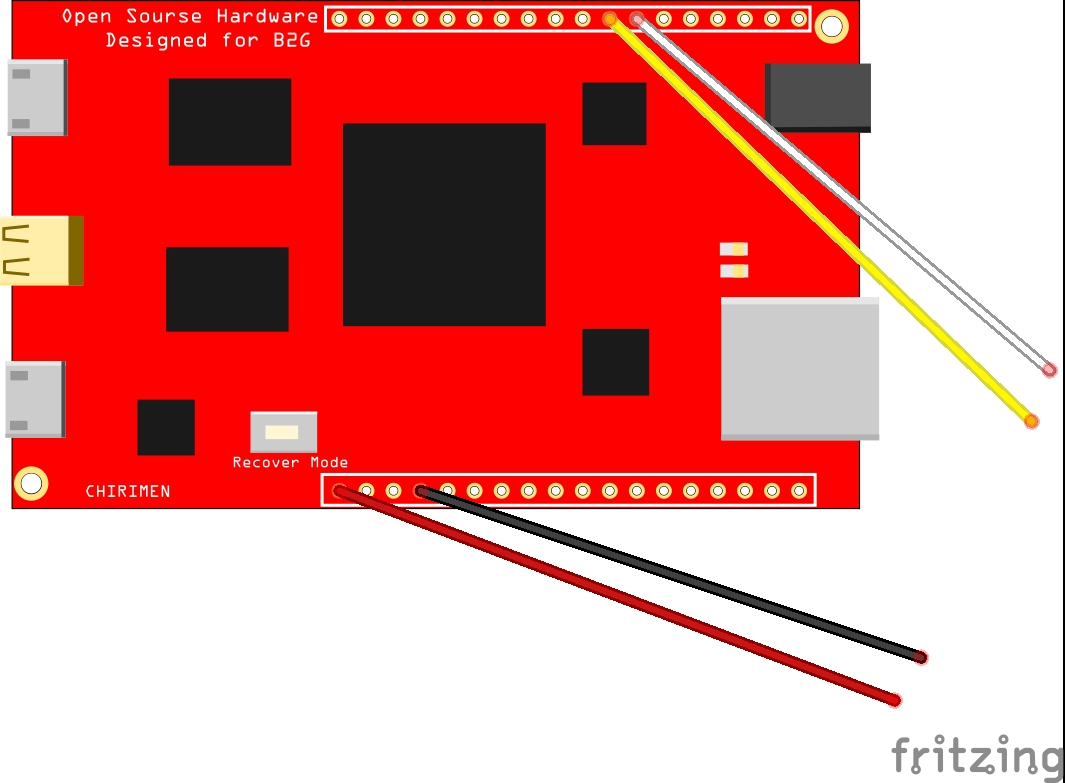
前の方にでている赤黒の線はバッテリの線。
2つの車輪があって、ボディの下に支柱になる突起があって、合わせて3点で床の上におけます。http://www.robotzone.com/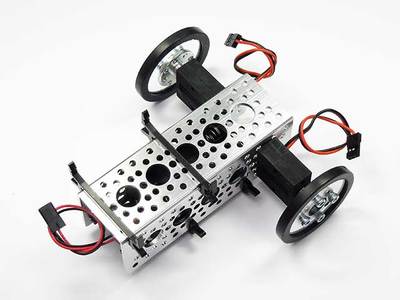
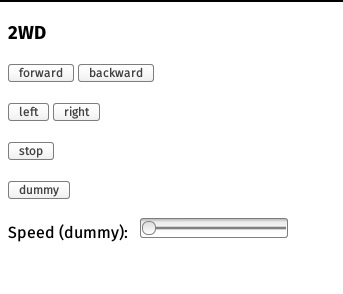
- とりあえず、HDMIのDisplay上ににボタンを出して、これをクリックすることで操作しようと考えています。
画面のfowardをクリックすると両輪が動作。
leftは右車輪のみが動作。
backwardは両輪が逆転なのですが、ICの制約で、stopをかけ、速度を落として、両輪逆転としています。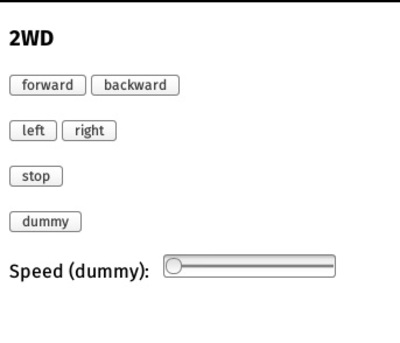
- <button id="submitButton-f">forward</button>
<button id="submitButton-b">backward</button><br /><br />
...
(index.html)
とりあえずボタンに機能をまとめる方針
- navigator.requestI2CAccess().then(
function(i2cAccess) {
var port = i2cAccess.open(0);
var port2 = i2cAccess.open(2);
port.setDeviceAddress(0x64); // c8*1/2
port2.setDeviceAddress(0x64); //
...
port,port2で左右分け! - document.onkeydown = function (e){
if(!e) e = window.event;
// for debug
console.log(e);
}
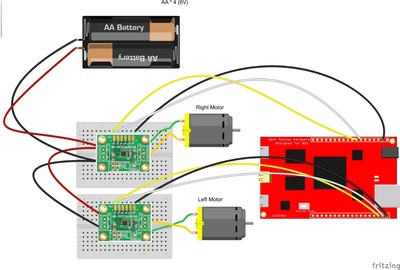
HDMIの画面にクリックは、リモコンカーとして現実的でないので、基板のUSBにkeyboardを繋いで、制御したい。このための準備 - 配線図を描いているソフトウェアです。特定の部品だけ回転させたり、配置を変えても結線はそのまま。実物で実際に作成している雰囲気です。回路図も書いてくれます。
Frizing:
http://fritzing.org/download/
Frizing data for CHIRIMEN
https://github.com/MozOpenHard/CHIRIMEN-tools/tree/master/Fritzing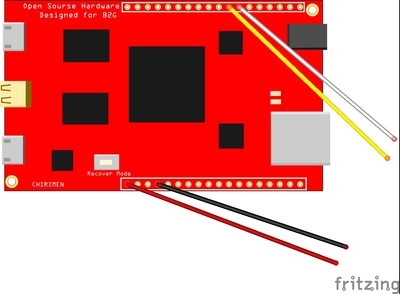

References
Usages
Project comments

Comments