今年高校に入学しやれることが増えたなか手に入れた技術をどう使うかそれを 考えた結果人を助けるデバイスを作ろうと思い始めたプロジェクトです。 最後まで読んで頂けるとありがたいです!
「羅針腕」(rashinwan)

Owner & Collaborators
License
「羅針腕」(rashinwan) by so-so-F2 is licensed under the Creative Commons - Attribution-NonCommercial-ShareAlike license.
Summary
これは高校生になって初めて触れた新しい力を最大限に発揮した5ヶ月間の記録です!
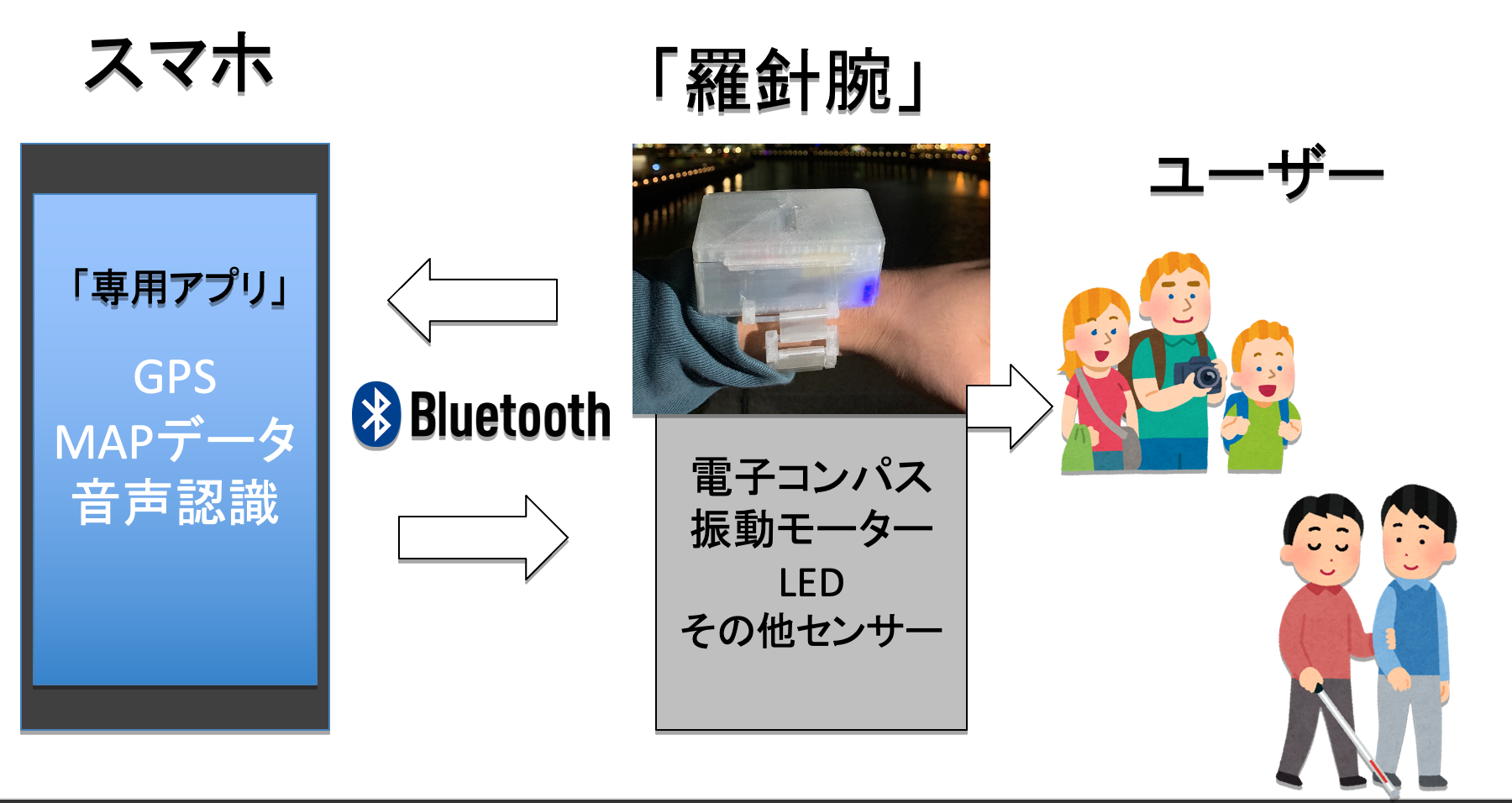
今回僕は目的地の方向に向いた時に振動することによって道案内するデバイス「羅針腕」(rashinwan)の作成に挑みました。
コンセプトとしては地図アプリによる歩きスマホ問題を解決し地図を読むのが下手なかた、視聴覚障害のかたや文字や読めない外国人の方など誰もが安心して使えるわかりやすい道しるべを作ると言うものです。
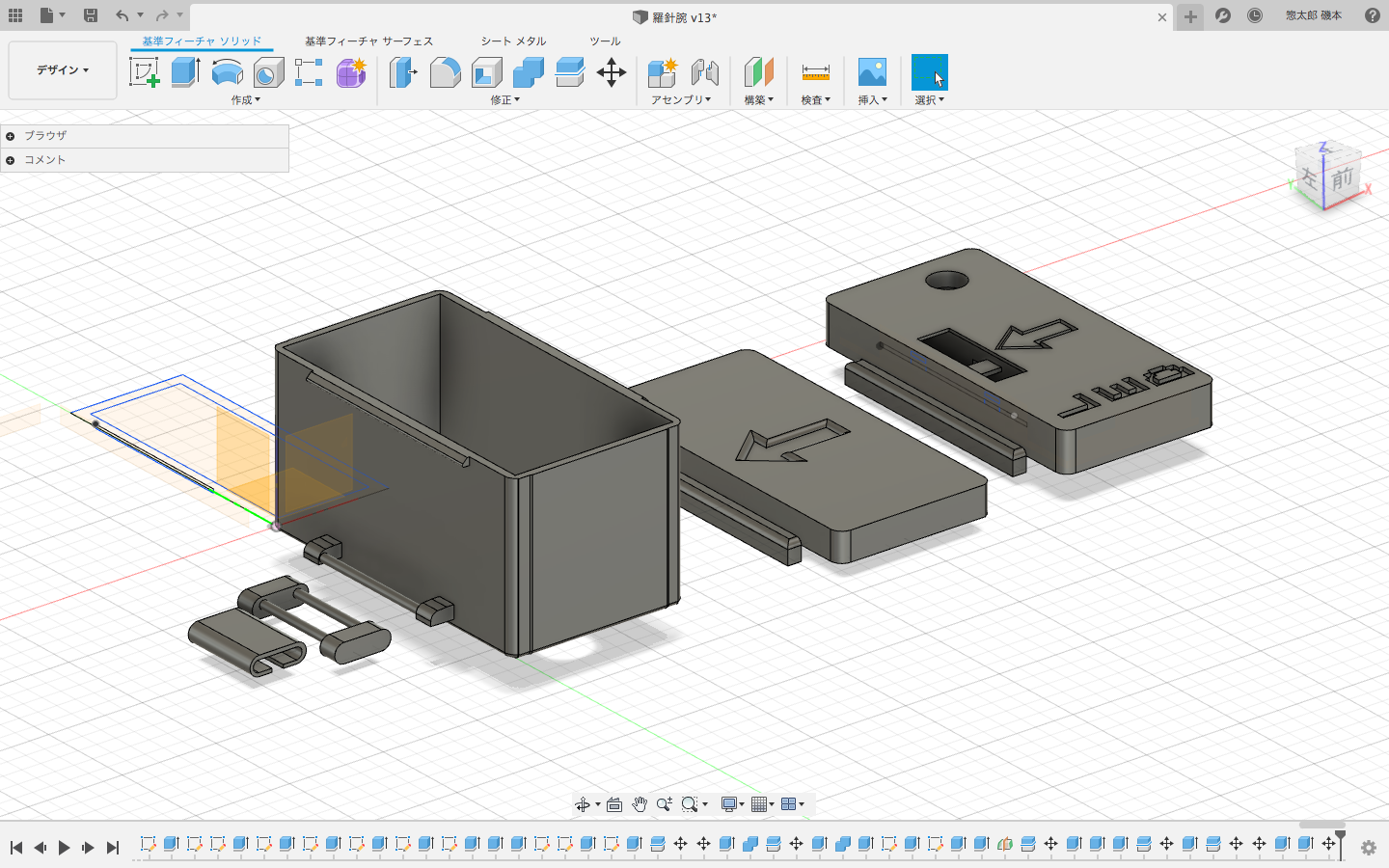
また、自分好きなように形を変えることが出来るという点から3Dプリンター特有の拡張性を見せていきたいと思っています
今回僕は目的地の方向に向いた時に振動することによって道案内するデバイス「羅針腕」(rashinwan)の作成に挑みました。
コンセプトとしては地図アプリによる歩きスマホ問題を解決し地図を読むのが下手なかた、視聴覚障害のかたや文字や読めない外国人の方など誰もが安心して使えるわかりやすい道しるべを作ると言うものです。
また、自分好きなように形を変えることが出来るという点から3Dプリンター特有の拡張性を見せていきたいと思っています
Materials
Tools
Blueprints
Making
- 誰もが過ごしやすい街を作る助けになるものを作るという目標から、視覚情報に頼らず直感的に操作できる道案内デバイスというこの羅針腕をにたどり着くきっかけとなった2つの経験があります。
①
0 一つ目の経験は今通っている高校に入学が決まってまだ日が浅い頃、最寄り駅の周りを散策していたときに始めて場所ということもあり迷ってしまい地図アプリを見ながら慌てて道を探していると前のお婆ちゃんに気づかずぶつかってしまったという経験です。幸い怪我はなく急いで謝り許してもらえましたが歩きスマホの危険性をしみじみと感じました。
一つ目の経験は今通っている高校に入学が決まってまだ日が浅い頃、最寄り駅の周りを散策していたときに始めて場所ということもあり迷ってしまい地図アプリを見ながら慌てて道を探していると前のお婆ちゃんに気づかずぶつかってしまったという経験です。幸い怪我はなく急いで謝り許してもらえましたが歩きスマホの危険性をしみじみと感じました。

②
0二つ目の経験は中学の修学旅行で京都に行ったときの事です碁盤目状の土地では今自分が何処の通りにいるのか分からず同じところをぐるぐると回ってしまい交番や地域の方に生き方を聞いてなんとか目的地に辿り着いたり、同じく道に迷っている外国人の観光客に三日間で3、4回道を聞かれなんとか身振り手振りで教えたことがありました。
- まず視覚以外に何で情報を伝えるか考えました。視覚に頼らないので後人間に残された感覚は聴覚、味覚、触覚、嗅覚の四つです。 この中から聴覚は周りの音が聞こえず危なく、味覚は情報の伝え方が難しく(目的地の方向向いたら甘いシロップを口に流すとか?)嗅覚は周りの匂いに影響されまた影響を与えそうということで触覚を使うことにしました。
発見
0どの感覚で情報を伝えようか考えている中で五感が失われてしまっている障害者の方にも使っていただけるかもと思いつきました。- 先生にこのアイデアを話した結果スマホとマイコン基盤を連携させるBlynkというアプリを教えてもらい、スマホのセンサーを使ってデバイスを動かせることを知りそれをもとにアイデアスケッチを描きました。
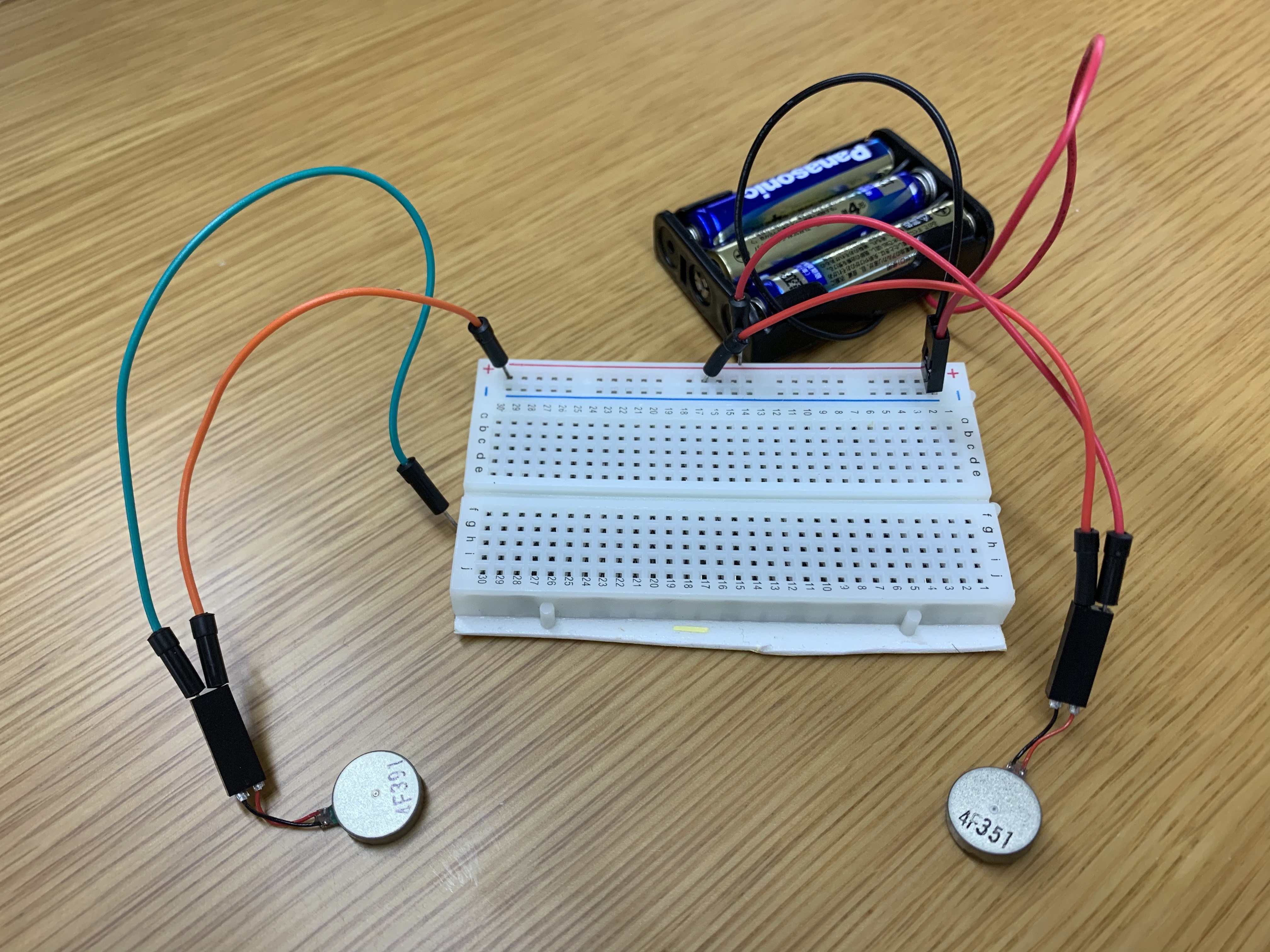
4、試作
0- アイデアが決まったら材料の買い出しです。先生や友達に教えてもらい秋葉原の秋月電子通商に買いに行きました。


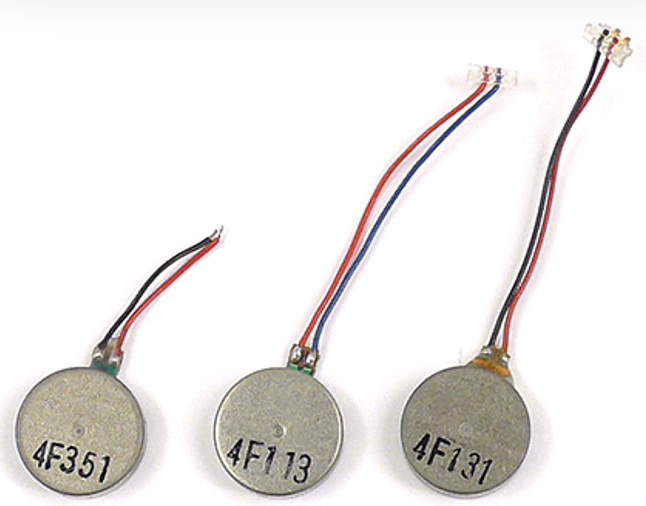
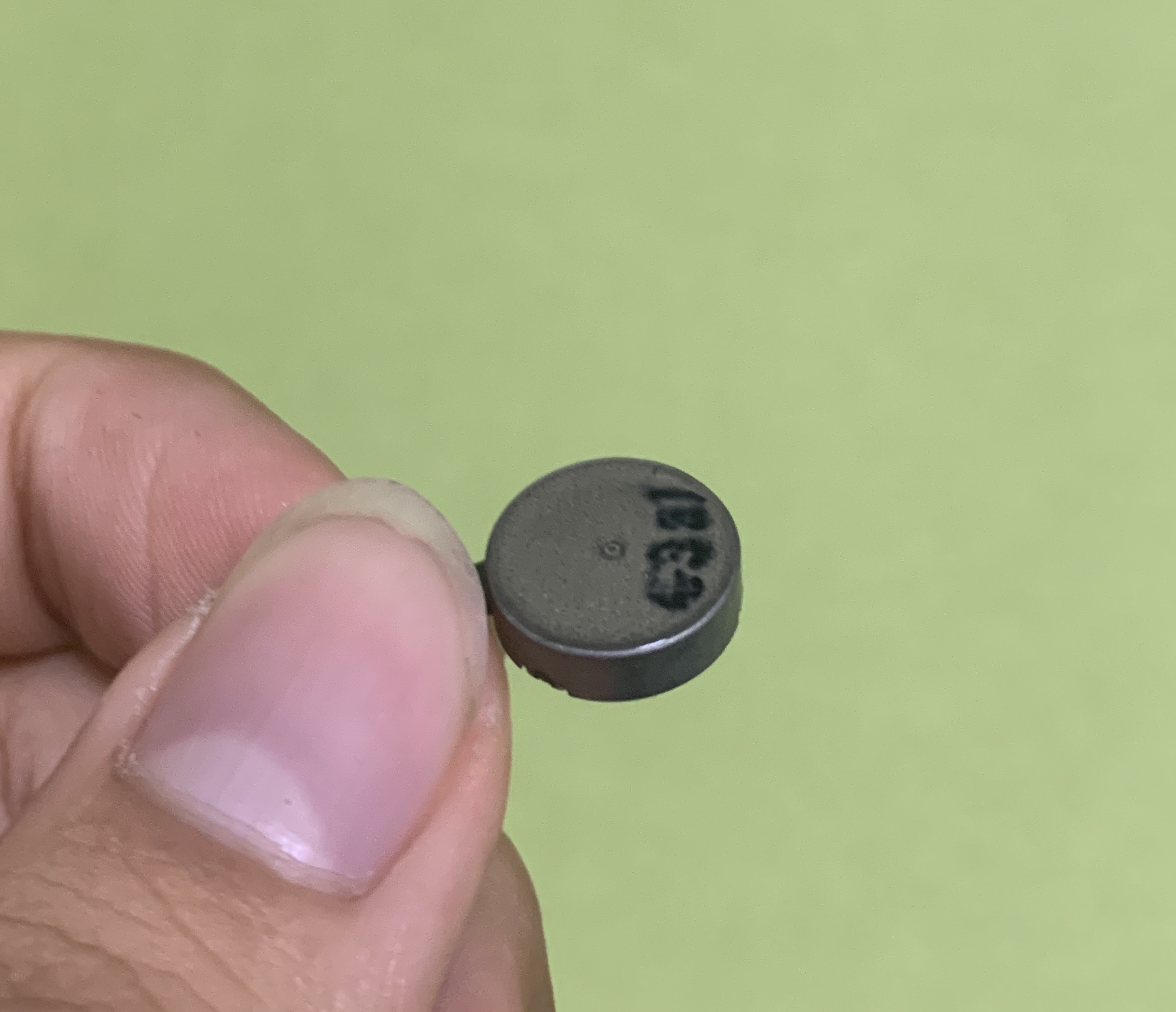
- Arduino micro振動モーターBluetoothモジュール[AE-RN4020-XB]電池ボックス9軸センサー[AE-BMX055](磁気3軸、ジャイロ3軸、加速度3軸)
発見2
0この時磁気センサーだけを買いに行ったのですがジャイロセンサーと加速度センサーもついているのを発見しジェスチャーでモード変更できるようにするアイデアを思いつきました。- ここで問題発生Arduino microとBluetoothモジュールの相性が悪くBlynkと通信できず失敗に終わりました
- 先生からのアドバイスを受けすでにBluetoothモジュールが搭載されているESPr32とESP仕様の9軸センサーを追加購入しました。Bluetoothモジュールがすでに組込まれているのとセンサーが専用のものであることからスムーズに動作実験させることができました。


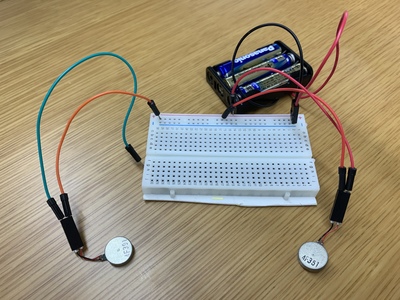
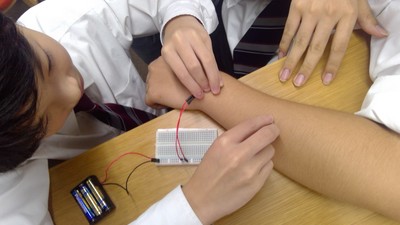
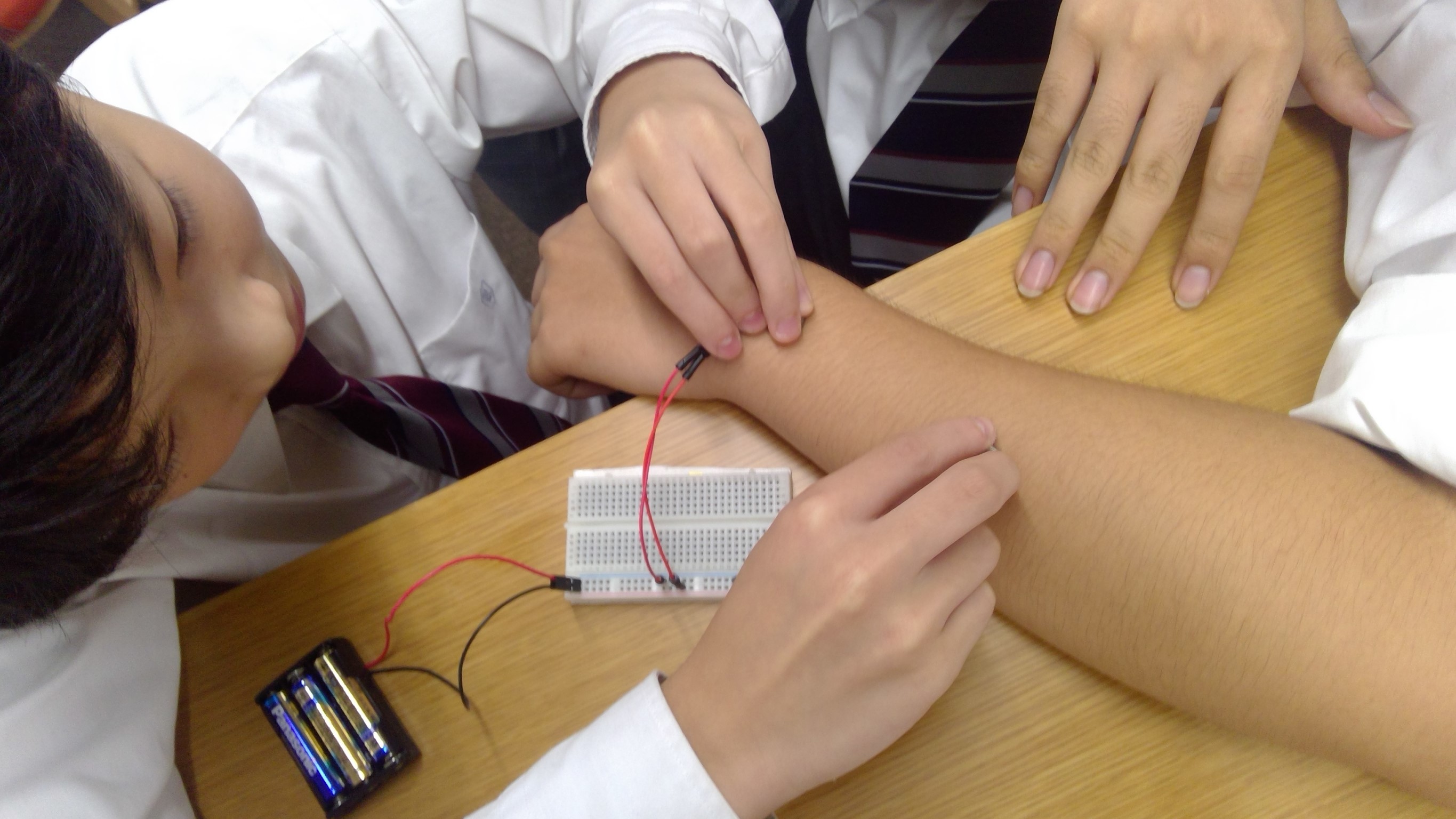
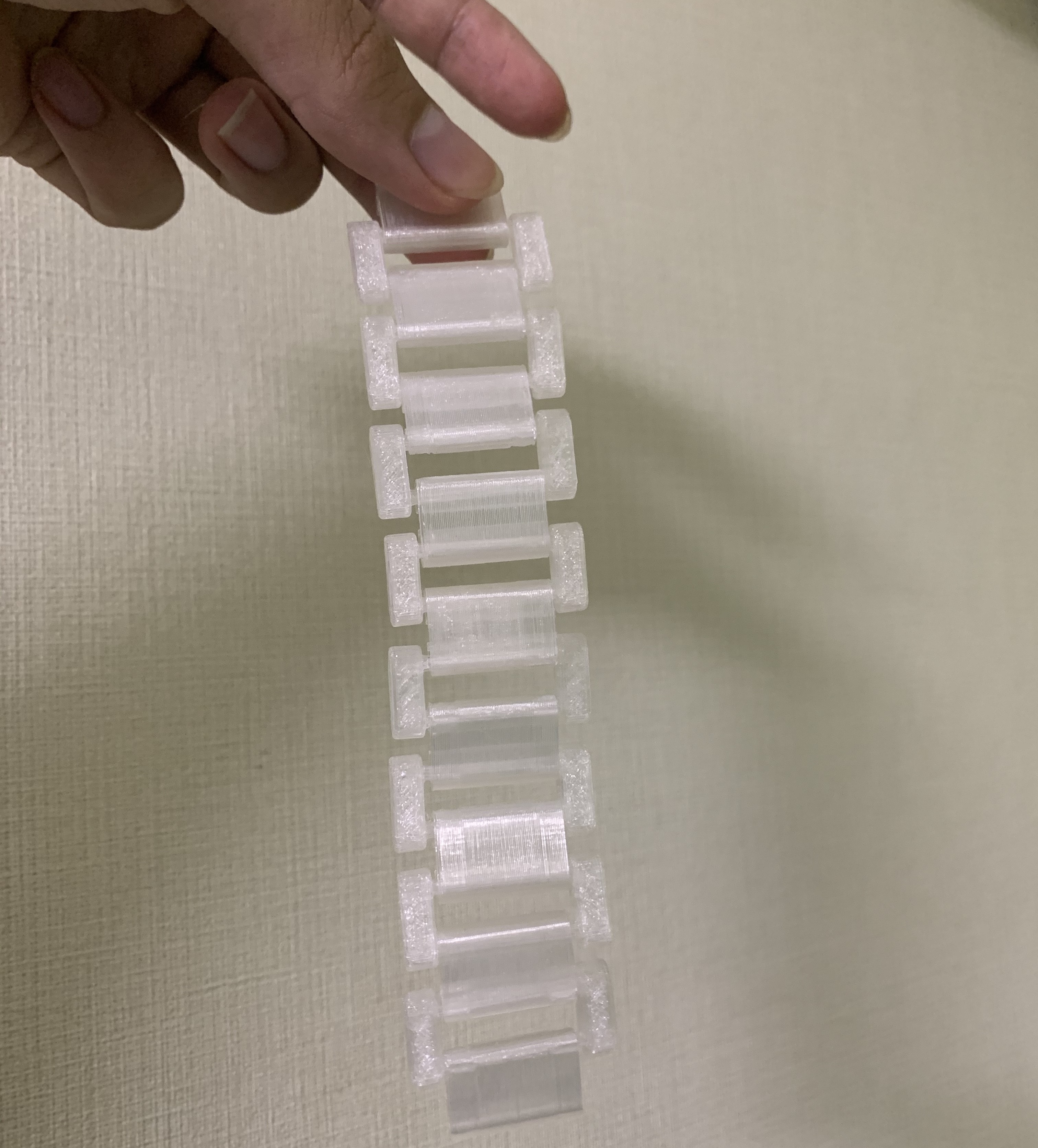
- 振動を使うにあたって重要視したのが空間分解能です。空間分解能とは体の二点を同時に触られた時にその触られた場所が違う場所と感じる能力です。電気通信大の下条誠さんの文献電気通信大学の下条誠さんの文献(クリックすると見れます。)を参考にしたり友達に手伝ってもらったりして確かめました。首や足首様々ところを試した結果腕につけることにしました。そしてこれを参考にデバイスの振動モーターをつける位置を決めました。
名前
0つける場所を腕にした時に名前を決めました。みんなを導くところから羅針盤それにつける場所の腕を足して「羅針腕」となずけることにしました
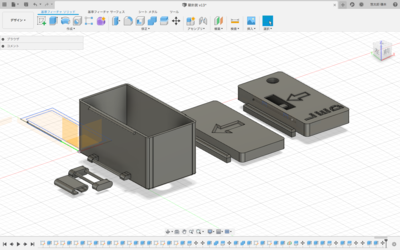
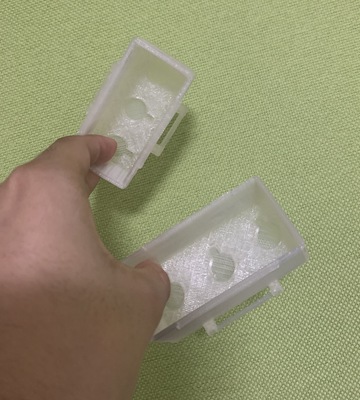
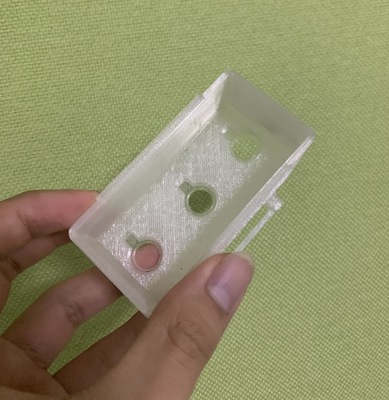
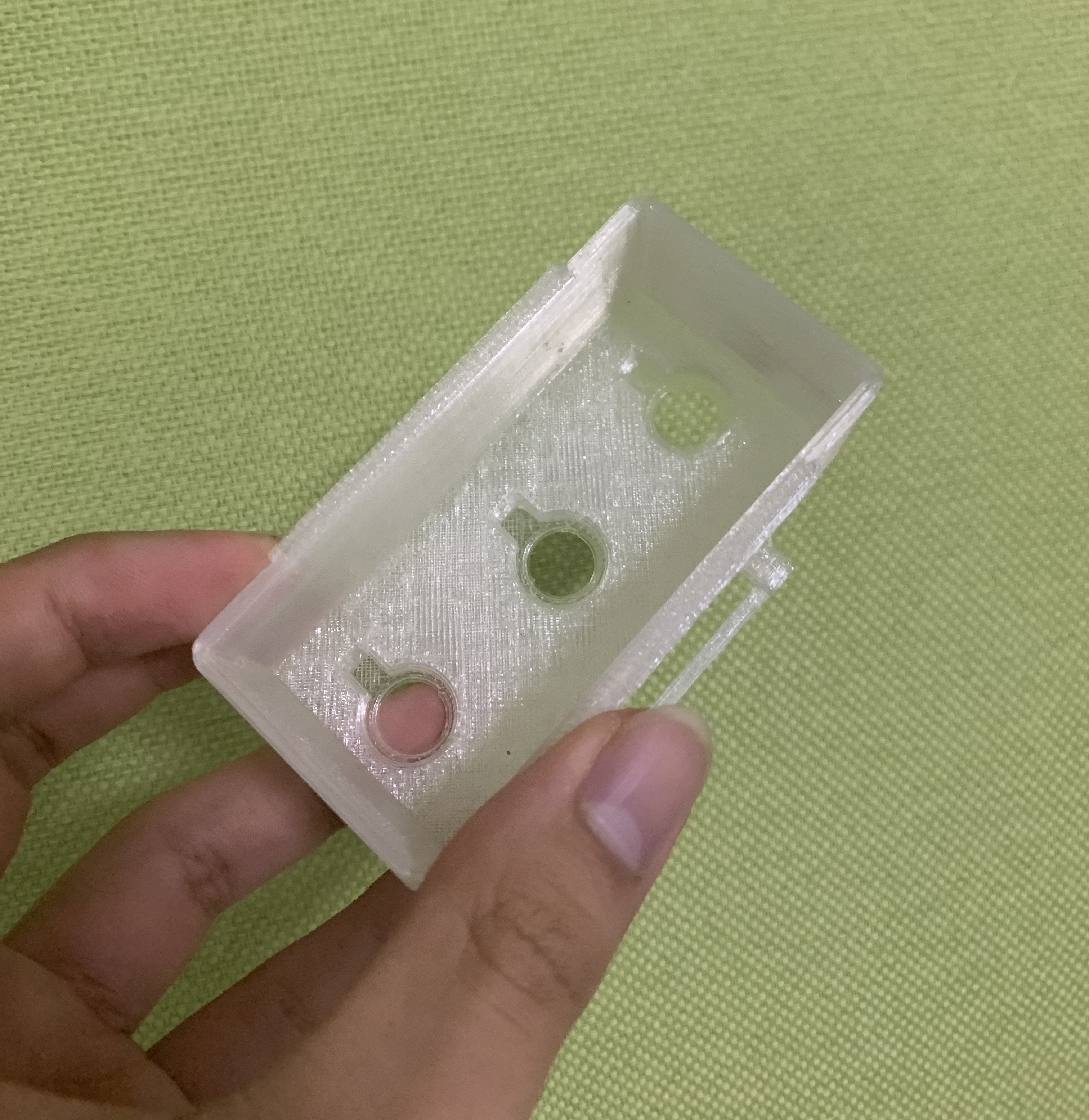
- ボディーを3Dプリンターで作ることで強度と軽量化、カスタム性を安価に両立しました。(1g=8円換算で208円)。カスタム性が高いため様々なニーズに応えることができる他、特定の利用者を対象とした、特注品であっても安価に制作することができます。
- 初めての長いプログラミングはとても大変で一番ここで苦戦しました。先生や友達に手伝ってもらってなんとか完成させることができました。
理想
0最初考えていたのは目的地の座標と自分の座標から角度を出す方法でしたが三角関数の計算と磁気センサーの値を360度に変換するプログラムが上手くいかず別のプログラムを使用することにしました。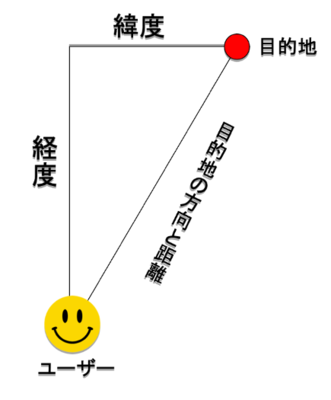
- 試行錯誤した結果行き着いたのがこの方法です。
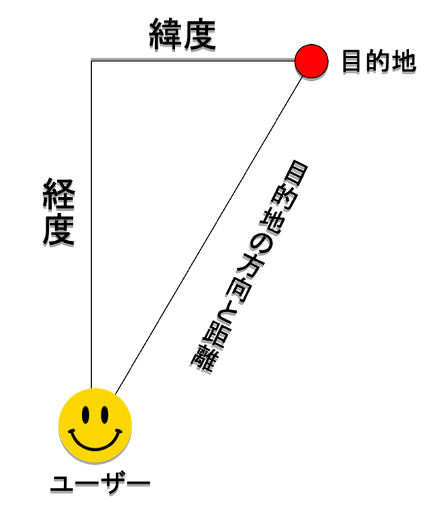
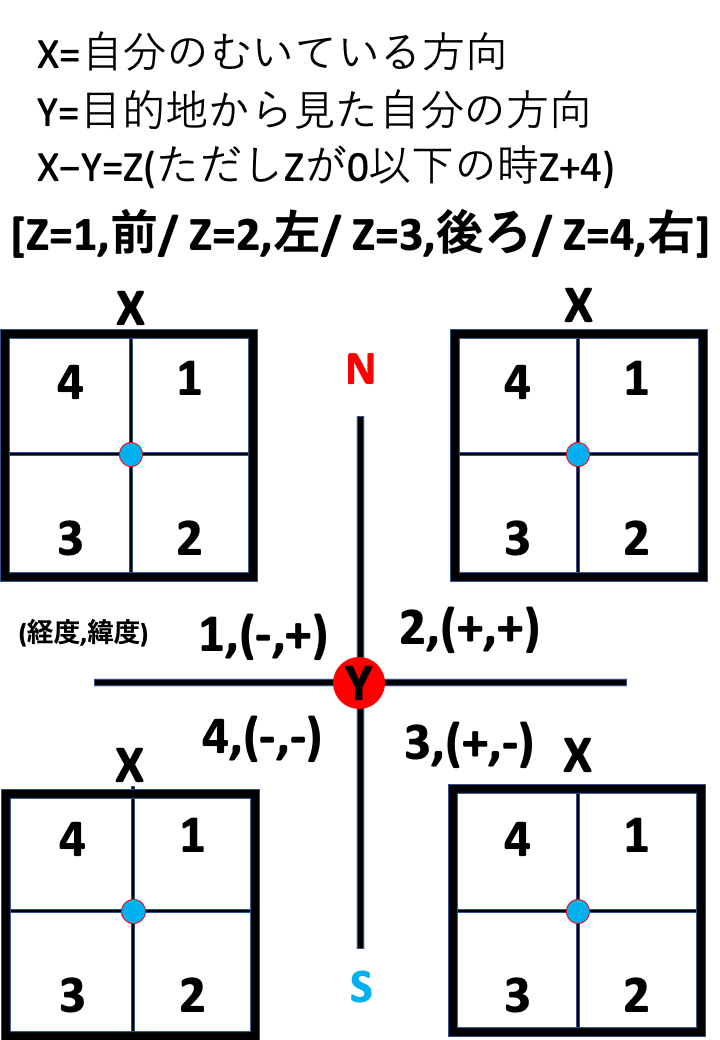
- 自分の座標から目的地の座標を引いてその結果で目的地を中心に4区分([経度、緯度][+,+][+,-][-,+][-,-])し1〜4の値をYとします。そしてYの値に当てはまる地区にXを置きます。
- Xを中心に磁気センサーの値をもとに自分の向いている方向を4区分し、その1〜4の値をXの値とします。
- 「X−Y=Z(ただしZ<0の時Z+4)」とするとZ=1は目的地は前、Z=2は右、Z=3は後ろ、Z=4は左という風に自分から見てどっちの方向に進めばいいかわかります。
これができたときはめちゃくちゃ興奮しました。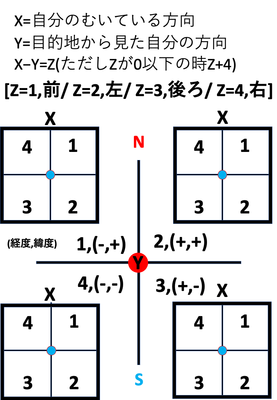
- 自分の座標から目的地の座標を引いてその結果で目的地を中心に4区分([経度、緯度][+,+][+,-][-,+][-,-])し1〜4の値をYとします。そしてYの値に当てはまる地区にXを置きます。
- 目的地の方向は大まかにしか出せませんが最後にあるテスト動画を見てもらえればわかるようにしっかりと目的地の方向を算出できていてとても嬉しかったです。
組み立て
0ついに組み立てです何もなく組み立てられると思いましたが...
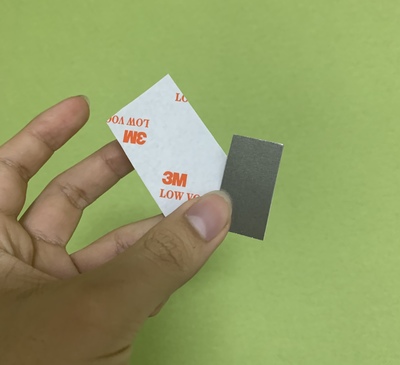
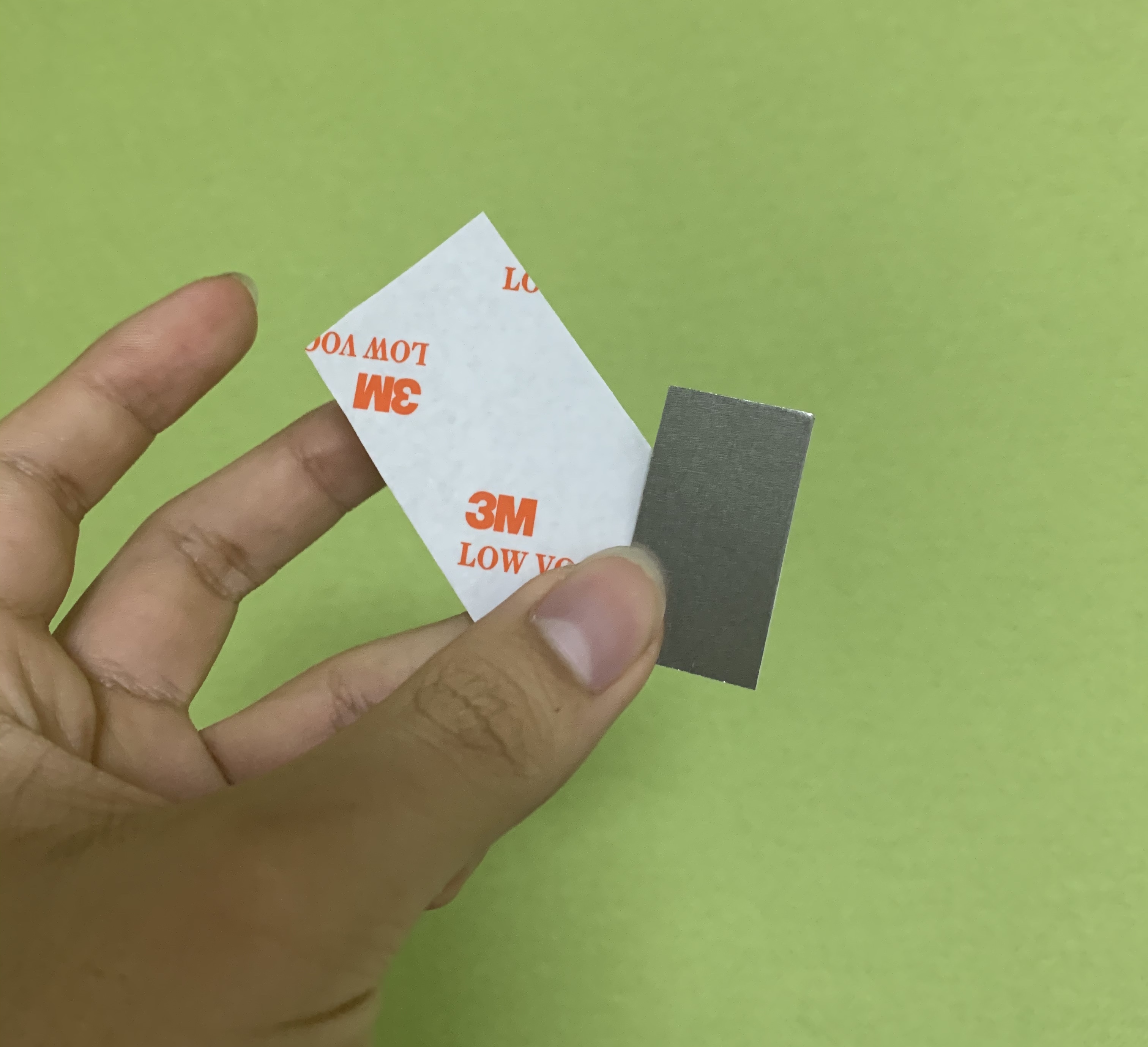
- 組み立てて実際にプログラミングで動かしてみると全然機能しませんでした。理由を調べていくとモーターを動かす時に出る磁気がガッツリ干渉していました。いろいろ調べた結果アルミホイルなども使って見ましたが最終的には3Mさんの低周波ノイズ抑制シート1383という磁気シールドを購入し対処できました。(モーターと基板の間に挟んでください)本当に上手く動かなかった時は軽くテンパりました...
- 単四電池3本の電池BOX 今は汎用性の高いマイコンを使っているため電池多く消費するが将来的には専用のマイコンを作りボタン電池で動かしたい。 また、今回は 目的地の方向や座標の処理などを「ESPr32」に任せているため スマホアプリを作りスマホに処理させればより省エネ化できると思う。


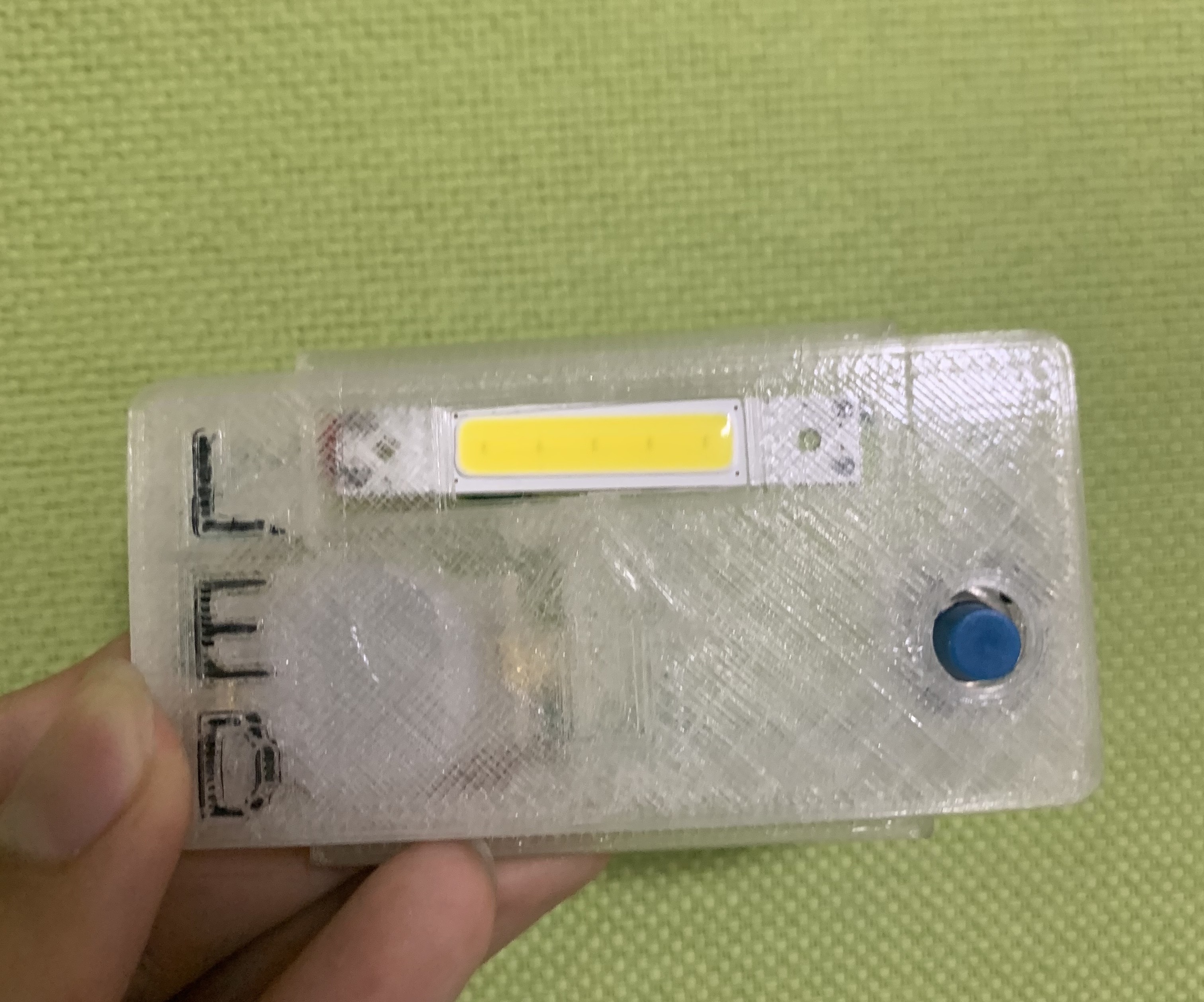
- 振動以外にもわかるように付けている目的地が自分から前方向のとき青、右方行のとき赤、左方向のとき黄と変化して目的地の方向を教える


- 秋月電子通商で購入した振動モーター長時間使用すると発熱するのが欠点。またモーター駆動時に磁気ノイズが生じるためブラシレスでノイズの出にくいリニア駆動アクチュエータに換装予定

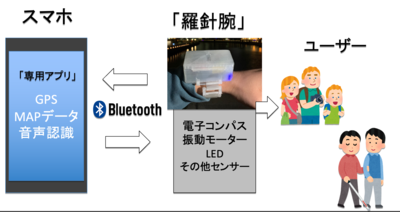
- 僕のプログラミング能力ではアプリを作るレベルには至らずBlynkと言うマイコンとスマホを通信するアプリを使っている。 スマホのGPSを使うことでデバイス自体にGPSを入れなくても良いため安価に製造出来る。本格的にアプリを作る際は様々な人に使っていただけるように他言語対応と目的地を音声認識で決められたりできるようにしたい。また、ジェスチャーでモードを切り替えたりを行っていけるといいと思う。


これから
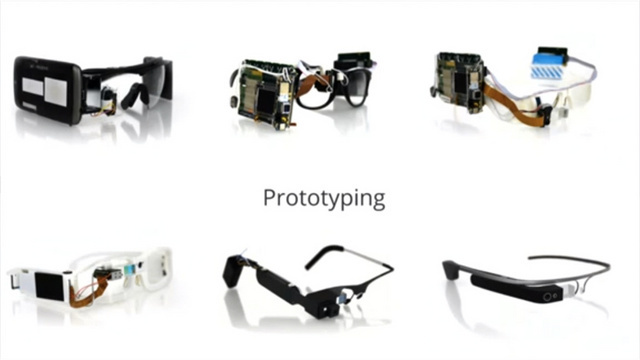
0今回作成した羅針腕はまだプロトタイプです。小型化はできず腕につけるには大きく重いし(初期のグーグルグラス?)まだ四方向でしか判断できないので制度もあまり高くありません、しかも目的地は固定で拡張モジュールはLEDの懐中電灯モジュールだけです。ですが将来的には小型化と高制度化はもちろん心電図センサー、マルチツールモジュールなど、たくさんの拡張モジュールやソフト面では専用アプリで目的地設定やジェスチャーで目的地を交番に変更したり他の人のスマホのGPSを登録して目的地にすることではぐれた人を探したりもっと役に立てるデバイスにしていこうと思います。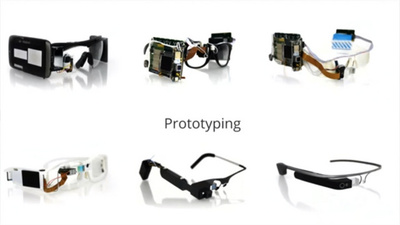
拡張案
0- ジャイロセンサーと加速度センサーでジェスチャー操作
- 筋電センサーで指の動きを読み取って手話翻訳
- ビーコン設置で室内もナビゲート
最後に
0今回まだプロトタイプですが作って本当に良かったと思っています。去年の自分と比べて見て手に入れた技術力は数え切れないほどあり今も新しいものづくりのアイデアが尽きません。この一年を通して気付いたものづくりの楽しさは自分の人生で大きな起点になると思います。- 日本政策金融公庫様が主催する高校生ビジネスプラングランプリに置いて3808組中上位100位に選ばれ表彰を受けました!















References


Project comments

Comments