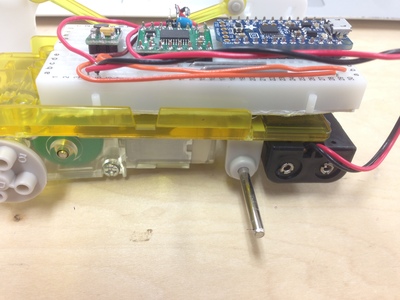
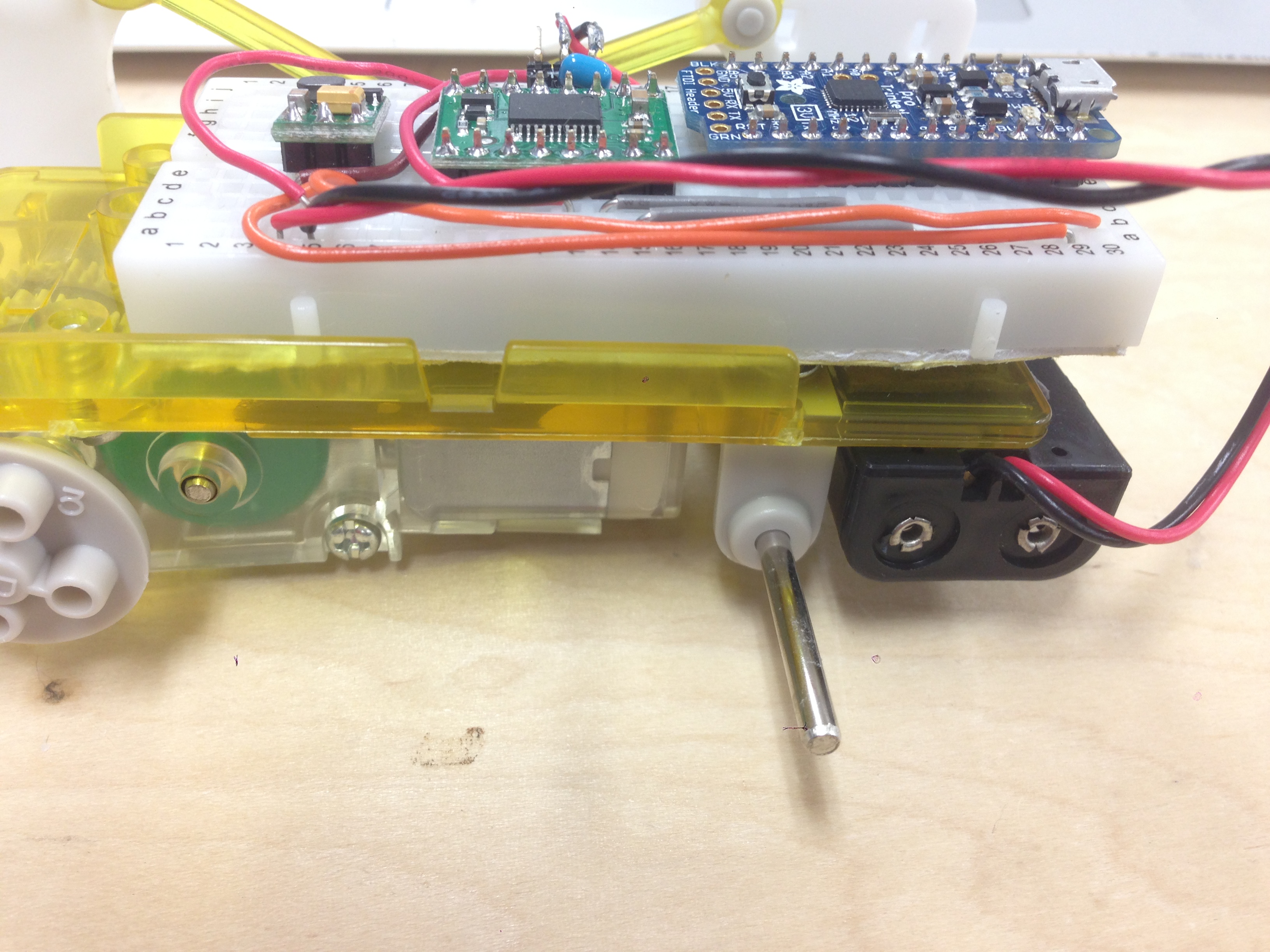
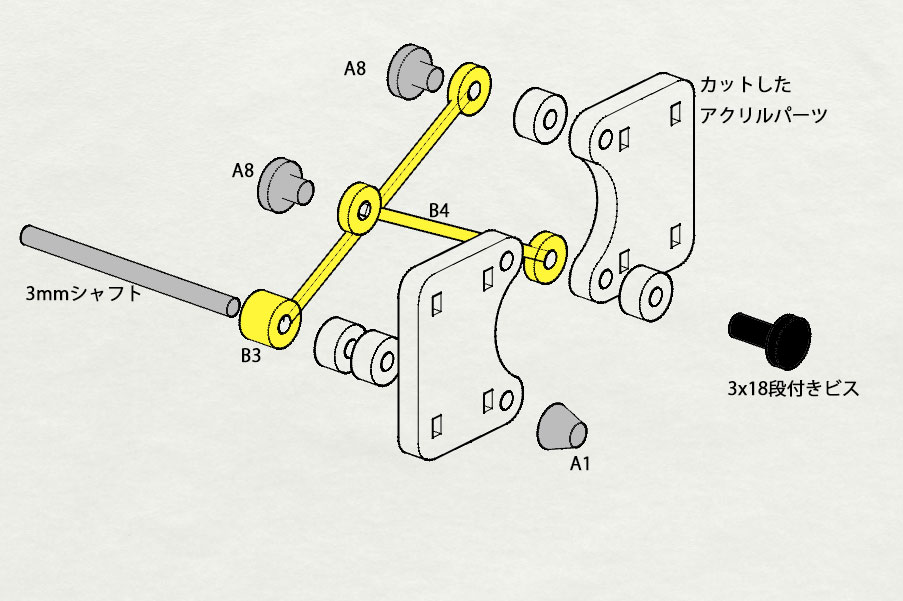
Assemble the Tamiya Robo Craft Series Mechanical Giraffe by following the instructions No. 3, 4, 5, 7.
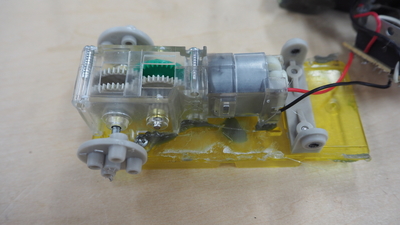
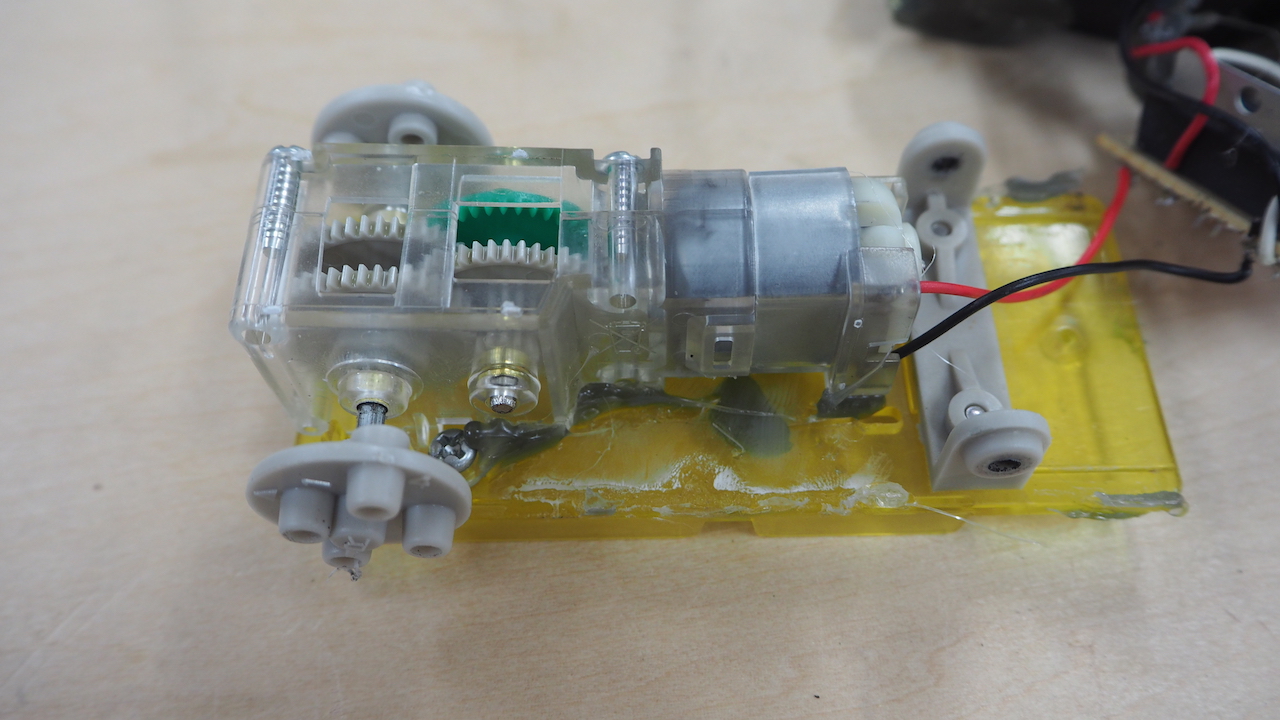
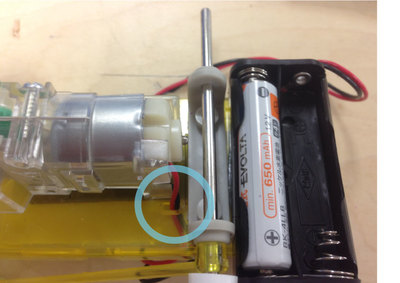
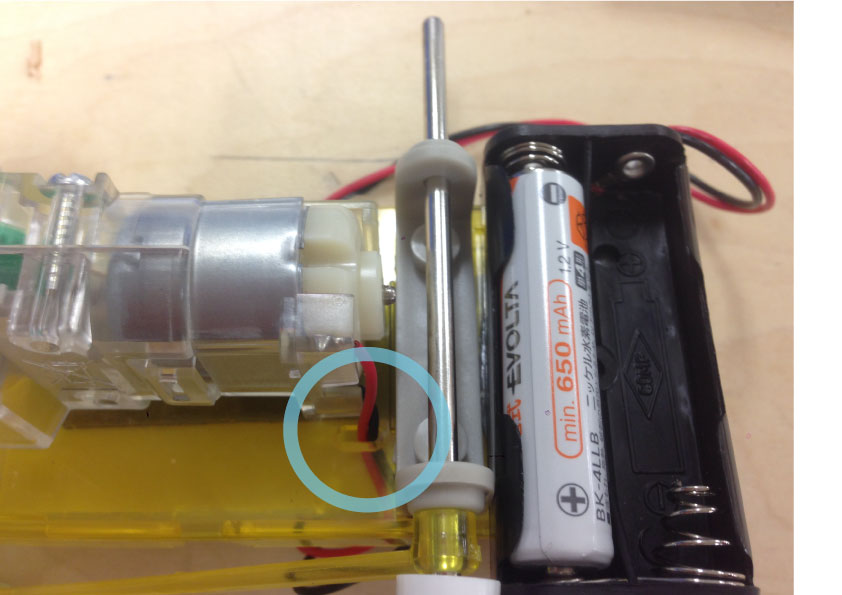
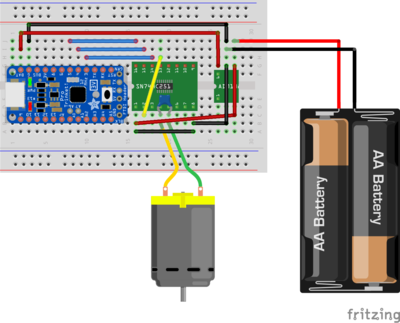
- Once the gear is assembled, turn it to check that it moves smoothly and insert the motor. Press each of the motor's wires on the ends of a AA battery to check if the gear moves. (At this point, the battery’s polarity does not matter.)




Comments