
サーボの制御
posted by  ohwada on June 06, 2016
ohwada on June 06, 2016
ohwada on June 06, 2016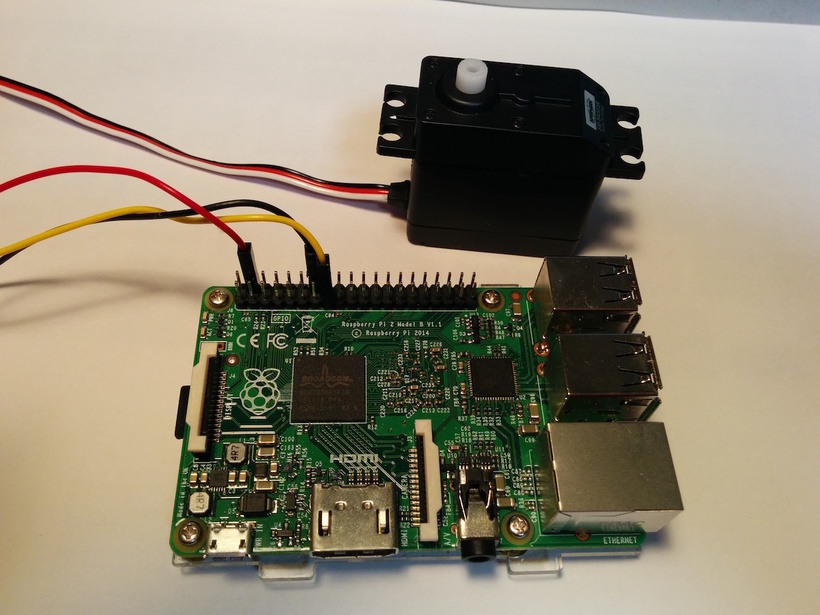
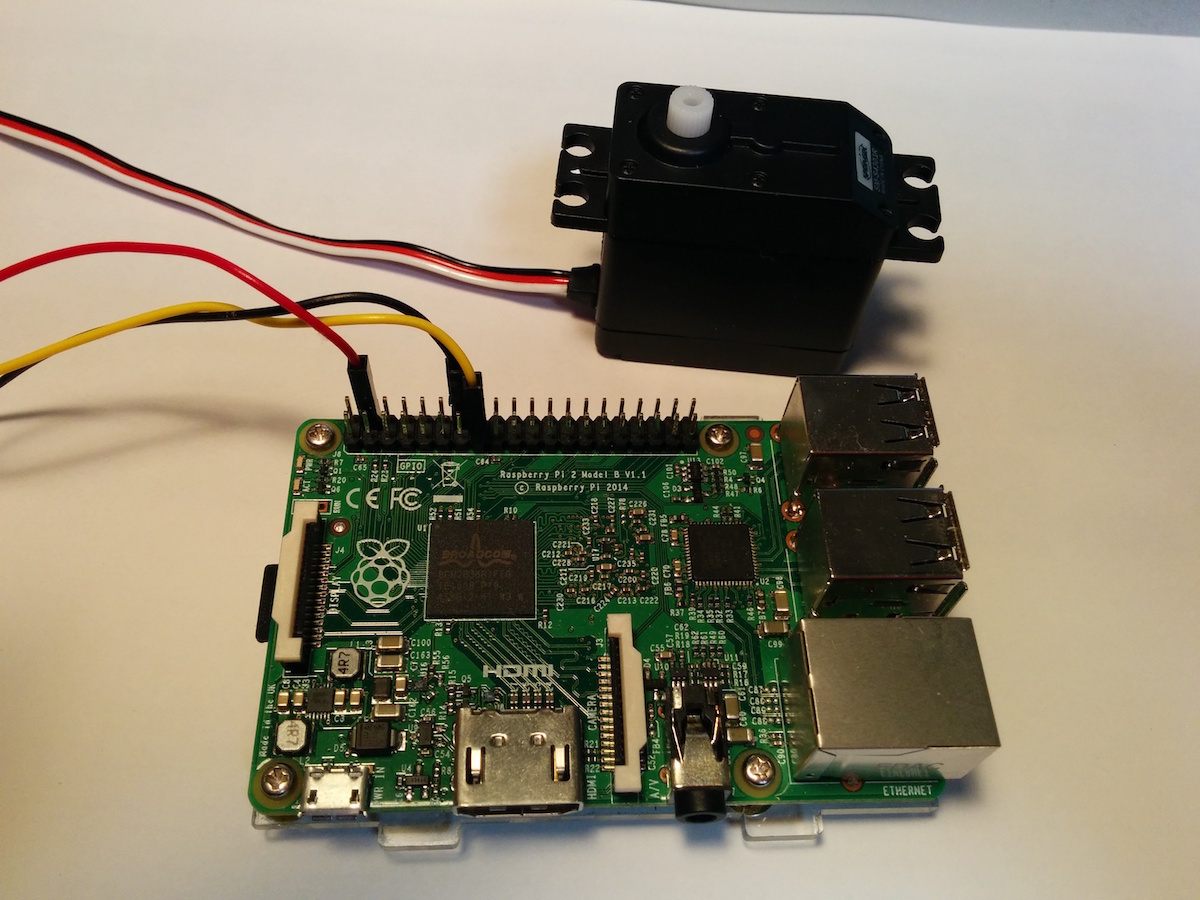
サーボには3本の信号線があります。
赤は Pin4 (+5v)、黒は Pin6 (GND)、白は Pin32 (GPIO12)に接続します。連続回転サーボ に必要な制御信号は、周期 20ms、パルス幅 1.5±0.5ms です。
RPi.GPIO の PWM の設定
- GPIO.PWM(channel, freq)
周波数 freq は、周期 20ms なので、50 Hz です。
- p.start(dc)
デューティ比 dc は、1.5ms / 20ms なので、7.5 % です。
- RPI Servo Duty
- RPI Servo Speed
結果
duty 7.5 では微速で回転して、停止しませんでした。
オシロで測定したところ、パルス幅は 1.6ms くらいでした。
duty 7.2 くらいで、停止し、パルス幅は 1.5ms でした。
しかし、若干の ジッター が見られました。
注意
DC電源は2A出力のものを使ってください。
出力が小さいものは、サーボが動作すると、ラズパイがフリーズすることがあります。