

FabQuestへの参加が決まったとき、私たちは「鎌倉」という地名から、観光地としてのイメージしか持っていませんでした。
観光客が多い場所だから、何か便利なものを作れるのでは?と考え、アイデアを出していました。
観光客が多い場所だから、何か便利なものを作れるのでは?と考え、アイデアを出していました。
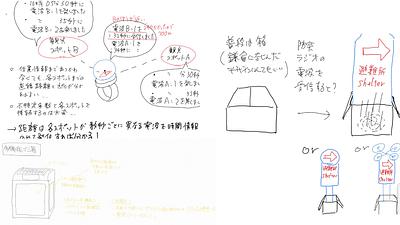
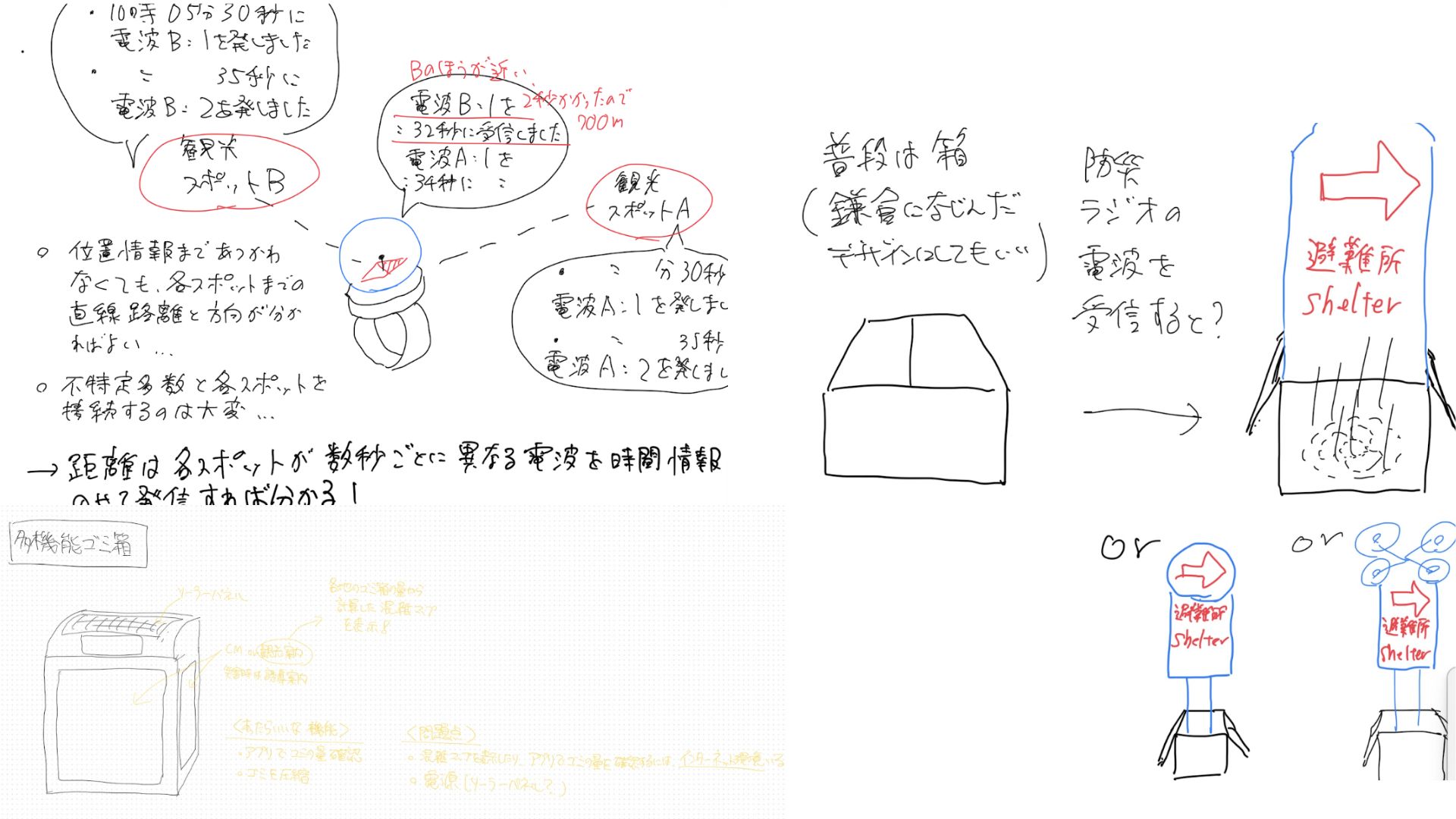
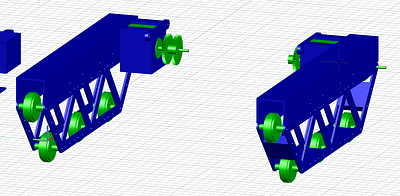
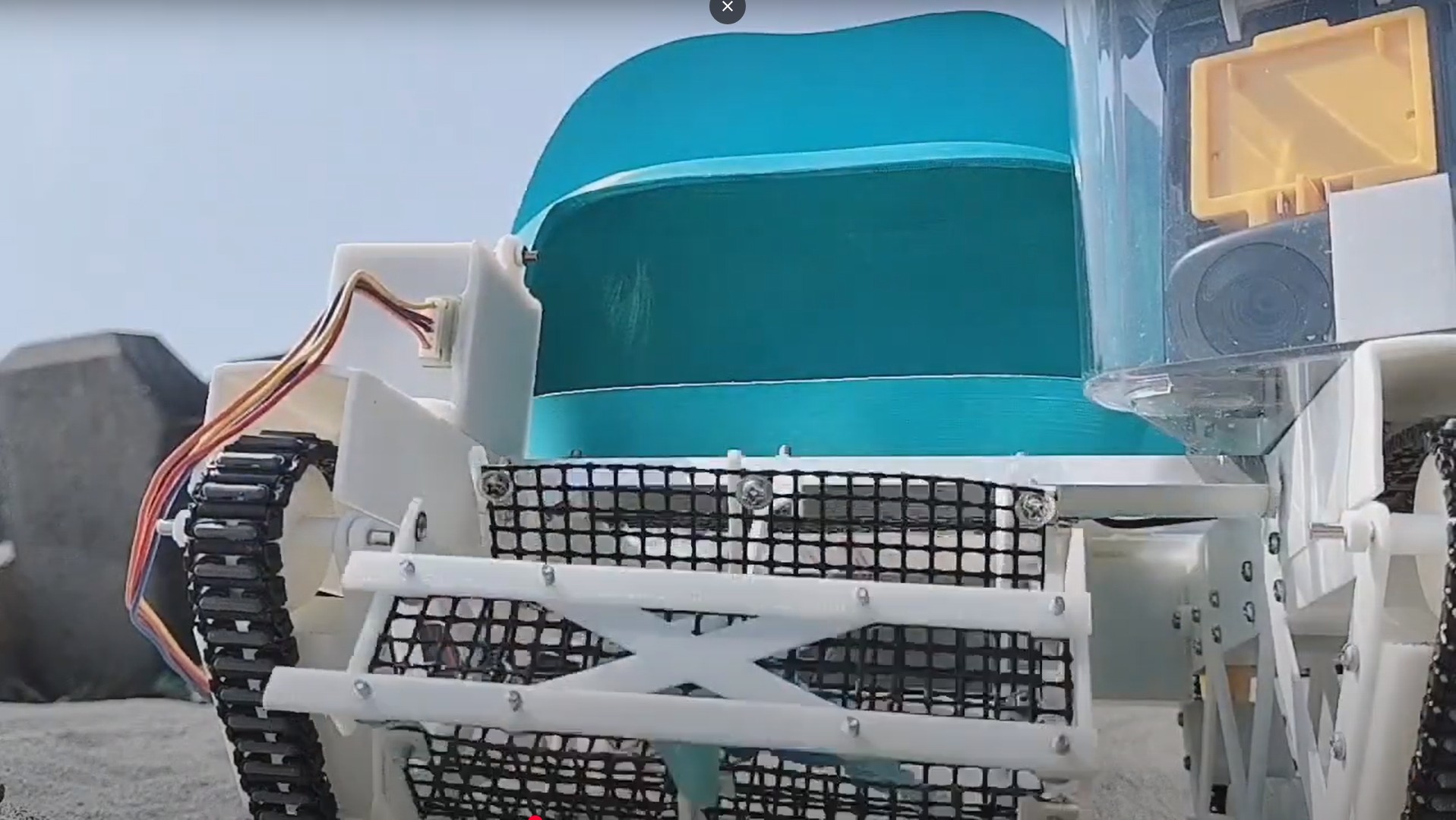
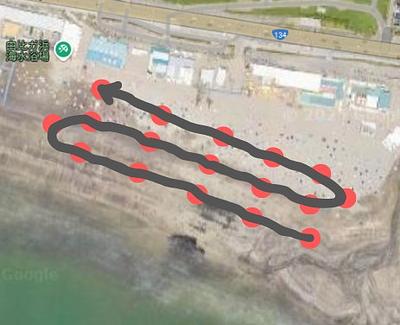
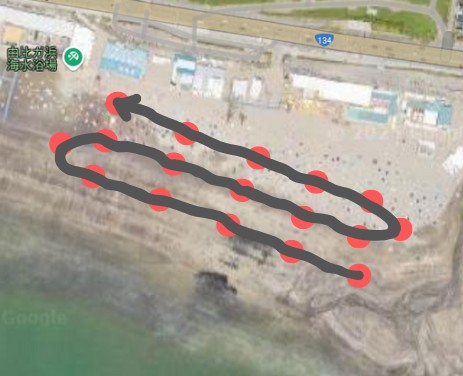
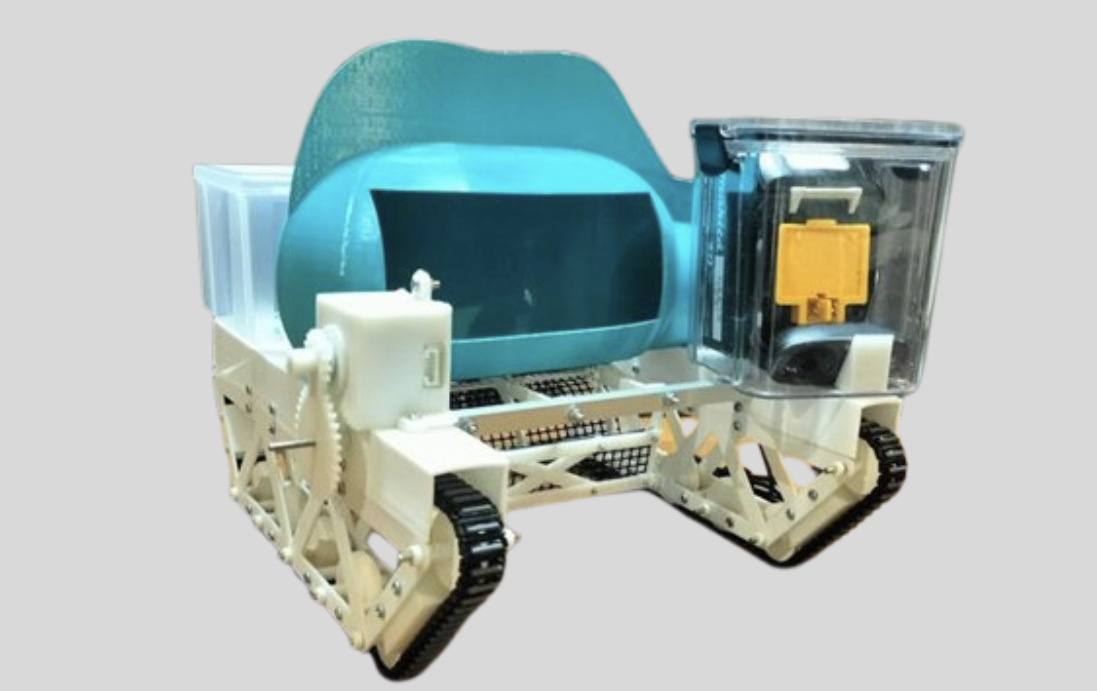
- ・移動ゴミ回収ロボット・海岸のごみを拾うヤドカリロボット・災害時の避難誘導・観光案内腕時計
- この初期案をもって、高専(在籍校)内の先生方に意見を聞きに行ったこともありました。高専には、様々な分野の専門教員がいるため、それぞれ違った視点で、私たちのアイデアに意見をくださいました。しかし、この時点では、メンバー同士の興味関心が一致せず、取り組む課題を決めかねていました。


























Comments