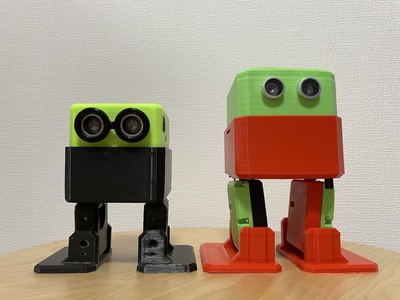
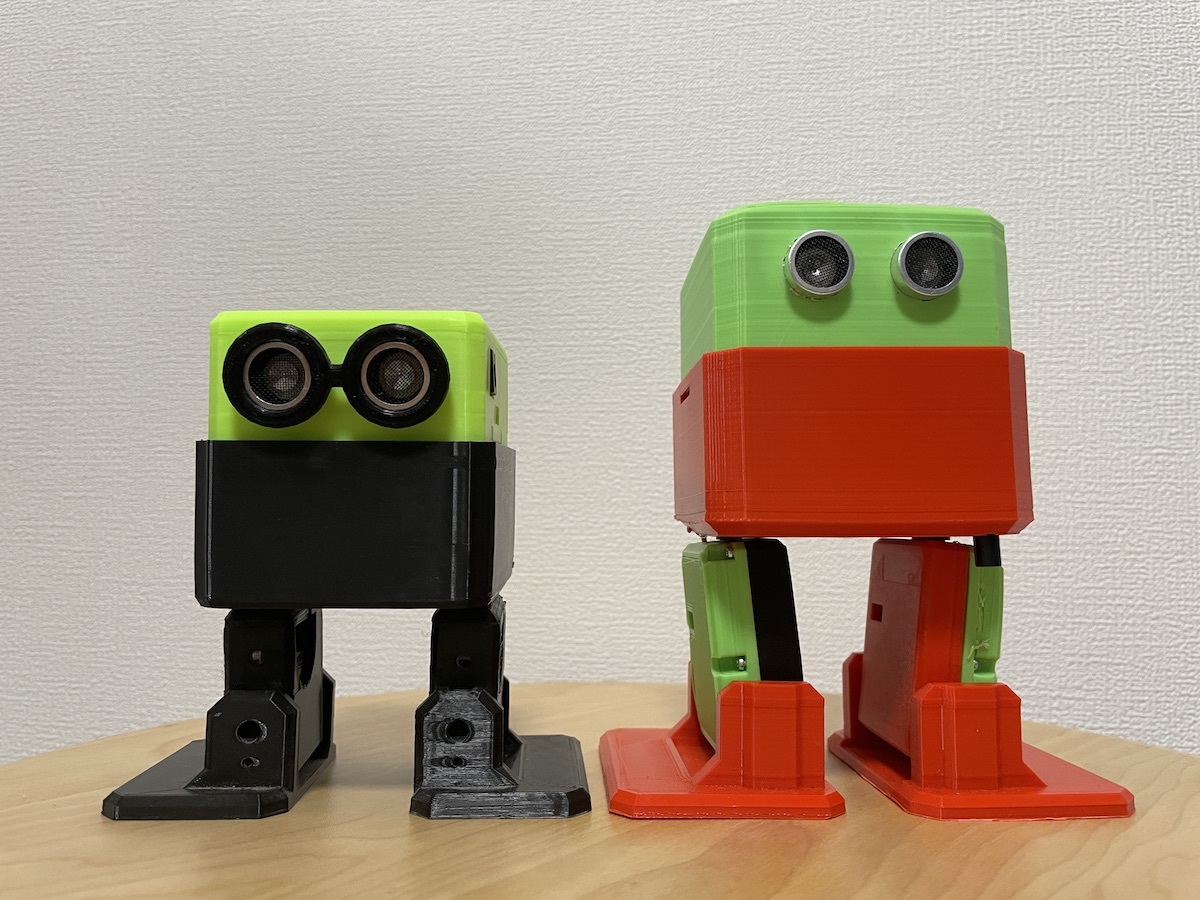
OTTOは、チェコで開発されたオープンソースのロボットです。
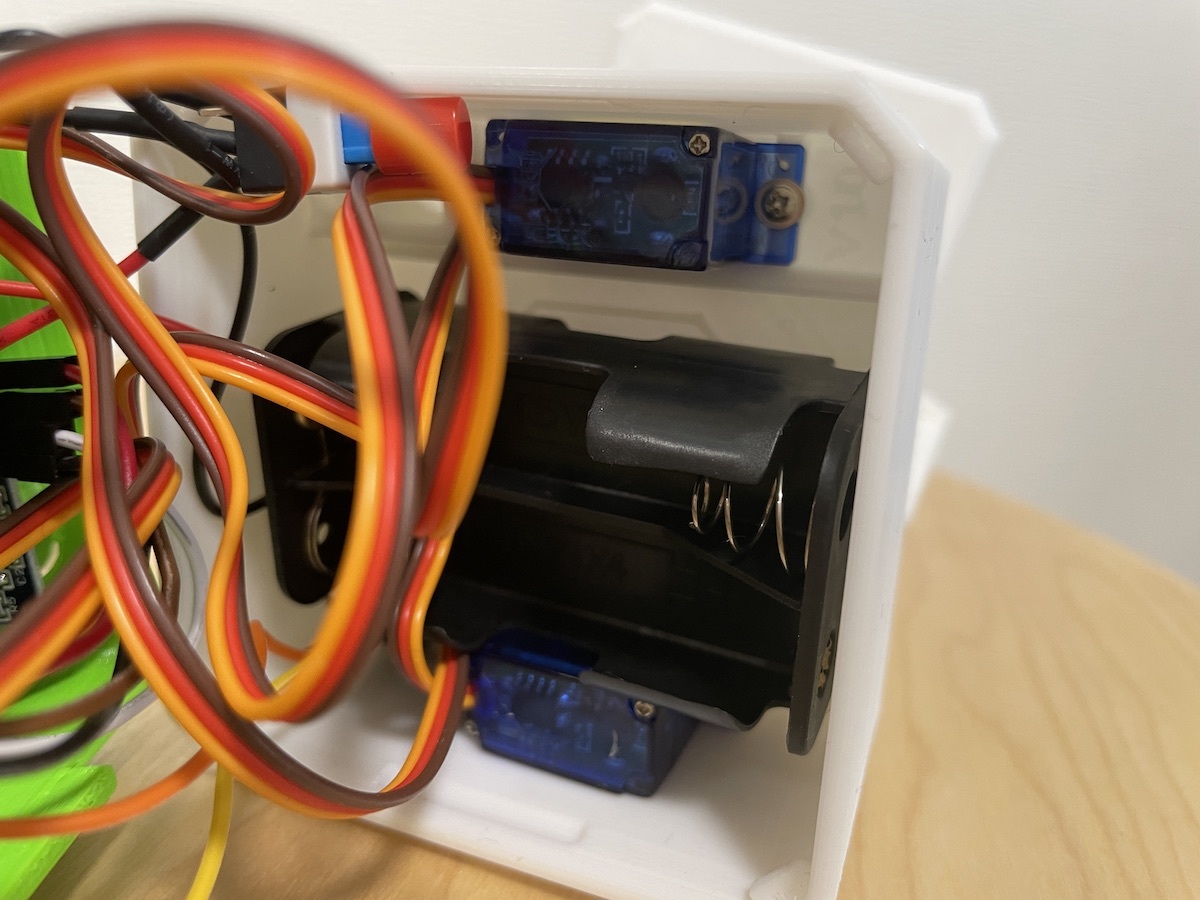
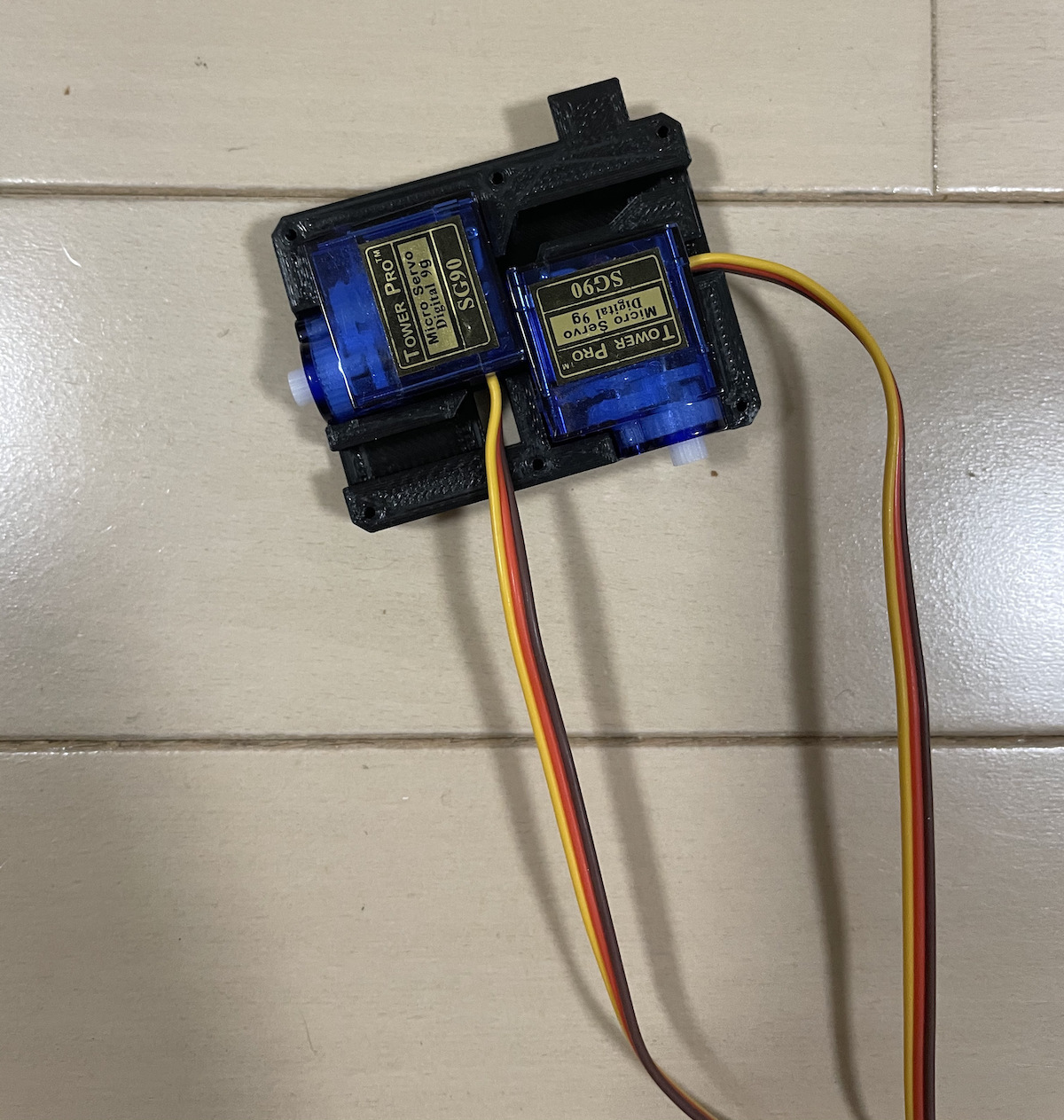
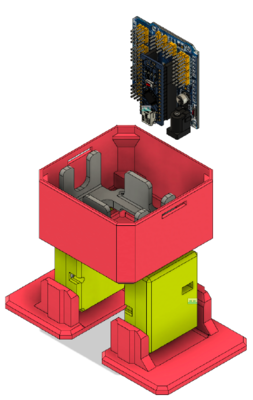
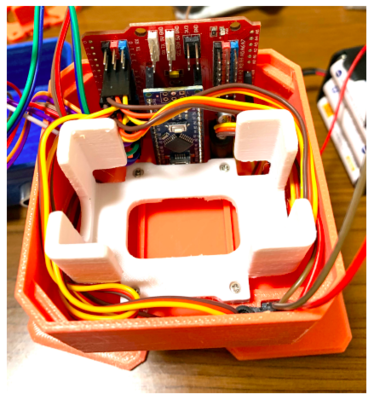
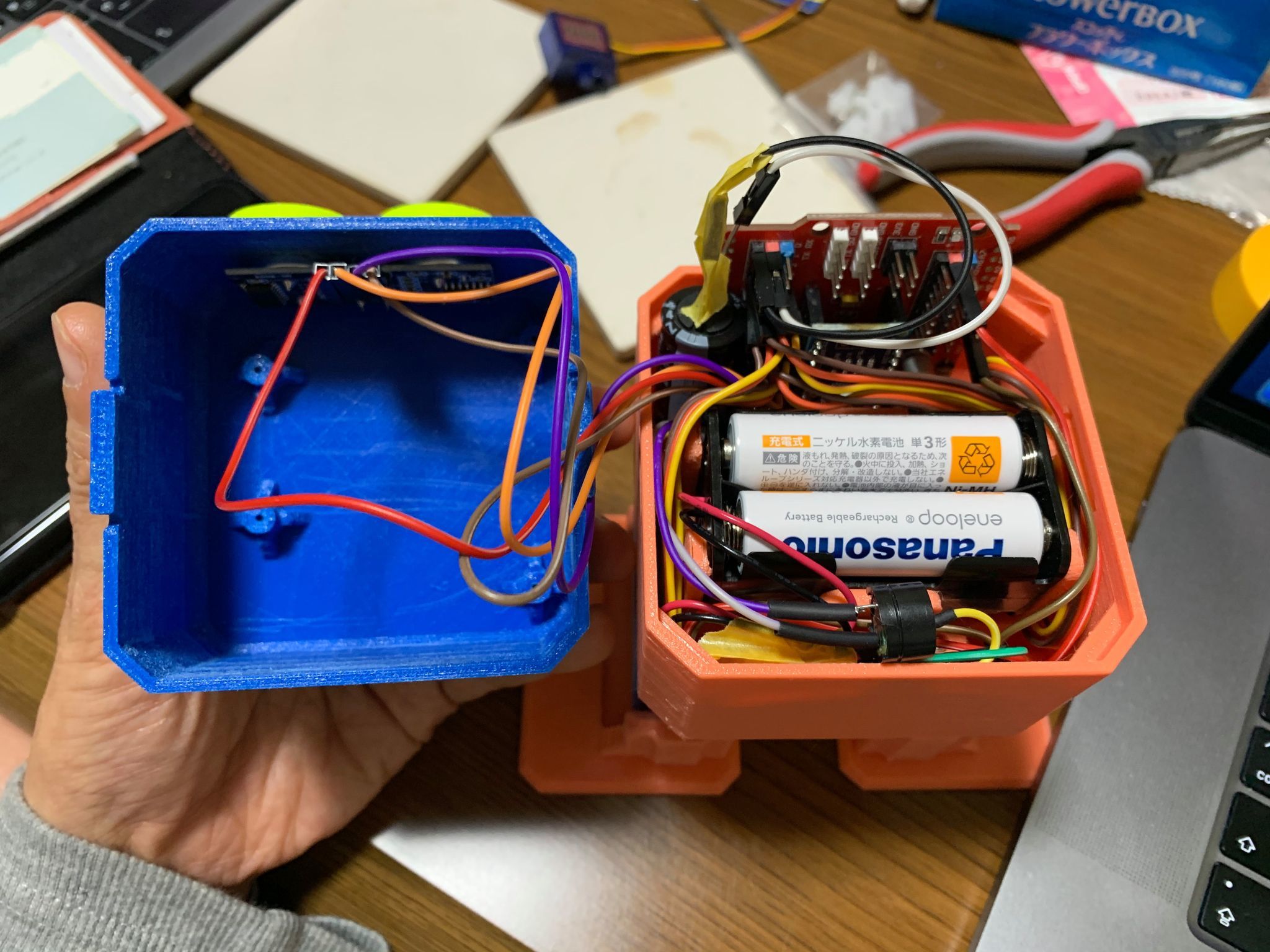
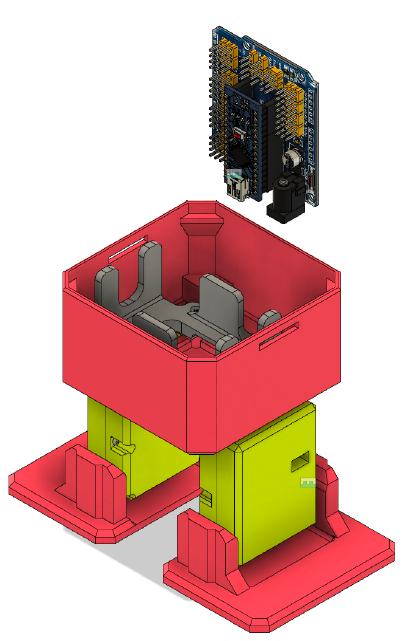
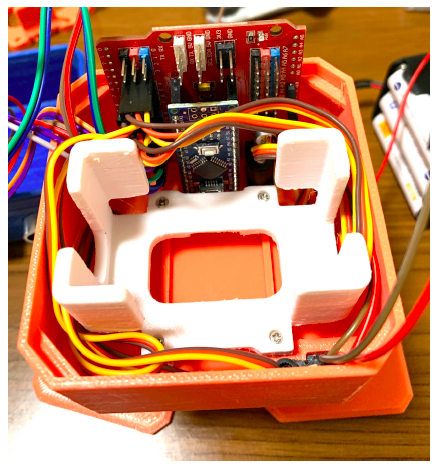
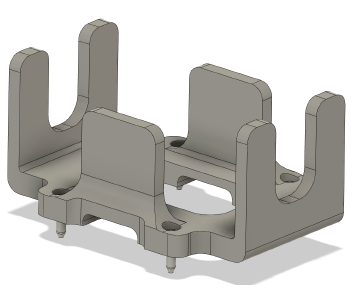
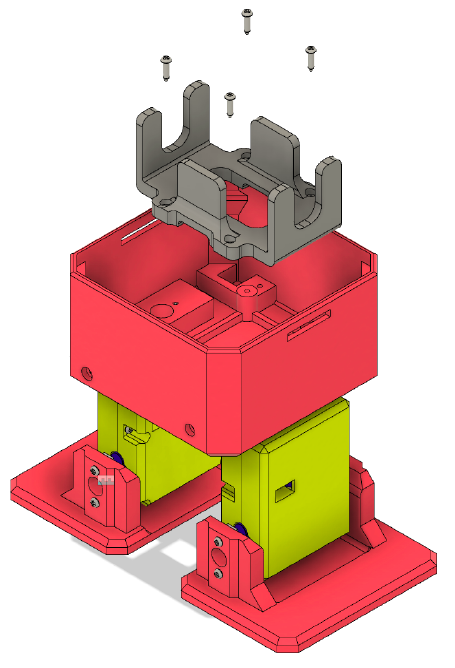
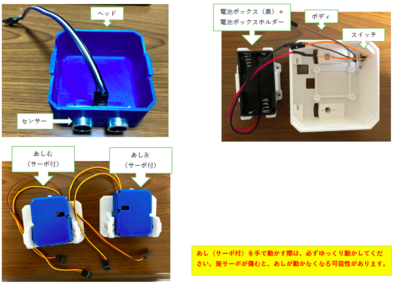
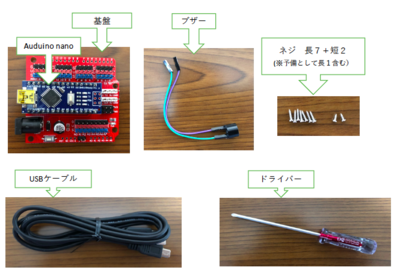
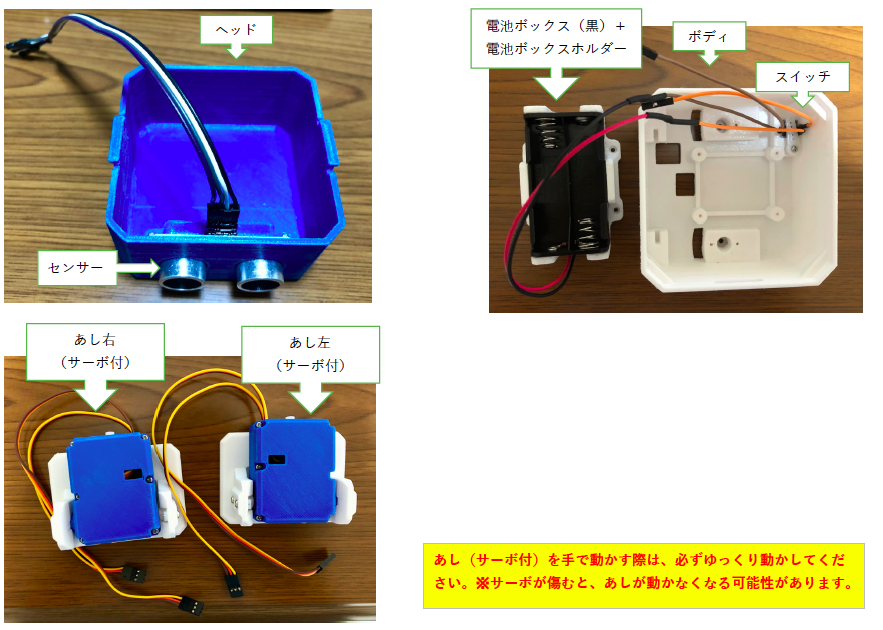
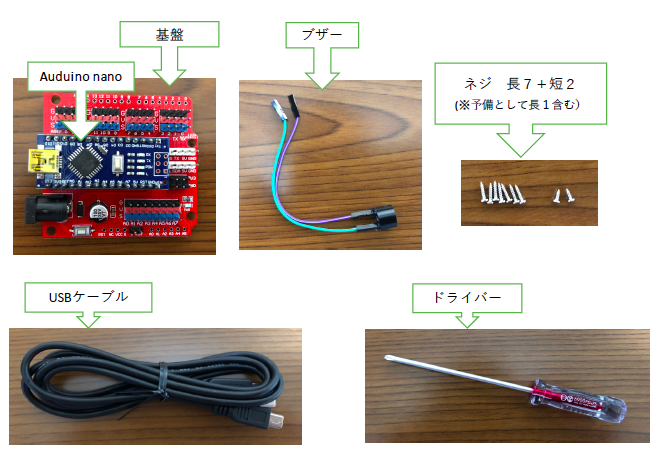
3Dプリントで製作可能な本体、Arduino Nanoをベースとした、ラジコンサーボ、ブザー、超音波センサ等の電気回路を搭載しています。専用のブロックプログラムプラットフォームも準備されており、教育用に利用可能と考えました。
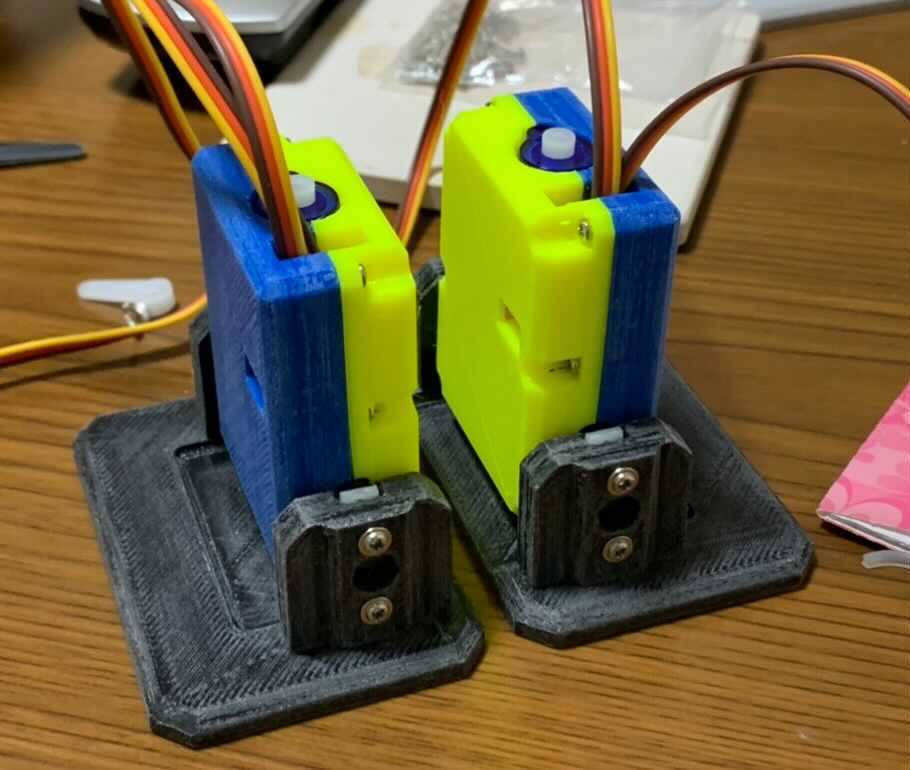
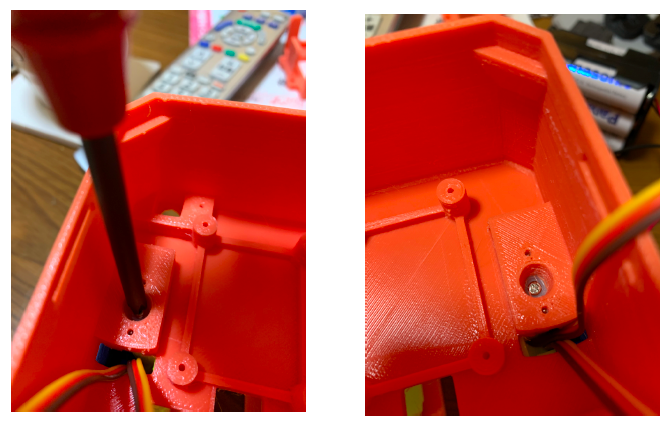
しかし、子供向けを想定すると、組み立て難易度が少し高いところに課題があるため、改良版を新たにFabLab西播磨で開発しました。本キットは、兵庫県豊岡市市民課殿および豊岡市工業会殿と共に開催した子供向けワークショップの中で実際に使用しました。(コロナ禍につきリモート開催。)
https://fablab-nishiharima.org 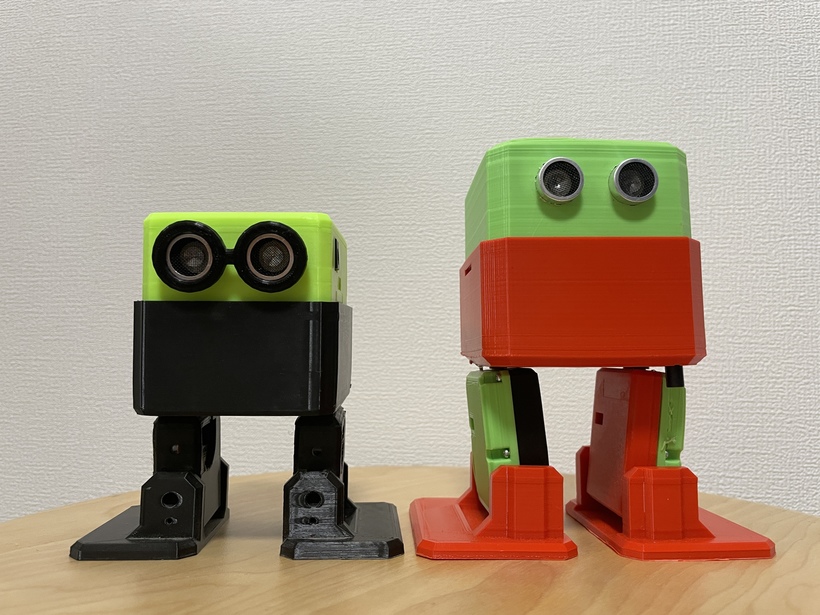














Comments