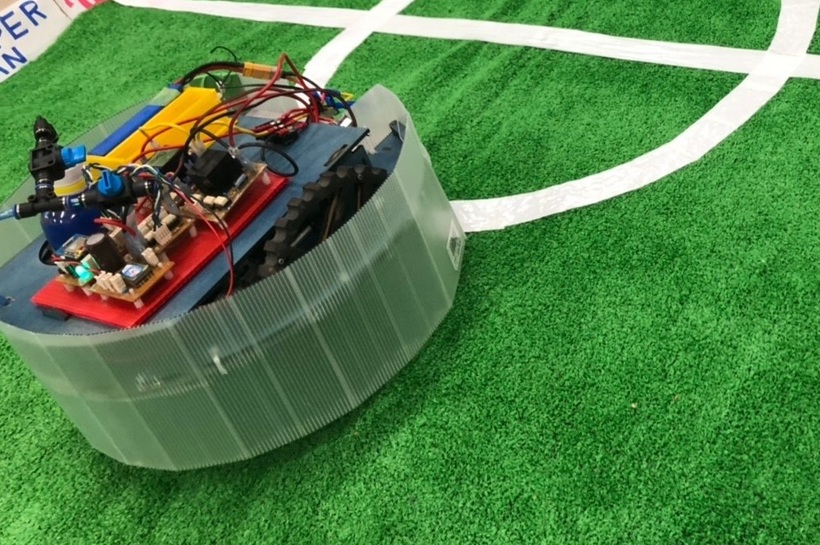
今回は高専にあるものとホームセンター、100円ショップで買えるもので制作しました。
サッカーロボット(高専祭)
Owner & Collaborators
License

Summary
ロボットでサッカーを行うロボカップ。これは世界大会が行われるほど人気がある競技です。今回は、5日ほどで作れてサッカーができるロボットを紹介します。
Materials
Tools
Blueprints
Making
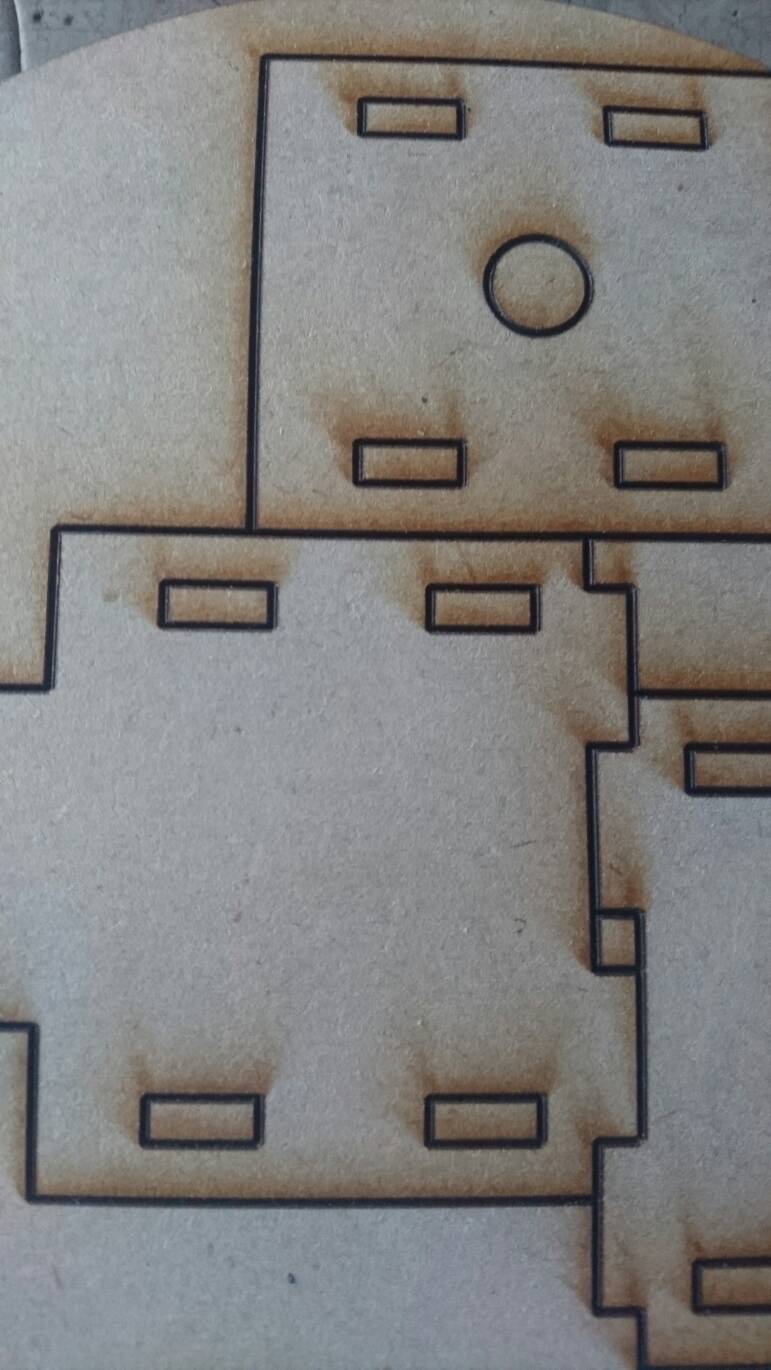
設計
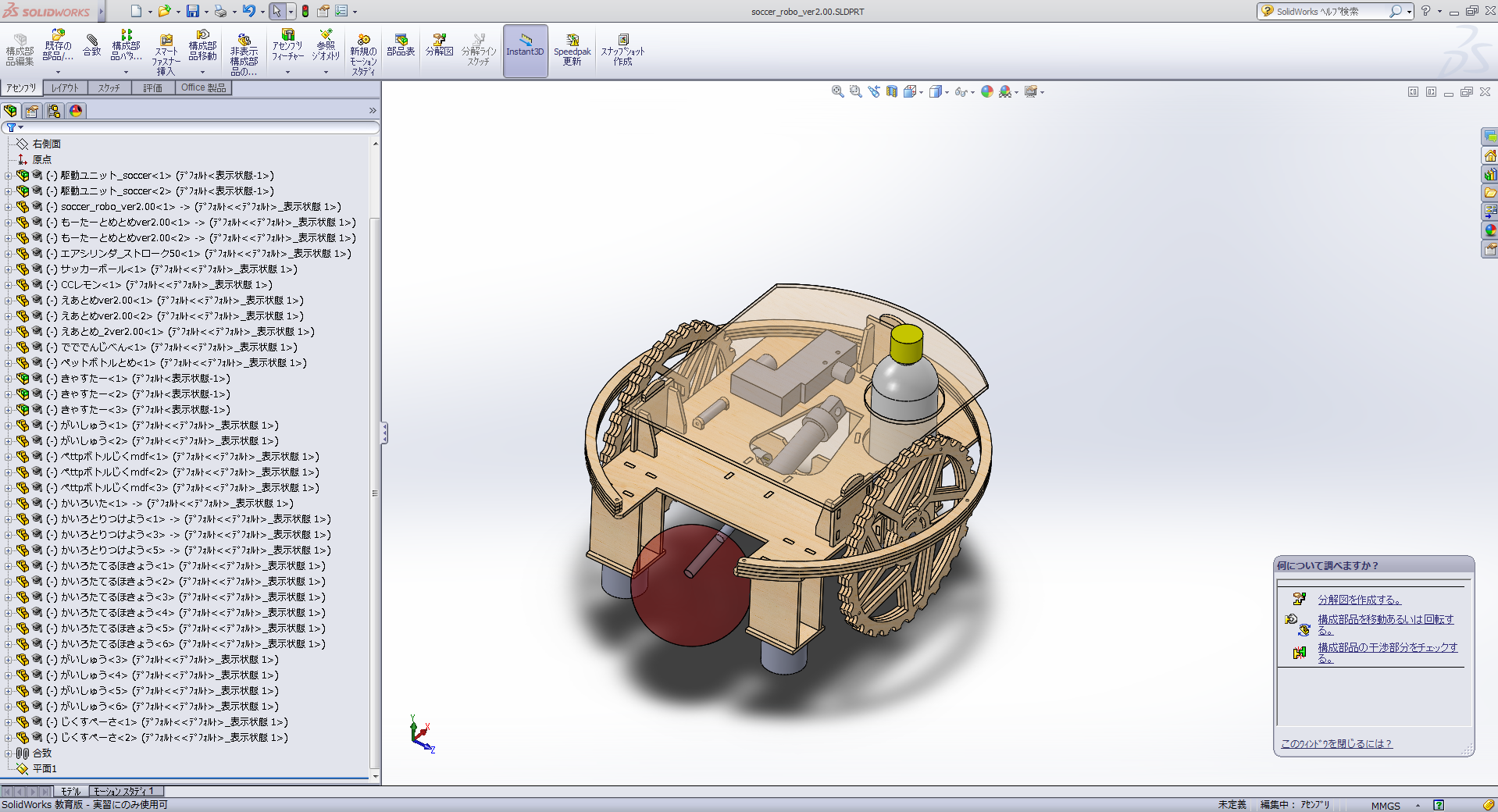
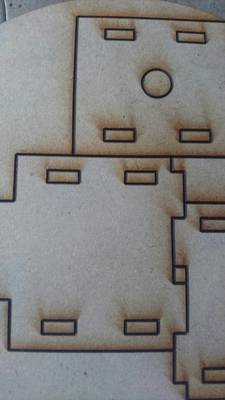
0 SOLIDWORKS2013を使用し、設計を進めていきます。モータは仕様書を参考に設計しましたが、その他の既製品はさほど精度が悪くても問題ないので実測で設計しました。ロボットの形が円形になるようにモータなどを配置し、それらを補強するためのリブなどを取り付け接合用の穴や出っ張りをmdfの部品に施します。モータ同士などの干渉がないことを確認し、レーザーカッターで加工する部品をdxf形式で保存し、設計は完了です。
SOLIDWORKS2013を使用し、設計を進めていきます。モータは仕様書を参考に設計しましたが、その他の既製品はさほど精度が悪くても問題ないので実測で設計しました。ロボットの形が円形になるようにモータなどを配置し、それらを補強するためのリブなどを取り付け接合用の穴や出っ張りをmdfの部品に施します。モータ同士などの干渉がないことを確認し、レーザーカッターで加工する部品をdxf形式で保存し、設計は完了です。
組み立て
0組み立てには多少順序があります。順序を間違えると1度分解したりしないといけなくなるので気を付けましょう。mdf同士の接合は木工用ボンドで行います。1.メインの大きな板に色々取り付ける。2.モータとタイヤを取り付ける。3.外側にバンパーを取り付ける。4.配管を行う。(エアシリンダ、ソレノイドバルブ、ペットボトル)- 今回はLazurite920Jを用いて制御しました。コントローラ側に親機、ロボット側に子機を載せて通信を行い、操作できるようにしました。コントローラはdualshock2を改造したものを使用しました。
動作確認
0前進、後退、旋回、シュートができることを確認します。サッカーで使用するボールは摩擦係数の低いものを採用したほうがいいです。摩擦係数が高いとドリブルの際にボールをロボットが乗り越えることがあります。



References
Usages
Project comments

Comments