

このカテゴリのポイントは、
身近でIoTとファブを絡めながら、利用者の笑顔を誘うというものである。
- IoTの使い方
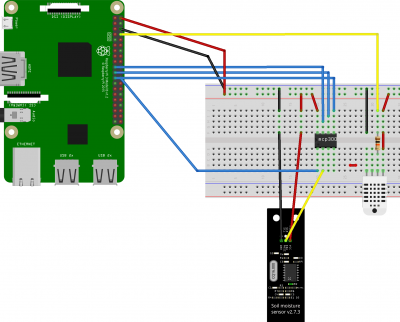
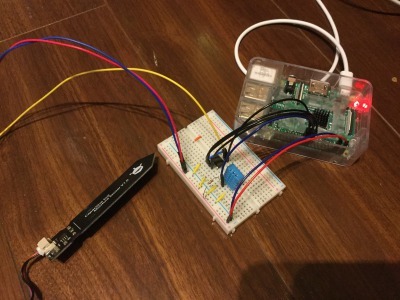
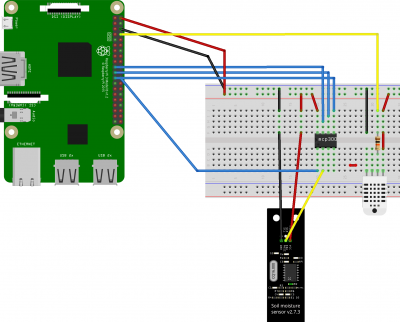
- デバイスやセンサーの情報をインターネット経由で活用
- インターフェースからインターネット経由でデバイスを操作
ファブ(Fabrication: 製造、組み立てという意味)の使い方- センサーや操作できるインターフェースを搭載し、その情報を送る
- デバイス自体に稼働部などを搭載し、それをIoTで動かす
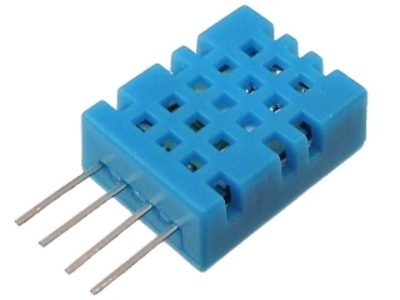
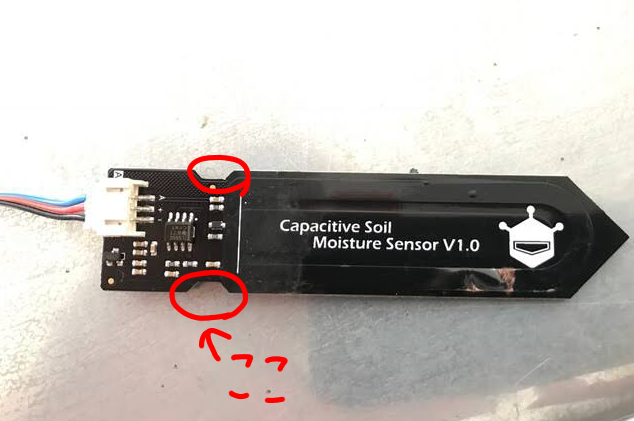
センサー ➡︎ 温度センサー、人感センサーなど - デバイスやセンサーの情報をインターネット経由で活用
- このカテゴリーのテーマは「笑顔を誘う」笑顔にはどういうものがあるのか?
- 滑稽で笑う。ウケる。
- かわいらしい様子でほっこりする。癒される。
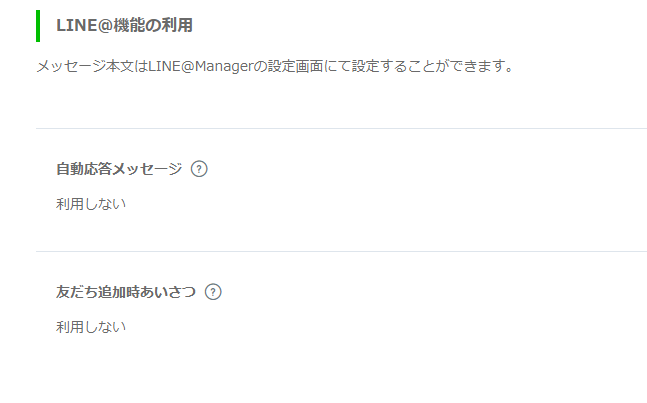
FABで笑顔を誘うとなると高度なモデリングや笑いのセンスがないといけない...→IoTで笑顔を誘う!!例えばユーザにメッセージを送って喜ばせる的な... 結論
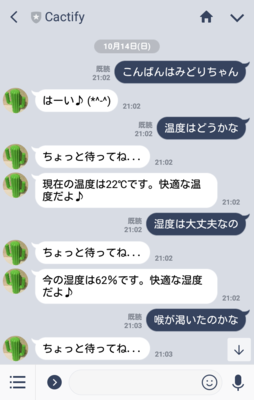
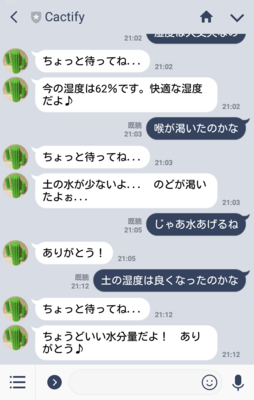
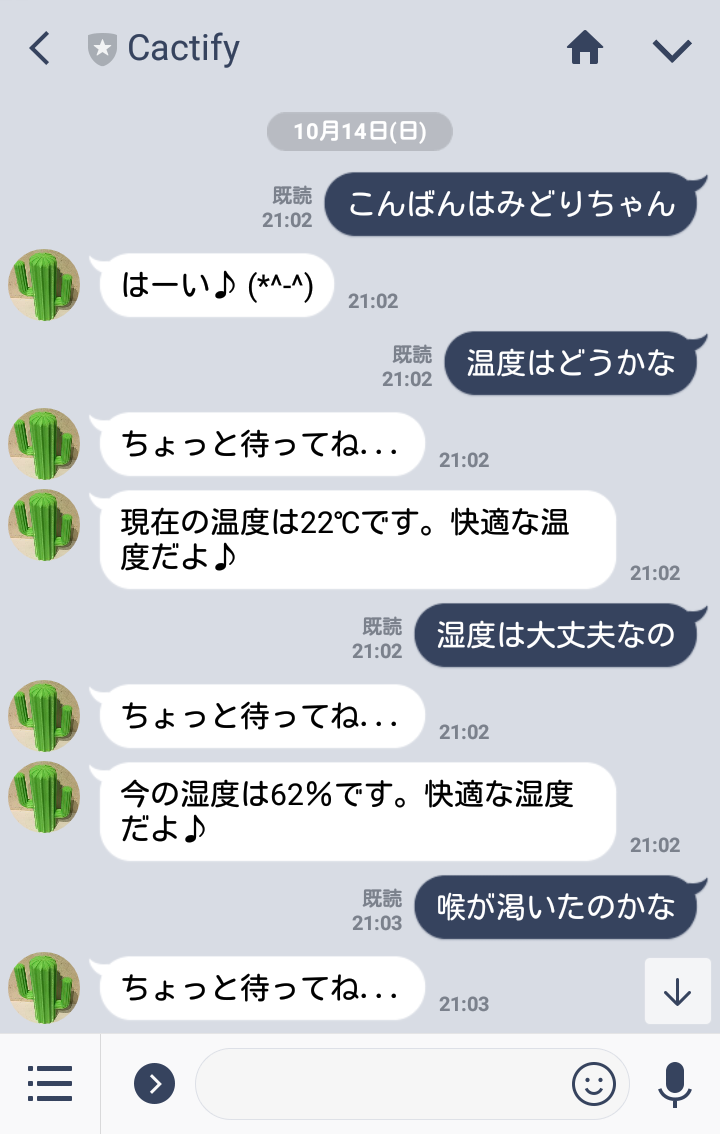
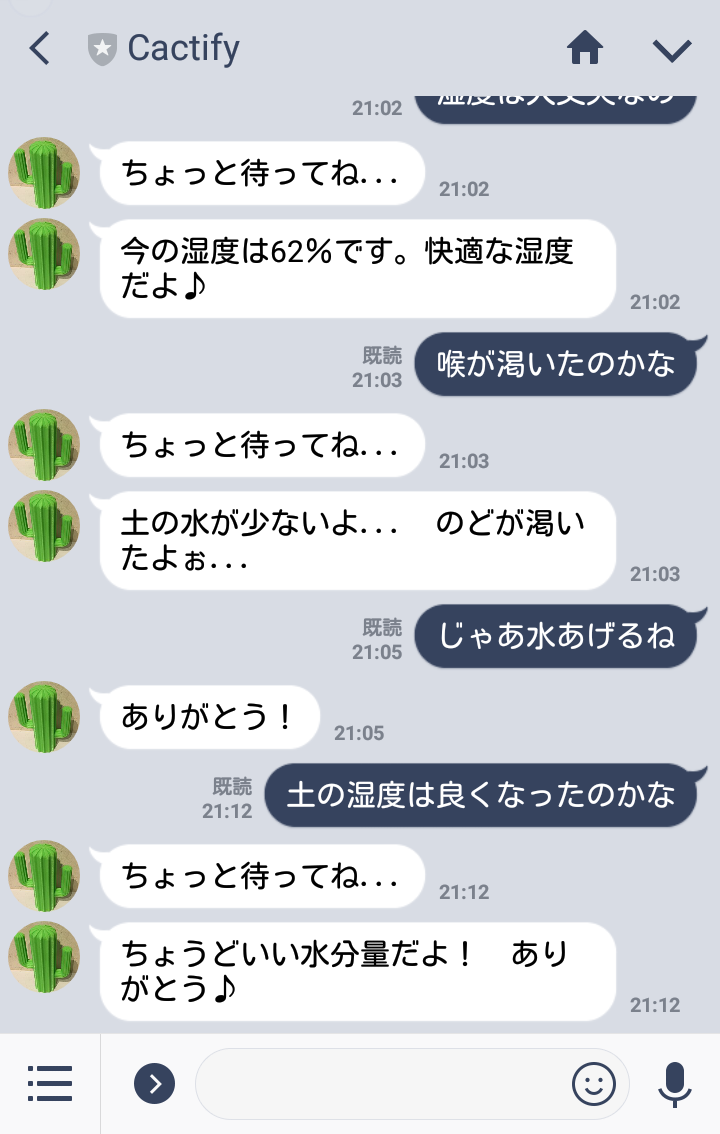
0 そこで私が目をつけたのが観葉植物だ。
そこで私が目をつけたのが観葉植物だ。- 普段は話しかけてきたりしない観葉植物が話しかけてきたら面白い!
→観葉植物に直で話しかける人がいると聞いたこともある...その夢を叶えたい!- 利便性も重視
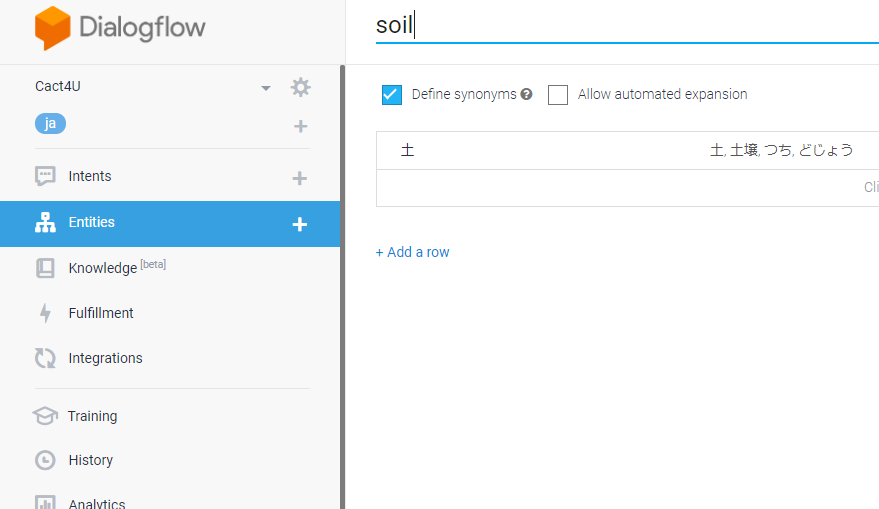
→空気の温度や土壌の湿り気がわかると便利結論として、利便性と面白さを兼ね備えた観葉植物のLINE BOTを作ることに決めた。

























Comments