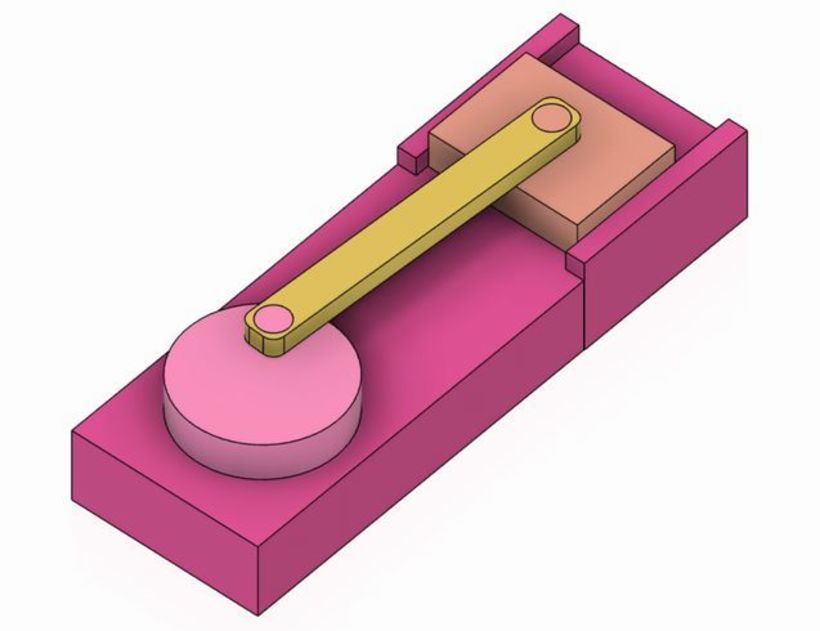
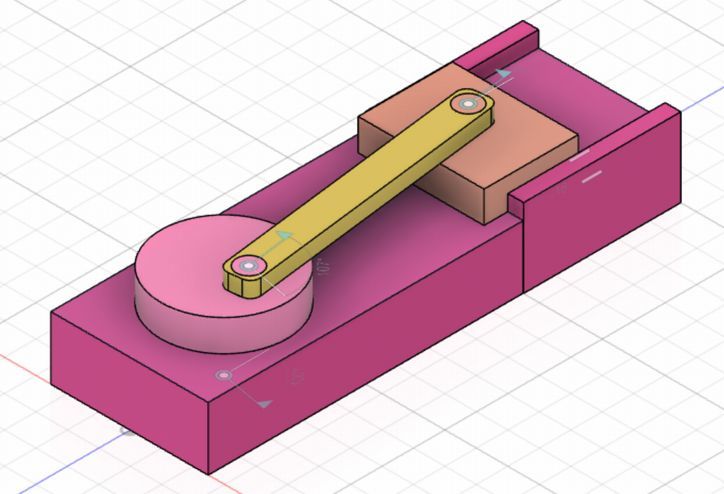
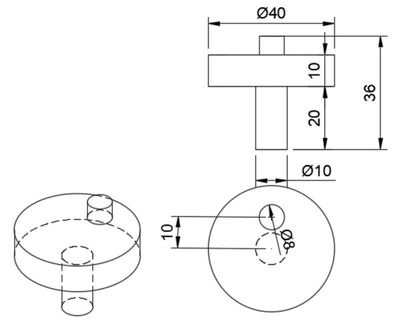
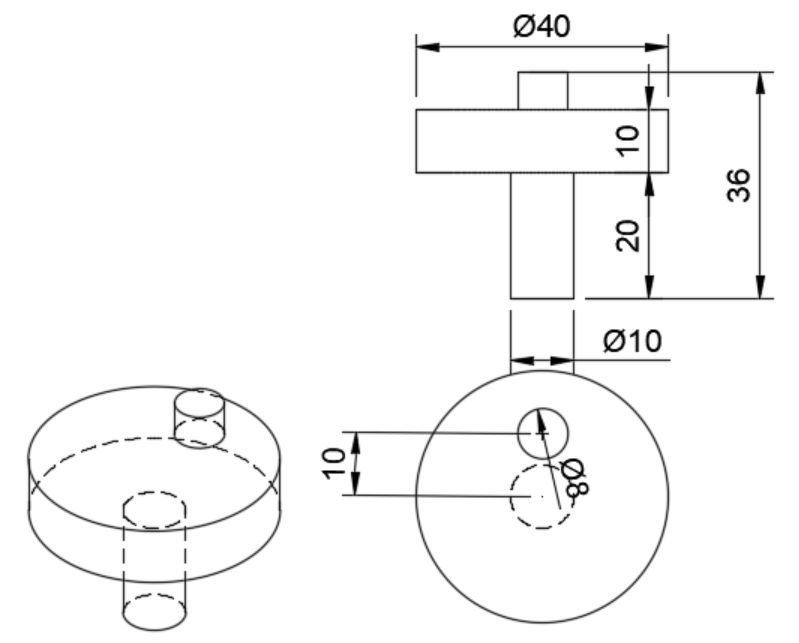
往復スライダクランク機構とは、回転運動を往復直線運動に変換したり、その逆で往復直線運動を回転運動に変換する代表的な機構です。ここでは往復直線運動の移動距離が20mmのモデルをFusion360の各種アセンブリコマンドを駆使して作成していきます。
Fuison360による往復スライダクランク機構モデル
Owner & Collaborators
License

Fuison360による往復スライダクランク機構モデル by robotakun is licensed under the Creative Commons - Attribution license.
Summary
Materials
Tools
Blueprints
Making
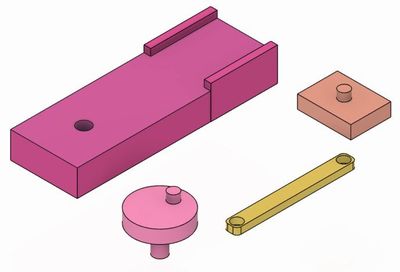
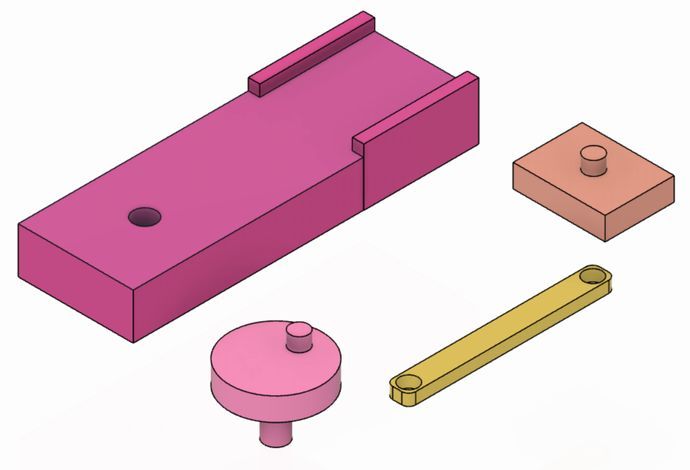
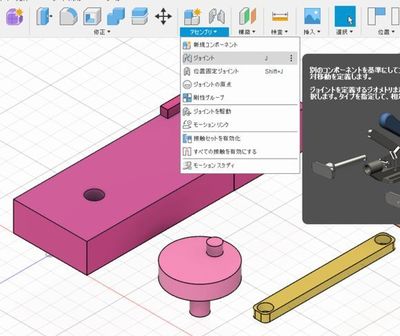
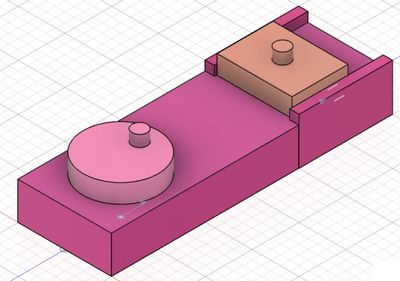
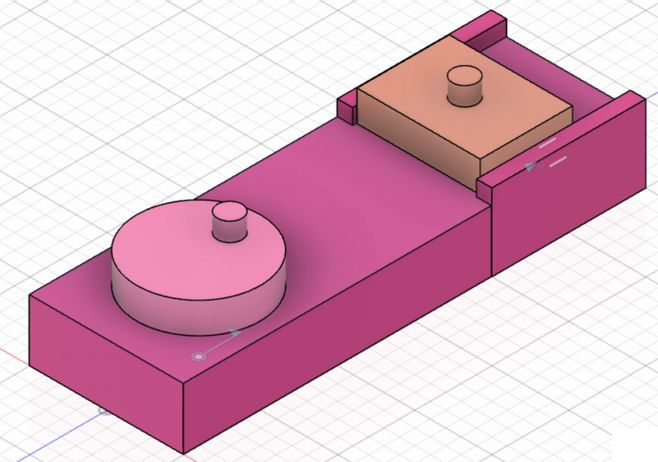
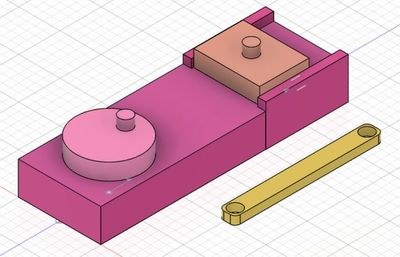
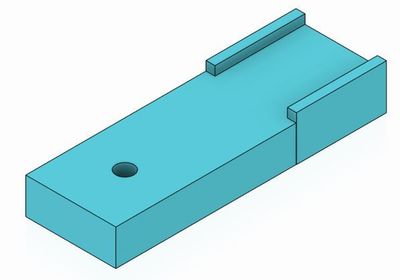
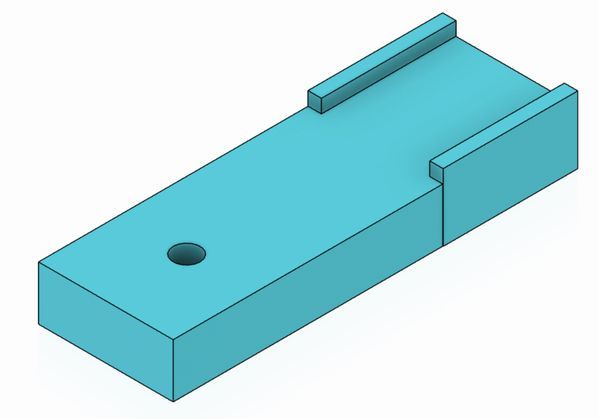
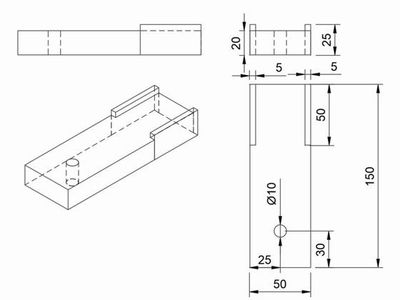
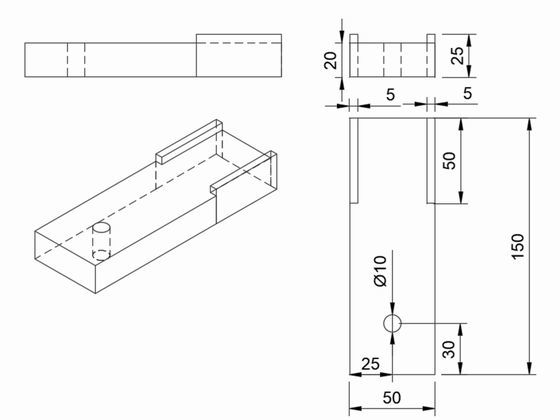
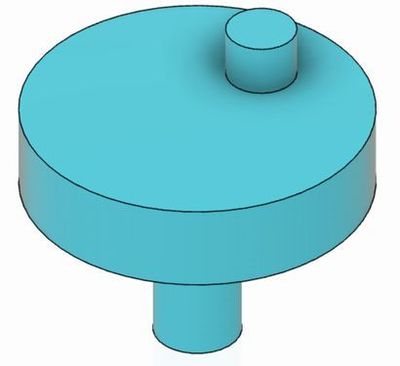
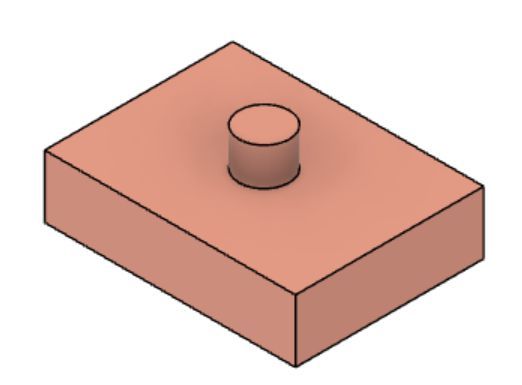
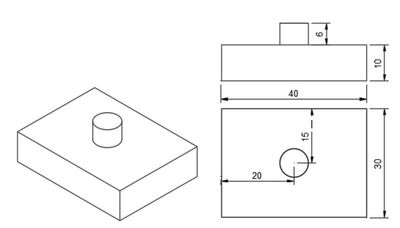
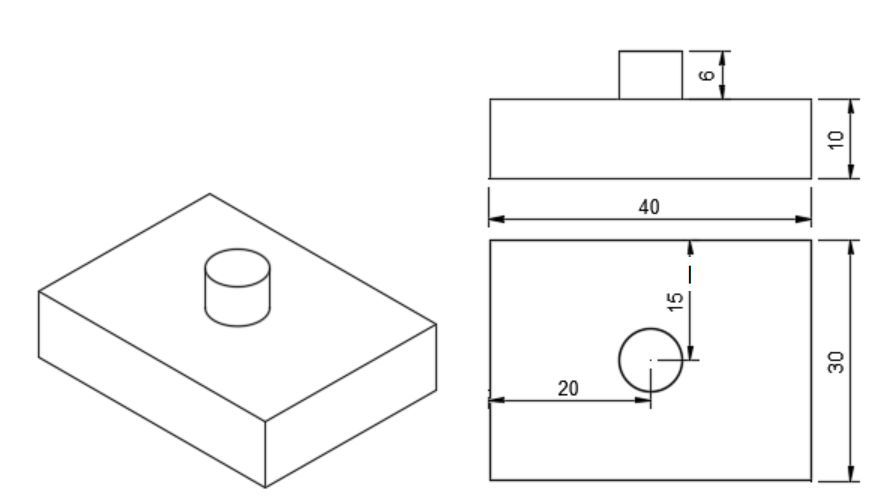
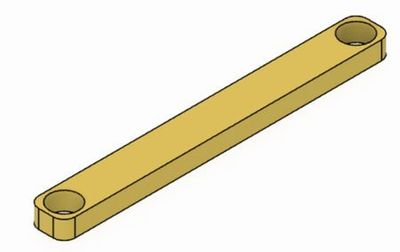
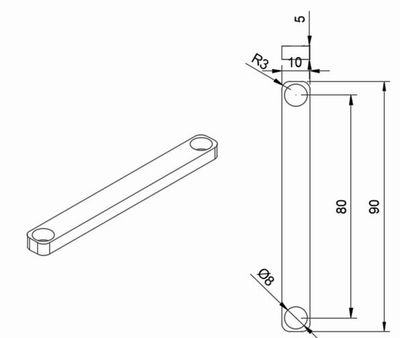
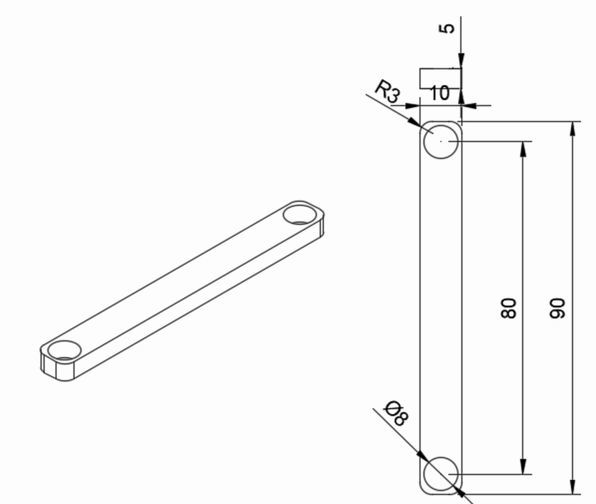
- 往復スライダクランク機構に使用する4つの部品のモデリングを行います。
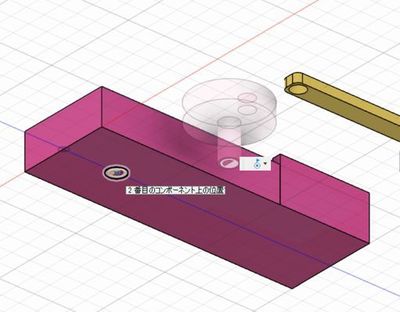
- 4つの部品のモデリングができたら、アセンブリコマンドを使用して組み立てていきます。
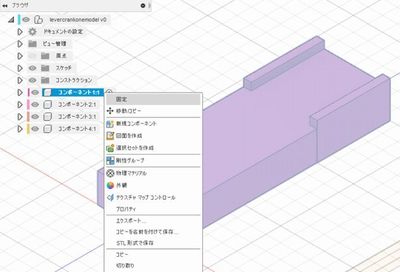
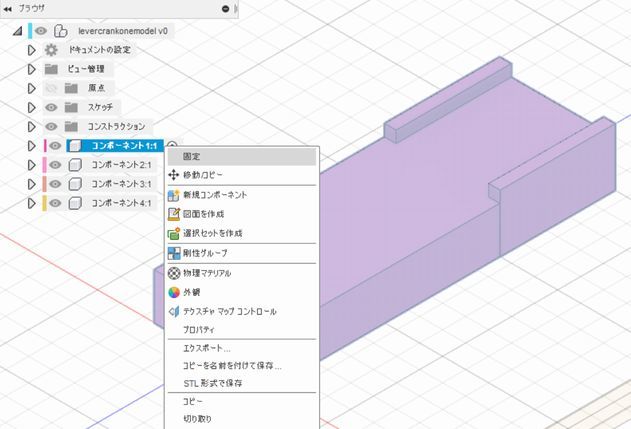
- 土台を「固定」して動かないようにします。
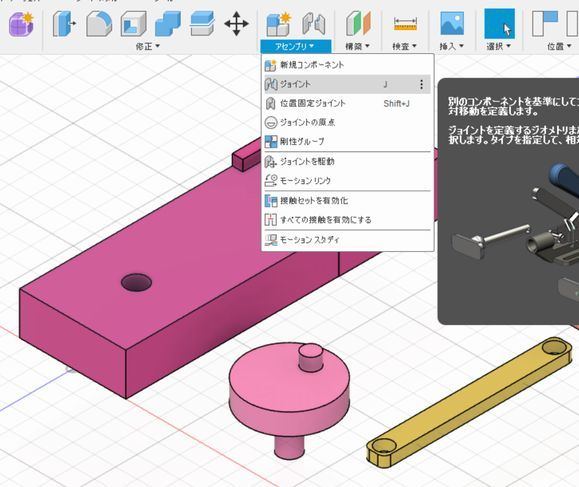
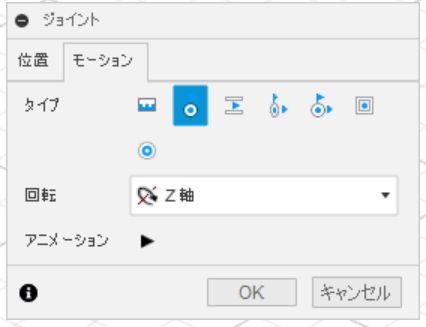
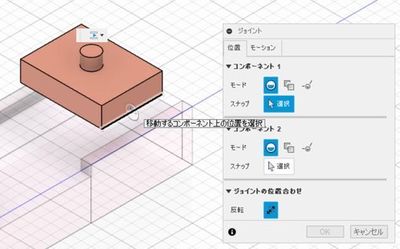
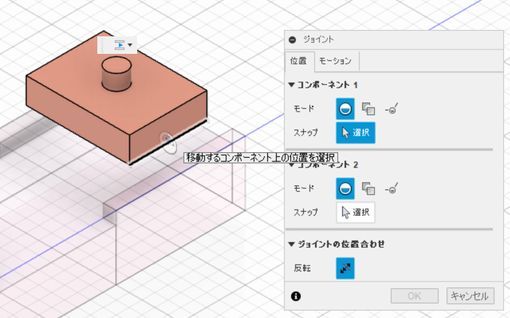
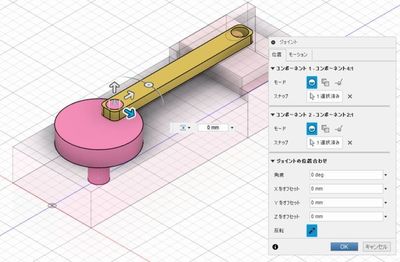
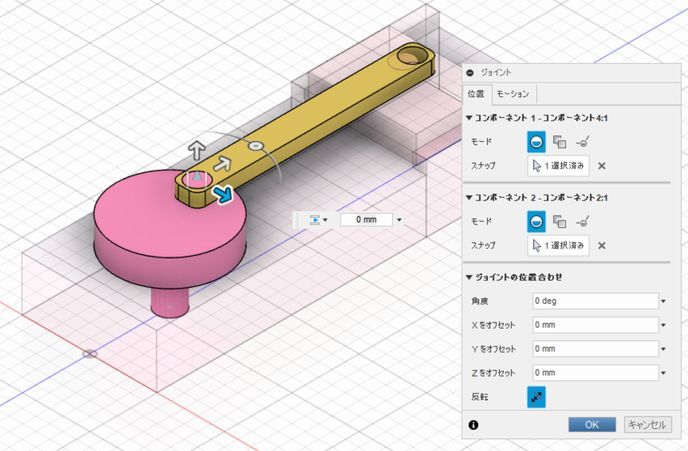
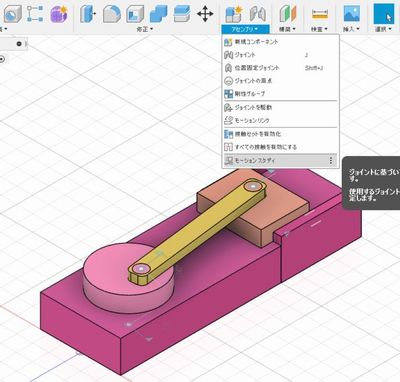
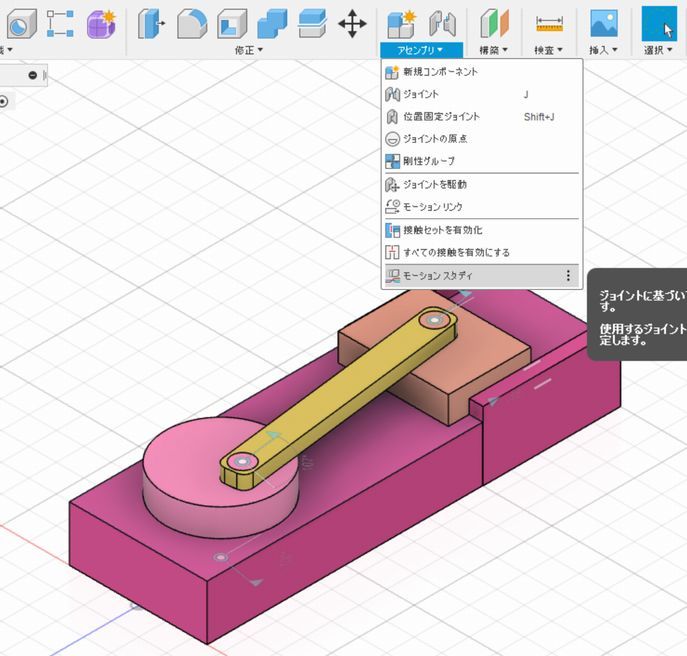
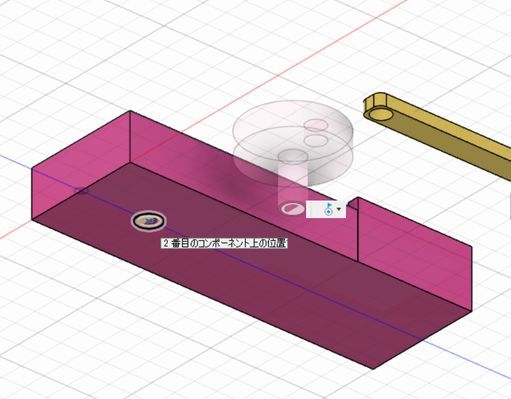
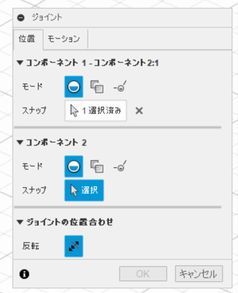
- ここからはアセンブリ→ジョイントを使っていきます。
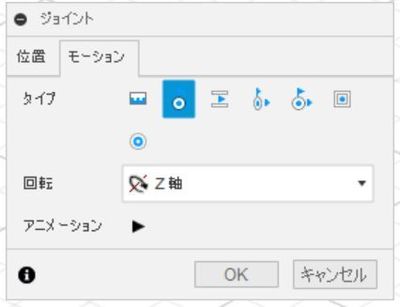
- モーションを「回転」にします。
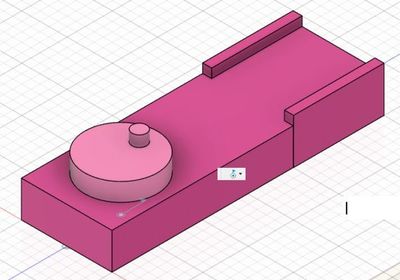
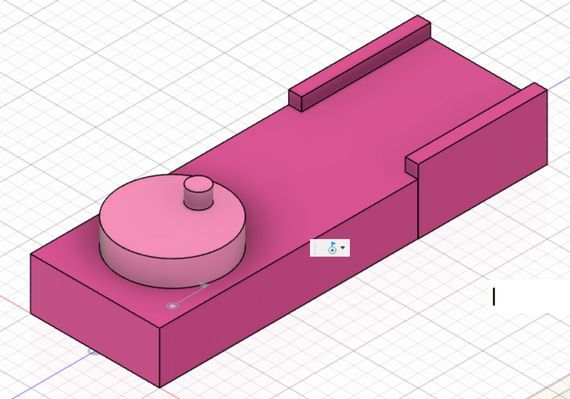
- つり合いおもりの中央部の裏側からの円柱が土台にはめ込まれ、回転ジョイントが完成します。
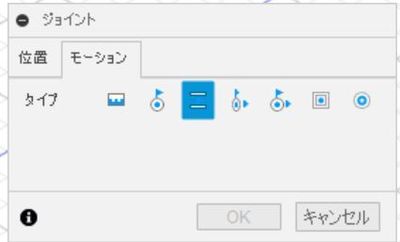
- 次は土台の上をクランク上部の部品がスライドするように、ジョイント→スライドのコマンドを使います。

- スライドする直線にチェックをします。
- 向きを変えて、土台側のスライド部をチェックします。
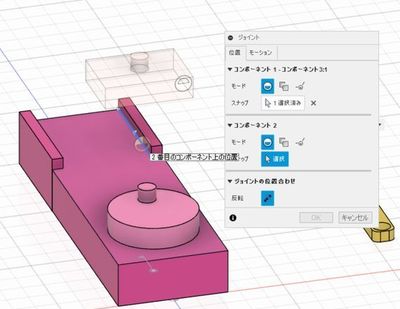
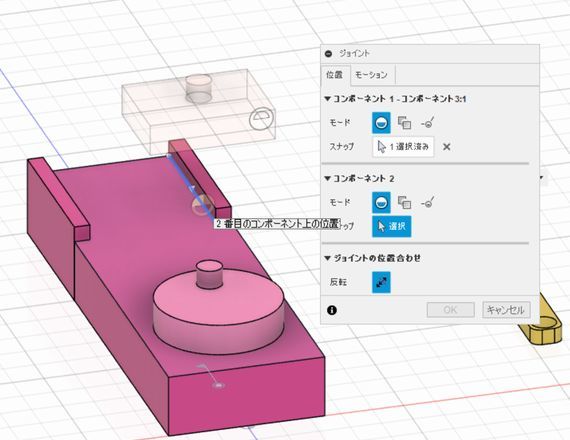
- 2か所の直線をチェックしてOKをクリックするとピストン上部の部品が土台の上をスライドします。
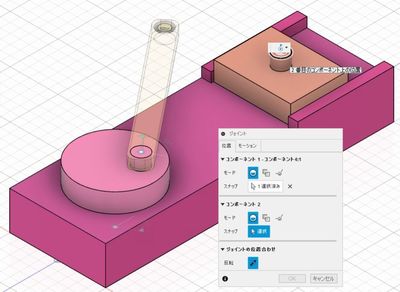
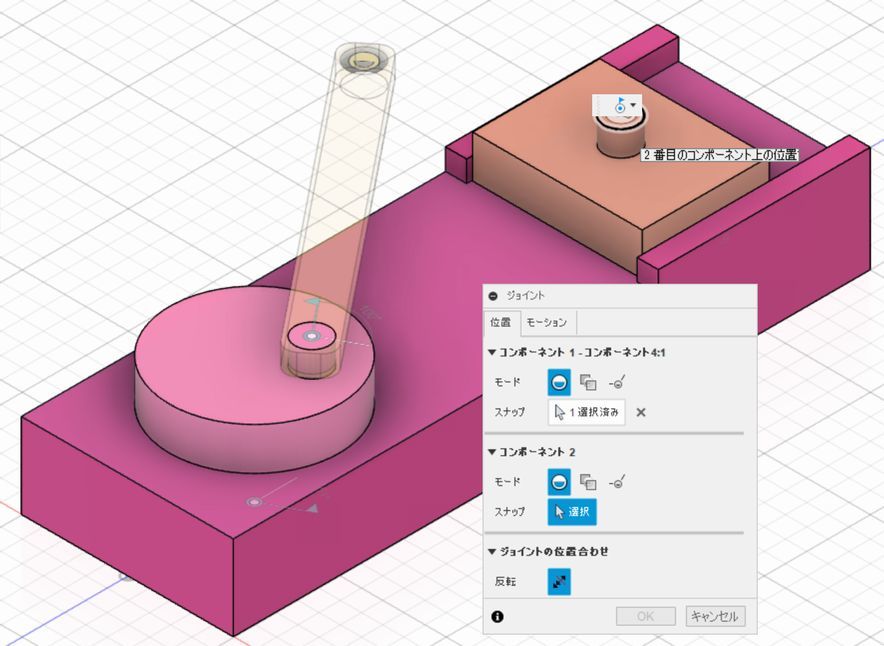
- 最後に連接棒をジョイント→回転で接合します。最初と同様なので次の項目を見ないでチャレンジしてみてください。

- 連接棒の上部の円とつり合いおもり上部の円をチェックしてOKをクリックします。このときモーションをスライドから回転にすることを忘れないようにしましょう。
- 同様にして2か所の円をチェックします。
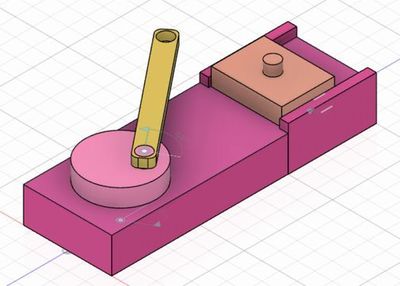
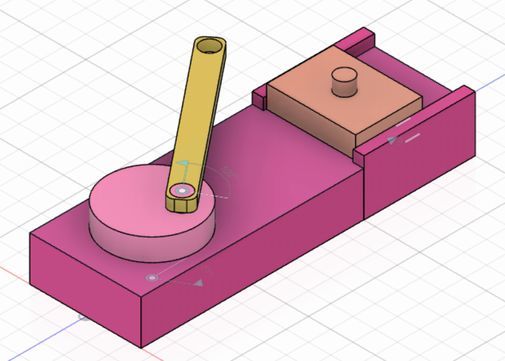
完成!
0 これで完成です。マウスでつり合いおもりを回してみると往復スライダクランク機構が動くことがわかります。
これで完成です。マウスでつり合いおもりを回してみると往復スライダクランク機構が動くことがわかります。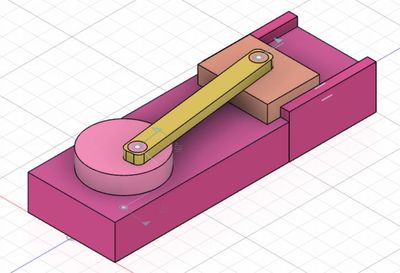
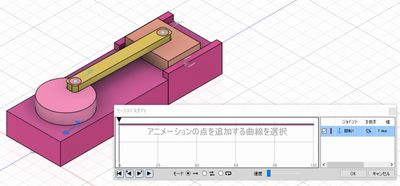
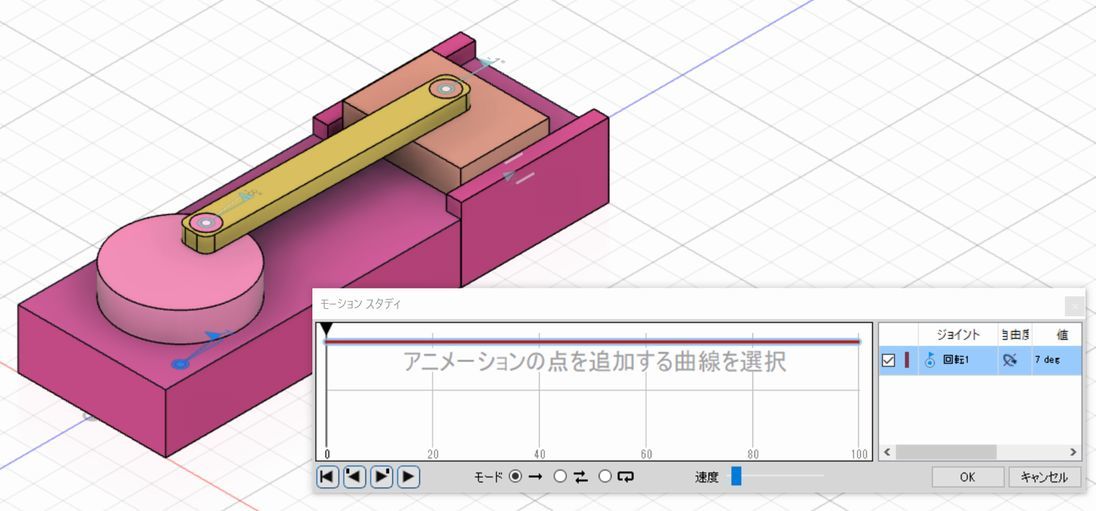
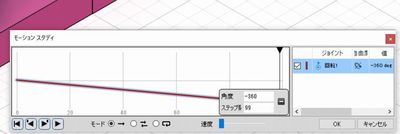
- モーションスタディで自動的に回転させてみましょう。
- ShowmoreでキャプチャーしてYouTubeにアップしました。


References
Usages
Project comments

Comments