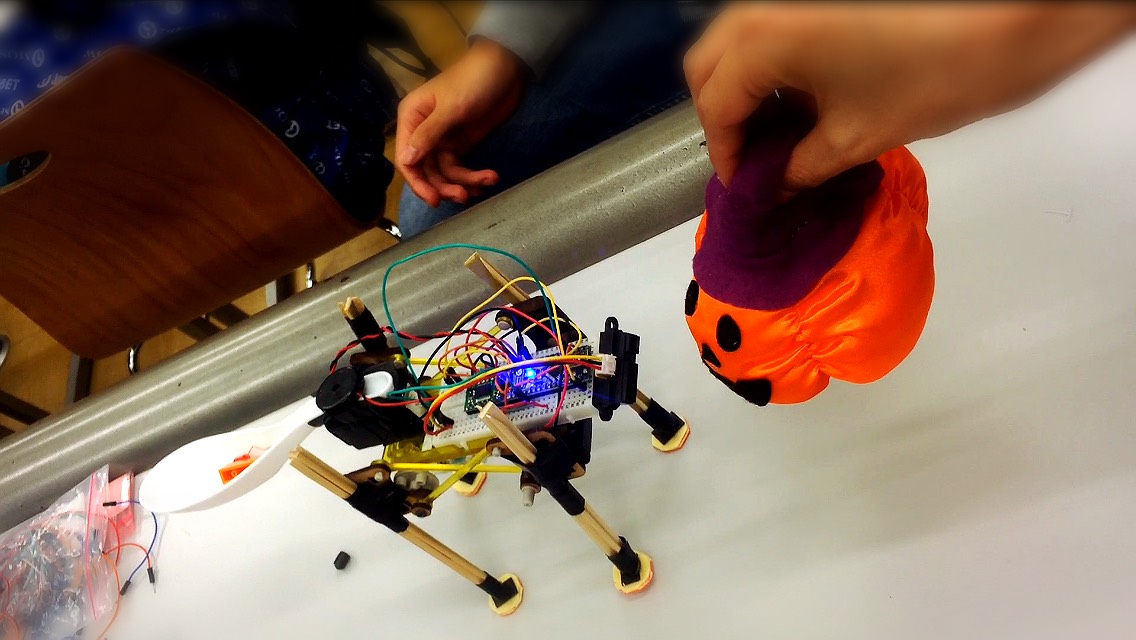
ロボットの動きを制御するためのマイコン部分を作る。
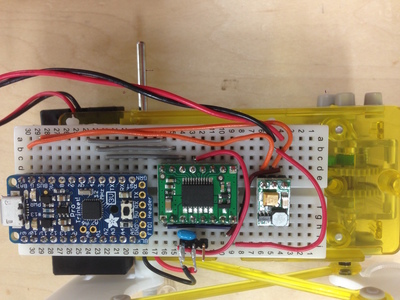
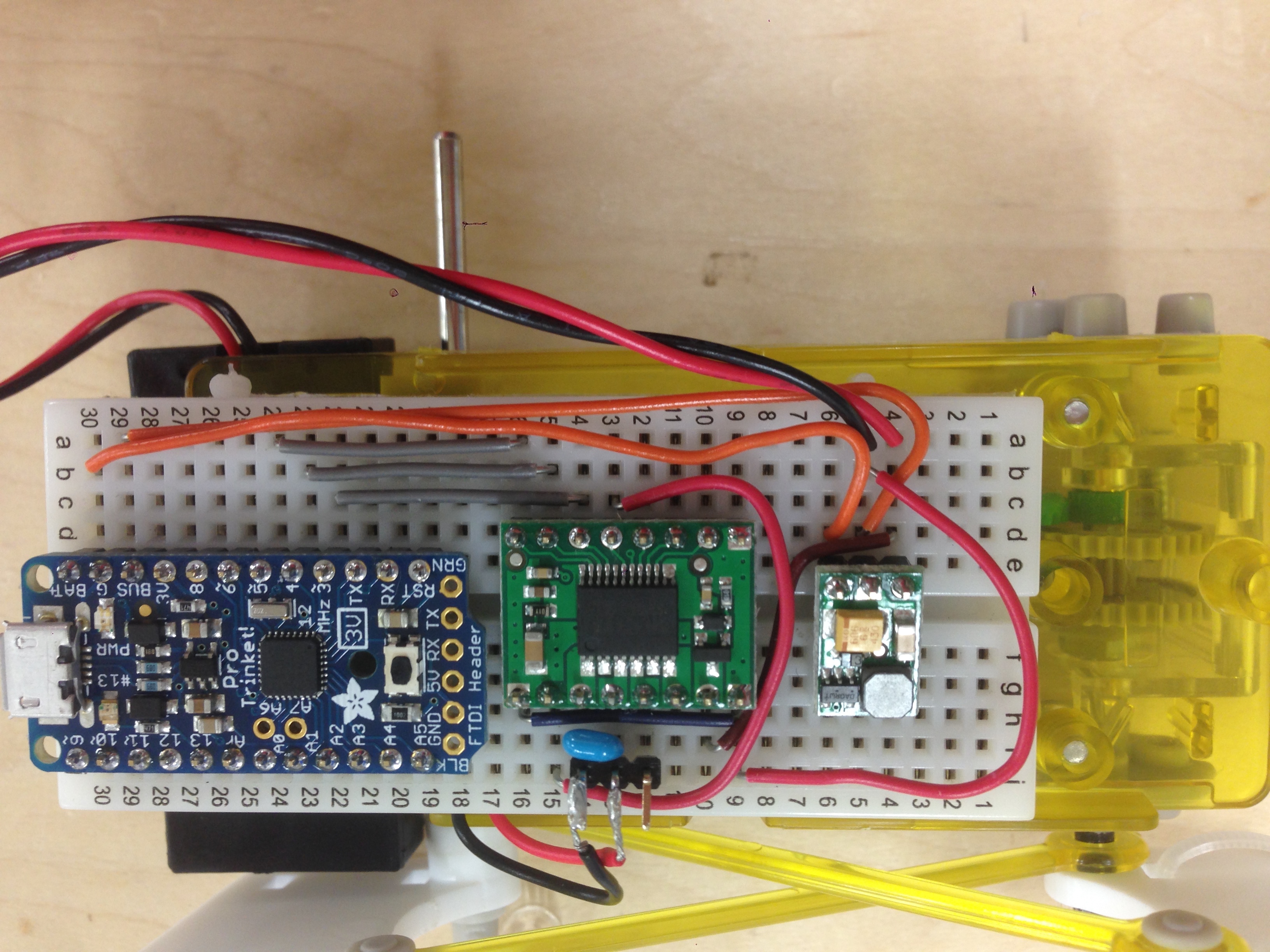
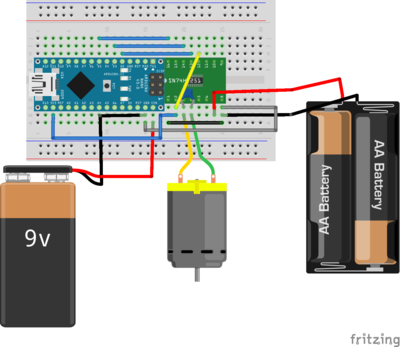
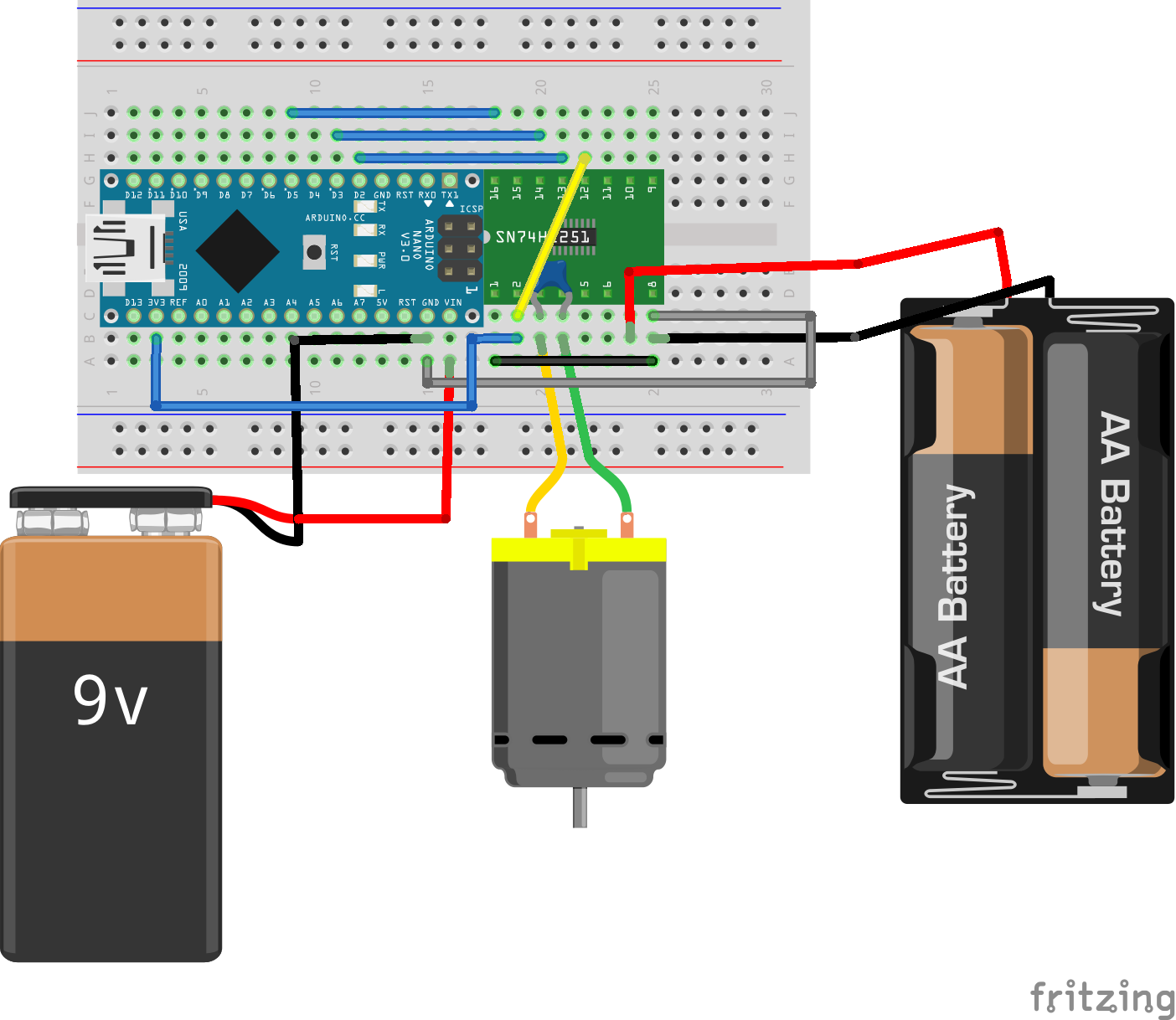
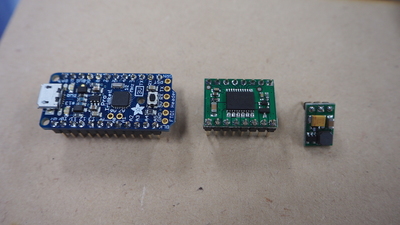
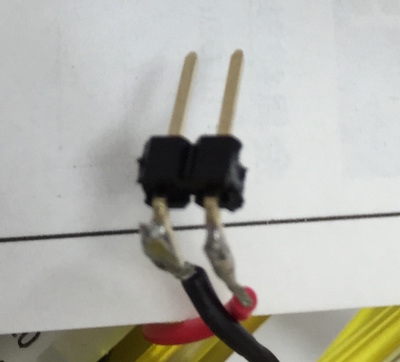
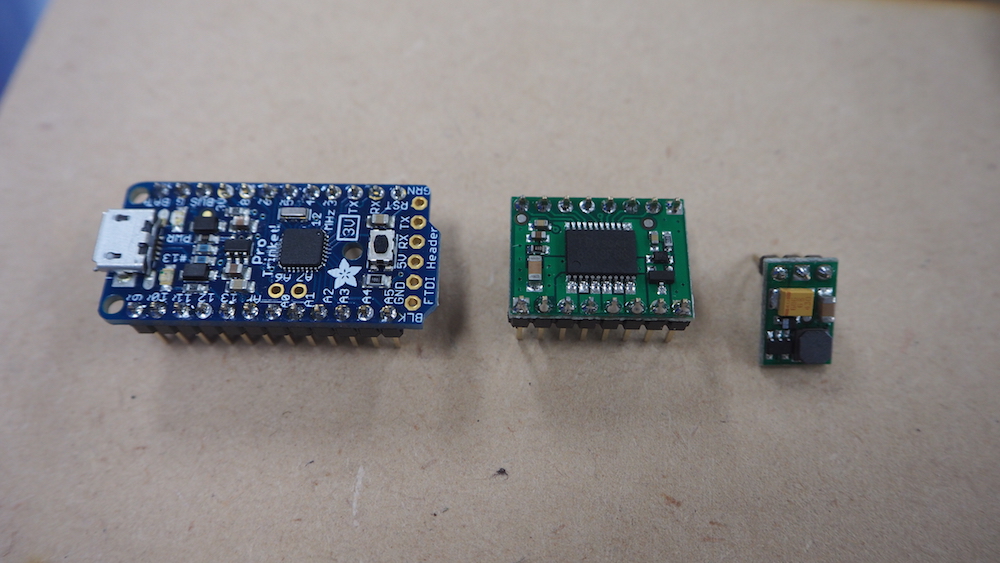
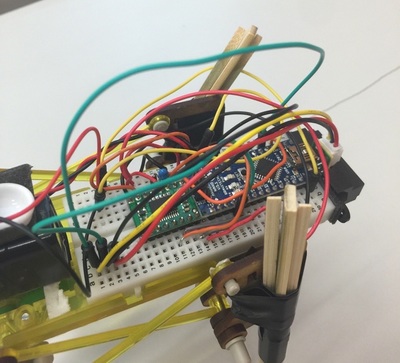
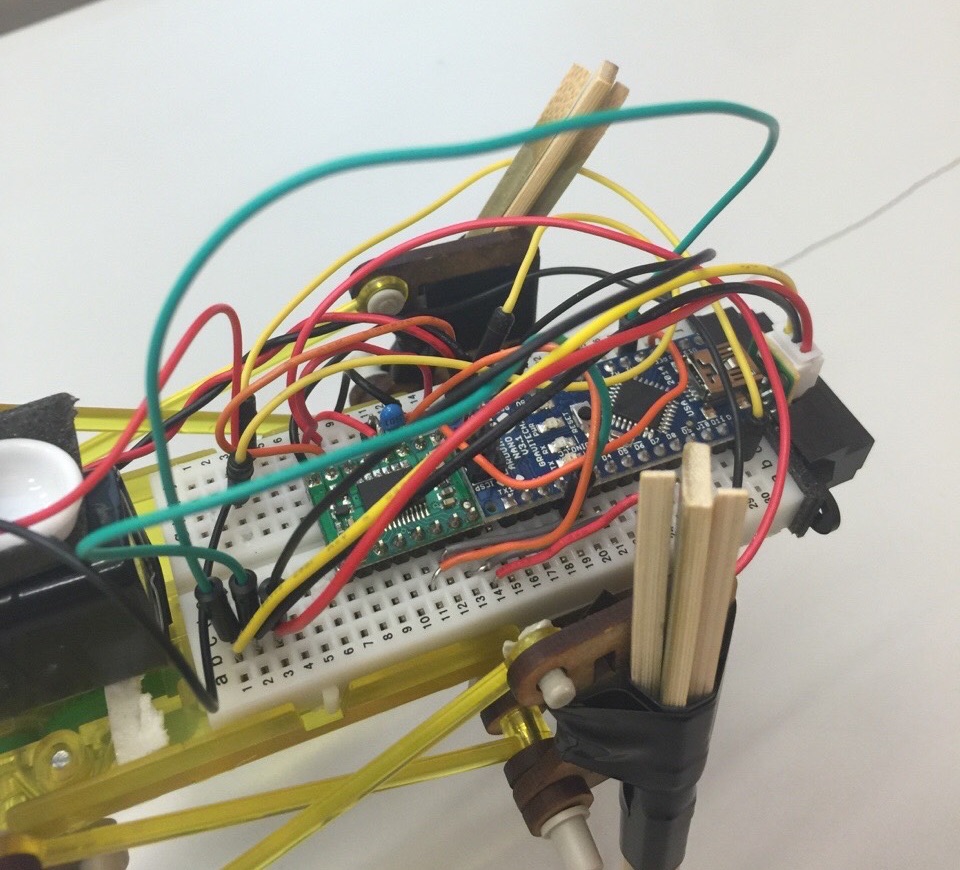
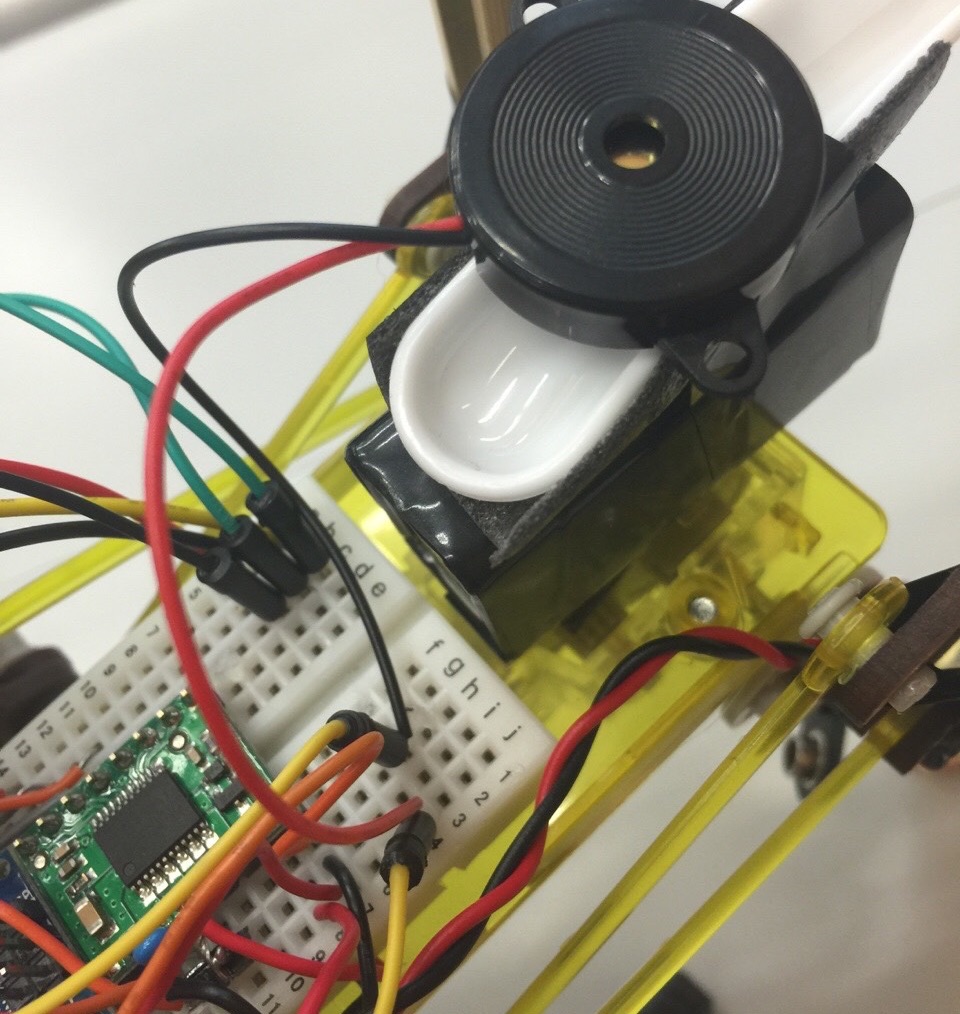
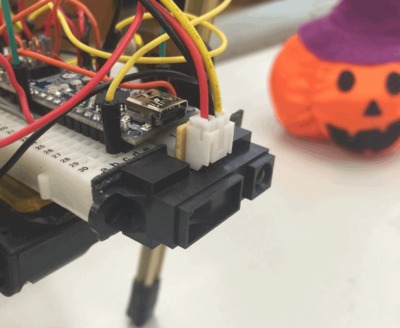
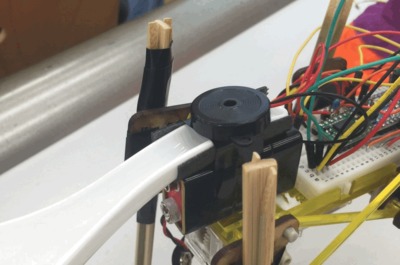
- それぞれの部品を、回路図を参考に部品を配置する。(※向きに注意。前工程の写真や部品裏のピン名称を参照)ブレッドボードは筺体のサイズに合わせるため、両端の二列は外しておく。モータはギアボックスに取り付けられているので、後で配線する。
- 配置したら下記のスケッチプログラムをArduinoにアップロードする。書き込み方・ArduinoIDEをダウンロード,インストール Arduino IDE・IDEを開いたら、ツール->マイコンボードの中からArduino Nano w/Atmega328を選択・シリアルポートを選択 tty... かcu...
- スケッチプログラムの中身1.前方の対象物との距離が400未満の場合(前進/スピード200)
・ if(sensorValue < 400 )の400の部分を変更することで対象物とどれくらいの距離になるまで歩き続けるかが変更可能
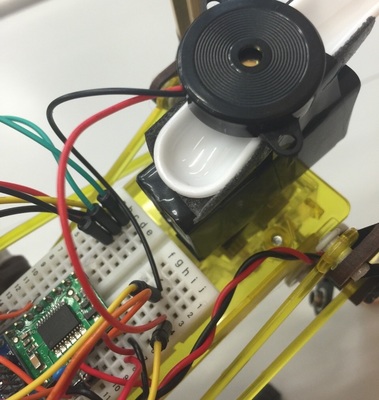
・analogWrite(5, 200)の200の部分を変えることで歩く速度を変更可能2.前方の対象物との距離が400より大きい場合(停止/警報音)・ tone(SPEAKER,tone,BEATTIME) ; のtoneの部分を変えることで警報音の音程を変更可能
delay(BEATTIME) ;BEATTIMEの部分を変えることで一音の長さを変更可能






Comments