

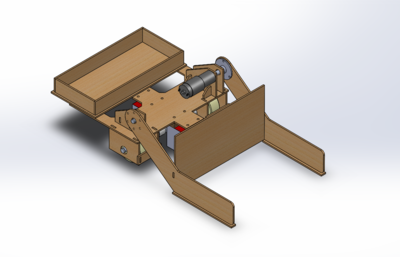
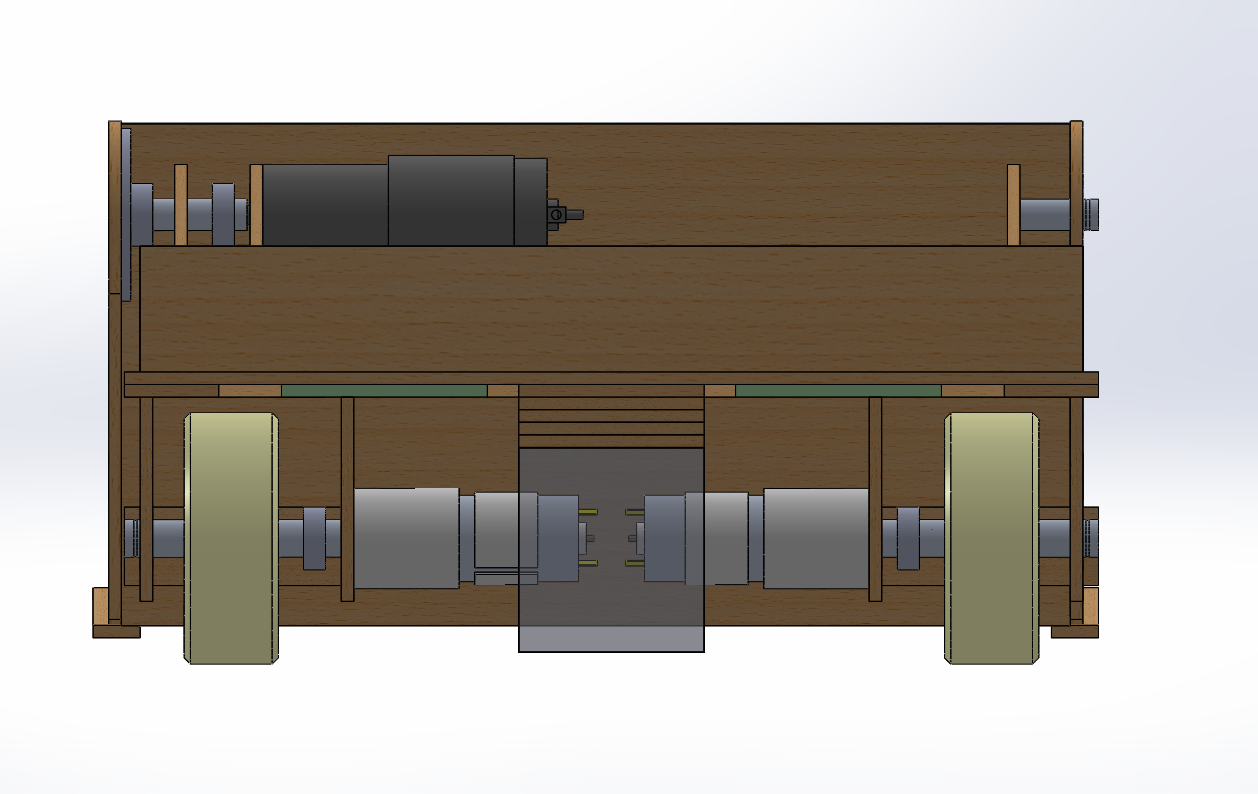
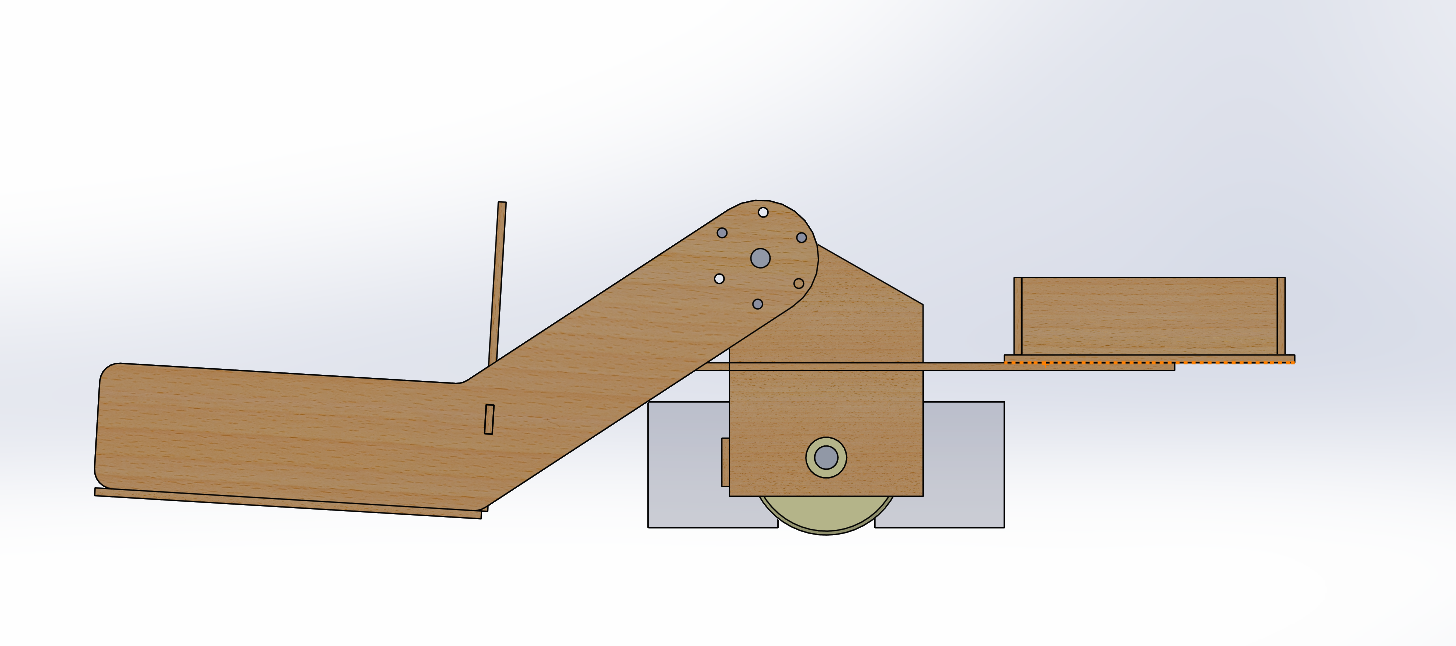
今回はクラス展示用のロボットなので簡単な構造を意識して製作しました。
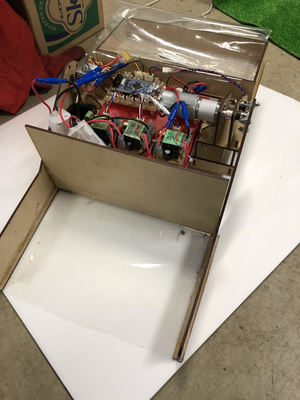
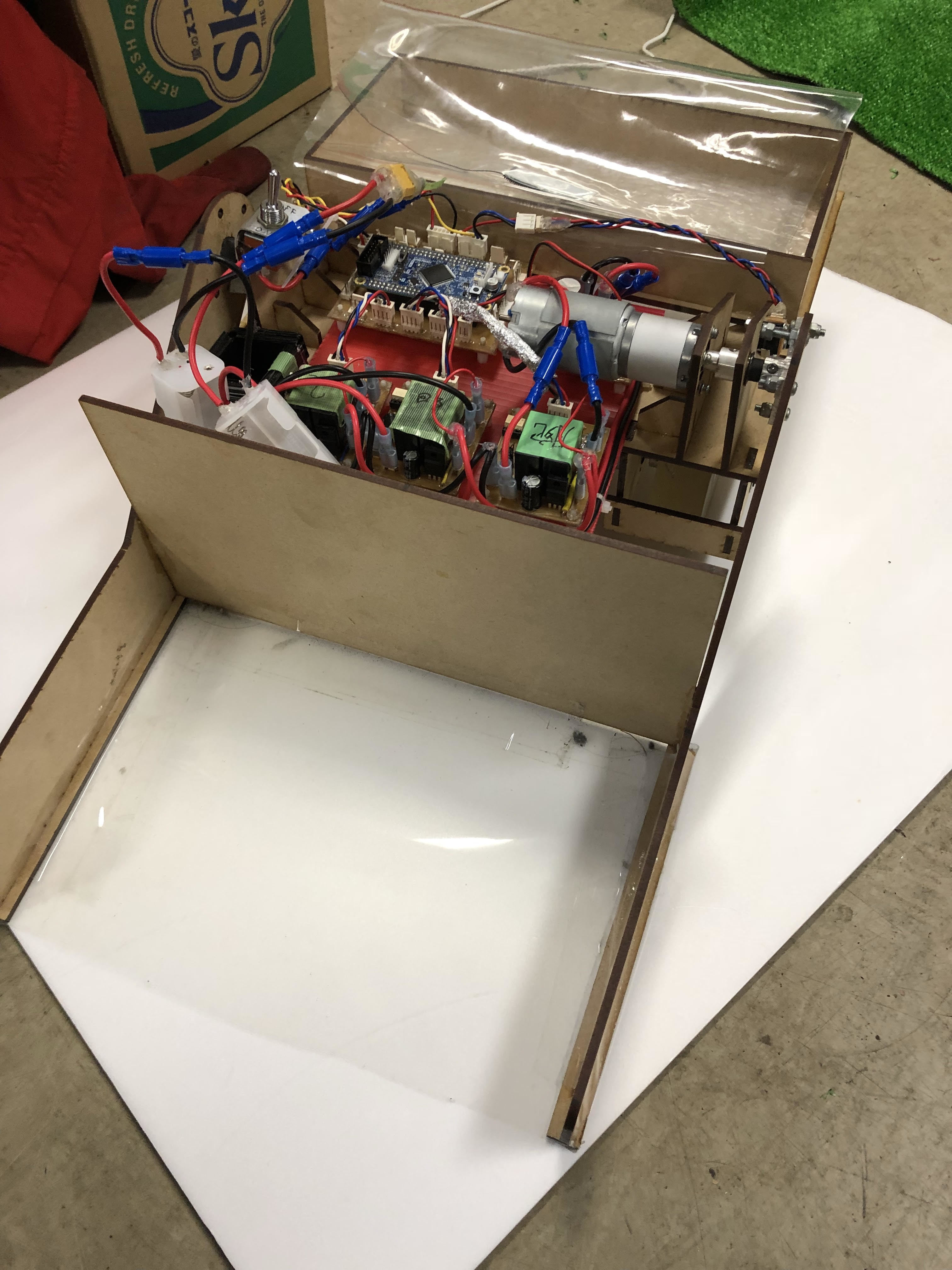
- 必要な材料は以下の通りです。1.アルミ軸(φ12、φ10)今回の製作では材料の都合上φ10の軸を使用していますφ12で統一できます。モーターと軸の固定にはφ20の軸から作られたカラーを使用しています。2.mdf(t = 4)3.DCモータ(RS-385)(RS-555)4.フランジ今回の製作では10mmのアルミ板をNCフライスで加工したものを使用,3Dプリンタでも製作可能です。5.クリアファイル6.カラー付きウレタンローラ(外径80、内径12、厚さ30)7.キャスター全方位に対応しているものを使用します。8.木工ボンド9.つば付きベアリング(内径12,外径21)10.Cリング11.ねじ等
- 1.SolidWorks20132.レーザーカッター(加工範囲600*300)3.卓上ボール盤4.卓上旋盤





Comments