

昨年は17mまで到達したが、いわゆるパラシュート型であり、邪道と言われても仕方が無い。
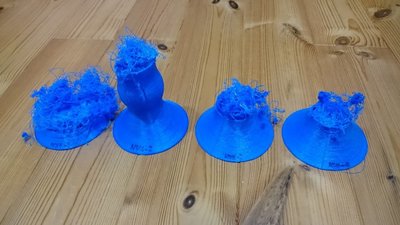
3人が17mまで到達したが、落下のビデオを3つ並べてみると、一目瞭然。譜久原氏のReacushion(リアクッション)は圧倒的な速度で落下しても割れない。あれは圧巻だ。
なので、今年は帆を付けず勝負をする。
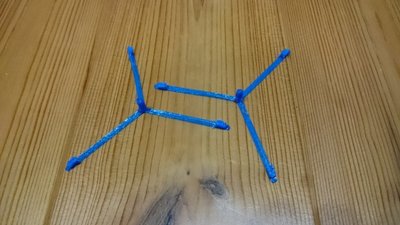
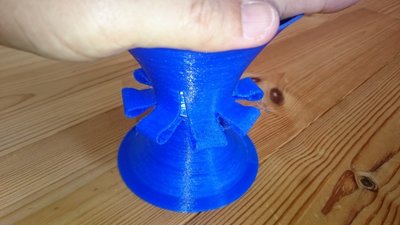
- 一般的にエッグドロップを成功させるには次の2要素が重要となる。・地面への衝突エネルギーを装置本体で吸収させる・落下速度を下げる衝突エネルギーを本体が吸収する前に卵に伝わったら割れてしまう。そのため、卵にエネルギーが伝わる前に本体側でエネルギーを吸収させるために、昨年はゴム素材の使用と、落下速度を緩和させるために帆を付けた。
- 昨年の実戦大会で気付いたことなのだが、姿勢制御が非常に難しい。実戦大会は屋外で実施するのだが、風が少しでも吹くと、本体が傾き、地面との衝突時にエネルギーの分散が狙った方向にいかず、失敗している参加者も多かった。また、自分を含めたパラシュート型は風にはめっぽう弱い。簡単に流されてしまう。従って、今年は、新たに1項目を追加した。・衝突エネルギーの吸収・落下速度の減少・姿勢制御帆は、落下速度を下げ、姿勢制御にも役立っていたのだが、、、今年は使わずに挑むのだ!
















































































Comments