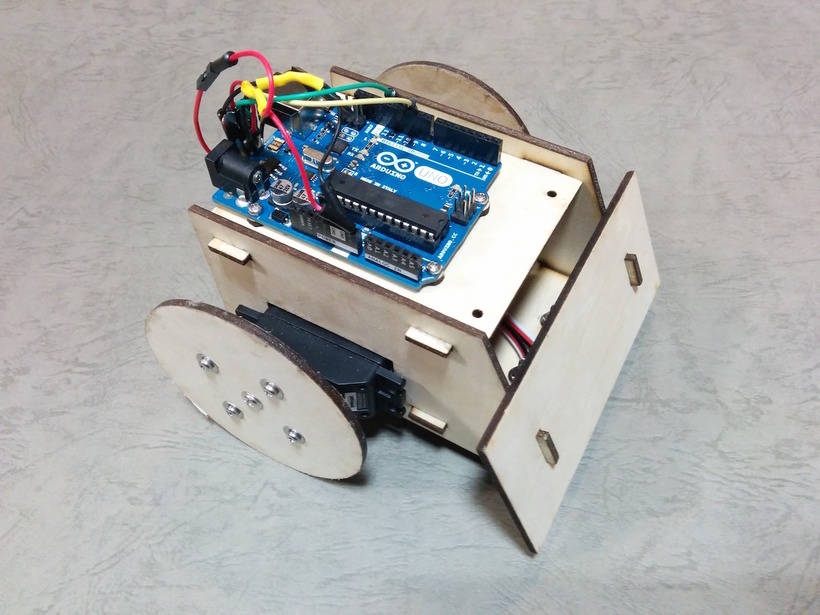
Sumobot Jr0Sumobot Jr はオープンソースのロボットカーのキットです。オリジナルから設計データを少し変更しています。設計データやプログラムなどは Github で公開しています。Raspberry Pi で制御するバージョンもあります。Sumobot Jr with Raspberry PiAdd Annotation Order
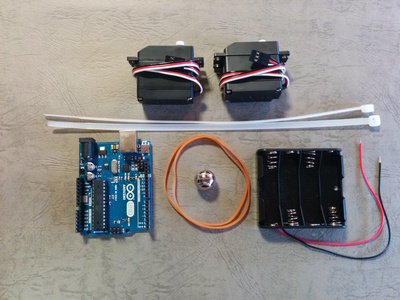
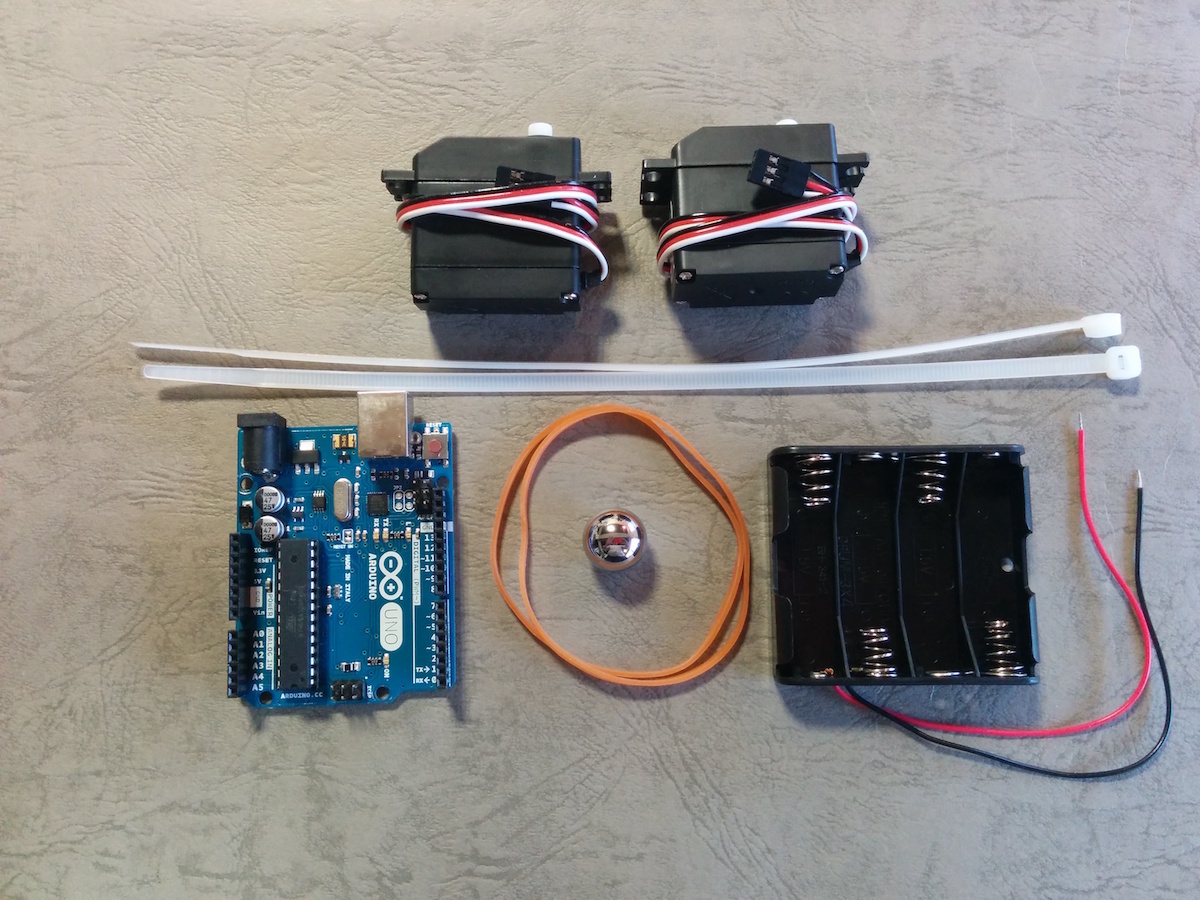
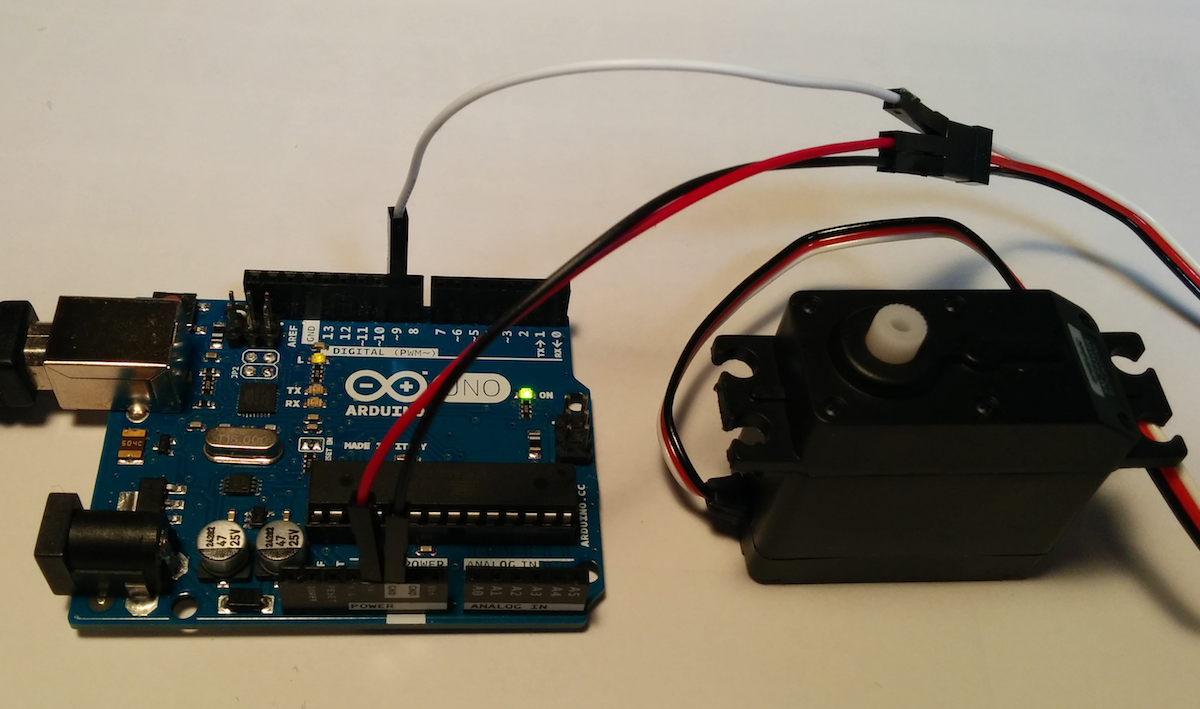
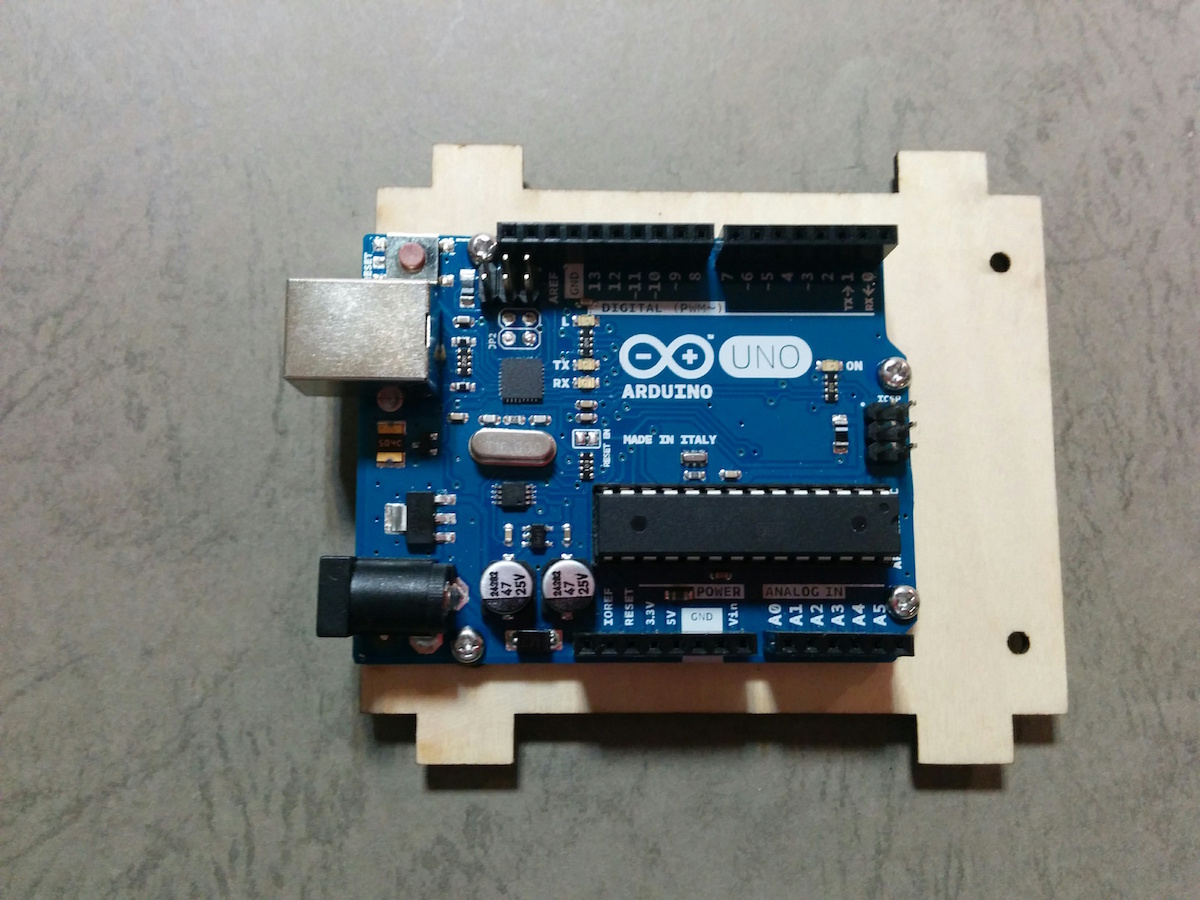
部品0Arduino Uno電池ボックス (単三x4本)単三電池 x 4本連続回転サーボ SM-S4303R x 2個 16mm ボールネジとナット M2.6x10mm x 12本、M2.6x15mm x 2本結索バンド 20cm x 2本ゴムバンド #25 3mm幅 x 2本線材 少々厚紙Add Annotation Order
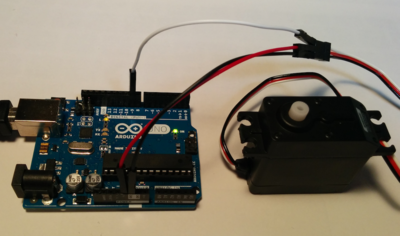
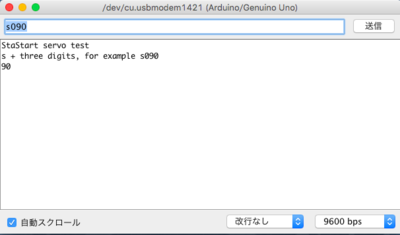
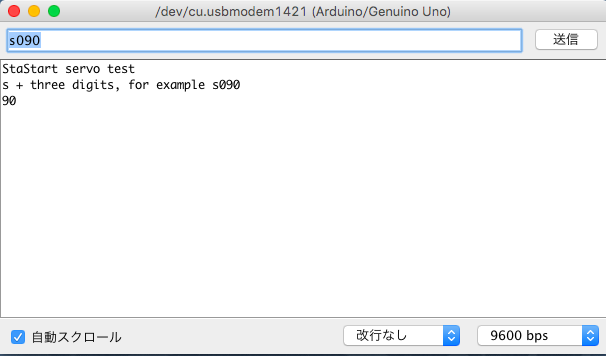
サーボの動作確認0サーボが所望の動作をするか確認します。特に、停止を指定したときに、ちゃんと停止しているかを確認します。servo command0Arduino に servo_command を書き込みます。シリアルモニタからコマンドを入力します。コマンドの形式は、s + 3桁の数字です。s000 : 時計周り 高速s080 : 時計周り 低速s090 : 停止S100 : 反時計周り 低速s180 : 反時計周り 高速Add Annotation Order
servo command0Arduino に servo_command を書き込みます。シリアルモニタからコマンドを入力します。コマンドの形式は、s + 3桁の数字です。s000 : 時計周り 高速s080 : 時計周り 低速s090 : 停止S100 : 反時計周り 低速s180 : 反時計周り 高速
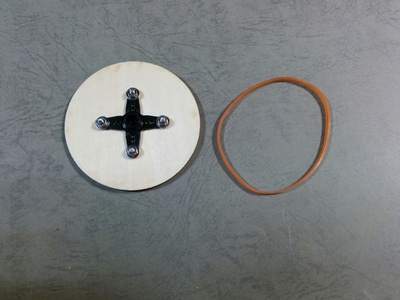
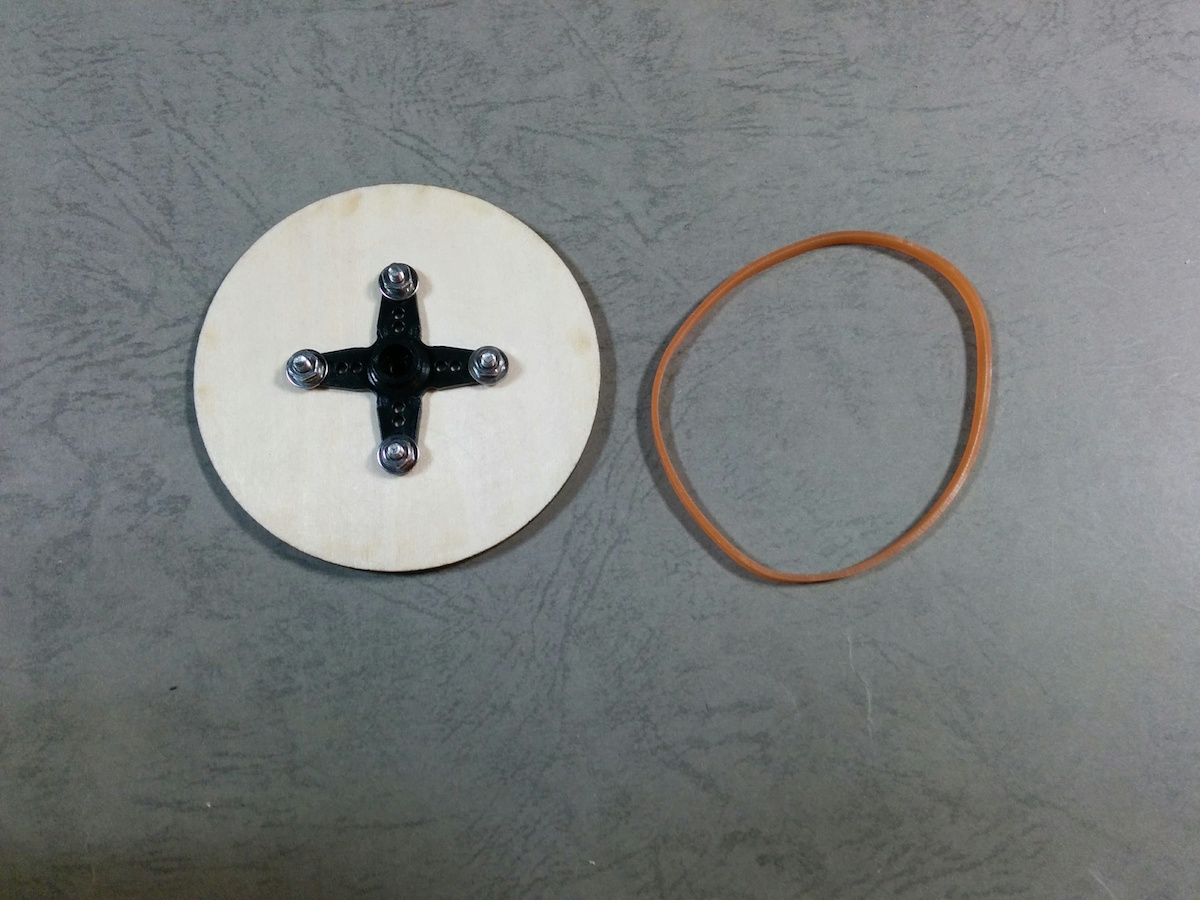
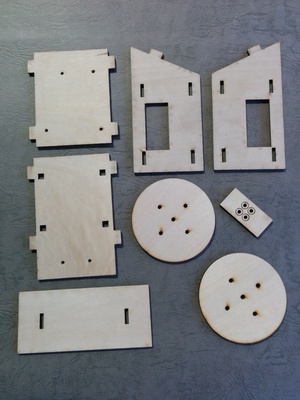
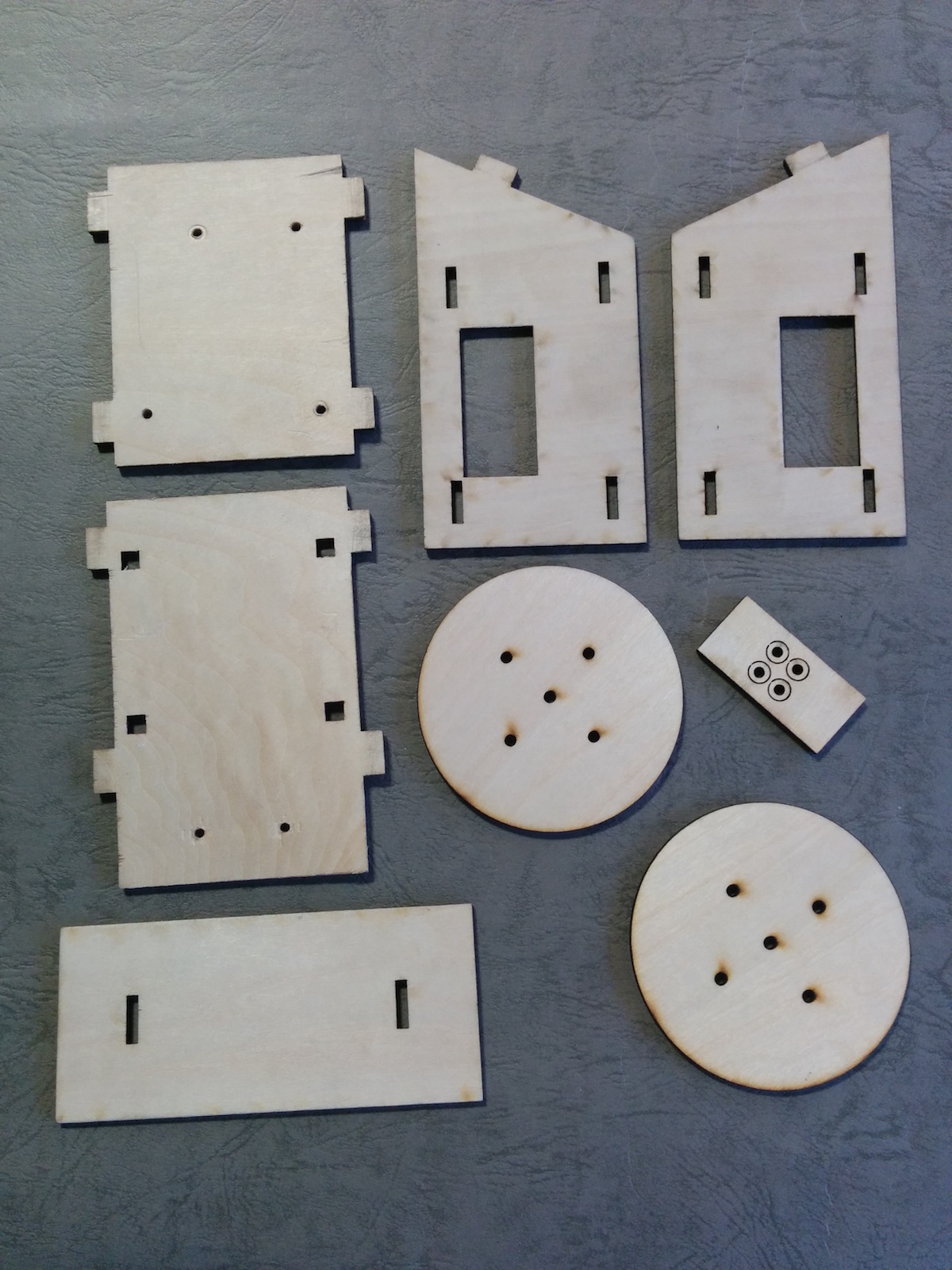
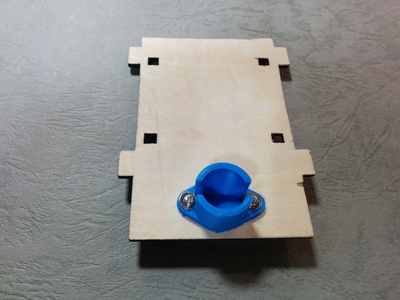
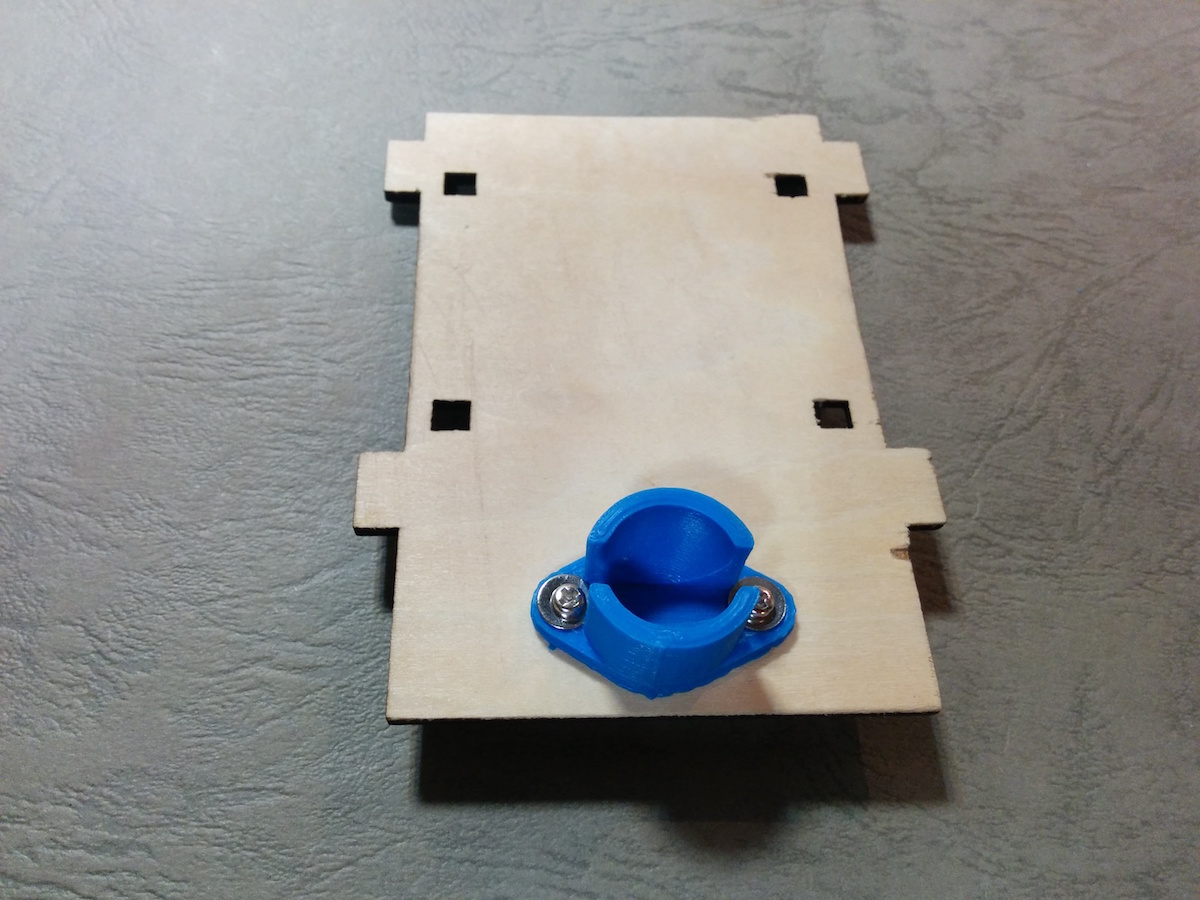
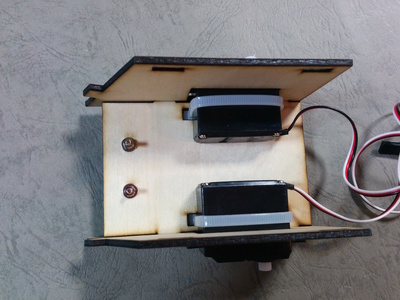
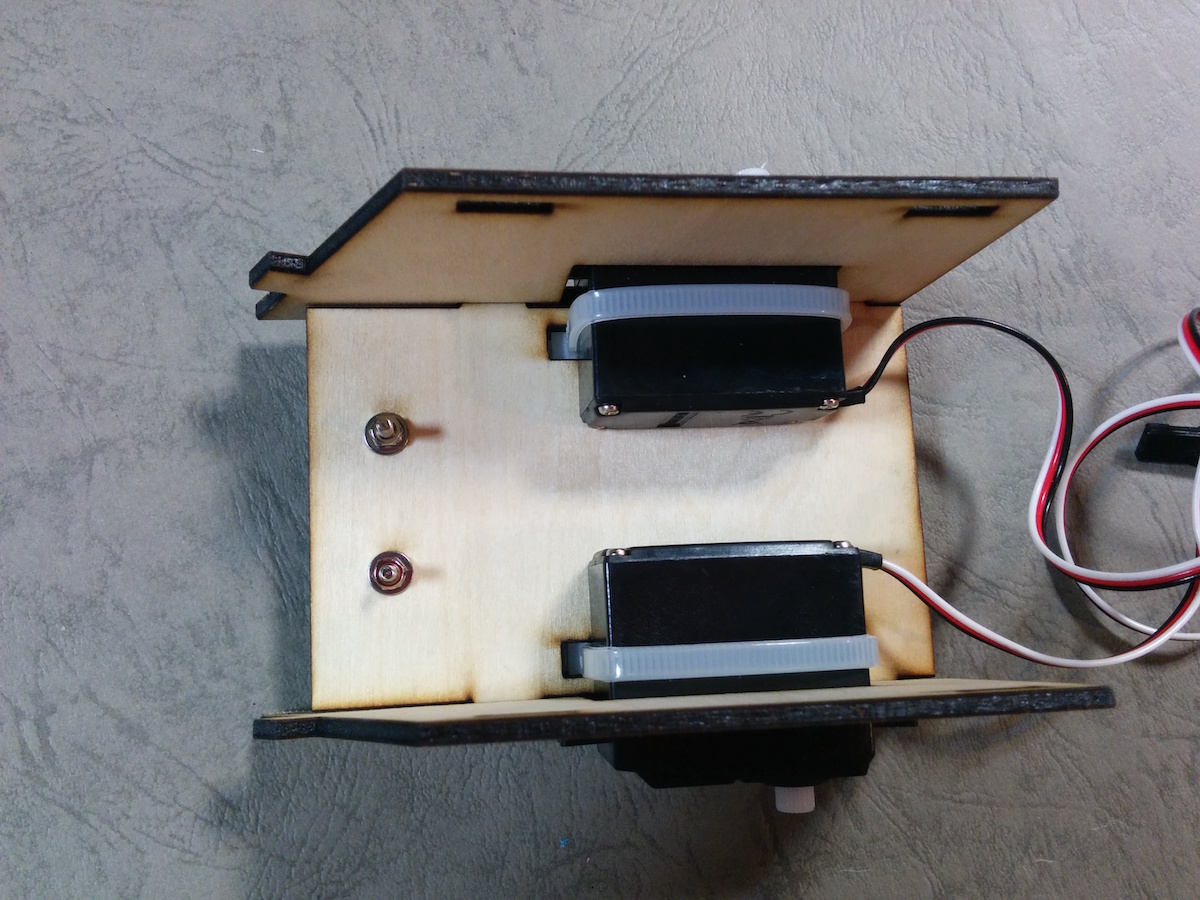
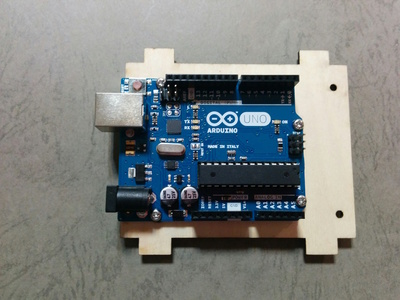
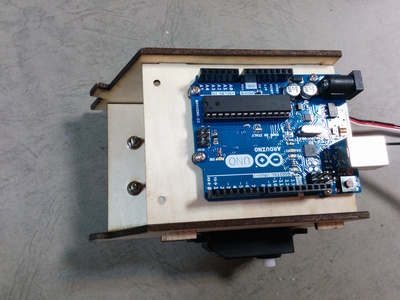
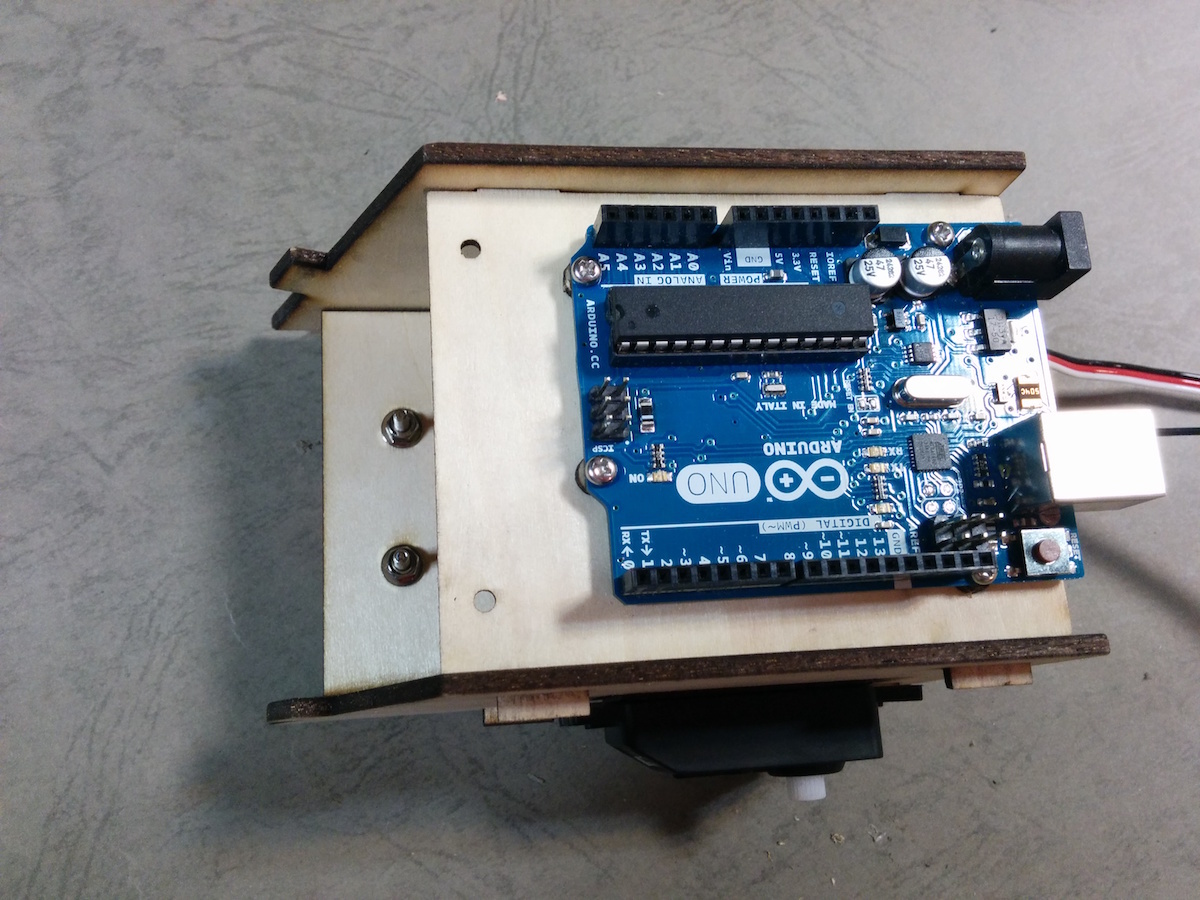
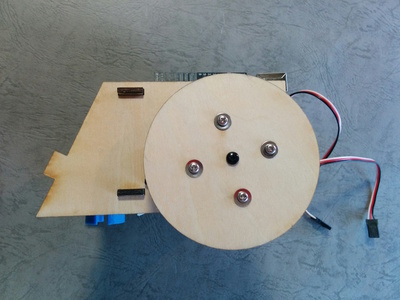
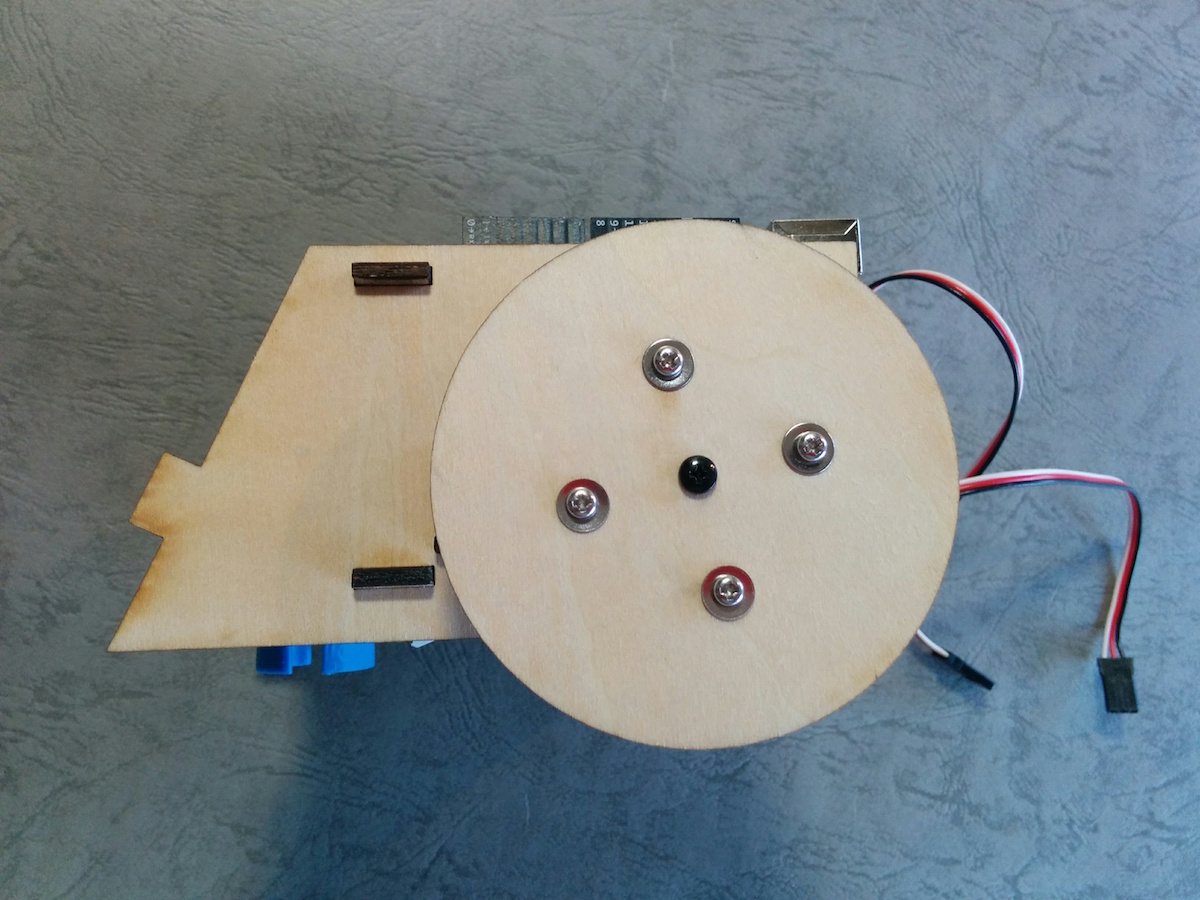
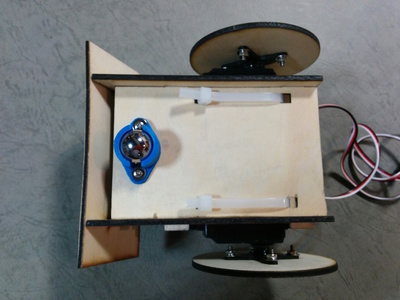
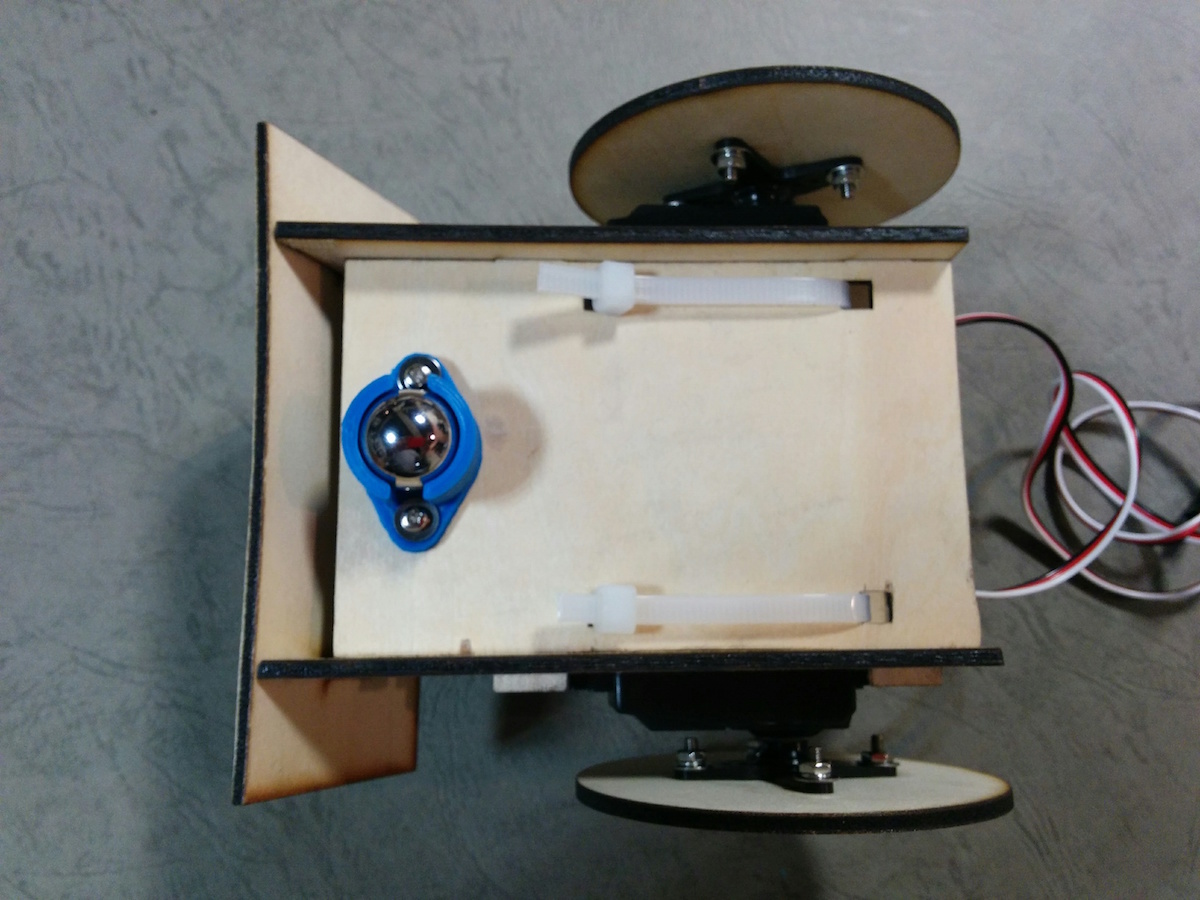
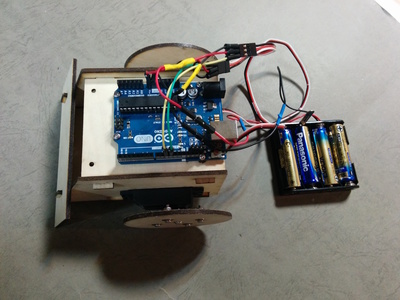
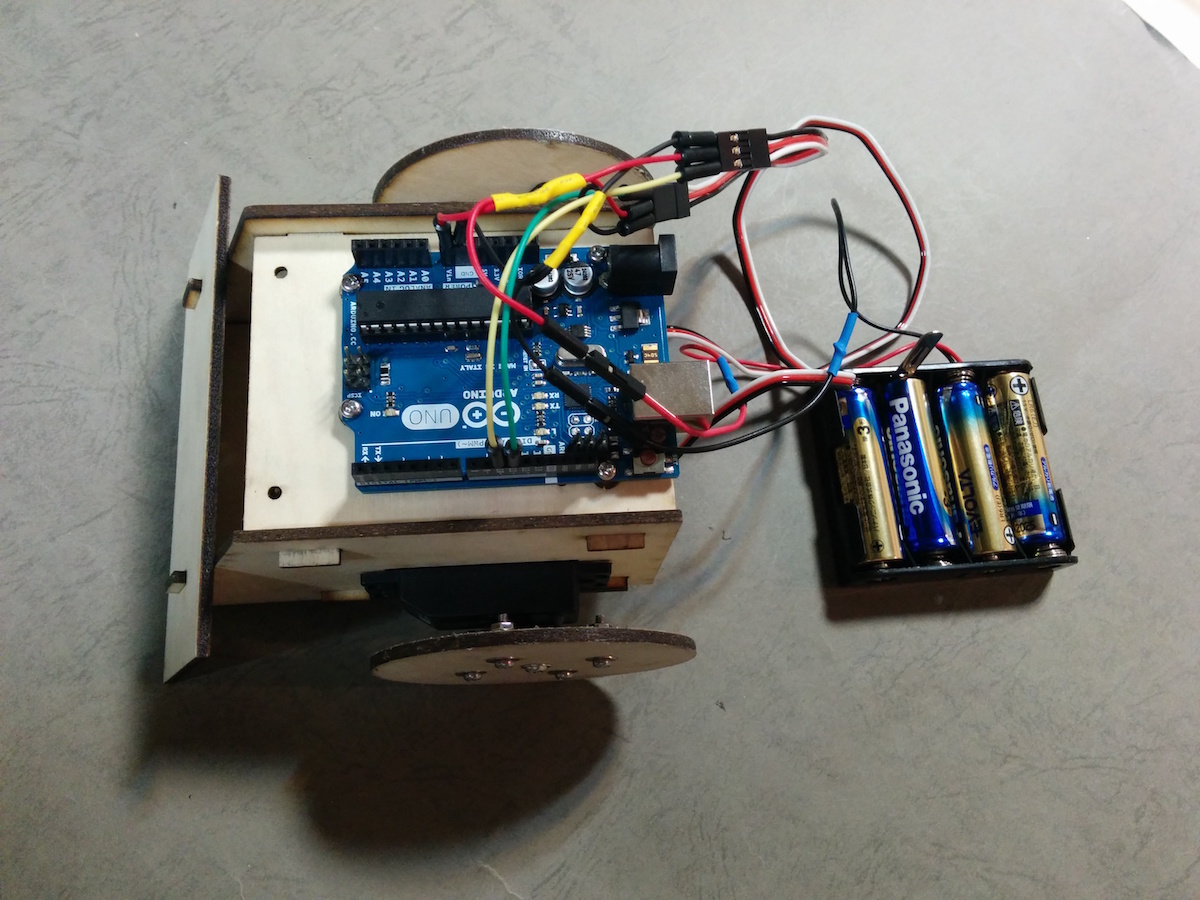
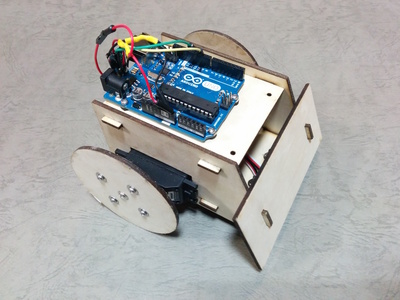
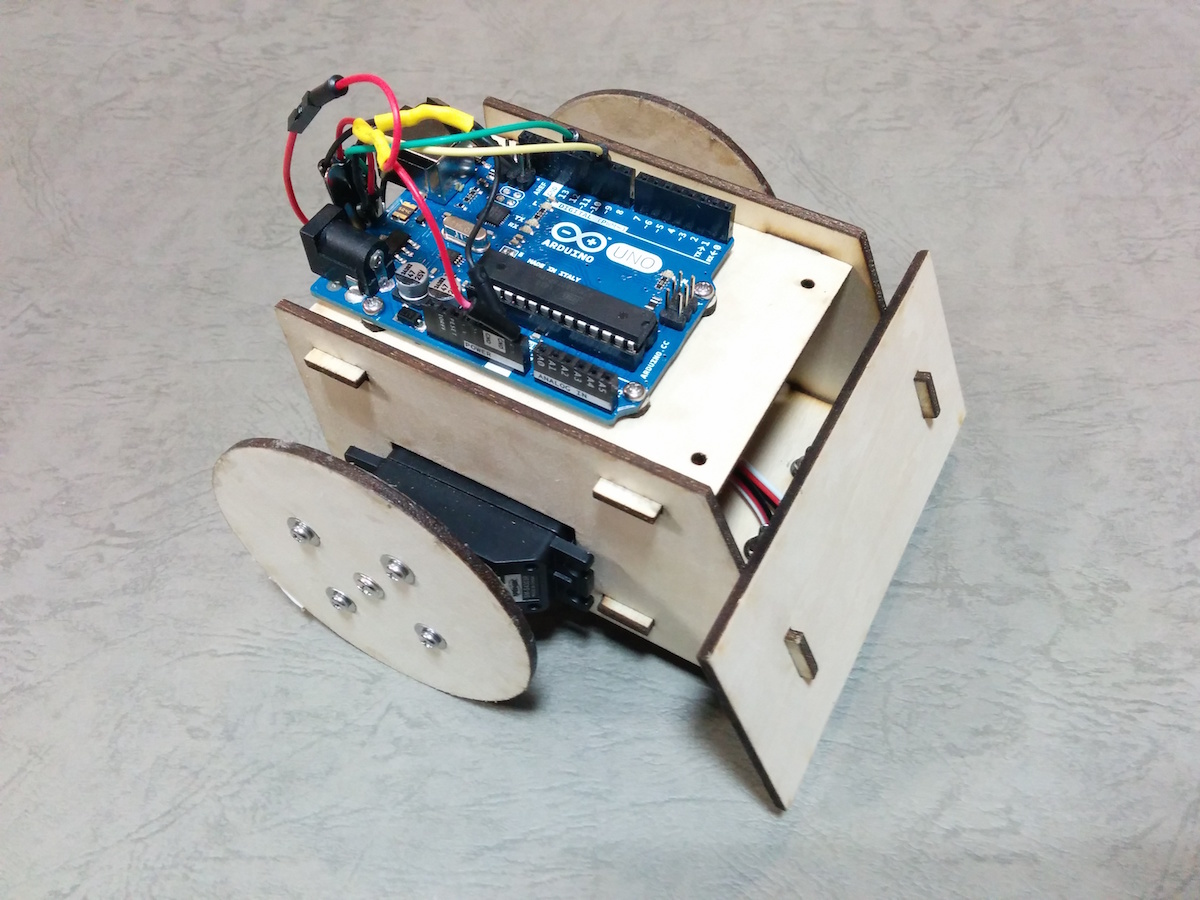
車体の組み立て0オリジナルのサイトで動画が公開されています。Sumobot Jr Assembly video for Nodebots Day 7/27その10ボールキャスタの穴をキリでM2.6のネジが入るように大きくしますその20ボールキャスタを底板にネジで固定しますその30サーボホーン (サーボの付属品) の穴をキリでM2.6のネジが入るように大きくしますその40サーボホーンを車輪にネジで固定しますその50サーボを底板に結索バンドで固定しますその60Arduino を上板にスペーサーをかましてネジで固定しますその70上板を車体に取り付けますその80車輪を車体に木ネジ (サーボの付属品) で取り付けますその90前板を車体に取り付けますその100ボールをボールキャスタにはめ込みますAdd Annotation Order
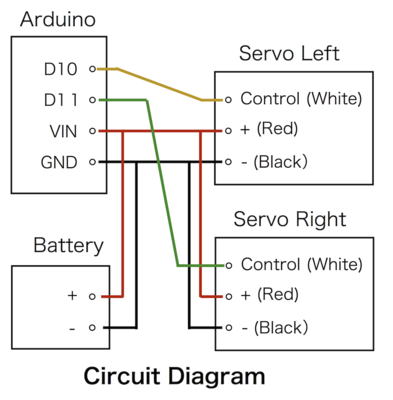
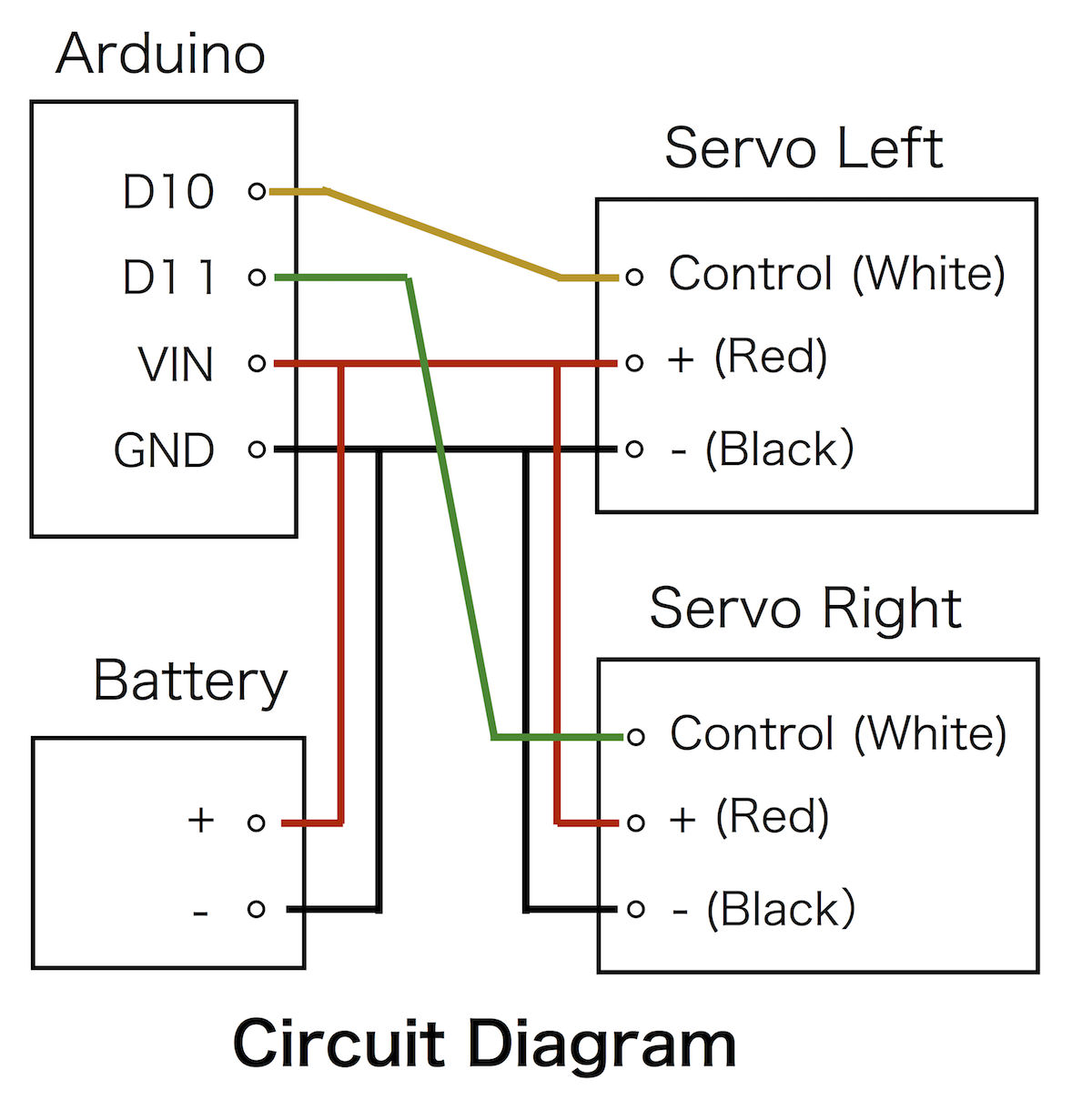
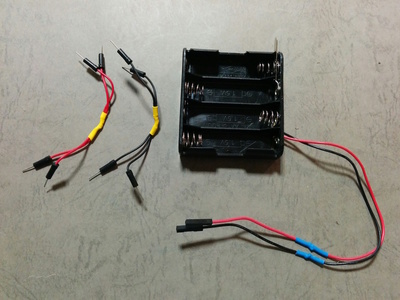
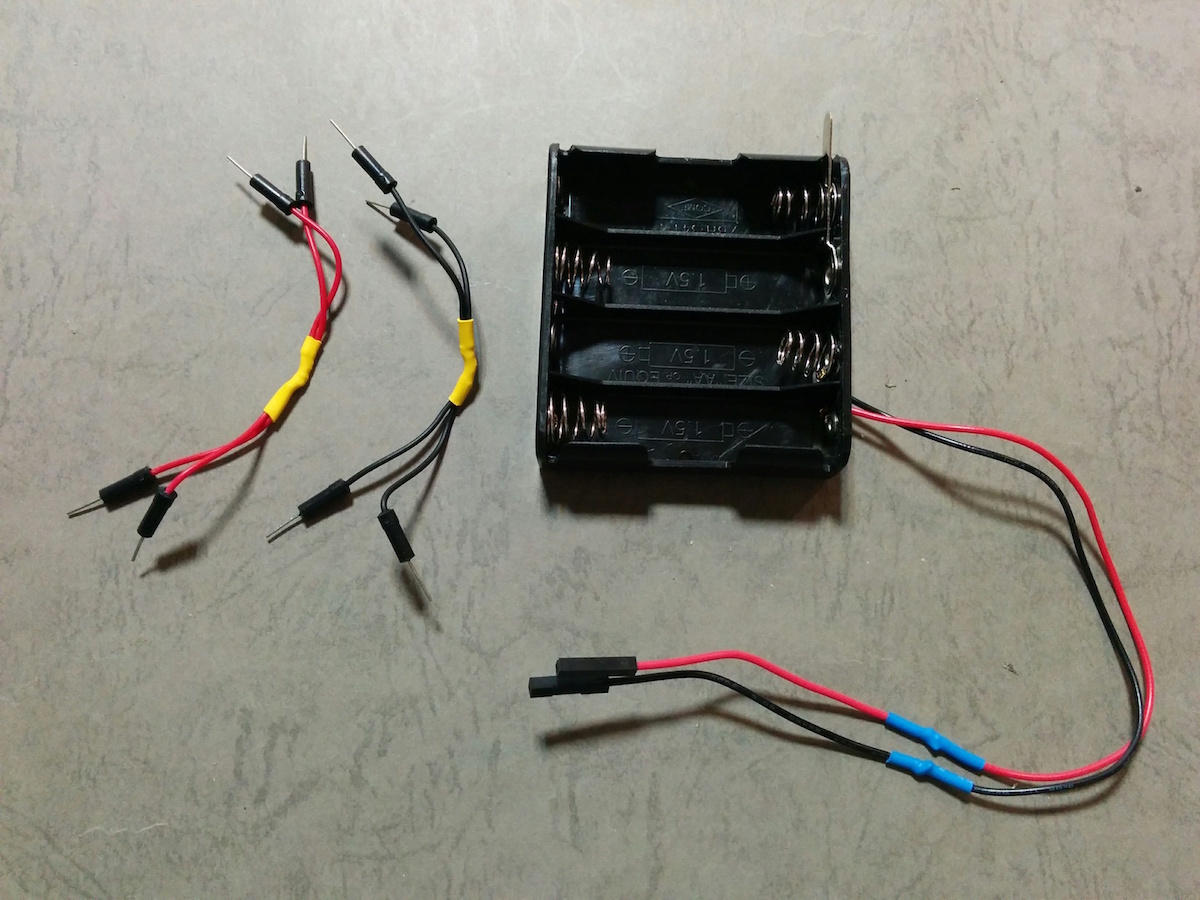
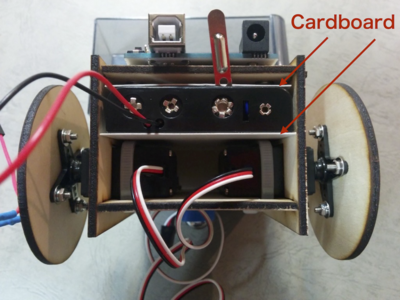
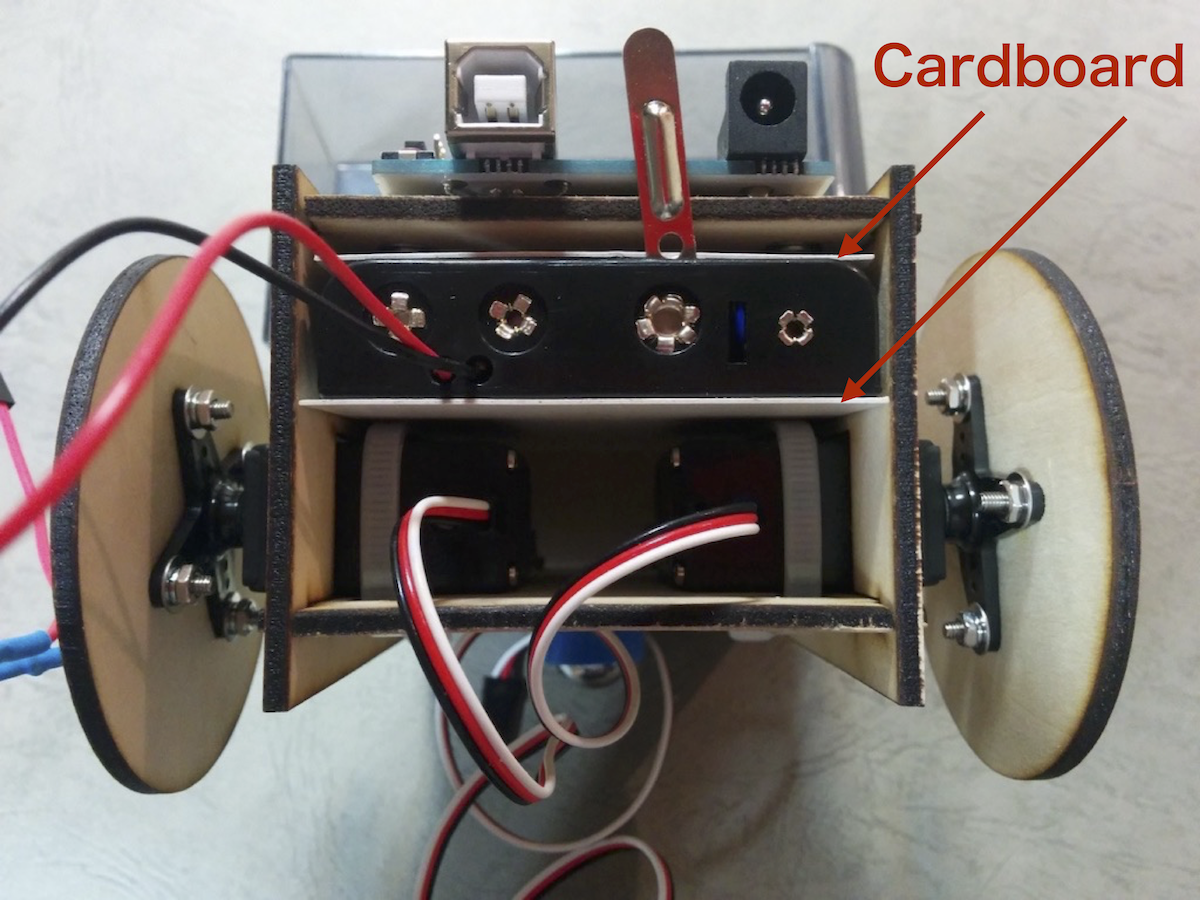
配線0回路図その10電池ボックスにメスのジャンパー線を半田付けします。オスのジャンパー線を半田付けして、4つ口にします。その20Arduinoと電池ボックスと2個のサーボを結線しますその30電池ボックスを車体に入れます。電池ボックスの上下に厚紙を入れると、ほどよい感じで固定されます。Add Annotation Order
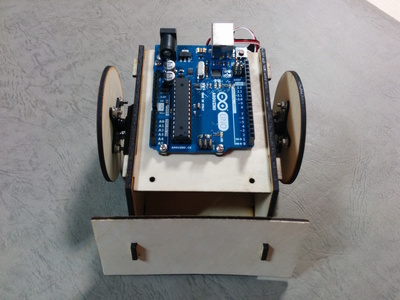
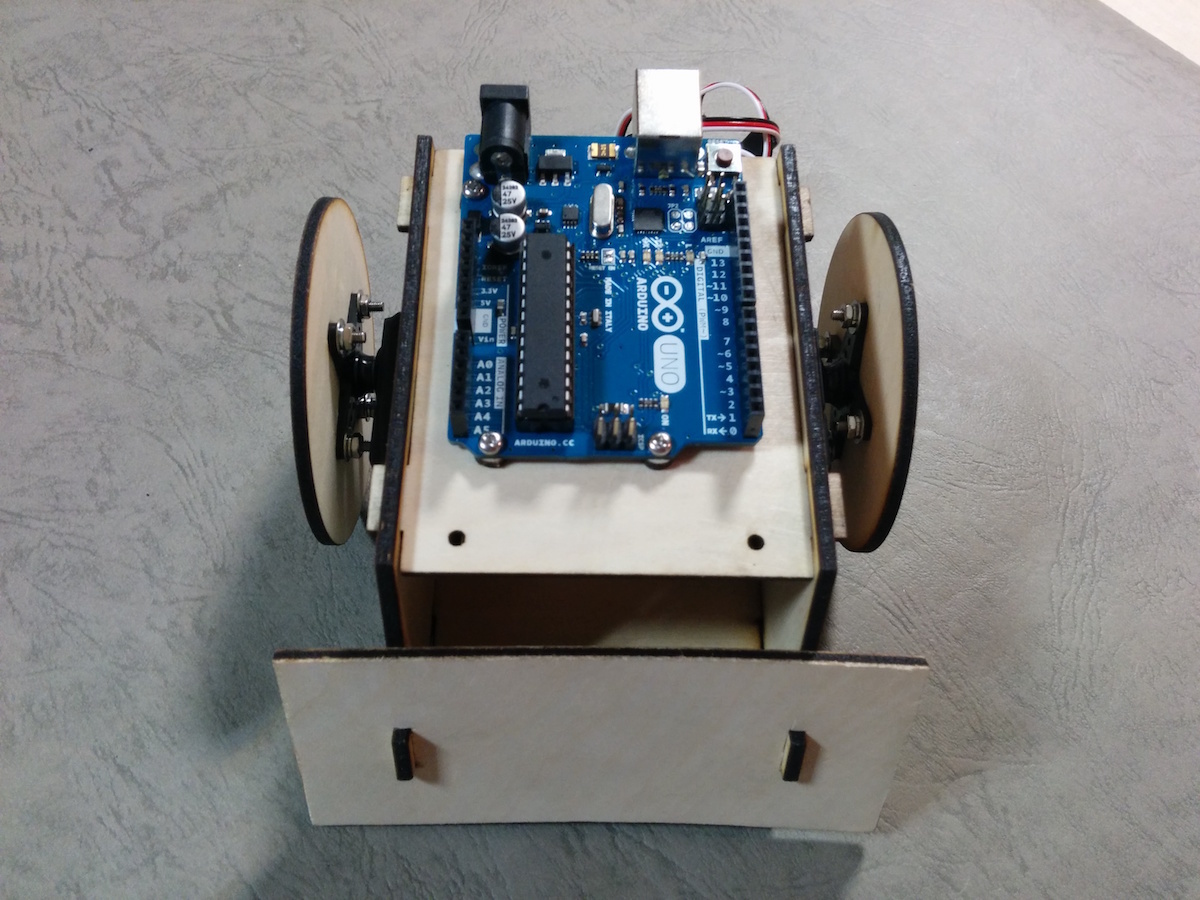
プログラム0Arduino にスケッチ sumobot turn を書き込みます。電源を入れます。Sumobot Jr が左回転と右回転を繰り返せば、OKです。動画はこちらにAdd Annotation Order










Comments