

メモ
03Dでプリンタで作ったパーツは割れやすいのでそのうちレーザーカッターで作ったバージョンも公開予定
FabWalker / WalkingTree
Owner & Collaborators
License
FabWalker / WalkingTree by KazuhiroJinnouchi is licensed under the Creative Commons - Attribution-NonCommercial-ShareAlike license.
Summary
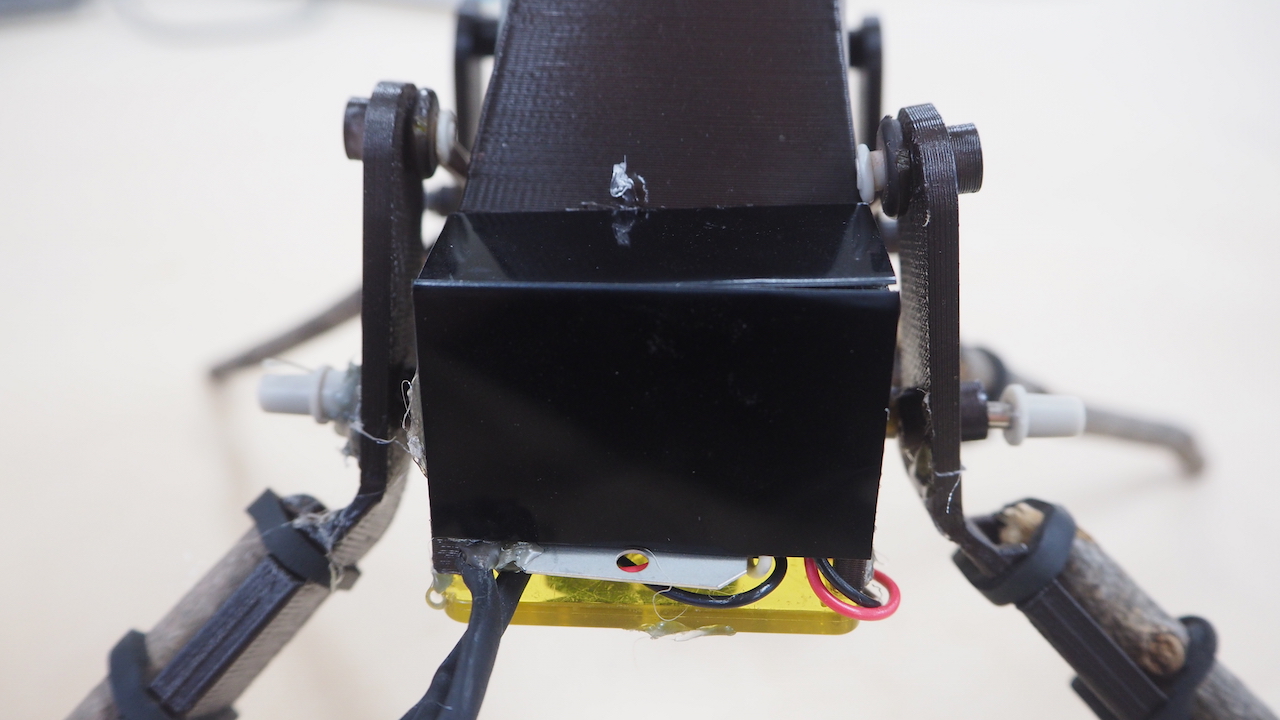
walkingtreeは自然から最適な木の枝や植物を採取し胴体とすることで,歩く植物とする自立型ロボット玩具である.上部の植木鉢に採取した植物や木の枝を植え,体験者の想像した歩行植物ロボットとして完成する.
完成後は,自立したロボットとして動き始める.太陽光の当たる場所に辿り着くと,動力のモーターはソーラー充電器により蓄電され,上部に植えられた植物は光合成を行う.太陽光エネルギーによって光合成と発電を行う,いわば動く植物である.
完成後は,自立したロボットとして動き始める.太陽光の当たる場所に辿り着くと,動力のモーターはソーラー充電器により蓄電され,上部に植えられた植物は光合成を行う.太陽光エネルギーによって光合成と発電を行う,いわば動く植物である.
Materials
Tools
Blueprints
Making
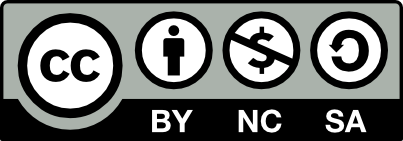
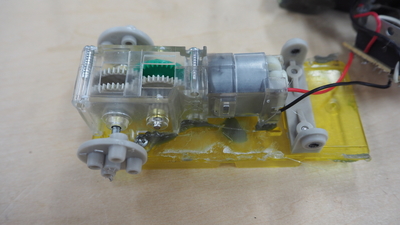
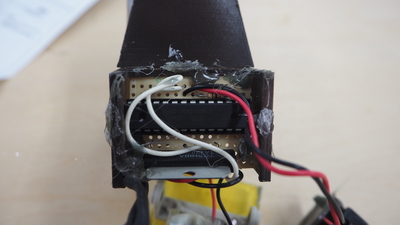
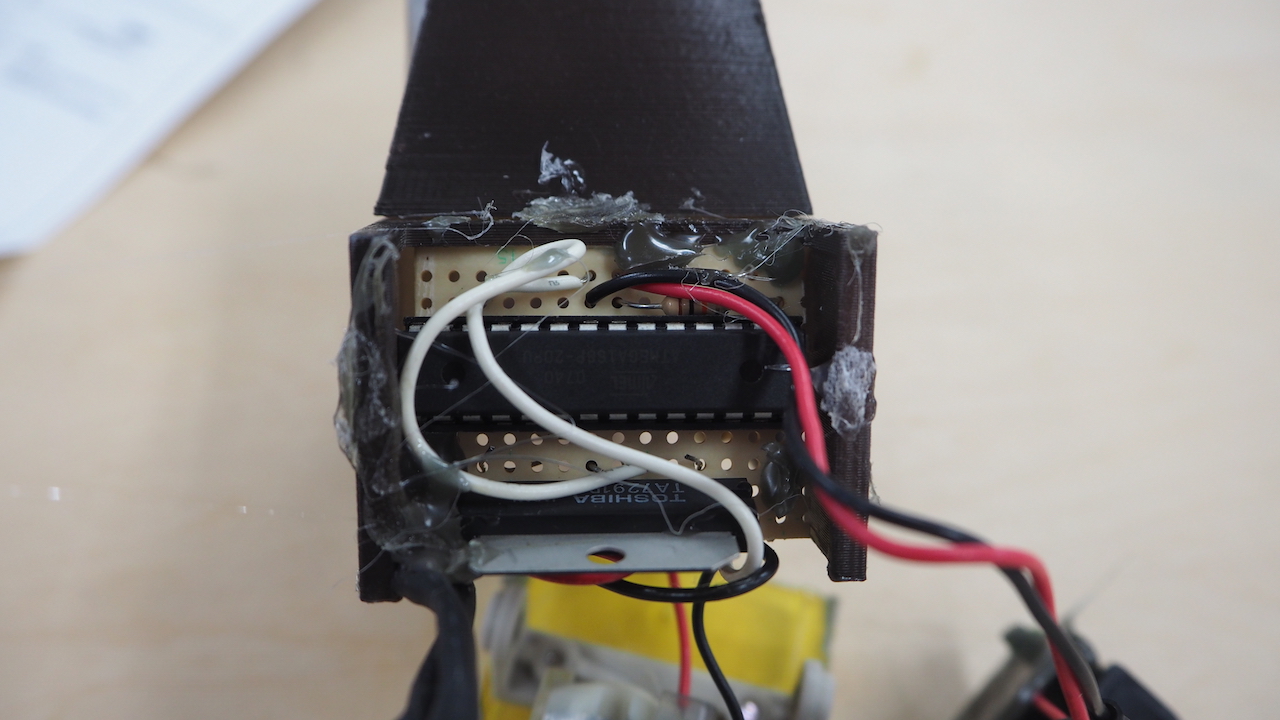
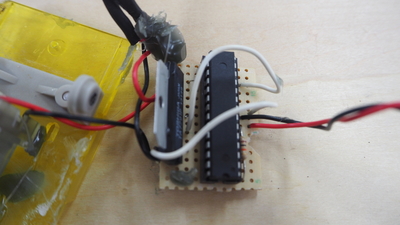
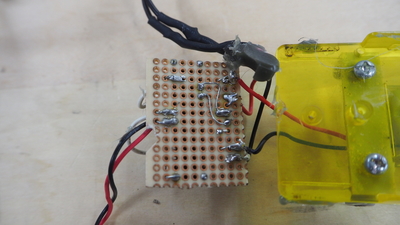
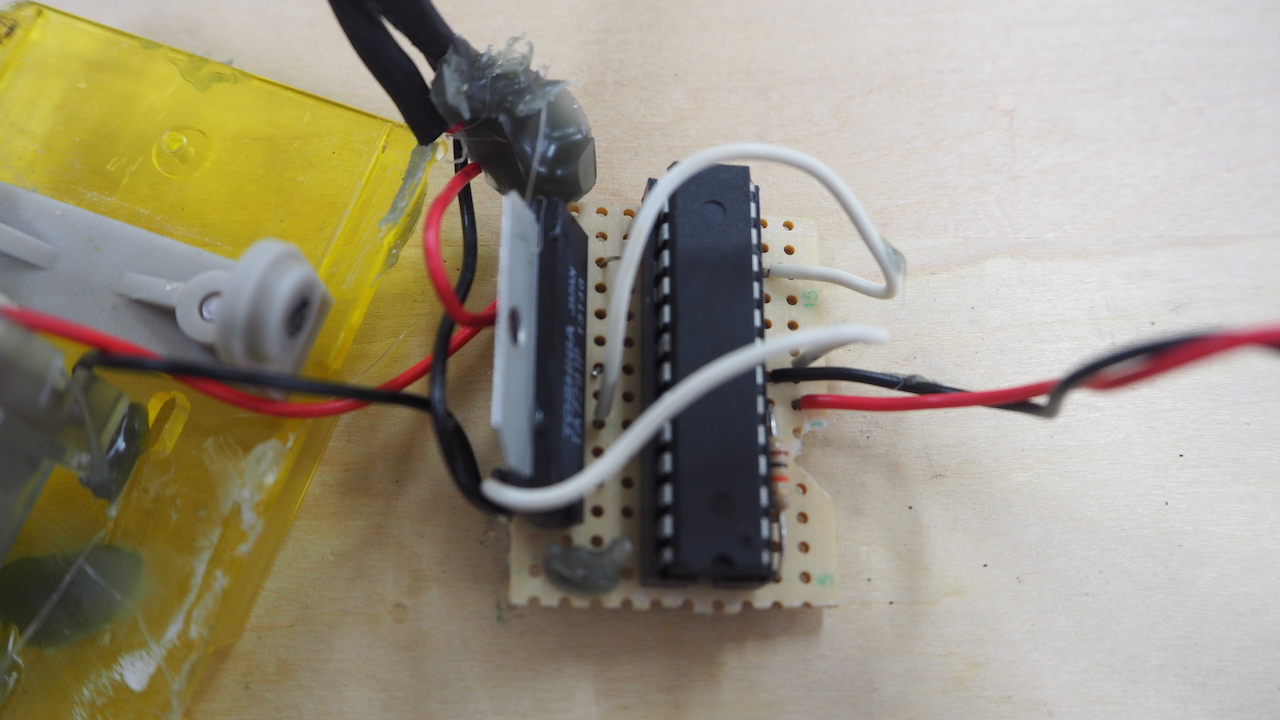
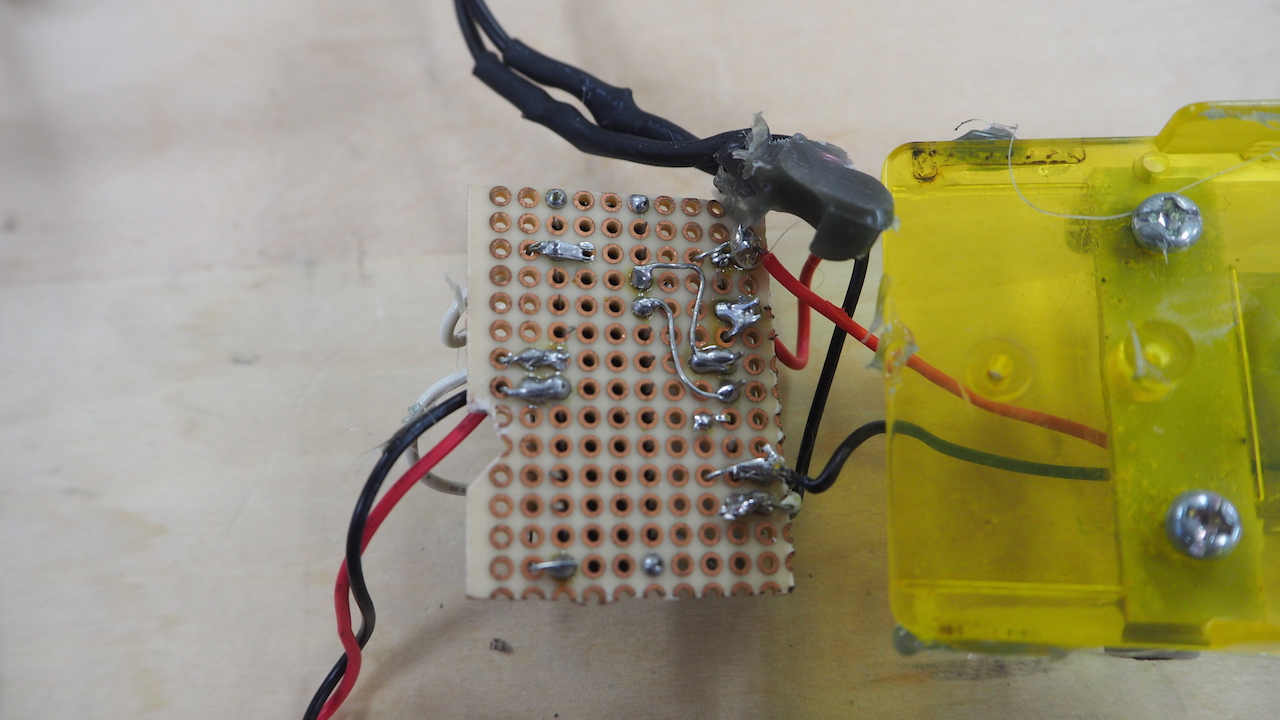
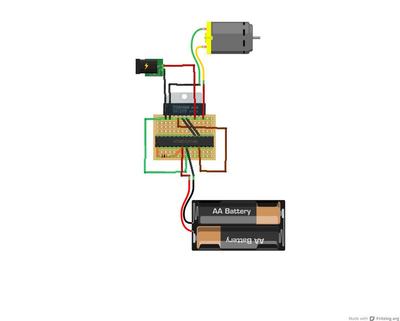
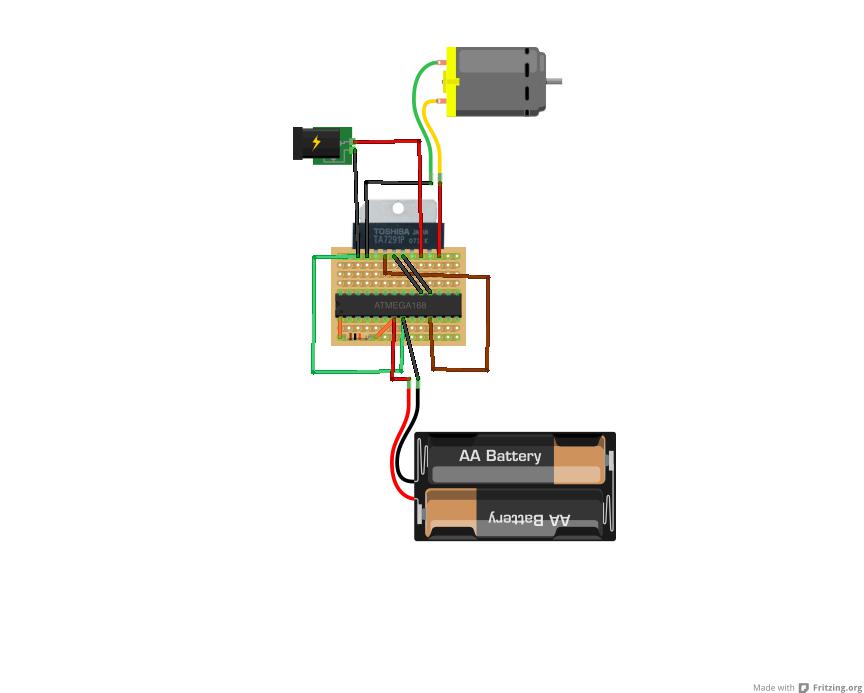
- タミヤ ロボクラフトシリーズ メカキリンを開封し、説明書③〜⑤に従ってギアボックスを組み立てる。このとき、逆転スイッチは使用しないので取り付けなくてよい。また電池ボックスはマイコンに接続するので、ここではモータとは配線しない。
- ただちょっとこれは初心者には難しめなので、Arduinominiとか Trinket使ったバージョンも公開します。参考http://jun1chi.blogspot.jp/2012/02/atmega328parduino-pro-33v-8mhz.html
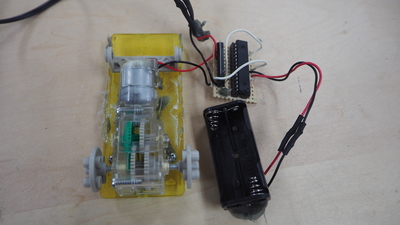
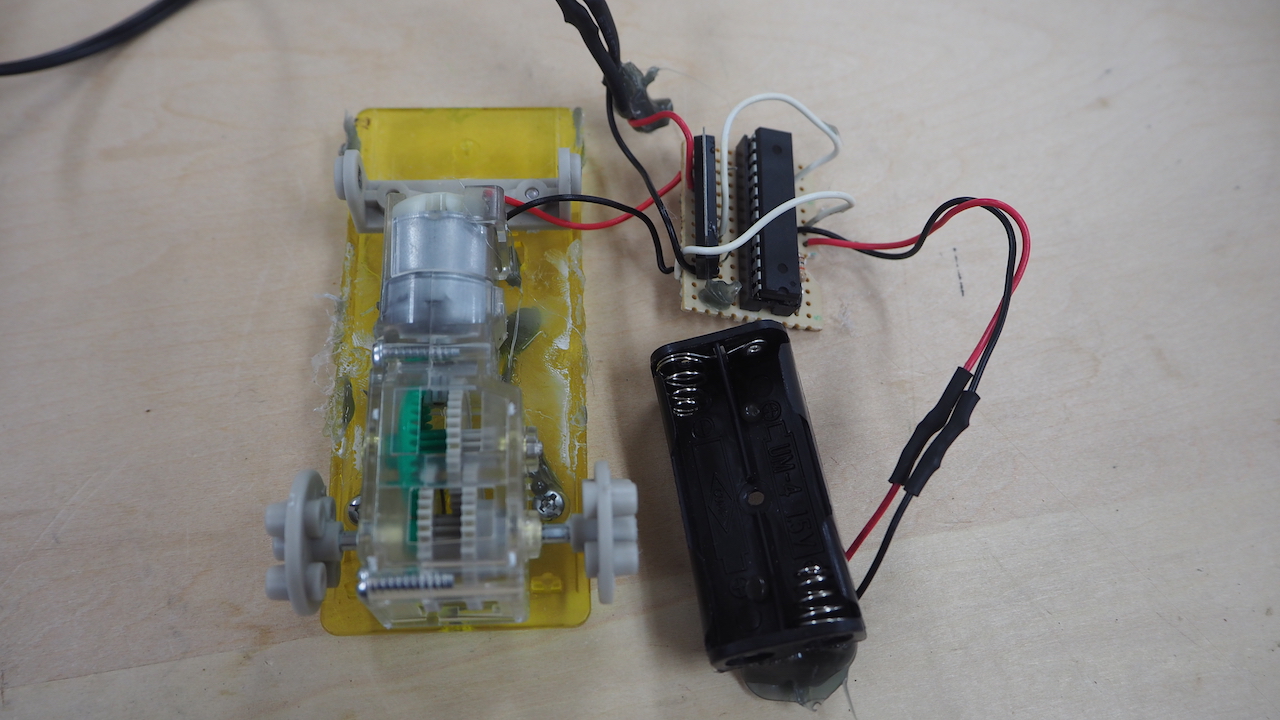
- 接着剤などでギアボックスに体パーツをつける
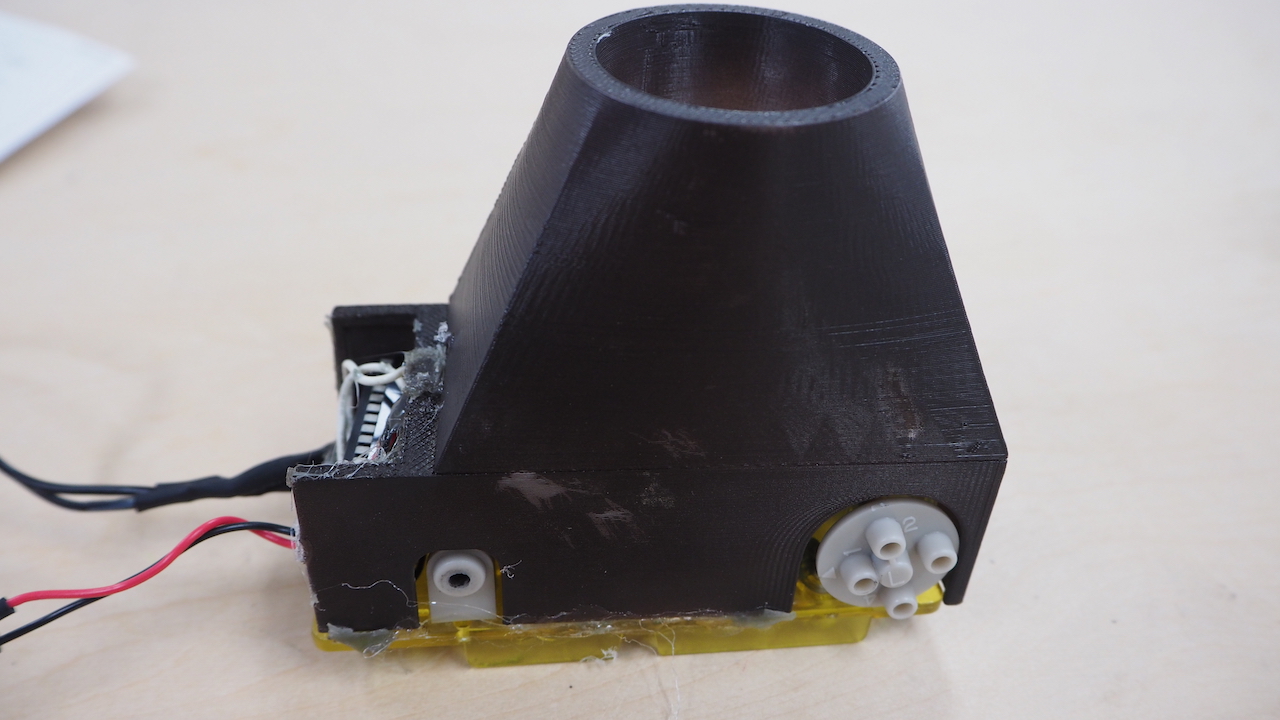
- グルーガンなど使うとつけやすい
- プラ版とかでカバーを作ってつける
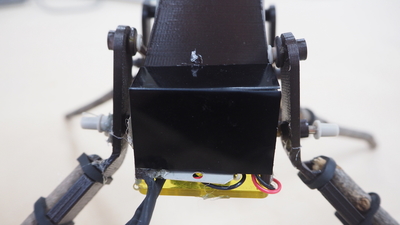
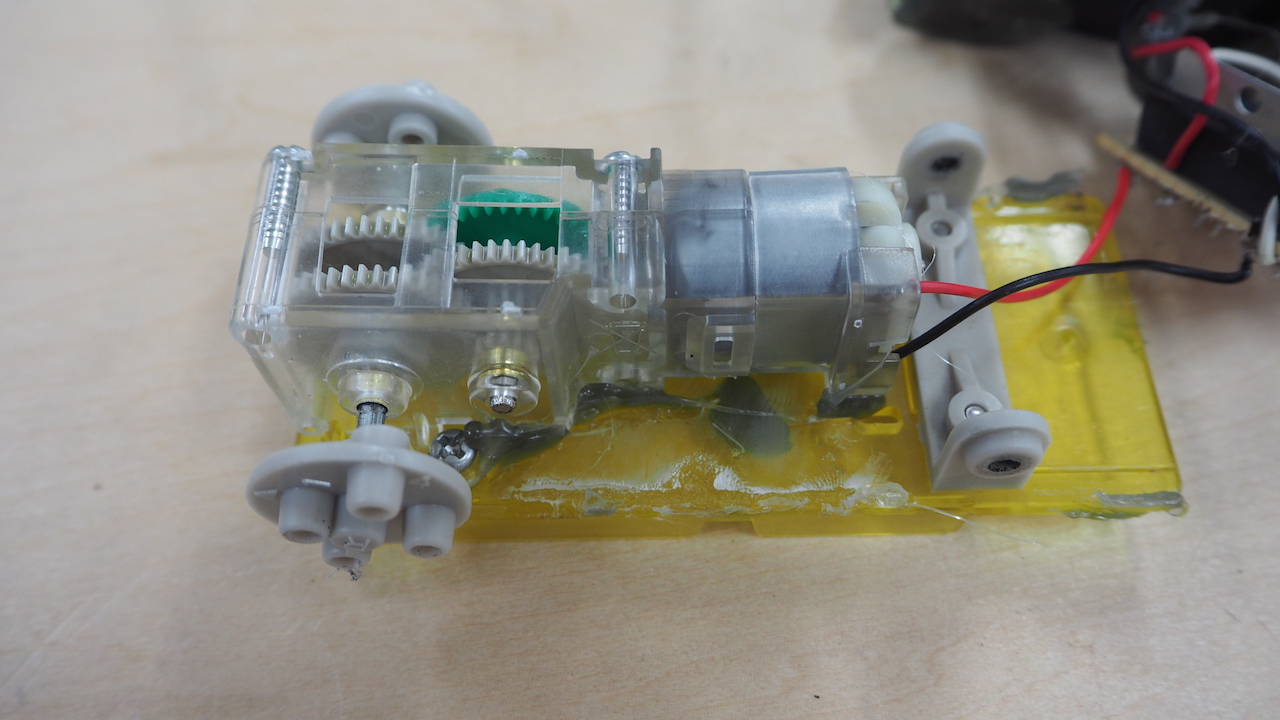
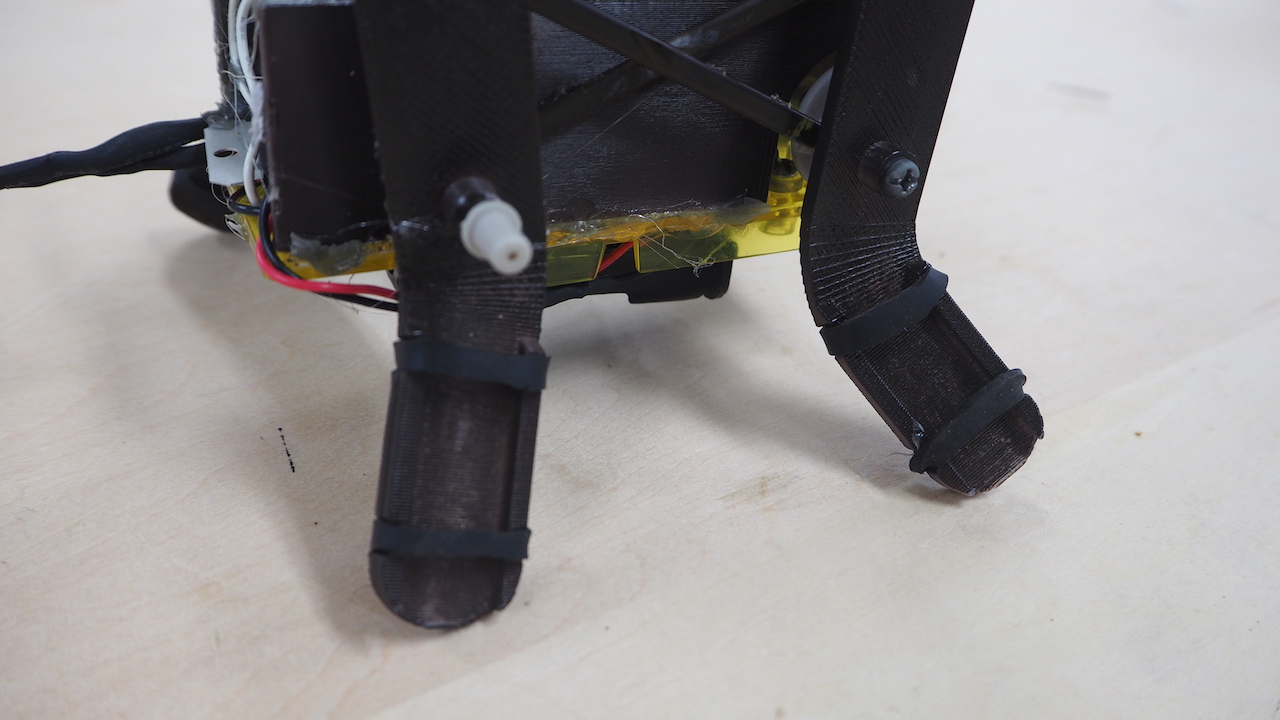
- タミヤ メカキリンの説明書⑦〜⑨を参考にしながらギアボックスに造形した脚パーツを付ける。脚パーツには、木の枝などを取り付けるための輪ゴムをはめる。ゴムは何でも良いが、直径15mmのゴムチューブを輪切りにして使用した。

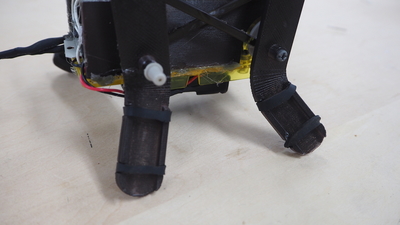
- 公園や森で適切な長さの木の枝や花、草などを採取してくる。植木鉢部分につける植物は、クッションシートなどで包んでいると入れやすい。


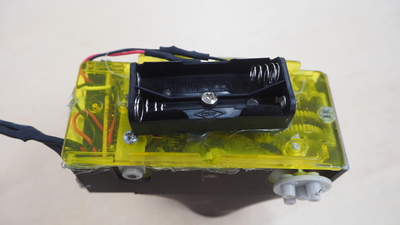
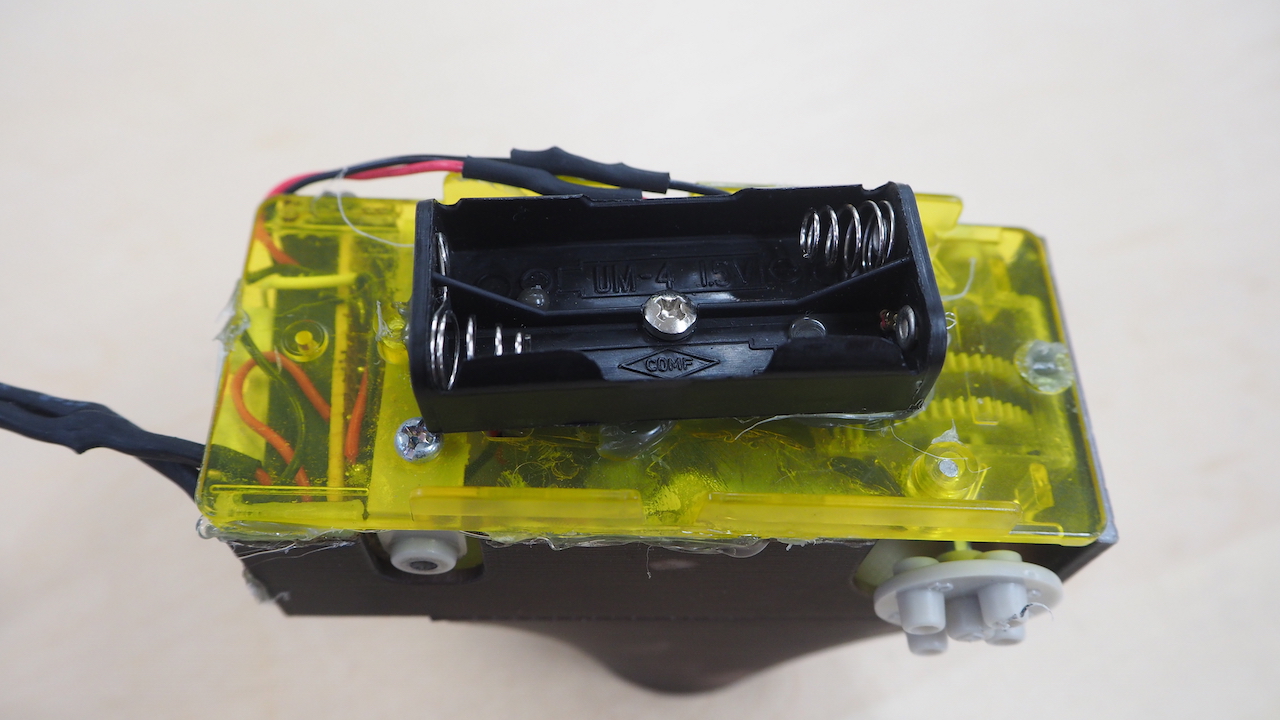
完成
0




References
Usages
Project comments

Comments